Изобретение касается вспомогательного оборудования пилотируемых и беспилотных летательных аппаратов и способов увеличения беспосадочной дальности действия аэродинамических систем.
Известен способ передачи жидкого топлива с одного летательного аппарата на другой в полете путем установления между летательными аппаратами непосредственного механического контакта посредством гибкого или жесткого трубопровода, стабилизируемого и направляемого расположенными на концах трубопровода аэродинамическими элементами в виде конуса или рулей (см. например: Википедия «Дозаправка в воздухе»).
Такой способ дозаправки имеет следующие недостатки:
1. Опасность повреждения летательного аппарата концом трубопровода.
2. Сильная зависимость позиционирования трубопровода от турбулентности атмосферы.
3. Необходимость точного выдерживания дистанции между летательными аппаратами.
4. Большие затраты времени на установление физического контакта между летательными аппаратами.
5. Конструктивная сложность и громоздкость применяемых приспособлений.
6. Сложность автоматизации процесса дозаправки в беспилотном варианте.
Цель изобретения состоит в устранении вышеперечисленных недостатков способа дозаправки летательных аппаратов в воздухе.
Предлагается способ дозаправки летательного аппарата в воздухе, состоящий в том, что заправляющий летательный аппарат с помощью сопла формирует направленную высокоскоростную струю жидкого топлива, которую ориентируют путем управления угловой ориентацией сопла в режиме обратной связи таким образом, чтобы струя попадала в топливоприемное отверстие в поверхности заправляемого летательного аппарата, открываемое на время дозаправки. При этом диаметр топливоприемного отверстия должен быть больше диаметра струи с учетом ее турбулизационного расширения. Необходимо также учесть динамические погрешности управления ориентацией струи. В первый момент подачи струи почти неизбежны промахи, обусловленные неточностью априорного наведения сопла. Для уменьшения этого промаха следует использовать информацию о параметрах полета, взаимного расположения летательных аппаратов и о состоянии атмосферы. Задача здесь аналогична задаче наведения артиллерийского орудия. Однако промахи жидкой струи при этом гораздо менее опасны, чем возможные промахи при стыковке с твердым трубопроводом. Некоторые потери жидкого горючего при этом способе дозаправки неизбежны. Но они относительно невелики и окупаются следующими преимуществами такого способа дозаправки перед известными:
1. Отсутствует опасность катастрофических повреждений дозаправляемого летательного аппарата жидкой струей при грубом нарушении согласованности пилотирования.
2. Многократно увеличивается допуск на точность относительного позиционирования заправляющего и заправляемого летательных аппаратов.
3. Существенно снижается влияние турбулентности воздушных потоков на процесс дозаправки, т.к. жидкая струя имеет небольшую парусность по сравнению с концом заправляющего трубопровода, который принципиально жестко связан с атмосферой с целью его стабилизации или аэродинамического управления его позиционированием.
4. Топливная струя может включаться, как только летательные аппараты сблизились на требуемое расстояние. Т.е. устраняются затраты времени на выравнивание взаимных параметров движения, а также на процесс развертывания и стыковки трубопроводов.
5. Оборудование для дозаправки компактное и не выступает за пределы обводов поверхностей как заправляющего, так и заправляемого летательных аппаратов.
Все это повышает вероятность успешной дозаправки в сложных атмосферных и боевых условиях, делает ее более безопасной, а также, в виду устранения сложной операции механической стыковки элементов, упрощает автоматизацию процесса, что необходимо для применения дозаправки в беспилотных аэродинамических системах.
Изобретение поясняется нижеследующим описанием примеров применения и двумя фигурами.
Фиг. 1 иллюстрирует предлагаемый способ дозаправки на примере самолета с пропеллерной тягой.
Фиг. 2 поясняет механизм увеличения дальности действия аэродинамической системы, состоящей из множества беспилотных летательных аппаратов.
Заправляющий самолет 1 содержит на борту сопло 2, снабженное сервомеханизмами управления по двум углам ориентации сопла - по высоте и по азимуту (не показаны). Сопло 2 расположено в задней нижней части фюзеляжа в специальном отсеке, закрываемом в крейсерском режиме створками (не показаны). Имеется топливный насос 3, вход которого соединен с топливным баком 4, а выход - с соплом 2. Заправляемый самолет 5 содержит на верхней поверхности фюзеляжа топливоприемную полость 6 с большим отверстием 7 также закрываемым в крейсерском полете створками (не показаны). По краям отверстия 7 расположены датчики контроля положения топливной струи (не показаны). Они могут быть выполнены, в частности, в виде упругих чувствительных волосков, отклоняемых струей жидкости. Топливоприемная полость 6 сообщается с топливным баком 8 - напрямую или посредством перекачивающего насоса.
Чтобы начать дозаправку заправляющий самолет 1 должен расположиться несколько выше и впереди заправляемого самолета 5 и сблизиться с ним на предельно допустимое расстояние, определяемое условием непопадания самолета 5 в спутный след самолета 1. При этом можно не добиваться точного выдерживания определенных параметров взаимного расположения и точного равенства скоростей самолетов, и включить подачу струи 9 топлива в первый момент достижения приемлемо малого расстояния между самолетами. При этом следует сориентировать сопло 2 по направлению, определяемому баллистическими расчетами системы автоматического управления соплом, действующей по текущим данным об относительном положении и относительных скоростях двух самолетов, получаемых от специальной системы оптической или радиотехнической локации. В дальнейшем эта система будет корректировать положение сопла 2 по сигналам вышеупомянутых датчиков положения струи относительно топливоприемного отверстия 7 самолета 5. Таким образом, будут оперативно корректироваться возможные рассогласования взаимного положения двух самолетов в процессе дозаправки. При этом допустимы значительные - до десяти метров-изменения взаимного положения самолетов, возникающие в процессе пилотирования в условиях турбулентности и ошибок пилотирования. Если по каким либо причинам не удается на длительное время удерживать взаимное положение самолетов в требуемых границах, то можно быстро выключить струю и включить ее вновь, когда требуемое взаимное положение самолетов будет вновь достигнуто. Т.е. процесс дозаправки может быть с частыми перерывами. При этом увеличиваются потери топлива из за начального промаха. Однако это лучше, чем полная невозможность произвести дозаправку. Взятый для примера самолет с пропеллерной тягой является наиболее сложным в отношении безопасности случаем. Но и он показывает, что задевание струи за винт не приведет к катастрофическим последствиям. Кроме того, все малоразмерные беспилотные летательные аппараты дальнего действия будут, скорее всего, пропеллерными.
Оценку параметров предлагаемого способа дозаправки произведем применительно к пилотируемым самолетам средней массы.
При давлении топлива на входе в сопло 2, составляющим 1 мегапаскаль и плотности топлива 800 кг/м куб., скорость струи на выходе из сопла составит 50 м/сек.=180 км/час. Если полет происходит с такой же скоростью, то топливная струя обтекается вертикально направленной скоростью, равной разности скорости полета и скорости струи. При угле наклона струи к горизонтали 20 градусов эта скорость составит около 16,6 м/сек. Соответствующий скоростной напор, действующий на струю и примерно равный средней плотности аэродинамической силы, действующей на струю, составит на высоте полета 3000 м около 140 паскалей. Если принять среднюю эффективную толщину струи в 5 см, то при плотности струи 800 кг/м куб., плотность массы, воспринимающая указанное аэродинамическое давление составит 40 кг/м кв. Отношение 140 Па/40 кг/м.кв равно поперечному ускорению струи под действием поперечной аэродинамической силы. Оно составит 140/40=3,5 м/сек кв. При принятой скорости струи 50 м/сек соответствующий радиус искривления струи под действием обдувающего ее потока воздуха, равный квадрату скорости струи, поделенному на поперечное ускорение, составит 715 м. Т.е. струя такой скорости останется практически прямолинейной. Более значительным будет искривление струи под действием силы тяжести. Поскольку ускорение силы тяжести равно 10 м/сек кв., т.е. примерно в три раза больше вычисленного выше аэродинамического искривления, то радиус гравитационного искривления струи будет в три раза меньше аэродинамического, причем с другим знаком.
Если же взять в три раза большую скорость полета, т.е. 150 м/сек=540 км/час, то вектор скорости обдува струи набегающим на нее потоком воздуха примет почти горизонтальное направление (вектор Vx на фиг. 1) Однако перпендикулярная к струе составляющая скорости обдува Vn, отвечающая за аэродинамическое давление, при этом будет примерно в 3 раза меньше, т.е. практически такой же, как в предыдущем случае. Следовательно и радиус аэродинамического искривления топливной струи останется столь же большим. В итоге, всегда будет преобладать гравитационное искривление, показанное на фиг. 1 радиусом R.
Рассмотренные примеры показывают, что при расстоянии между самолетами не превышающими несколько десятков метров можно пренебречь аэродинамическим искривлением струи и обеспечить достаточно высокую точность первичного попадания струей в топливоприемное отверстие по баллистическим расчетам. Что касается конфигурации сечения струи на ее протяжении, то она изменяется под действием главным образом турбулентности. Капилярными силами для крупномасштабной струи можно пренебречь. При этом исходная турбулентность, формируемая в сопле, может быть сведена к ничтожной величине укорочением сопла в соответвии с условием: Re меньше 2000 (где Re - критерий Рейнольдса). Вторичная турбулентность формируется по по механизму т.н.з. «затопленной струи» за счет неустойчивости вихревой пелены на границе двух сред с разной скоростью движения (в данном случае граница между жидкостью и быстро движущимся относительно нее воздухом). Аналогичное явление имеет место при генерации волн на воде ветром. Это явление является главным фактором, ограничивающим возможную дальнобойность струи. Практический опыт показывает, что на расстоянии 20 м, приемлемым для безопасного сближения самолетов среднего размера, рассеяние струи не превысит нескольких десятков см, что необходимо для попадания струи в топливоприемное отверстие в фюзеляже.
Скорость перекачки топлива в вышерассмотренном примере составит 50 м/сек * 20 см кв=Q,1 м куб/сек. или 6 м куб./мин.
Соответствующая мощность привода топливного насоса составит около 100 квт. Для самолета средних размеров это вполне приемлемые показатели.
Рассмотрим далее перспективу применения метода дозаправки в построении беспилотных систем дальнего действия, состоящих из множества однотипных летательных аппаратов малого размера весом не более нескольких килограмм (как у птиц) и очень дешевых в производстве. Известно, что дальность полета летательных аппаратов уменьшается с уменьшением их размерности. Однако у некоторых птиц, причем небольших, дальность непрерывного полета без питания достигает 3000 км и более при скорости 100-150 км/час. Есть основания полагать, что исскуственные аэродинамические системы, будучи основаны на более экономичных и легких двигателях, чем мышцы, будут иметь единичную дальность действия не хуже. Дозаправка при этом потребуется для достижения глобальной беспосадочной дальности действия системы (например для преодоления океанов).
Механизм увеличения дальности действия системы проиллюстрирован на фиг. 2. Горизонтальные линии соответствуют расстояниям, преодолеваемым отдельными птицами (в нашем случае это беспилотные летательные аппараты (далее БПЛА) Рассмотрим случай, не предусматривающий возврат аппаратов на базу. Слева стартует восемь БПЛА. Пройдя половину своего максимально возможного расстояния, четыре БПЛА отдают весь остаток своего топлива четырем другим аппаратам. После этого, дозаправленные аппараты смогут пройти еще такое расстояние. Далее процесс повторяется, но уже с уменьшенным в два раза числом аппаратов. Максимальная дальность действия системы определиться, когда в процессе указанного многостадийного уменьшения числа аппаратов в два раза останется единственный аппарат, который достигнет предельно возможного расстояния. Отсюда ясно, что кратность увеличения дальности действия системы по сравнению с дальностью полета одного БПЛА равна логарифму числа летательных аппаратов в системе по основанию два. Ситуация напоминает формулу Циолковского для предельной скорости многоступенчатой ракеты.
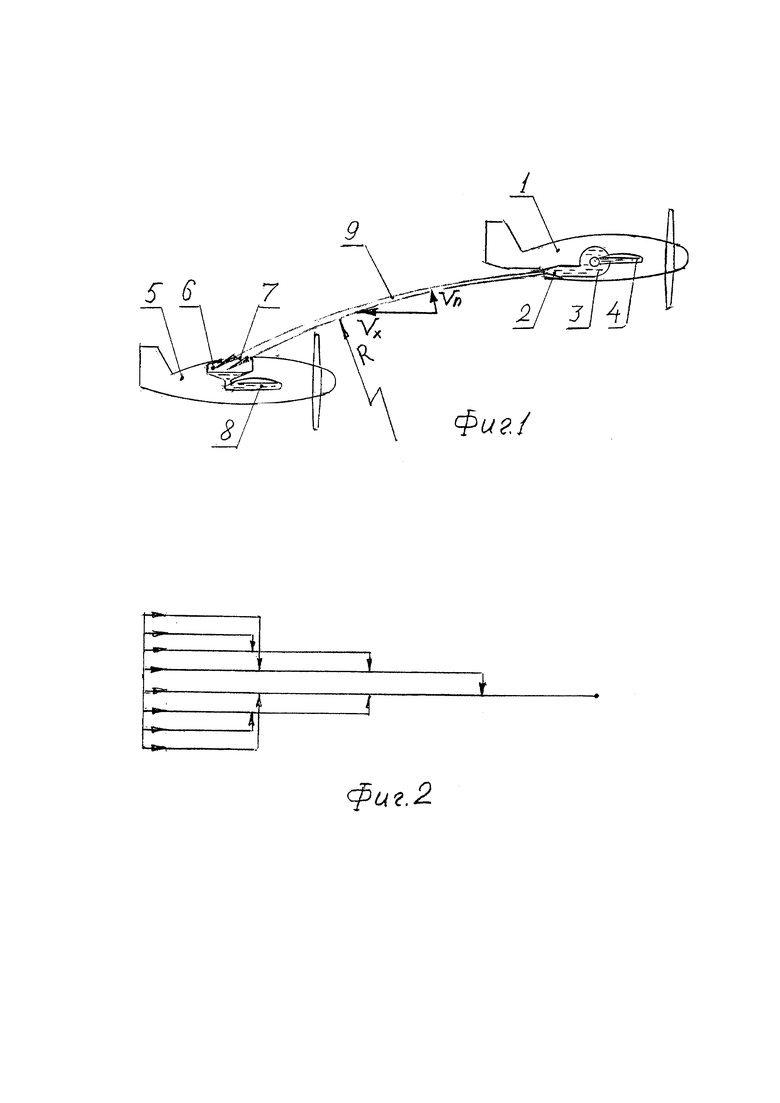
Изобретение относится к дозаправке летательных аппаратов в воздухе. Способ дозаправки летательного аппарата в воздухе заключается в максимально возможном сближении заправляющего (1) и заправляемого (5) летательных аппаратов. Заправляющий летательный аппарат (1) с помощью сопла (2) формирует направленную струю (9) жидкого топлива, которую ориентируют путем управления угловой ориентацией сопла в режиме обратной связи таким образом, чтобы струя (9) попадала в топливоприемное отверстие (7) в поверхности заправляемого летательного аппарата (5), открываемое на время дозаправки. Достигается сокращение времени дозаправки. 2 ил.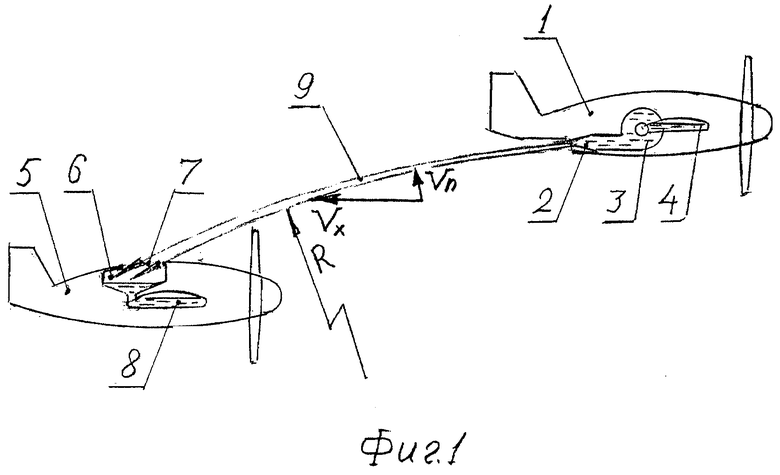
Способ дозаправки летательного аппарата в воздухе, состоящий в максимально возможном сближении заправляющего и заправляемого летательных аппаратов, отличающийся тем, что заправляющий летательный аппарат с помощью сопла формирует направленную струю жидкого топлива, которую ориентируют путем управления угловой ориентацией сопла в режиме обратной связи таким образом, чтобы струя попадала в топливоприемное отверстие в поверхности заправляемого летательного аппарата, открываемое на время дозаправки.
| СИСТЕМА ЗАПРАВКИ САМОЛЕТА ТОПЛИВОМ В ПОЛЕТЕ | 1996 |
|
RU2104229C1 |
| SU 1728087 A1, 23.04.1992 | |||
| Прибор для контроля шпоночных пазов на валах | 1980 |
|
SU934194A1 |
| Способ изготовления отводов | 1978 |
|
SU740334A1 |

