Область техники
Настоящее изобретение относится к области технологии автоматического управления автотранспортным средством (далее - автомобиль) и, в частности, к способу и системе планирования поперечной траектории автоматической смены полосы движения автомобиля, к автомобилю и носителю информации.
Уровень техники
С развитием технологий искусственного интеллекта, технологий мультисенсорной интеграции и технологий управления и принятия решений растёт спрос на автоматическое управление транспортными средствами. В зависимости от сценария применения, технических возможностей и т.п. автономных транспортных средств существует пять уровней от L1 до L5, где L2 - это расширенная помощь при вождении, L3 - это условное автоматическое вождение, L4 - полностью автоматическое вождение в ограниченном пространстве и L5 - полностью автоматическое вождение.
В настоящее время промышленность сосредоточена на массовом производстве систем уровней L2 и L3. На этих уровнях технология в основном нацелена на возможность ограниченного автоматизированного вождения по сценарию скоростной городской дороги или высокоскоростного шоссе, включая такие основные функции, как центрирование в полосе движения, адаптивный круиз-контроль и автоматическая смена полосы движения.
Действующий способ планирования поперечной траектории автоматической смены полосы движения автомобиля в основном делится на два типа: способ, основанный на карте высокой точности, и способ, основанный на позиционировании линии полосы движения. Способ планирования траектории, основанный на высокоточной карте, характеризуется высокой точностью и сильной защитой от помех, однако система сложна и дорогостояща. В настоящее время способ не применим для массового осуществления.
Что касается вышеуказанной технической задачи, по ней не было предложено ещё ни одного эффективного решения.
Сущность изобретения
По меньшей мере в некоторых вариантах осуществления настоящего изобретения представлен способ и система планирования поперечной траектории автоматической смены полосы движения автомобиля, автомобиль и носитель данных, которые могут повысить эффективность вычислений при построении такой траектории.
В варианте осуществления настоящего изобретения представлен способ планирования поперечной траектории автоматической смены полосы движения автомобиля, включающий следующие этапы:
(1) обработка информации:
получение данных инструкции в отношении автоматической смены полосы движения, выводимых системой принятия решений, и определение, следует ли начинать автоматическую смену полосы движения, при этом в случае определения начала автоматической смены полосы движения выполняется приём данных об осевой линии полосы движения хост-автомобиля (ведомого автотранспортного средства), осевой линии целевой полосы движения и скорости V хост-автомобиля, выводимых системой датчиков в реальном времени, а в случае не определения начала автоматической смены полосы движения - завершение процесса;
(2) расчёт параметров автоматической смены полосы движения:
в начальный момент времени автоматической смены полосы движения выполняется вычисление относительного поперечного расстояния TargetA0 между осевой линией целевой полосы и осевой линией полосы движения хост-автомобиля, а также вычисление параметра времени Т, используемого для построения поперечной траектории автоматической смены полосы в сочетании с калибровочной переменной, указывающей скорость процесса смены полосы;
(3) построение кривой пятого порядка для автоматической смены полосы:
в каждый момент времени автоматической смены полосы выполняется расчёт параметров N0, N1, N2, N3, N4, N5 уравнения кривой пятого порядка в соответствии с относительным поперечным расстоянием TargetA0 между осевой целевой полосы и осевой полосы хост-автомобиля, а также параметр времени T, используемый для планирования поперечного отклонения при автоматической смене полосы; и, кроме того, вычисление требуемого поперечного расстояния Starget, требуемой поперечной скорости Vtarget и требуемого поперечного ускорения Atarget в момент времени t;
(4) выработка инструкции поперечного управления для автоматической смены полосы движения:
расчёт параметров A0lc, A1lc, A2lc, A3lc уравнения кубической кривой траектории изменения полосы движения в момент времени t в соответствии с требуемым поперечным расстоянием Starget, требуемой поперечной скоростью Vtarget и требуемым поперечным ускорением Atarget и в сочетании с параметрами A0lk, A1lk, A2lk, A3lk уравнения кубической кривой осевой линии полосы движения хост-автомобиля, расчёт параметров A0, A1, A2, A3 уравнения кубической кривой траектории для поперечного управления и вывод параметров A0, A1, A2, A3 уравнения кубической кривой траектории на контроллер поперечного управления для выполнения поперечного управления при автоматической смене полосы движения;
(5) расчёт завершения автоматической смены полосы движения:
когда одновременно выполняются два следующих условия, считается, что автоматическая смена полосы движения завершена:
(a) период времени, используемый для автоматической смены полосы движения, больше, чем параметр времени T построения поперечной траектории автоматической смены полосы движения;
(b) параметр A0 кубического уравнения траектории, используемый для поперечного управления, меньше, чем предельное значение A0Comp, а период времени A0 < A0Comp меньше, чем предельное значение TComp;
после завершения автоматической смены полосы движения вычисление кривой пятого порядка процедуры планирования и инструкция поперечного управления автоматической сменой полосы останавливаются, если же автоматическая смена полосы не завершена, процесс возвращается к этапу (3).
В варианте осуществления на этапе (1) осевая линия полосы движения хост-автомобиля выражается аппроксимацией (построением по точкам) кубической кривой для получения ylk=A0lk+A1lkx+A2lkx2+A3lkx3, где ylk - поперечное расстояние, x - продольное расстояние, а A0lk, A1lk, A2lk and A3lk - параметры уравнения кубической кривой осевой линии полосы движения хост-автомобиля;
осевая целевой полосы выражается через аппроксимацию кубичесой кривой с получением ylt=A0lt+A1ltx+A2ltx2+A3ltx3, где ylt - поперечное расстояние, x - продольное расстояние, а A0lt, A1lt, A2lt and A3lt - параметры уравнения кубической кривой осевой линии целевой полосы движения автомобиля.
В варианте осуществления на этапе (2) формула вычисления временного параметра T для планирования поперечной траектории автоматической смены полосы движения имеет следующий вид:

 ;
;
формула расчёта относительного поперечного расстояния TargetA0 между осевой линией целевой полосы и осевой линией полосы хост-автомобиля:
TargetA0 = A0lt - A0lk.
В варианте осуществления на этапе (3) способ вычисления параметров N0, N1, N2, N3, N4, N5 уравнения кривой пятого порядка:
построение матрицы  ;
;
построение матрицы  ;
;
где Vi - поперечная составляющая скорости в начале автоматической смены полосы, aj - поперечное ускорение в начале автоматической смены полосы, Vf - поперечная составляющая скорости в конце автоматической смены полосы и af - поперечное ускорение в конце автоматической смены полосы;
решение матричного уравнения:

для получения c(1), c(2), c(3), и затем - получения параметра уравнения кривой пятого порядка  .
.
В варианте осуществления на этапе (3)
требуемое поперечное расстояние Starget = N0 + N1t + N2t2 + N3t3 + N4t4 + N5t5;
требуемая поперечная скорость Vtarget = N1 + 2N2t + 3N3t2 + 4N4t3 + 5N5t4;
и требуемое поперечное ускорение Atarget = 2N2+6N3t+12N4t2+20N5t3.
В варианте осуществления на этапе (4), A0lc = Starget; A1lc = Vtarget /V; A2lc= Atarget /(2*V2); A3lc = 0.
В варианте осуществления на этапе (4), [A0, A1, A2, A3] = [ A0lc+A0lk, A1lc+A1lk, A2lc+A2lk, A3lc+A3lk].
В другом варианте осуществления настоящего изобретения также представлена система планирования поперечной траектории автоматической смены полосы движения автомобиля, включающая память и контроллер, где память хранит машиночитаемую компьютерную программу, а контроллер вызывает машиночитаемую компьютерную программу для выполнения этапов способа планирования поперечной траектории автоматической смены полосы движения автомобиля согласно настоящему изобретению.
В другом варианте осуществления настоящего изобретения представлен, кроме того, автомобиль, в котором применена система планирования поперечной траектории автоматической смены полосы движения согласно настоящему изобретению.
В другом варианте осуществления настоящего изобретения дополнительно представлен носитель данных, на котором хранится машиночитаемая программа, при этом машиночитаемая программа при вызове контроллером может выполнять этапы способа планирования поперечной траектории автоматической смены полосы движения транспортного средства согласно настоящему изобретению.
По крайней мере некоторые варианты осуществления настоящего изобретения имеют указанные ниже преимущества.
(1) Применена главенствующая в настоящее время схема позиционирования направления полосы движения автотранспорта для осуществления планирования траектории автоматической смены полосы движения, являющаяся испытанной и надёжной.
(2) Эта схема совместима с применяемой сейчас функцией центрирования полосы дорожного движения, что снижает издержки и обеспечивает массовость производства.
(3) Предложенный способ планирования траектории имеет высокую вычислительную эффективность и отвечает уровню требований к выполнению бортовых вычислений.
(4) Видеокамера используется для получения информации о полосе движения без применения для позиционирования карты высокой точности, благодаря чему имеет высокую помехоустойчивость.
Краткое описание чертежей
На чертеже представлена блок-схема последовательности этапов способа планирования поперечной траектории автоматической смены полосы движения автомобиля в соответствии с вариантом осуществления настоящего изобретения.
Подробное описание
Далее настоящее изобретение описывается более подробно со ссылкой на прилагаемые чертежи.
В качестве варианта осуществления настоящего изобретения аппаратные средства, привлечённые для реализации способа планирования поперечной траектории автоматической смены полосы движения автомобиля, могут включать, не ограничиваясь ими: систему датчиков, выполненную с возможностью определения и вывода данных осевой линии полосы движения ведомого (хост-)автомобиля, целевой осевой линии полосы дорожного движения и скорости хост-автомобиля в реальном времени; систему принятия решений по автоматической смене полосы, выполненную с возможностью вывода информации инструкции по автоматической смене полосы; систему планирования поперечной траектории автоматической смены полосы, выполненную с возможностью предварительного расчёта уравнения поперечной кривой пятого порядка для автоматической смены полосы в реальном времени, вычисления требуемого поперечного расстояния, требуемой скорости и требуемого ускорения, а также расчёта параметров кубической кривой, конфигурируемой для поперечного управления; и контроллер бокового управления автоматической сменой полосы движения, выполненный с возможностью приёма параметров кубической кривой, рассчитанных системой планирования поперечной траектории автоматической смены полосы, и завершения соответствующих действий поперечного управления.
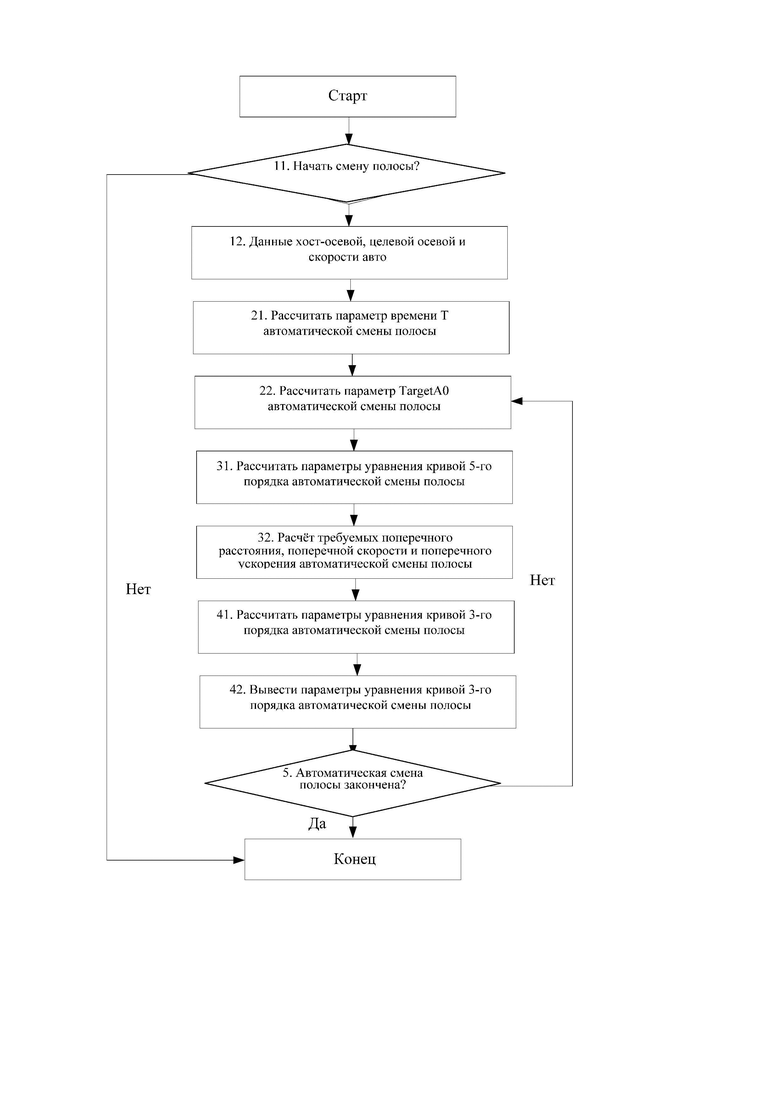
Как показано на фиг. 1, в данном варианте осуществления представлен способ планирования поперечной траектории автоматической смены полосы движения автомобиля, включающий описываемые ниже этапы.
(1) Обработка информации.
11. Получение данных инструкции автоматической смены полосы движения, выводимой системой принятия решений, и определение, начинать ли автоматическую смену полосы движения; в случае определения начала автоматической смены полосы движения - переход к этапу 12; в случае не определения начала автоматической смены полосы движения - завершение процесса.
12. Получение информации, выводимой системой датчиков в реальном времени, включая данные: осевой линии полосы движения ведомого автомобиля, выраженной аппроксимацией кубической кривой с получением ylk=A0lk+A1lkx+A2lkx2+A3lkx3, где ylk - поперечное расстояние, x - продольное расстояние; осевой линии целевой полосы, выраженной аппроксимацией кубической кривой с получением ylt=A0lt+A1ltx+A2ltx2+A3ltx3, где ylt - поперечное расстояние, x - продольное расстояние; и скорости V хост-автомобиля.
(2) Расчёт параметров автоматической смены полосы движения.
12. Расчёт параметра времени T, затраченного на планирование поперечной траектории автоматической смены полосы движения, по формуле: , где rate (скорость) - калибровочная переменная, определяющая скорость процесса смены полосы движения, причём вычисление выполняется один раз в момент начала каждого процесса смены полосы движения; при этом в ходе фактического процесса смены полосы движения величина временного параметра T в среднем составляет между 6 и 8 секундами.
22. Вычисление относительного поперечного расстояния TargetA0 = A0lt - A0lk между осевой линией целевой полосы движения и осевой линией полосы движения ведомого автомобиля в соответствии с параметрами осевой линии целевой полосы движения и осевой линией полосы движения ведомого автомобиля, полученными на этапе 12.
(3) Построение кривой пятого порядка для автоматической смены полосы.
31. Вычисление уравнения кривой пятого порядка y = N0+N1t+N2t2+N3t3+N4t4+N5t5 для планирования поперечной траектории смены полосы движения в момент времени t согласно TargetA0, полученному на этапе 22, где N0, N1, N2, N3, N4, N5 - параметры уравнения кривой пятого порядка, а y - поперечное расстояние; вычисление параметров N0, N1, N2, N3, N4, N5 уравнения кривой пятого порядка выполняется путём
построения матрицы  ,
,
где T - параметр времени, полученный вычислением на этапе 2;
построения матрицы ,
где TargetA0 - поперечное расстояние, полученное вычислением на этапе 2, Vi, aj - соответственно, поперечная скорость и поперечное ускорение (обычно принимаемое за 0) в начале автоматической смены полосы, а Vf, af - соответственно, поперечная скорость и поперечное ускорение (обычно принимаемое за 0) в конце автоматической смены полосы;
решения матричного уравнения:
с получением c(1), c(2), c(3) и последующим получением параметра  уравнения кривой пятого порядка.
уравнения кривой пятого порядка.
32. Вычисление требуемого поперечного расстояния
Starget = N0+N1t+N2t2+N3t3+N4t4+N5t5;
требуемой боковой скорости Vtarget = N1+2N2t+3N3t2+4N4t3+5N5t4
и требуемого поперечного ускорения Atarget = 2N2+6N3t+12N4t2+20N5t3 в момент времени t.
(4) Выработка инструкции поперечного управления для автоматической смены полосы движения.
41. Расчёт параметров A0lc, A1lc , A2lc, A3lc уравнения кубической кривой траектории смены полосы движения в момент времени t в соответствии с требуемым поперечным расстоянием Starget , требуемой поперечной скоростью Vtarget и требуемым поперечным ускорением A target, рассчитанными на этапе 33, и скоростью V хост-автомобиля, полученной на этапе 11, при этом A0lc = Starget; A1lc = Vtarget /V; A2lc = Atarget /(2*V2); A3lc = 0.
42. Получение параметров уравнения кубической кривой траектории [A0, A1, A2, A3] = [A0lc + A0lk, A1lc + A1lk, A2lc + A2lk, A3lc + A3lk ] для поперечного управления согласно параметрам A0lk, A1lk, A2lk и A3lk уравнения кубической кривой центральной линии полосы движения ведомого автомобиля и вывод информации на контроллер поперечного управления для выполнения поперечного управления при автоматической смене полосы движения.
(5) Расчёт завершения автоматической смены полосы движения.
Определение, завершена ли автоматическая смена полосы движения, в соответствии со следующими условиями:
(a) период времени, затраченный на автоматическую смену полосы движения, превышает параметр времени T планирования поперечной траектории автоматической смены полосы движения;
(b) определение в соответствии с параметром А0 уравнения кубической кривой траектории для поперечного управления, полученным на этапе 4, является ли этот параметр меньшим, чем предельное значение A0Comp, а период времени А0 < A0Comp меньшим, чем предельное значение TComp.
Если условие (а) и условие (b) одновременно удовлетворены, определяется, что автоматическая смена полосы движения завершена, при этом вычисление для планирования кривой пятого порядка и подача команд поперечного управления автоматической смены полосы движения остановлены. Если хотя бы одно из условий (а) или (b) не удовлетворено, процесс возвращается на этап 22.
В другом варианте осуществления настоящего изобретения представлена система планирования поперечной траектории автоматической смены полосы движения автомобиля, содержащая память и контроллер, при этом в памяти хранится машиночитаемая компьютерная программа, а контроллер вызывает машиночитаемую компьютерную программу для выполнения этапов описанного выше способа планирования поперечной траектории автоматической смены полосы движения автомобиля.
В другом варианте осуществления настоящего изобретения дополнительно представлен автомобиль, в котором применена упомянутая выше система планирования поперечной траектории автоматической смены полосы движения автомобиля.
В другом варианте осуществления настоящего изобретения дополнительно представлен носитель данных, на котором хранится машиночитаемая компьютерная программа, которая при вызове контроллером способна выполнять этапы способа планирования поперечной траектории автоматической смены полосы движения упомянутого выше автомобиля.
Исходя из нескольких вариантов осуществления, представленных в настоящей заявке, следует понимать, что раскрытое техническое содержание может быть реализовано и иными способами. Описанные выше варианты осуществления устройства приведены лишь в качестве примеров. Например, разделение элементов может являться разделением логических функций, а при практической реализации могут быть применены другие способы разделения. Так, множество элементов или компонентов могут быть объединены или интегрированы в другую систему, или некоторыми функциями можно пренебречь или не выполнять их. Кроме того, отображаемые или обсуждаемые взаимные связи или прямые связи или коммуникационные соединения могут быть реализованы через различные интерфейсы. Непрямые соединения или коммуникационные соединения между элементами или компонентами могут быть реализованы в электротехнических или иных формах.
Элементы, описанные как отдельные компоненты, могут быть или не быть физически разделены, а отдельные компоненты, отображаемые как элементы, могут быть или не быть физическими элементами, могут быть установлены в одной позиции или распределены по множеству элементов. Часть или все элементы могут быть выбраны в соответствии с фактическими требованиями для достижения целей технических решений вариантов осуществления.
Кроме того, функциональные элементы в вариантах осуществления настоящего изобретения могут быть интегрированы в один процессорный узел, или каждый из элементов может существовать отдельно физически, или по меньшей мере два элемента могут быть интегрированы в один элемент. Интегрированный элемент может быть реализован в виде аппаратных средств, а может быть реализован и в виде программного функционального элемента.
Когда интегрированный элемент реализован в виде программного функционального элемента и продаётся или используется как независимый продукт, такой интегрированный элемент может храниться на машиночитаемом носителе данных. Основываясь на таком понимании, технические решения настоящего изобретения по существу или часть, вносящая вклад в предшествующий уровень техники, или все или часть технических решений могут быть реализованы в форме программного продукта. Компьютерный программный продукт хранится на носителе данных. Программный продукт включает в себя несколько инструкций для указания компьютерному устройству (которое может быть персональным компьютером, сервером, сетевым устройством и т.п.) выполнять все или часть шагов способов, описанных в вариантах осуществления настоящего изобретения. Вышеупомянутый носитель данных включает в себя любой носитель, который может хранить программные коды, такой как флэш-диск USB, постоянное запоминающее устройство (ROM), оперативное запоминающее устройство (RAM), мобильный жёсткий диск, магнитный диск или оптический диск.
Приведенное выше содержание представляет собой примерные варианты осуществления настоящего изобретения. Следует отметить, что специалист в данной области техники может вносить дополнительные улучшения и модификации, не отступая от принципа настоящего изобретения, и эти улучшения и модификации также должны входить в объём защиты настоящего изобретения.
Изобретение относится к области технологии автоматического управления автотранспортным средством и, в частности, к способу и системе планирования поперечной траектории автоматической смены полосы движения автомобиля, к автомобилю и носителю информации. Способ включает этапы обработки информации, расчёта параметров автоматической смены полосы движения, планирования кривой пятого порядка для автоматической смены полосы движения, формирования команды поперечного управления для автоматической смены полосы движения и вычисления решения о завершении автоматической смены полосы движения. Система планирования поперечной траектории автоматической смены полосы движения автомобиля содержит память и контроллер, при этом память хранит машиночитаемую программу, а контроллер вызывает машиночитаемую программу. Автотранспортное средство выполнено с возможностью применения системы планирования поперечной траектории автоматической смены полосы движения. Носитель данных, на котором хранится машиночитаемая компьютерная программа, при вызове которой контроллером могут быть выполнены этапы способа планирования поперечной траектории. Достигается повышение вычислительной эффективности при планировании траектории. 4 н. и 6 з.п. ф-лы, 1 ил.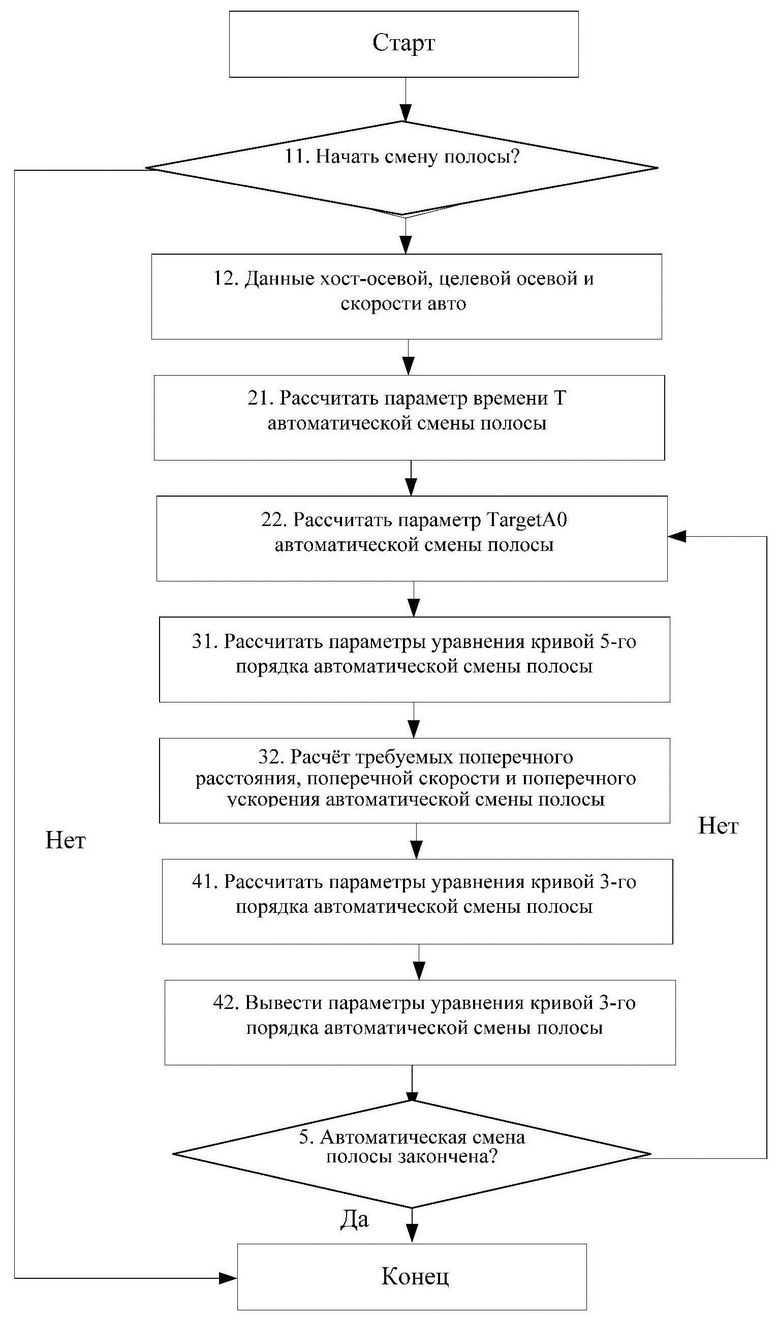
1. Способ планирования поперечной траектории автоматической смены полосы движения автомобиля, включающий следующие этапы:
(1) обработка информации:
получение данных инструкции в отношении автоматической смены полосы движения, выводимых системой принятия решений, и определение, следует ли начинать автоматическую смену полосы движения, при этом в случае определения начала автоматической смены полосы движения выполняется приём данных об осевой линии полосы движения хост-автомобиля, осевой линии целевой полосы движения и скорости V хост-автомобиля, выводимых системой датчиков в реальном времени, а в случае не определения начала автоматической смены полосы движения - завершение процесса;
(2) расчёт параметров автоматической смены полосы движения:
в начальный момент времени автоматической смены полосы движения выполняется вычисление относительного поперечного расстояния TargetA0 между осевой линией целевой полосы и осевой линией полосы движения хост-автомобиля, а также вычисление параметра времени Т, используемого для построения поперечной траектории автоматической смены полосы в сочетании с калибровочной переменной, указывающей скорость процесса смены полосы;
(3) построение кривой пятого порядка для автоматической смены полосы:
в каждый момент времени автоматической смены полосы выполняется вычисление параметров N0, N1, N2, N3, N4, N5 уравнения кривой пятого порядка в соответствии с относительным поперечным расстоянием TargetA0 между осевой целевой полосы и осевой полосы хост-автомобиля, а также параметра времени T, используемого для планирования поперечного отклонения при автоматической смене полосы, а также вычисление требуемого поперечного расстояния Starget, требуемой поперечной скорости Vtarget и требуемого поперечного ускорения Atarget в момент времени t;
(4) выработка инструкции поперечного управления для автоматической смены полосы движения:
расчёт параметров A0lc, A1lc, A2lc, A3lc уравнения кубической кривой траектории изменения полосы движения в момент времени t в соответствии с требуемым поперечным расстоянием Starget, требуемой поперечной скоростью Vtarget и требуемым поперечным ускорением Atarget и в сочетании с параметрами A0lk, A1lk, A2lk, A3lk уравнения кубической кривой осевой линии полосы движения хост-автомобиля, расчёт параметров A0, A1, A2, A3 уравнения кубической кривой траектории для поперечного управления и вывод параметров A0, A1, A2, A3 уравнения кубической кривой траектории на контроллер поперечного управления для выполнения поперечного управления при автоматической смене полосы движения;
(5) расчёт завершения автоматической смены полосы движения:
при одновременном удовлетворении двух следующих условий считается, что автоматическая смена полосы движения завершена:
(a) период времени, используемый для автоматической смены полосы движения, больше параметра времени T построения поперечной траектории автоматической смены полосы движения;
(b) параметр A0 кубического уравнения траектории, используемый для поперечного управления, меньше предельного значения A0Comp, а период времени A0 < A0Comp меньше предельного значения TComp;
после завершения автоматической смены полосы движения вычисление кривой пятого порядка процедуры планирования и выработку инструкции поперечного управления автоматической сменой полосы останавливают; если же автоматическая смена полосы не завершена, процесс возвращается к этапу (3).
2. Способ по п. 1, характеризующийся тем, что на этапе (1) осевая линия полосы движения хост-автомобиля выражается аппроксимацией кубической кривой с получением
ylk = A0lk + A1lk x + A2lkx2 + A3lkx3,
где ylk - поперечное расстояние, x - продольное расстояние, а A0lk, A1lk, A2lk и A3lk - параметры уравнения кубической кривой осевой линии полосы движения хост-автомобиля; осевая целевой полосы движения выражается аппроксимацией кубической кривой с получением
ylt = A0lt + A1ltx + A2ltx2 + A3ltx3,
где ylt - поперечное расстояние, x - продольное расстояние, а A0lt, A1lt, A2lt и A3lt - параметры уравнения кубической кривой осевой линии целевой полосы движения автомобиля.
3. Способ по п. 2, характеризующийся тем, что на этапе (2) формула расчёта параметра времени T для планирования поперечной траектории автоматической смены полосы движения автомобиля имеет следующий вид:

 ;
;
формула расчёта относительного поперечного расстояния TargetA0 между осевой линией целевой полосы и осевой линией полосы хост-автомобиля: TargetA0 = A0lt - A0lk.
4. Способ по п. 3, характеризующийся тем, что на этапе (3) расчёт параметров N0, N1, N2, N3, N4, N5 уравнения кривой пятого порядка выполняется путём:
построения матрицы 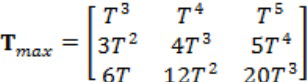 ;
;
построения матрицы  ;
;
где Vi - поперечная скорость в начале автоматической смены полосы, aj - поперечное ускорение в начале автоматической смены полосы, Vf - поперечная составляющая скорости в конце автоматической смены полосы, и af - поперечное ускорение в конце автоматической смены полосы;
решения матричного уравнения:

с получением c(1), c(2), c(3) и последующим получением параметра  уравнения кривой пятого порядка.
уравнения кривой пятого порядка.
5. Способ по п. 4, характеризующийся тем, что на этапе (3)
требуемое поперечное расстояние Starget= N0+N1t+N2t2+N3t3+N4t4+N5t5;
требуемая поперечная скорость Vtarget = N1+2N2t+3N3t2+4N4t3+5N5t4; и
требуемое поперечное ускорение Atarget = 2N2+6N3t+12N4t2+20N5t3.
6. Способ по п. 5, характеризующийся тем, что на этапе (4)
A0lc = Starget; A1lc = Vtarget /V; A2lc = Atarget /(2*V2); A3lc = 0.
7. Способ по пп. 3-6, характеризующийся тем, что на этапе (4) [A0, A1, A2, A3] = [A0lc+A0lk, A1lc+A1lk, A2lc+A2lk, A3lc+A3lk].
8. Система планирования поперечной траектории автоматической смены полосы движения автомобиля, содержащая память и контроллер, при этом память хранит машиночитаемую программу, а контроллер вызывает машиночитаемую программу для выполнения этапов способа планирования поперечной траектории автоматической смены полосы движения автомобиля, как заявлено по любому из пп. 1-7.
9. Автотранспортное средство, выполненное с возможностью применения системы планирования поперечной траектории автоматической смены полосы движения по п. 8.
10. Носитель данных, на котором хранится машиночитаемая компьютерная программа, при вызове которой контроллером могут быть выполнены этапы способа планирования поперечной траектории автоматической смены полосы движения автомобиля по любому из пп. 1-7.
| CN 108519773 B, 14.01.2020 | |||
| CN 106926844 B, 19.10.2018 | |||
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ И УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ | 2015 |
|
RU2693420C1 |
| US 20180297638 A1, 11.04.2018. | |||

