Родственные заявки
Настоящая заявка испрашивает приоритет по предварительной заявке США на выдачу патента № 62/323,170, поданной 15 апреля 2016 года, содержание которой включено в данный документ посредством ссылки.
Область техники, к которой относится настоящее изобретение
Настоящее изобретение относится к способам и системам, используемым для натяжения транспортера, такого как забойный скребковый транспортер («AFC») или консольный перегружатель («BSL»)
Раскрытие изобретения
В одном варианте осуществления в изобретении предоставлена система натяжения транспортирующего элемента транспортера. Система натяжения содержит клапан с электромагнитным управлением, выполненный с возможностью переключения между открытым состоянием и закрытым состоянием, насос, соединенный с клапаном с электромагнитным управлением, и цилиндр, соединенный с насосом посредством клапана с электромагнитным управлением. Цилиндр содержит выдвигаемый поршень, и выдвигаемый поршень приводят в действие посредством насоса, когда клапан с электромагнитным управлением находится в открытом состоянии. Система натяжения также содержит блокирующую пластину, содержащую первую часть храпового механизма, принимающий брус и переключатель режима. Принимающий брус соединен с цилиндром и соединен с валом транспортера. Принимающий брус содержит вторую часть храпового механизма для зацепления с первой частью храпового механизма блокирующей пластины. Блокирующая пластина прикладывает блокирующие усилие к принимающему брусу. Когда цилиндр двигает принимающий брус в сторону от центральной линии транспортера, принимающий брус преодолевает блокирующие усилие блокирующей пластины, и принимающий брус двигает вал транспортера в направлении вперед в сторону от центральной линии транспортера, когда преодолевает блокирующие усилие блокирующей пластины. Переключатель режима можно переключать между первым состоянием, в котором клапан с электромагнитным управлением приводится в действие в ответ на выходной сигнал от датчика, и вторым состоянием, в котором клапан с электромагнитным управлением приводится в действие в ответ на приведение в действие исполнительного механизма.
В еще одном варианте осуществления в изобретении предоставлена система натяжения транспортера. Система натяжения содержит клапан с электромагнитным управлением, выполненный с возможностью переключения между открытым состоянием и закрытым состоянием, насос, соединенный с клапаном с электромагнитным управлением, и цилиндр, соединенный с насосом посредством клапана с электромагнитным управлением. Цилиндр содержит выдвигаемый поршень, который приводят в действие посредством насоса, когда клапан с электромагнитным управлением находится в открытом состоянии. Система натяжения также содержит блокирующую пластину, содержащую первую часть храпового механизма, принимающий брус, содержащий вторую часть храпового механизма, датчик приближения и электронный процессор. Принимающий брус соединен с цилиндром и соединен с валом транспортера для перемещения транспортирующего элемента. Вторая часть храпового механизма натяжного механизма сцеплена с первой частью храпового механизма блокирующей пластины. Блокирующая пластина прикладывает блокирующие усилие к принимающему брусу. Когда цилиндр двигает принимающий брус в сторону от центральной линии транспортера, принимающий брус преодолевает блокирующие усилие блокирующей пластины, и кроме того при этом принимающий брус двигает вал транспортера в направлении вперед в сторону от центральной линии транспортера, когда преодолевает блокирующие усилие блокирующей пластины. Датчик приближения выполнен с возможностью генерирования выходного сигнала, указывающего, что транспортирующий элемент имеет недостаточное натяжение когда транспортирующий элемент попадает в диапазон обнаружения датчика приближения. Электронный процессор соединен с датчиком приближения и клапаном с электромагнитным управлением. Электронный процессор выполнен с возможностью приема выходного сигнала от датчика приближения и переключения клапана с электромагнитным управлением в открытое состояние в ответ на прием выходного сигнала.
В еще одном варианте осуществления в изобретении предоставлен способ натяжения транспортирующего элемента транспортера. Способ включает генерирование датчиком приближения выходного сигнала, указывающего, что транспортирующий элемент имеет недостаточное натяжение, прием выходного сигнала от датчика приближения и переключение клапана с электромагнитным управлением в открытое состояние в ответ на прием выходного сигнала от датчика приближения. Способ также включает приведение в действие посредством насоса поршня цилиндра, в то время как клапан с электромагнитным управлением находится в открытом состоянии, толкание цилиндром принимающего бруса, содержащего вторую часть храпового механизма, в зацепление с первой частью храпового механизма блокирующей пластины, и прикладывание блокирующей пластиной блокирующего усилия к принимающему брусу. Способ дополнительно включает преодоление блокирующего усилия принимающим брусом и перемещение вала транспортера в сторону от центральной линии транспортера принимающим брусом при преодолении блокирующего усилия.
Другие аспекты изобретения станут очевидны при рассмотрении подробного описания и сопровождающих чертежей.
Краткое описание фигур
На фиг. 1 представлен вид сверху дробилки системы разработки согласно одному варианту осуществления изобретения.
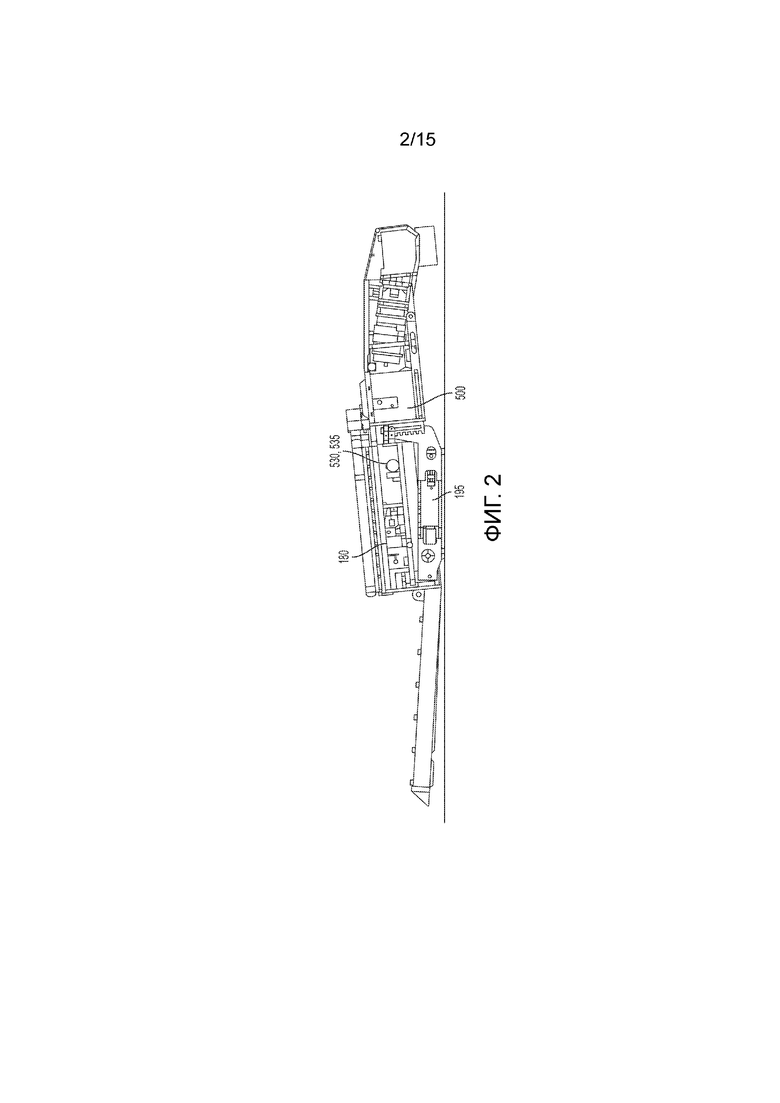
На фиг. 2 представлен вид сбоку дробилки фиг. 1.
На фиг. 3 представлен транспортер системы разработки фиг. 1 с неправильным натяжением.
На фиг. 4 представлен схематичный вид электрической подсистемы системы натяжения транспортера.
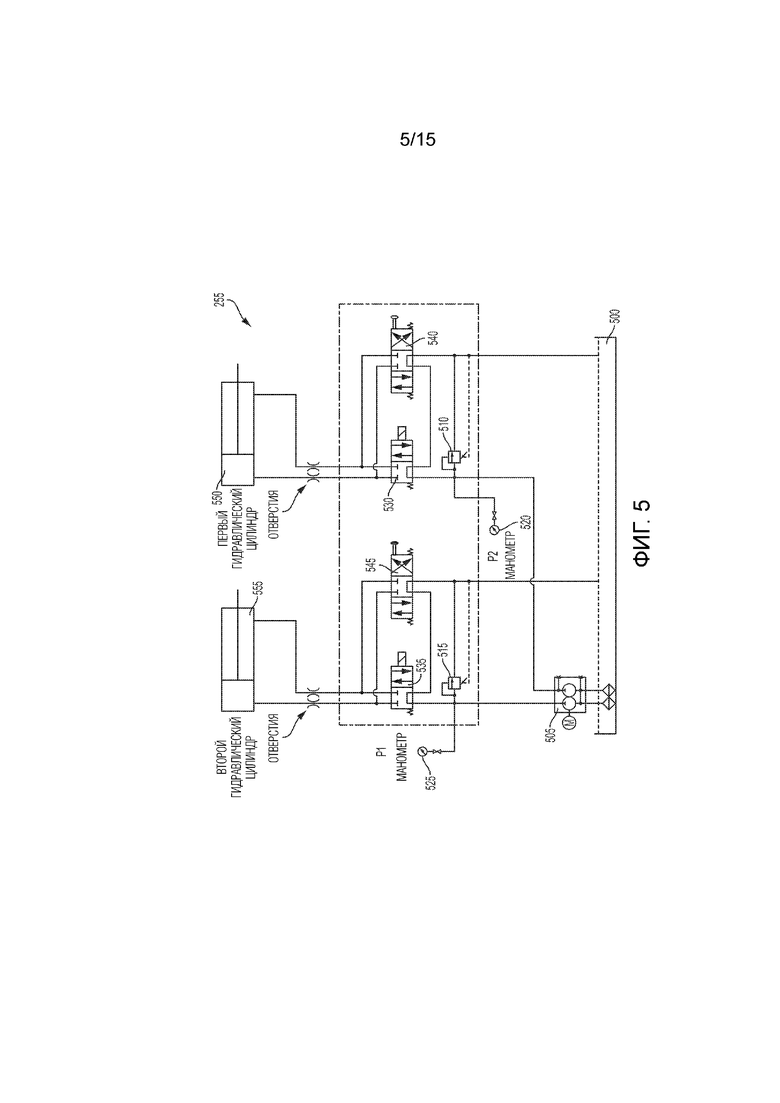
На фиг. 5 представлен схематичный вид гидравлической подсистемы системы натяжения транспортера.
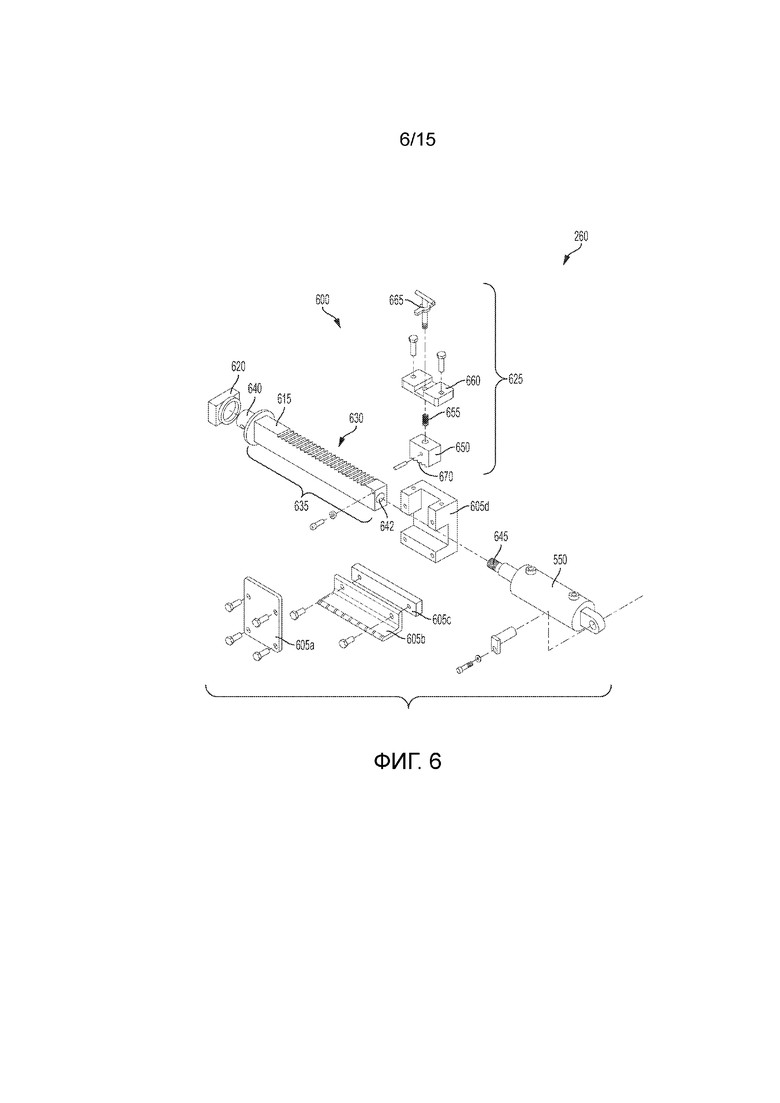
На фиг. 6 представлен вид в разобранном виде механической подсистемы системы натяжения транспортера.
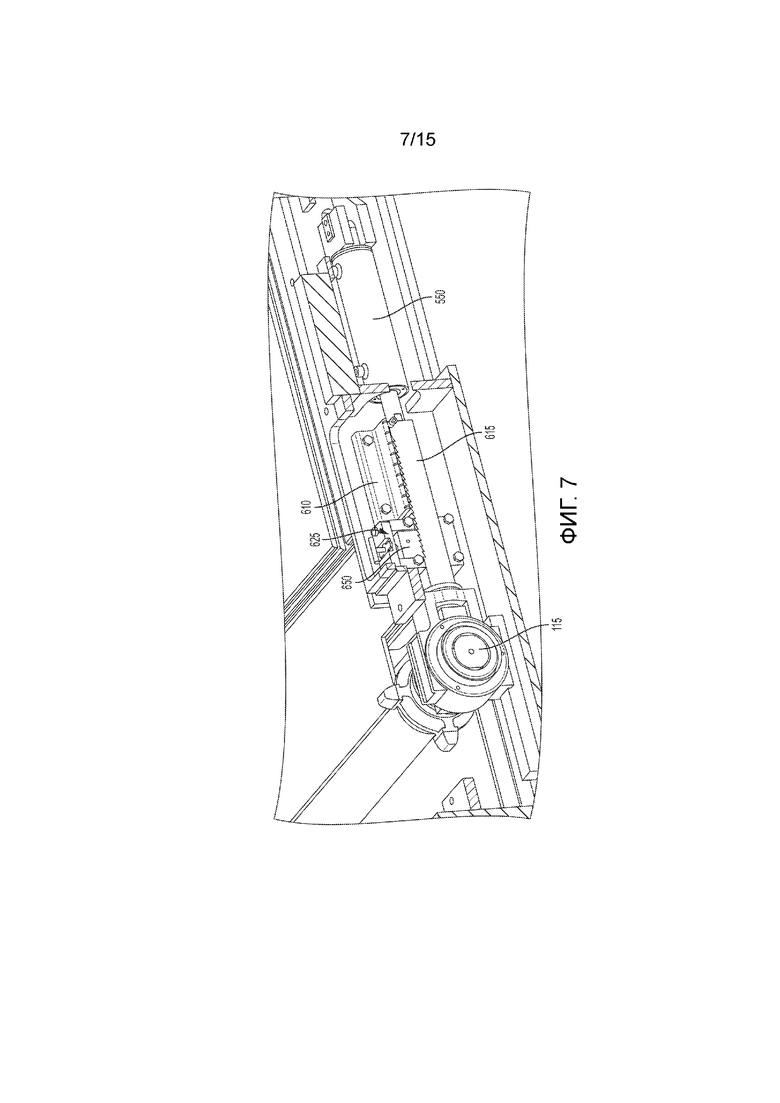
На фиг. 7 представлен общий вид механической подсистемы системы натяжения транспортера.
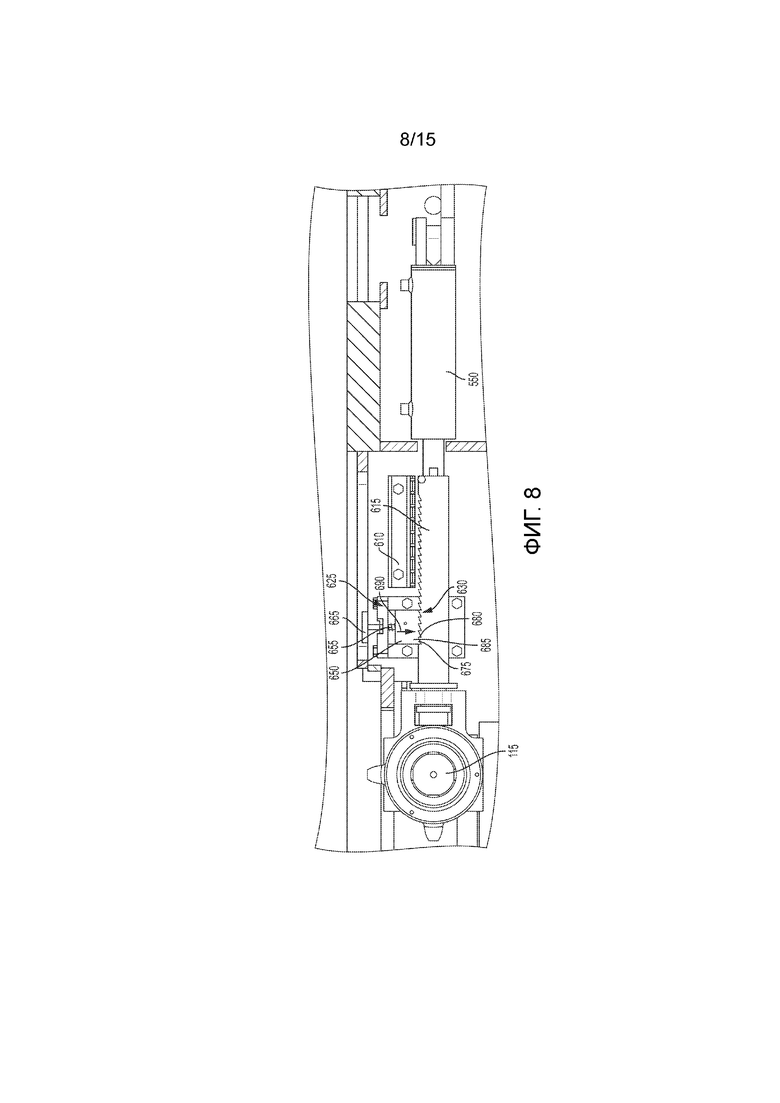
На фиг. 8 представлен вид сбоку механической подсистемы системы натяжения транспортера.
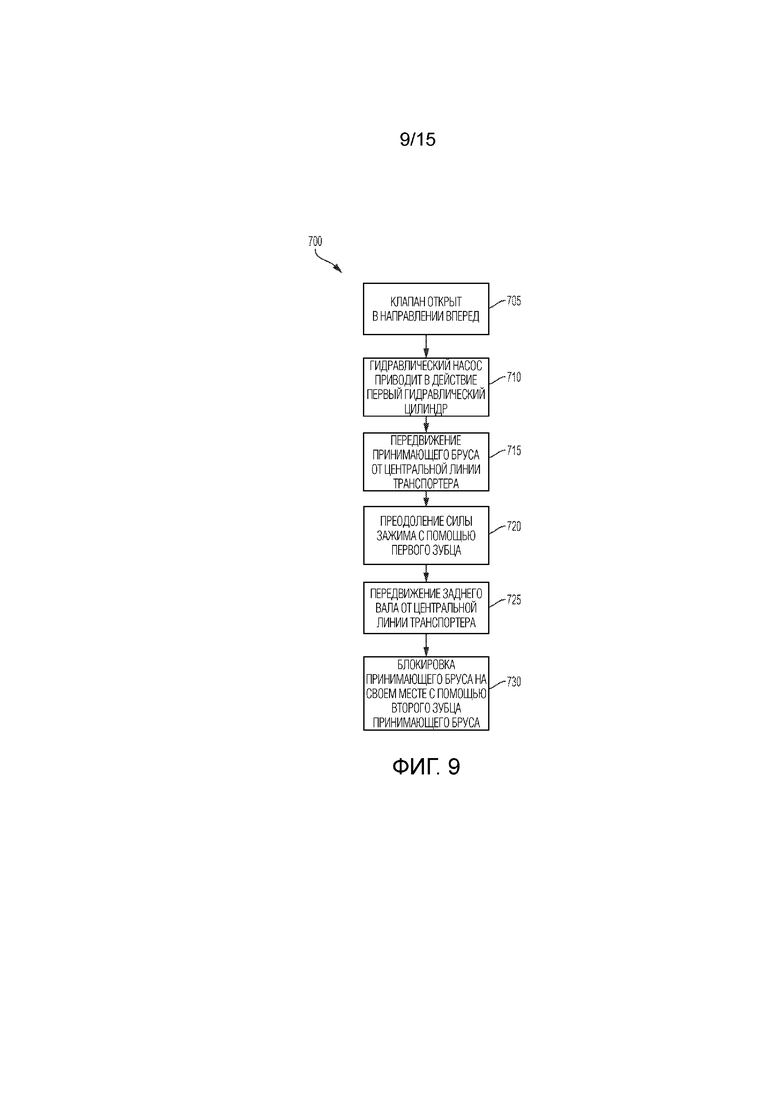
На фиг. 9 представлена блок-схема, иллюстрирующая способ работы механической подсистемы.
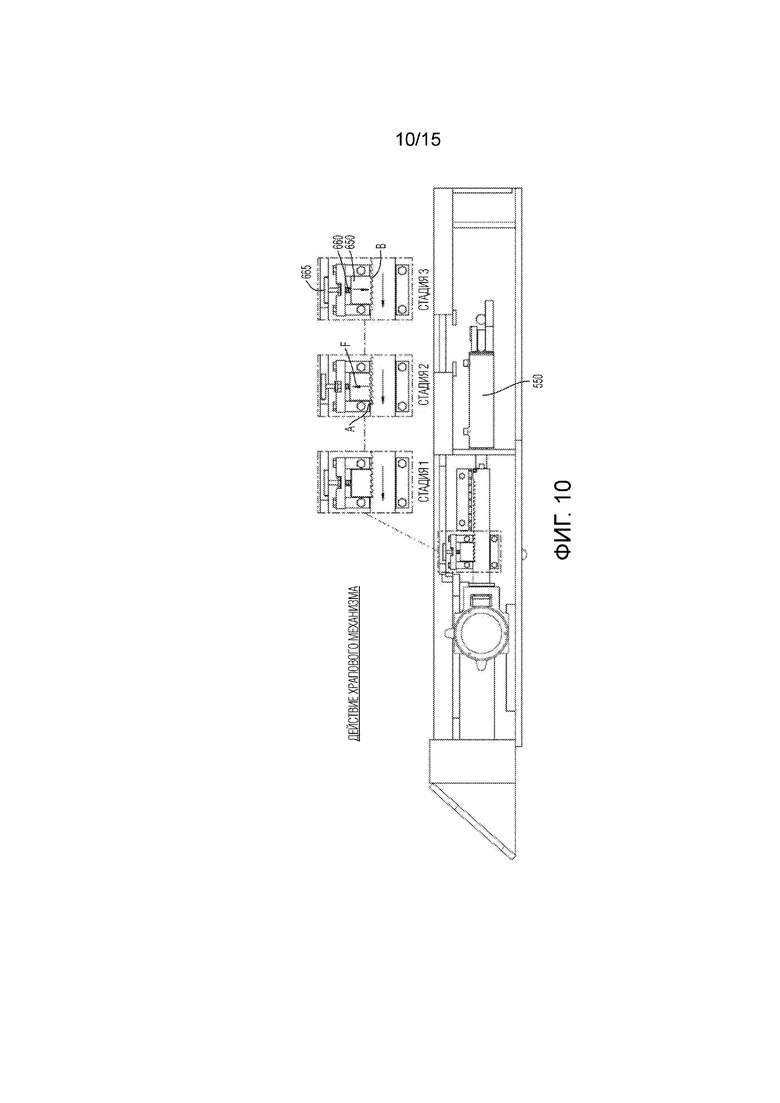
На фиг. 10 представлена схема, иллюстрирующая работу механической подсистемы.
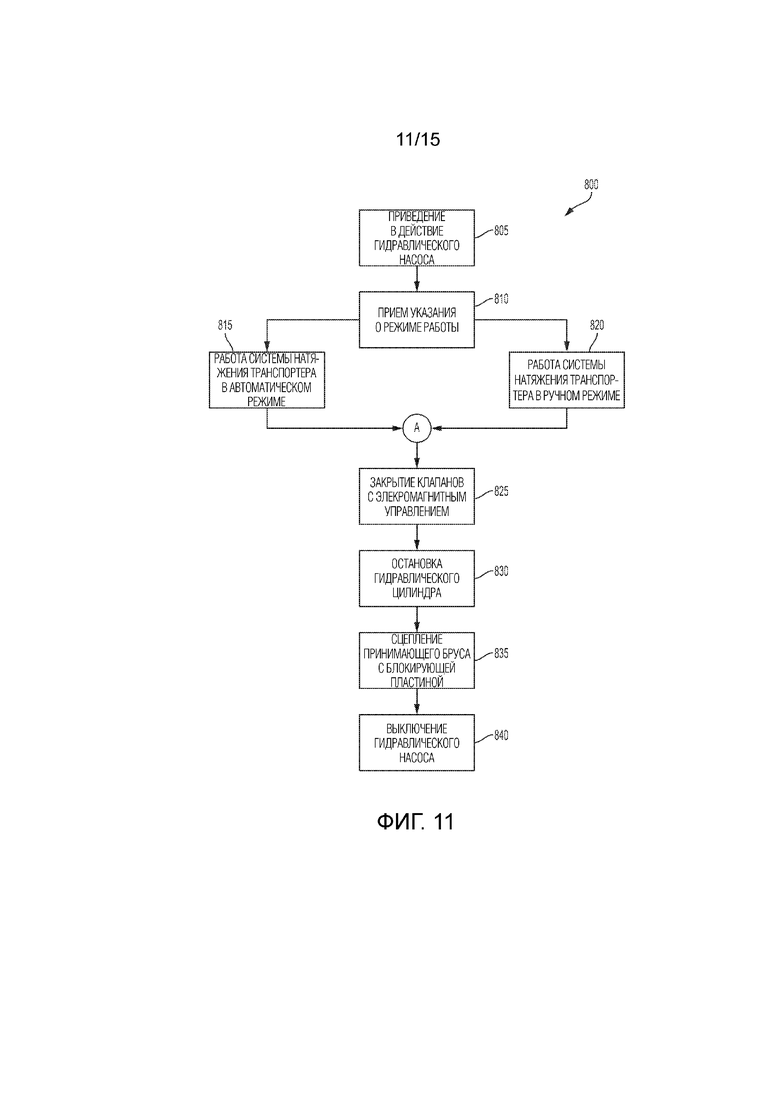
На фиг. 11 представлена блок-схема, иллюстрирующая способ работы системы натяжения транспортера.
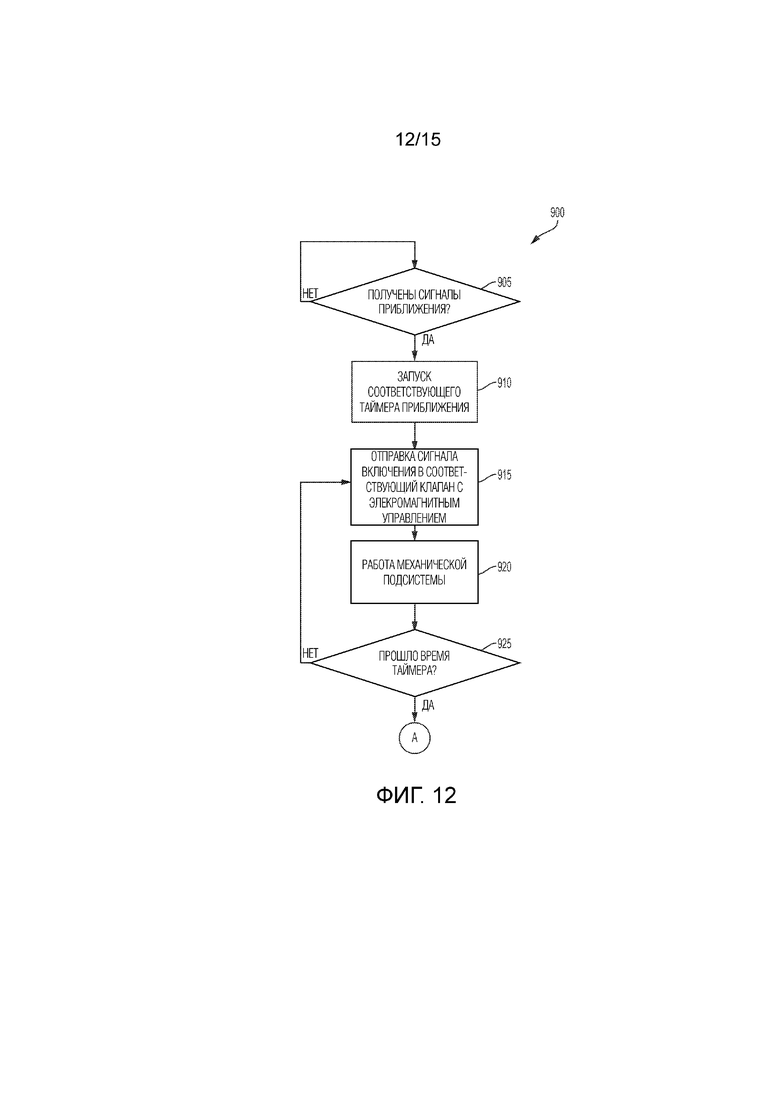
На фиг. 12 представлена блок-схема, иллюстрирующая способ работы системы натяжения транспортера при выборе автоматического режима.
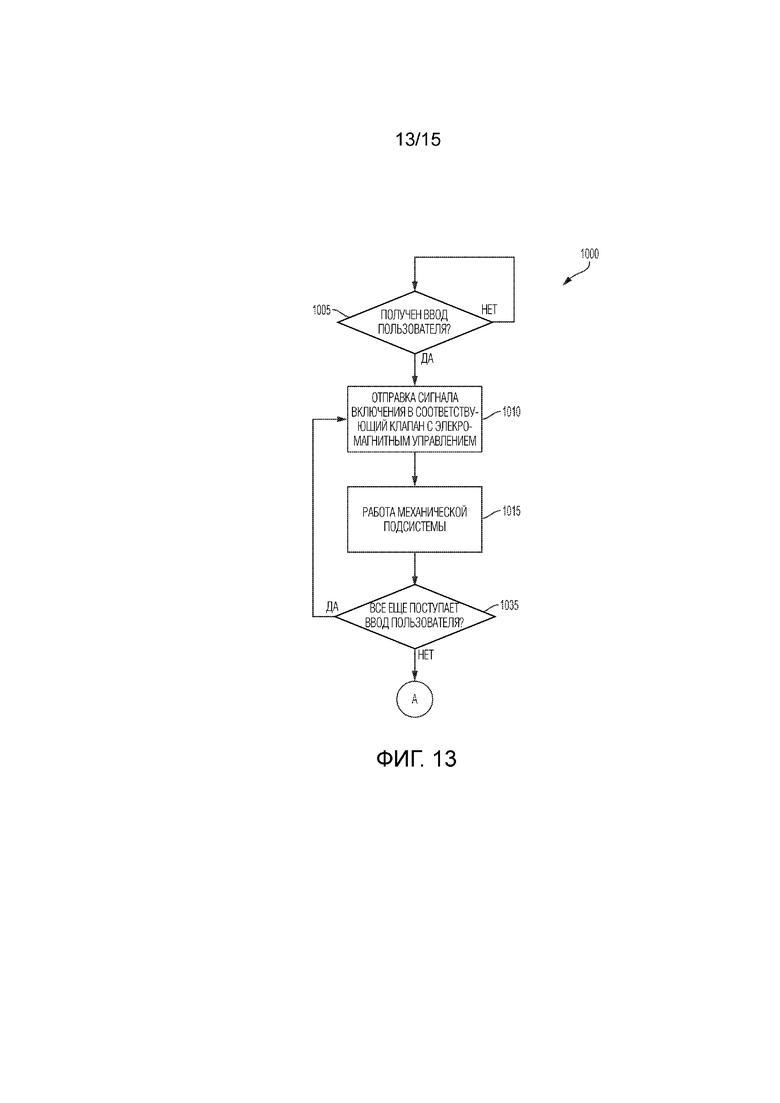
На фиг. 13 представлена блок-схема, иллюстрирующая способ работы системы натяжения транспортера при выборе ручного режима.
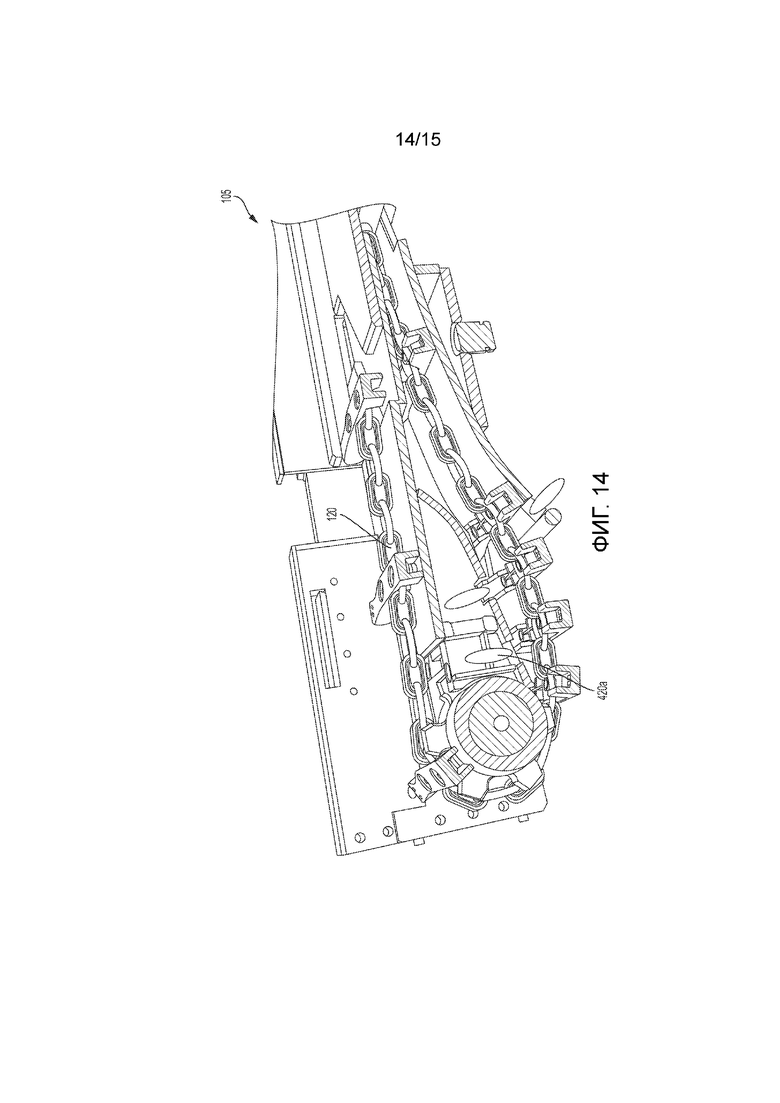
На фиг. 14 представлена схема, иллюстрирующая иллюстративное положение датчика цепи транспортера фиг. 3.
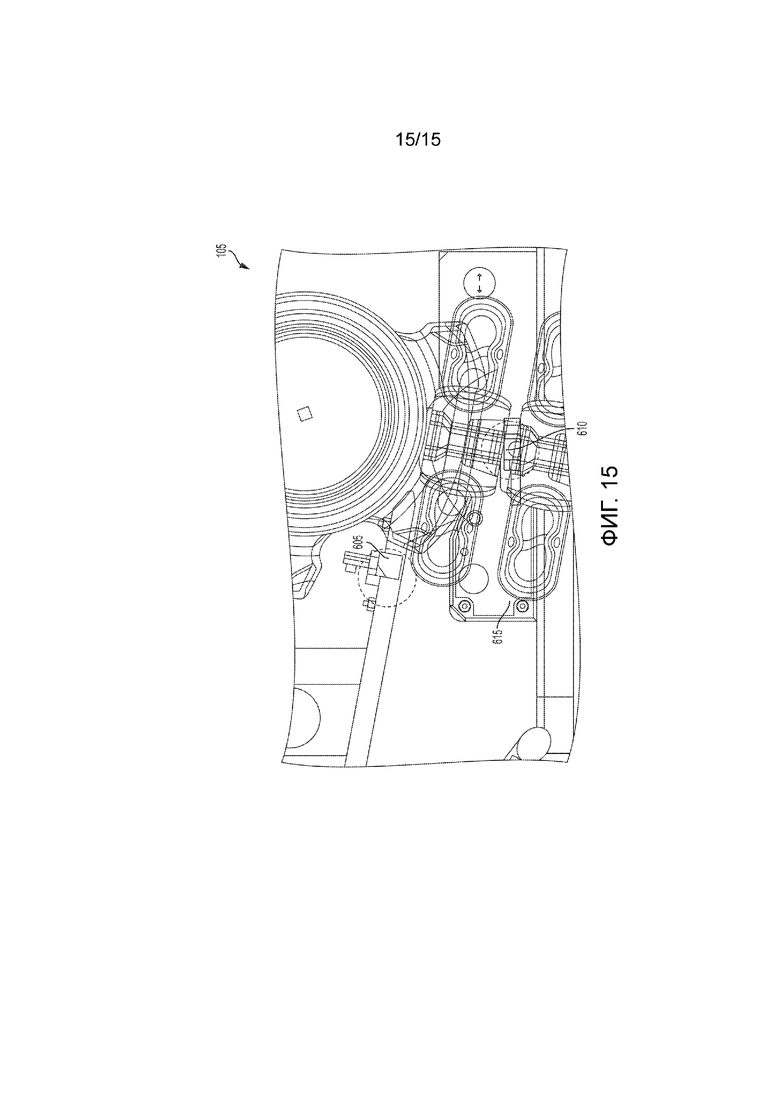
На фиг. 15 представлена схема, иллюстрирующая еще одно иллюстративное положение датчика цепи транспортера фиг. 3.
Перед подробным объяснением любых вариантов осуществления изобретения следует отметить, что применение изобретения не ограничено деталями конфигурации и расположения элементов, изложенными в следующем описании или представленных на сопровождающих чертежах. Изобретение допускает другие варианты осуществления и практическое исполнение или осуществление разными способами. Также, следует понимать, что фразеология и терминология, используемые в данном документе, предназначены для цели описания и не должны рассматриваться в качестве ограничения. Использование в данном документе «включающий», «содержащий» или «имеющий» и их вариантов предназначено охватывать перечисленные далее пункты и их эквиваленты, а также дополнительные пункты. Если не оговорено или не ограничено иное, термины «установленный», «соединенный», «поддержанный» и «связанный» и их варианты используются в широком смысле и охватывают как прямые, так и непрямые крепления, связи, опоры и соединения.
Кроме того, следует понимать, что в вариантах осуществления изобретения могут иметься аппаратные средства, программное обеспечение и электронные элементы или модули, которые для целей обсуждения могут быть проиллюстрированы и описаны, как если бы большая часть элементов была выполнена исключительно в виде аппаратных средств. Однако, рядовой специалист в данной области и на основании прочтения этого подробного описания должен признать, что по меньшей мере в одном варианте осуществления электронные аспекты изобретения могут быть выполнены в виде программного обеспечения (например, храниться на энергонезависимом машиночитаемом носителе), выполняемого одним или более блоками обработки, такими как микропроцессор и/или специализированные интегральные схемы («ASICs»). В связи с этим следует заметить, что для осуществления изобретения может быть использовано множество устройств на основе аппаратных средств и программного обеспечения, а также множество разных конструктивных элементов. Например, «серверы» и «вычислительные устройства», описанные в описании, могут содержать один или более блоков обработки, один или более модулей машиночитаемых носителей, один или более интерфейсов ввода/вывода и различные соединения (например, шину системы), соединяющие компоненты.
Описание предпочтительных вариантов осуществления изобретения
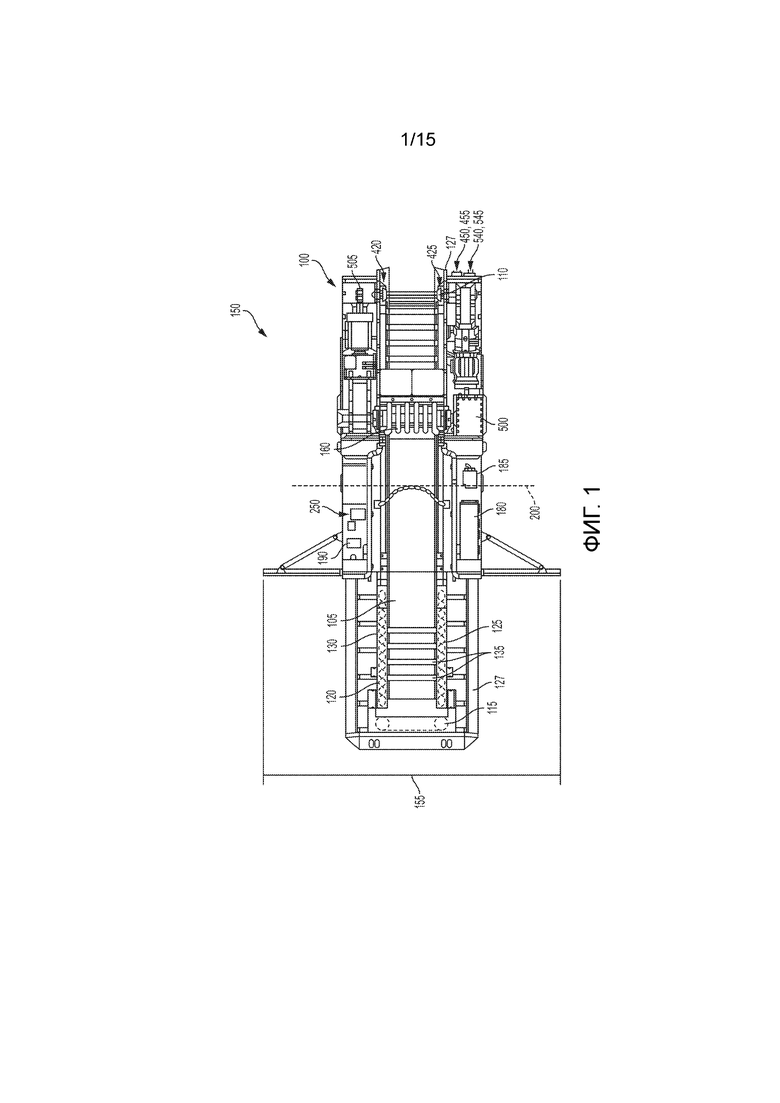
На фиг. 1 представлена транспортирующая система 100, используемая для транспортировки добываемого материала. Как показано на фиг. 1, транспортирующая система 100 содержит транспортер 105, два ведущих вала (т.е. передний вал 110 и задний вал 115 (показанный пунктиром)), первую цепь 120 (показанную пунктиром) и вторую цепь 125 (показанную пунктиром). Как показано на фиг. 1, передний вал 110 и задний вал 115 опираются на раму 127 и расположены на противоположных концах транспортера 105. Задний вал 115 расположен на впускном конце дробилки 150 и действует как холостой. Первая цепь 120 и вторая цепь 125 (например, элементы транспортера) расположены вокруг переднего вала 110 и заднего вала 115, образуя транспортер 105. Как показано на фиг. 1, первая цепь 120 расположена вокруг первого конца переднего вала 110 и вокруг первого конца заднего вала 115 (например, правого конца переднего вала 110 и заднего вала 115). Вторая цепь 125 расположена вокруг второго конца переднего вала 110 и вокруг второго конца заднего вала 115 (например, левого конца переднего вала 110 и заднего вала 115). Цепи 120,125 приходят в движение от одного или более механизмов привода (например, от двигателей), и движение цепей 120, 125 вокруг переднего вала 110 и заднего вала 115 заставляет транспортер 105 перемещать добываемый материал. В проиллюстрированном варианте осуществления первая цепь 120 отличается (например, иного типа или иного размера) от второй цепи 125. В проиллюстрированном варианте осуществления транспортер 105 также содержит кожухи 130 цепи и поперечины 135 транспортера, соединяющие цепи 120, 125 транспортера.
В проиллюстрированном варианте осуществления транспортирующая система 100 является частью мобильной дробилки 150. Дробилка 150 содержит бункер 155 для предоставления добываемого материала в транспортер 105. Транспортер 105 транспортирует добываемый материал в дробильный механизм 160, где по меньшей мере некоторая часть добываемого материала дробится с достижением намеченного размера. Как показано на фиг. 1 и 2, дробилка 150 также содержит пусковое устройство 180, регулирующие клапаны 185 и другие регулирующие элементы 190 для управления дробилкой 150. Для подвижности дробилка 150 установлена на двух гусеницах 195 (только одна из которых показана на фиг. 2). В других вариантах осуществления гусеницы 195 можно заменить колесами, подходящими для обеспечения подвижности в условиях добычи. Кроме того, транспортирующая система 100 может быть частью разных добычных машин, таких как, например, забойный скребковый транспортер.
Для транспортирующей системы 100 для эффективного перемещения добываемого материала из первого места во второе место, цепи 120, 125 транспортера 105 имеют правильное натяжение. Правильное натяжение транспортера достигается за счет регулировки положения заднего вала 115 относительно переднего вала 110. Когда задний вал 115 и/или передний вал 110 располагают дальше друг от друга (например, дальше от центральной линии 200 транспортера на фиг. 1), транспортер 105 имеет более высокое натяжение (т.е. натянут больше). Когда задний вал 115 и передний вал 110 располагают ближе друг к другу (например, ближе к центральной линии 200 транспортера), транспортер 105 имеет меньшее натяжение (т.е. натянут меньше).
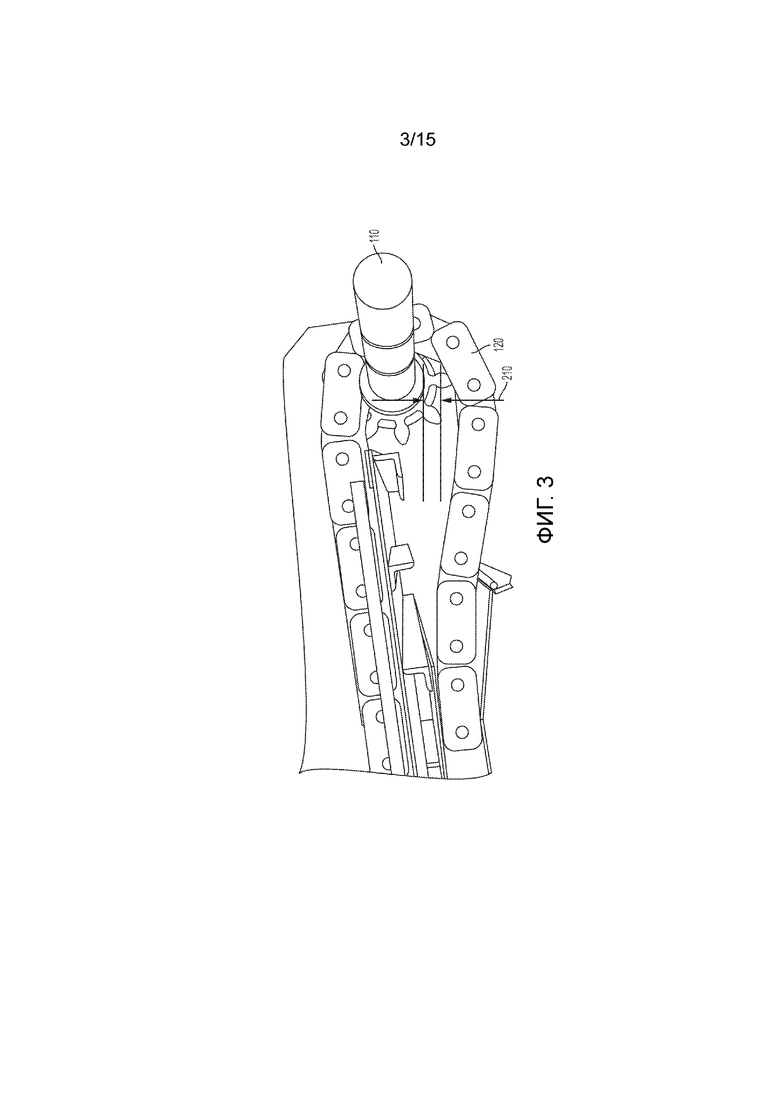
На фиг. 3 представлен пример цепи 120 с неправильным натяжением. Цепи 120, 125 транспортера имеют правильное натяжение, когда расстояние 210 провисания между передним валом 110 и цепями 120, 125 транспортера находится в пределах заданного диапазона расстояний. Расстояние 210 провисания видно сзади переднего вала 110 и соответствует расстоянию между самой нижней частью цепей 120, 125 транспортера в зоне разгрузки транспортера 105 (например, в зоне, занятой цепями после того, как цепь обертывают вокруг переднего вала 110). В проиллюстрированном варианте осуществления заданный диапазон расстояний для расстояния 210 провисания находится между приблизительно 15 миллиметров (мм) и приблизительно 50 мм. Расстояние 210 провисания меньше чем, например, 15 мм означает, что транспортер 105 имеет избыточное натяжение, а расстояние 210 провисания более чем 50 мм означает, что транспортер 105 имеет недостаточное натяжение. В других вариантах осуществления, однако, заданный диапазон расстояний может быть иным на основании, например, длины транспортера и/или массы материала, транспортируемого транспортером. На фиг. 3, однако, представлено расстояние 210 провисания между передним валом 110 и первой цепью 120, которое превышает заданный диапазон расстояний. В примере фиг. 3 расстояние 210 провисания составляет приблизительно 55 мм. Когда цепи 120, 125 имеют недостаточное натяжение, расстояние 210 провисания также можно называть «провисание» цепи 120, 125.
Транспортирующая система 100 содержит систему натяжения транспортера для автоматического отодвигания переднего вала 110 и/или заднего вала 115 друг от друга для правильного натяжения транспортера 105. Система натяжения транспортера содержит электронную подсистему 250 (фиг. 4), гидравлическую подсистему 255 (фиг. 5) и механическую подсистему 260 (фиг. 6-8). Электронная подсистема 250 принимает сигналы от исполнительных механизмов и датчиков и на основании принятых сигналов посылает сигналы приведения в действие гидравлической подсистемы 255. Электронная подсистема 250 включает гидравлическую подсистему 255, которая двигает механическую подсистему 260. механическая подсистема 260 двигает (например, толкает) один из ведущих валов 110, 115 транспортера 105 в направлении или в сторону от центральной линии 200 транспортера 105 для натяжения транспортера 105, пока транспортер 105 не будет иметь правильное натяжение.
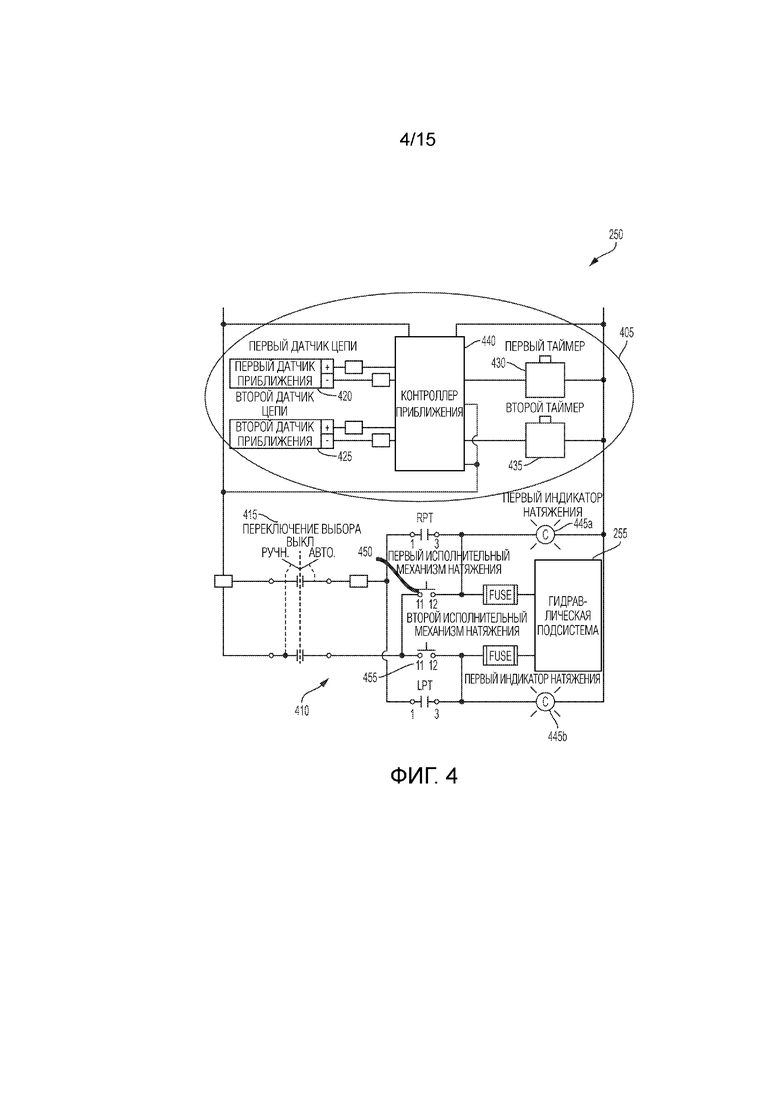
На фиг. 4 представлен схематичный вид электронной подсистемы 250 системы натяжения транспортера. Как показано на фиг. 4, электронная подсистема 250 содержит схему 405 автоматического управления, схему 410 ручного управления и переключатель 415 режима. Как схема 405 автоматического управления, так и схема 410 ручного управления соединены с гидравлической подсистемой 255 для включения и управления гидравлической подсистемой 255. Переключатель 415 режима соединен со схемой 405 автоматического управления и схемой 410 ручного управления. Переключатель 415 режима получает указание от пользователя (например, от оператора системы разработки) о требуемом режиме работы системы натяжения транспортера. В проиллюстрированном варианте осуществления переключатель 415 режима содержит переключатель, который можно переключать (например, передвигать) между тремя положениями. Когда переключатель 415 режима находится в первом состоянии (например, в первом положении), система натяжения транспортера работает в ручном режиме. Когда переключатель 415 режима находится во втором состоянии (например, во втором положении), система натяжения транспортера работает в автоматическом режиме, а когда переключатель 415 режима находится в третьем состоянии (например, в третьем положении), система натяжения транспортера деактивирована (т.е. выключена). Затем переключатель 415 режима сообщается со схемой 405 автоматического управления и со схемой 410 ручного управления относительно выбранного режима работы. Переключатель 415 режима может представлять собой, например, поворотный переключатель, способный перемещаться между тремя положениями. В некоторых вариантах осуществления переключатель 415 режима не способен перемещаться между тремя положениями, но вместо этого переключатель 415 режима содержит множество переключателей или исполнительных механизмов для указания выбранного режима работы.
Схема 405 автоматического управления содержит датчик 420 первой цепи, датчик 425 второй цепи, первый таймер 430 приближения, второй таймер 435 приближения и электронный процессор 440. Снова со ссылкой на фиг. 1 датчик 420 первой цепи и датчик 425 второй цепи расположены на раме 127 транспортера 105 около переднего вала 110. Датчики 420, 425 первой и второй цепей генерируют первый и второй выходной сигнал, соответственно, когда соответствующая (например, первая и вторая) цепь 120, 125 определяется датчиками 420, 425 первой и второй цепей, соответственно, в то время как соответствующая цепь 120, 125 находится в пределах заданного расстояния (например, в пределах диапазона обнаружения) первого и второго датчиков 420, 425 цепей. В частности, датчик 420 первой цепи генерирует первый сигнал приближения, соответствующий тому, находится ли первая цепь 120 в пределах заданного расстояния от датчика 420 первой цепи. Датчик 425 второй цепи генерирует второй сигнал приближения, соответствующий тому, находится ли вторая цепь 125 в пределах заданного расстояния от второго конца переднего вала 110. В проиллюстрированном варианте осуществления датчики 420, 425 первой и второй цепей помещают достаточно низко на раме 127 таким образом, чтобы первый и второй выходные сигналы обозначали характеристику натяжения транспортера 105. Другими словами, первый и второй выходные сигналы показывают, что первая и вторая цепи 120, 125, соответственно, имеют недостаточное натяжение, вызывая то, что правая и левая цепи 120, 125 висят достаточно низко, чтобы датчики 420, 425 первой и второй цепей обнаруживали первую и вторую цепи 120, 125. Датчик 420 первой цепи и датчик 425 второй цепи могут представлять собой, например, инфракрасные датчики, ультразвуковые датчики, индуктивные датчики, емкостные датчики, магнитные датчики и/или переключатели с щеточными контактами или рычаги. Хотя в проиллюстрированном варианте осуществления схема 405 автоматического управления содержит только один датчик на каждой из первой стороны (например, правой стороны) и второй стороны (например, левой стороны) переднего вала 110, в некоторых вариантах осуществления схема 405 автоматического управления может содержать более чем один датчик на каждой из первой стороны и второй стороны для получения более точного определения расстояния между цепями 120, 125 и передним валом 110. Например, электронный процессор 440 может быть способен определять, в какой степени первая цепь 120 или вторая цепь 125 имеют недостаточное натяжение на основании сигналов приближения от разных датчиков 420, 425, установленных на транспортере 105. В еще одном примере электронный процессор 440 может определять, когда первая цепь 120 имеет правильное натяжение на основании приема выходного сигнала от третьего датчика приближения, расположенного на раме выше, чем датчик 420 первой цепи.
Первый таймер 430 приближения и второй таймер 435 приближения соединены с электронным процессором 440. Первый таймер 430 приближения и второй таймер 435 приближения определяют, когда истекает заданный период выдержки. В проиллюстрированном варианте осуществления период выдержки составляет приблизительно 30 секунд. В других вариантах осуществления период выдержки может быть короче или длиннее на основании, например, длины транспортера 105.
Электронный процессор 440 соединен с датчиком 420 первой цепи, датчиком 425 второй цепи, первым таймером 430 приближения, вторым таймером 435 приближения, переключателем 415 режима и гидравлической подсистемой 255. Среди прочего электронный процессор 440 содержит блок обработки, запоминающее устройство, блоки ввода и блоки вывода. Блок обработки может содержать, например, блок управления, арифметическое логическое устройство и множество регистров. Блок обработки, запоминающее устройство, блоки ввода и блоки вывода, а также различные модули, соединенные с электронным процессором 440, соединены одной или более шинами управления и/или данных. В некоторых вариантах осуществления электронный процессор 440 может быть выполнен частично или полностью на полупроводниковом чипе, программируемой пользователем логической матрице («FPGA»), специализированной интегральной схеме и т. п. Электронный процессор 440 выполнен с возможностью извлечения из запоминающего устройства и выполнения среди прочего команд, связанных с процессами и способами управления, описанными в данном документе. В других конструкциях электронный процессор 440 содержит дополнительные, меньше или другие элементы.
Электронный процессор 440 принимает сигналы приближения от датчиков 420, 425 первой и второй цепей. Электронный процессор 440 использует сигналы приближения для определения расстояния между цепями 120, 125 и передним валом 110. Электронный процессор 440 получает указание от переключателя 415 режима, когда переключатель режима находится в первом положении (т.е. выбран автоматический режим работы). Электронный процессор 440 посылает сигнал приведения в действие в первый таймер 430 приближения и второй таймер 435 приближения. Электронный процессор 440 также отслеживает первый и второй таймеры 430, 435 приближения для определения, когда истекает период выдержки. Электронный процессор 440 также сообщается с гидравлической подсистемой 255 для управления гидравлической подсистемой 255 и посредством этого управления положением заднего вала 115 относительно переднего вала 110. В вариантах осуществления, в которых каждую цепь 120, 125 отслеживает более чем один датчик приближения, электронный процессор 440 может определять продолжительность периода выдержки на основании того, какие датчики приближения генерируют сигналы приближения. То есть, если только датчик приближения, наиболее близкий к переднему валу 110, показывает, что первая цепь 120 находится в пределах диапазона обнаружения, электронный процессор 440 может уменьшить продолжительность первого таймера 430 приближения.
В проиллюстрированном варианте осуществления электронный процессор 440 также соединен с устройствами 445a, 445b вывода для предоставления пользователю показаний относительно состояния системы натяжения транспортера. Устройства 445a, 445b вывода содержат первый индикатор 445a натяжения и второй индикатор 445b натяжения. В проиллюстрированном варианте осуществления устройства 445a, 445b вывода включают СИД, используемые для указания, когда первая цепь 120 и вторая цепь 125 натянуты. В других вариантах осуществления, однако, устройства 445a, 445b вывода могут представлять собой один или более дисплеев, показывающих, когда первая цепь 120 и вторая цепь 125 натянуты, а также другую информацию, такую как, например, текущее расстояние 210 провисания, связанное с первой цепью 120, и расстояние 210 провисания, связанное со второй цепью 125. В некоторых вариантах осуществления первый и второй индикаторы 445a, 445b натяжения могут альтернативно или дополнительно указывать, когда транспортер 105 имеет правильное натяжение. В других вариантах осуществления устройства 445a, 445b вывода могут содержать динамики, которые испускают звук, когда первая цепь 120 и вторая цепь 125 имеют правильное натяжение.
Схема 410 ручного управления содержит первый исполнительный механизм 450 натяжения и второй исполнительный механизм 455 натяжения. Схема 410 ручного управления принимает сигнал от переключателя 415 режима, когда переключатель 415 режима находится во втором положении (т.е. выбран ручной режим работы). Как показано на фиг. 4, первый исполнительный механизм 450 натяжения и второй исполнительный механизм 455 натяжения соединены с гидравлической подсистемой 255. При приведении в действие первый исполнительный механизм 450 натяжения и второй исполнительный механизм 455 натяжения включают и управляют гидравлической подсистемой 255. В проиллюстрированном варианте осуществления первый и второй исполнительные механизмы 450, 455 натяжения представляют собой кнопочные выключатели. В других вариантах осуществления первый и второй исполнительные механизмы 450,455 натяжения могут представлять собой переключатели, ползуны, виртуальные или «экранные» кнопки или исполнительные механизмы другого типа. Первый и второй исполнительные механизмы 450, 455 натяжения также соединены с устройствами 445a, 445b вывода таким образом, чтобы даже когда первый и второй исполнительные механизмы 450, 455 натяжения управляют гидравлической подсистемой 255, устройства 445a, 445b вывода указывают пользователю состояние системы натяжения транспортера.
На фиг. 5 представлено схематичное изображение гидравлической подсистемы 255. Как показано на фиг. 5, гидравлическая подсистема 255 содержит гидравлический бак 500, гидравлический насос 505, первый клапан 510 сброса давления, второй клапан 515 сброса давления, первый манометр 520, второй манометр 525, первый клапан 530 с электромагнитным управлением, второй клапан 535 с электромагнитным управлением, первый клапан 540 с ручным управлением, второй клапан 545 с ручным управлением, первый гидравлический цилиндр 550 и второй гидравлический цилиндр 555. Каждый гидравлический цилиндр 550, 555 содержит выдвигаемый поршень. Каждый из клапанов 510, 515, 530, 535, 540, 545 выполнен с возможностью переключения между открытым состоянием и закрытым состоянием. Гидравлический насос 505 соединен с гидравлическим баком 500 на стороне впуска гидравлического насоса 505 для втягивания текучей среды из гидравлического бака 500. Снова со ссылкой на фиг. 1 гидравлический насос 505 расположен на первой стороне дробилки 150.
На стороне выпуска гидравлический насос 505 соединен с первым клапаном 510 сброса давления, вторым клапаном 515 сброса давления, первым манометром 520, вторым манометром 525, первым клапаном 530 с электромагнитным управлением, вторым клапаном 535 с электромагнитным управлением, первым клапаном 540 с ручным управлением и вторым клапаном 545 с ручным управлением. Когда давление в гидравлической подсистеме превышает заданное пороговое значение, первый клапан 510 сброса давления и второй клапан 515 сброса давления обеспечивают сброс избыточного давления назад в гидравлический бак 500. В проиллюстрированном варианте осуществления заданное пороговое значение давления установлено на 600 psi (фунтов на квадратный дюйм). В других вариантах осуществления, однако, заданное пороговое значение давления может быть иным. Первый и второй клапаны 510, 515 сброса давления предотвращают работу гидравлической подсистемы 255 с давлением, которое превышает заданное пороговое значение давления. Вследствие этого, гидравлическая подсистема продолжает работать приблизительно при 600 psi. Первый манометр 520 и второй манометр 525 подают сигнал давления, соответствующий текущему давлению в гидравлической подсистеме 255. В некоторых вариантах осуществления первый манометр 520 и второй манометр 525 могут сообщаться с электронной подсистемой 250 для обеспечения более удобного отображения текущего давления гидравлической подсистемы 255 и/или для использования текущего давления гидравлической подсистемы 255 для управления системой натяжения транспортера.
Клапаны 530, 535 с электромагнитным управлением управляют давлением, создаваемым в первом и втором гидравлическим цилиндрах 550, 555. Клапаны 530, 535 с электромагнитным управлением принимают сигналы приведения в действие от электронной подсистемы 250. Когда клапаны 530, 535 с электромагнитным управлением принимают сигнал приведения в действие (т.е. при приведение в действие клапанов 530, 535 с электромагнитным управлением), клапаны переключаются из закрытого состояния в открытое состояние. Пока клапаны 530, 535 с электромагнитным управлением закрыты, первый и второй гидравлические цилиндры 550, 555 не принимают движущую силу от гидравлического насоса 505. Однако, пока первый клапан 530 с электромагнитным управлением открыт, первый гидравлический цилиндр 550 приводится в действие от гидравлического насоса 505. аналогично, пока второй клапан 535 с электромагнитным управлением открыт, второй гидравлический цилиндр 555 приводится в действие от гидравлического насоса 505. Когда гидравлические цилиндры 550, 555 приходят в движение от гидравлического насоса 505, выдвигаемый поршень каждого цилиндра выдвигается из корпуса цилиндра 550, 550. В проиллюстрированном варианте осуществления первый клапан 530 с электромагнитным управлением и второй клапан 535 с электромагнитным управлением представляют собой подпружиненные, двухходовые клапаны с электромагнитным управлением. В других вариантах осуществления, однако, можно использовать другие типы клапанов с электромагнитным управлением.
Первый и второй клапаны 540, 545 с ручным управлением обеспечивают резервный механизм управления механической подсистемой 260. Первым и вторым клапаном 540, 545 с ручным управлением управляют вручную, например, посредством механического исполнительного механизма (не показано). Когда клапаны 530, 535 с электромагнитным управлением недоступны (или неисправны) вследствие, например, отсутствия электроэнергии, вместо клапанов 530, 535 с электромагнитным управлением можно использовать первый и второй клапаны 540, 545 с ручным управлением. Клапаны 540, 545 с ручным управлением соединены с гидравлическим насосом 505 и первым и вторым гидравлическими цилиндрами 550, 555, соответственно. Клапаны 540, 545 с ручным управлением соединены параллельно с клапанами 530, 535 с электромагнитным управлением таким образом, чтобы клапаны 540, 545 с ручным управлением могли служить в качестве резервного механизма для клапанов 530, 535 с электромагнитным управлением.
Кроме того, хотя в некоторых вариантах осуществления клапаны 530, 535 с электромагнитным управлением работают только в направлении вперед (т.е. обеспечивая давление для выдвижения гидравлических цилиндров 550, 555), клапаны 540, 545 с ручным управлением могут работать в обратном направлении таким образом, чтобы втягивать гидравлические цилиндры 550, 555. Втягивание гидравлических цилиндров 550, 555 вызывает меньшее натяжение транспортера 105. Вследствие этого, в случаях, когда транспортер 105 имеет избыточное натяжение или при установке новой цепи транспортера, клапаны 540, 545 с ручным управлением работают, запуская механическую подсистему 260 в обратном направлении и понижая натяжение транспортера 105. В других вариантах осуществления клапаны 530, 535 с электромагнитным управлением могут также заставлять механическую подсистему 260 работать в обратном направлении таким образом, чтобы уменьшение натяжения транспортера можно было достигать с использованием клапанов 530, 535 с электромагнитным управлением или клапанов 540, 545 с ручным управлением.
При приведении в действие гидравлическим насосом 505 первый и второй гидравлические цилиндры 550, 555 выдвигаются (например, телескопически наружу). Первый и второй гидравлические цилиндры 550, 555 соединены с механической подсистемой 260 для перемещения заднего вала 115 в сторону от центральной линии 200 транспортера 105. В других вариантах осуществления первый и второй гидравлические цилиндры 550, 555 выполнены с возможностью перемещения переднего вала 110 вместо заднего вала 115. В других вариантах осуществления четыре гидравлических цилиндра используют для перемещения обеих сторон заднего вала 115 и обеих сторон переднего вала 110.
На фиг. 6-8 представлена механическая подсистема 260. На фиг. 6-8, однако, представлена только первая сторона механической подсистемы 260. Другими словами, хотя система натяжения транспортера содержит как первый гидравлический цилиндр, так и второй гидравлический цилиндр, для упрощения описания на фиг. 6-8 проиллюстрирован только первый гидравлический цилиндр. Однако, следует понимать, что вторая сторона механической подсистемы 260 является зеркальным отражением первой стороны механической подсистемы 260, которая описана в данном документе. На фиг. 6 представлен вид в разобранном виде механической подсистемы 260. Как показано на фиг. 6, первая сторона механической подсистемы 260 содержит механизм 600 блокировки, соединенный с первым гидравлическим цилиндром 550. механизм 600 блокировки содержит несколько опорных частей 605a-605d, которые при сборке образуют раму 610 (фиг. 7-8).
Механизм 600 блокировки также содержит принимающий брус 615, соединительную втулку 620 и блокирующую пластину 625. Блокирующая пластина 625 содержит блокирующий элемент 650, пружину 655, основание 660 и стопор 665. Блокирующий элемент 650 содержит первую часть храпового механизма. Первая часть храпового механизма расположена по длине блокирующего элемента 650 и содержит множество канавок 670 храпового механизма на нижней поверхности блокирующего элемента 650. Принимающий брус 615 содержит вторую часть храпового механизма в зацеплении с первой частью храпового механизма блокирующей пластины 625. Вторая часть храпового механизма содержит множество зубцов 630 на верхней поверхности принимающего бруса 615 и по длине 635 принимающего бруса 615. На первом конце принимающий брус 615 содержит механизм 640 соединения для соединения с соединительной втулкой 620. Принимающий брус 615 также содержит полость 642 для приема крепежного приспособления 645 первого гидравлического цилиндра 550. Соединительная втулка 620 соединяет принимающий брус 615 с задним валом 115, как показано на фиг. 7 и 8. Как показано на фиг. 6, длина 635 принимающего бруса 615 больше, чем длина блокирующего элемента 650 (следовательно, количество канавок 670 храпового механизма блокирующего элемента 650 меньше, чем количество зубцов храпового механизма принимающего бруса). Другими словами, вторая часть храпового механизма больше, чем первая часть храпового механизма.
На фиг. 7 представлен общий вид первой стороны механической подсистемы 260, а на фиг. 8 представлен вид сбоку первой стороны механической подсистемы 260. Как показано на фиг. 7-8, первая сторона механической подсистемы 260 соединена с задним валом 115. Рама 610 поддерживает принимающий брус 615 и блокирующую пластину 625. Как показано на фиг. 7 и 8, принимающий брус 615 соединен с первым гидравлическим цилиндром 550 на первом конце и соединен с соединительной втулкой 620 на противоположном конце. На фиг. 8 представлен каждый из зубцов 630 принимающего бруса 615, содержащих скошенную часть 675 и вертикальную часть 680, совместно образующие острие 685. Каждое острие 685 зубцов 630 отделено одинаковым расстоянием или шагом от другого соседнего острия 685. В проиллюстрированном варианте осуществления зубцы 630 отделены с шагом в полдюйма. В других вариантах осуществления, однако, расстояние между каждым зубцом 630 отличается.
Как показано на фиг. 8, блокирующий элемент 650 соединен со стопором 665 посредством пружины 655. Пружина 655 смещает блокирующий элемент 625 вниз в направлении принимающего бруса 615 в заблокированное положение. Канавки 670 блокирующей пластины 625 зацепляют зубцы 630 принимающего бруса 615 таким образом, чтобы при смещении блокирующего элемента 650 пружиной 655 вниз канавки 670 блокирующей пластины 625 блокировали принимающий брус 615 на месте. Вследствие этого, блокирующий элемент 650 прикладывает блокирующее усилие 690 вниз к принимающему брусу 615.
На фиг. 9 представлена блок-схема, иллюстрирующая способ 700 управления механической подсистемой 260. Хотя блок-схема фиг. 9 описана в отношении первой стороны механической подсистемы 260, следует понимать, что работа второй стороны механической подсистемы зеркально отражает действие первой стороны механической подсистемы 260. В некоторых вариантах осуществления действие первой стороны механической подсистемы 260 и действие второй стороны механической подсистемы 260 происходит одновременно. Однако, в некоторых вариантах осуществления и/или ситуациях первая сторона механической подсистемы 260 действует отдельно от второй стороны механической подсистемы 260. В проиллюстрированном варианте осуществления первая сторона механической подсистемы 260 действует отдельно от второй стороны механической подсистемы 260, потому что первая цепь 120 отличается от второй цепи 125. Оператор следит за натяжением первой стороны транспортера 105 и второй стороны транспортера 105 таким образом, чтобы транспортер 105 имел правильное натяжение как на первой стороне, так и на второй стороне транспортера 105.
Сперва один из клапанов (например, первый клапан 530 с электромагнитным управлением или первый клапан 540 с ручным управлением) открывается в направлении вперед (этап 705). Какой клапан открывается и что заставляет клапан открываться зависит от того, получает ли система натяжения транспортера электроэнергию и работает ли система натяжения транспортера в автоматическом или ручном режиме. Как объяснено более подробно ниже, когда система натяжения транспортера не получает электроэнергию, может быть открыт только первый клапан 540 с ручным управлением, но когда система натяжения транспортера получает электроэнергию, открыт клапан 530 с электромагнитным управлением. Как обсуждалось выше, пока открыт первый клапан 530 с электромагнитным управлением или первый клапан 540 с ручным управлением, гидравлический насос 505 приводит в действие первый гидравлический цилиндр 550 (этап 710). По мере того, как первый гидравлический цилиндр 550 выдвигается гидравлическим насосом 505, первый гидравлический цилиндр 550 двигает принимающий брус 615 в сторону от центральной линии 200 транспортера 105 (этап 715). Принимающий брус 615, используя энергию первого гидравлического цилиндра 550, преодолевает блокирующее усилие 690 блокирующей пластины 625 с первым зубцом A (фиг. 10) или с первым набором зубцов принимающего бруса 615 (этап 720). В частности, скошенная часть 675 зубцов 630 принимающего бруса 615 преодолевает блокирующее усилие 690 блокирующей пластины 625. На фиг. 10 представлен увеличенный вид механизма 600 блокировки во время работы. На стадии 2 фиг. 10 показано, как зубцы 630 принимающего бруса 615 выполняют функцию храпового механизма на блокирующей пластине 625. В частности, скошенная часть 675 зубцов 630 принимающего бруса 615, прикладывая вверх силу F на блокирующей пластине 625, преодолевает посредством этого блокирующее усилие 690.
По мере того, как принимающий брус 615 преодолевает блокирующее усилие 690 блокирующей пластины 625, принимающий брус 615 двигает задний вал 115 в сторону от центральной линии 200 транспортера 105 (этап 725). Другими словами, механическая подсистема 260 увеличивает натяжение первой цепи 120 транспортера 105 за счет перемещения заднего вала 115 в сторону от центральной линии 200 транспортера 105. При достижении правильного положения заднего вала 115 второй зубец B принимающего бруса входит в зацепление с блокирующей пластиной 625, блокируя посредством этого принимающий брус 615 в его новом положении (этап 730). Вертикальная часть 680 на зубцах 630 принимающего бруса 615 обеспечивает быструю блокировку блокирующей пластиной 625 принимающего бруса 615 в следующем положении. На стадии 3 фиг. 10 показан принимающий брус 615, заблокированный в новом положении. За счет медленного (например, с шагом в полдюйма) изменения положения принимающего бруса 615 механическая подсистема 260 может блокировать принимающий брус 615 в точном положении для установки правильного положения для заднего вала 115 и установки посредством этого правильного натяжения транспортера 105. Хотя проиллюстрированный вариант осуществления описан в виде перемещения заднего вала 115, в некоторых вариантах осуществления передний вал 110 двигают относительно заднего вала 115. В других вариантах осуществления как задний вал 115, так и передний вал 110 двигают друг относительно друга.
Система натяжения транспортера также уменьшает натяжение транспортера 105 с использованием первого и второго клапанов 540, 545 с ручным управлением, например, когда цепь (цепи) транспортер имеют избыточное натяжение или при установке новой цепи транспортера. В таких вариантах осуществления пользователь вручную отцепляет блокирующую пластину 625 от принимающего бруса 615, например, за счет перемещения стопора 665 таким образом, чтобы пружина 655 остановила смещение блокирующей пластины 625 вниз. После отцепления блокирующей пластины 625 клапаны 540, 545 с ручным управлением можно задействовать для уменьшения некоторой части натяжения транспортера 105. Например, когда первый клапан 540 с ручным управлением открыт в обратном направлении, первый гидравлический цилиндр 550 втягивается, что вызывает движение заднего вала 115 в направлении центральной линии 200 транспортера 105. Движение заднего вала 115 в направлении центральной линии 200 транспортера 105 уменьшает натяжение транспортера 105. После того, как транспортер 105 имеет правильное натяжение, что можно определить, например, по индикаторам 445a, 445b натяжения, пользователь повторно зацепляет блокирующую пластину 625, сохраняя положение заднего вала 115. В некоторых вариантах осуществления для уменьшения натяжения транспортера 105 также можно использовать клапаны 540, 545 с электромагнитным управлением.
На фиг. 11 представлен способ 800 работы системы натяжения транспортера. Сперва приводят в действие гидравлический насос 505 (этап 805). В некоторых вариантах осуществления для включения (например, активации) гидравлического насоса 505 предоставлен отдельный исполнительный механизм. В других вариантах осуществления, однако, гидравлический насос 505 включается при включении системы натяжения транспортера. Затем, электронная подсистема 250 получает указание о режиме работы системы натяжения транспортера (этап 810). При выборе автоматического режима система натяжения транспортера приводится в действие в автоматическом режиме (этап 815), показанном более подробно на фиг. 12. С другой стороны, при выборе ручного режима система натяжения транспортера приводится в действие в ручном режиме (этап 820), показанном более подробно на фиг. 13. При достижении правильного натяжения транспортера 105 клапаны 530, 535 с электромагнитным управлением выключаются или закрываются (этап 825). Закрытие клапанов 530, 535 с электромагнитным управлением прекращает выдвижение гидравлических цилиндров 550, 555 (этап 830). Затем блокирующая пластина 625 зацепляет принимающий брус 615 в текущем положении (этап 835). В некоторых вариантах осуществления, например, когда принимающий брус 615 находится в середине положения сдвига (например, зубцы 630 принимающего бруса 615 не полностью преодолели блокирующее усилие 690), принимающий брус 615 движется назад в предыдущее положение перед блокировкой на месте блокирующей пластиной 625. В итоге, гидравлический насос 505 выключается (этап 840).
На фиг. 12 представлен способ 900 управления системой натяжения транспортера в автоматическом режиме. После приема выбора автоматического режима работы электронный процессор 440 ожидает приема первого сигнала приближения от первого датчика 420 цепи приближения и/или второго сигнала приближения от второго датчика 425 цепи приближения (этап 905). Не получение первого сигнала приближения или второго сигнала приближения означает, что транспортер 105 имеет правильное натяжение (или по меньшей мере не пониженное натяжение). Вследствие этого, электронный процессор 440 продолжает отслеживать получение сигналов приближения. С другой стороны, получение первого сигнала приближения или второго сигнала приближения означает, что первая или вторая сторона транспортера 105 имеет неправильное натяжение. Вследствие этого, когда электронный процессор 440 принимает сигнал приближения (например, правый сигнал приближения или левый сигнал приближения), электронный процессор 440 посылает сигнал приведения в действие в соответствующий клапан с электромагнитным управлением (стадия 910) и запускает соответствующий таймер приближения (стадия 915). Например, когда электронный процессор 440 принимает первый сигнал приближения, электронный процессор 440 посылает сигнал приведения в действие в первый клапан 530 с электромагнитным управлением и запускает первый таймер 430 приближения. С другой стороны, когда электронный процессор 440 принимает второй сигнал приближения, электронный процессор 440 посылает сигнал приведения в действие во второй клапан 535 с электромагнитным управлением и запускает второй таймер 435 приближения.
В ответ на сигнал (сигналы) приведения в действие в первый и второй клапаны 530, 535 с электромагнитным управлением механическая подсистема 260 приводится в действие, как описано выше относительно фиг. 9 и 10 (этап 920). Затем электронный процессор 440 определяет, истекло ли время соответствующего таймера 430, 435 приближения (этап 925). Когда время таймера 430, 435 приближения не истекло, электронный процессор 440 продолжает подавать сигнал приведения в действие в соответствующий клапан 530, 535 с электромагнитным управлением, чтобы оставить клапан с электромагнитным управлением открытым (этап 915), и механическая подсистема 260 продолжает работать. При истечении времени таймера 430, 435 приближения система натяжения транспортера переходит к деактивации первого и второго клапанов 530, 535 с электромагнитным управлением (этап 825 фиг. 11).
Поскольку гидравлическая подсистема 255 содержит клапаны сброса давления, установленные во время работы на заданное давление, гидравлическая подсистема 255 остается с заданным давлением. Это заданное давление обеспечивает, чтобы транспортер имел правильное натяжение в течение заданного периода выдержки таймера 430, 435 приближения. Кроме того, во время натяжения транспортера 105 операторы определяют, равно ли приблизительно натяжение на первой стороне транспортера (например, правой стороне) натяжению на другой стороне транспортера (например, левой стороне). Если натяжение на противоположных сторонах транспортера 105 отличается, оператор может изменить натяжение по меньшей мере одной из сторон для достижения приблизительно равного натяжения.
На фиг. 13 представлена блок-схема, иллюстрирующая способ 1000 работы, когда система натяжения транспортера работает в ручном режиме. После приема выбора ручного режима работы система натяжения транспортера ожидает получения ввода пользователя посредством первого и/или второго исполнительных механизмов 450, 455 натяжения (этап 1005). Когда система натяжения транспортера принимает ввод пользователя от первого или второго исполнительного механизма 450, 455, натяжения, электронная подсистема 250 посылает сигналы приведения в действие в соответствующий клапан 530, 535 с электромагнитным управлением (этап 1010). Электронная подсистема 250 посылает сигнал приведения в действие в первый клапан 530 с электромагнитным управлением, когда пользователь приводит в действие первый исполнительный механизм 450 натяжения, и посылает сигнал приведения в действие во второй клапан 535 с электромагнитным управлением, когда пользователь приводит в действие второй исполнительный механизм 455 натяжения. В ответ на подачу сигнала (сигналов) приведения в действие в первый и второй клапан (клапаны) 530, 535 с электромагнитным управлением механическая подсистема 260 работает, как описано относительно фиг. 9 (этап 1015). Затем электронная подсистема 250 определяет, поступает ли все еще ввод пользователя через первый и/или второй исполнительные механизмы 450, 455 натяжения (этап 1035).
Когда ввод пользователя все еще поступает через первый и/или второй исполнительные механизмы 450, 455 натяжения, продолжается подача сигнала приведения в действие в первый и/или второй клапаны 530, 535 с электромагнитным управлением (этап 1010). Когда ввод пользователя больше не поступает (например, когда пользователь прекращает приводить в действие первый и/или второй исполнительные механизмы 450, 455 натяжения), система натяжения транспортера переходит к деактивации первого и второго клапанов 530, 535 с электромагнитным управлением (этап 825 фиг. 11).
Как обсуждалось выше, поскольку гидравлическая подсистема 255 выполнена таким образом, чтобы достигалось максимальное давление 600 psi, транспортер 105 не имеет повышенного натяжения, даже если пользователь продолжает нажимать первый или второй исполнительные механизмы 450, 455 натяжения. Кроме того, как обсуждалось выше относительно фиг. 12, оператор определяет, равно ли приблизительно натяжение первой цепи 120 натяжению второй цепи 125, и производит необходимые изменения, когда натяжение первой цепи 120 и второй цепи 125 значительно отличаются.
На фиг. 14 представлен еще один пример транспортера 105a, и в частности, положения датчика 420a цепи. Следует понимать, что аналогичный датчик цепи расположен для второй цепи транспортера 105a. Как показано на фиг. 14, датчик 420a цепи может быть расположен рядом с одним из валов транспортера 100. В проиллюстрированном варианте осуществления датчик 420a цепи устанавливают на опоре звездочки, обычно используемой для поддержки звездочки. Датчики 420a цепей определяют количество звеньев цепи, которые находятся в конкретной зоне. Например, датчик 420a цепи может определять, сколько звеньев цепи находится в зоне разгрузки транспортера 105. Количество звеньев цепи в зоне разгрузки служит указанием, имеет ли транспортер 105 недостаточное натяжение или избыточное натяжение. На фиг. 15 представлено еще одно иллюстративное расположение датчика 420a цепи. На фиг. 15 показано, что первый датчик 605 цепи установлен на опоре звездочки, а второй датчик цепи 610 установлен на боковой пластине 615 транспортера 105. Первый датчик 605 цепи и вторая цепь 610 обеспечивают информацию, касающуюся количества звеньев цепи в зоне разгрузки и/или величины расстояния провисания.
Система натяжения транспортера и ее способ работы, описанные в данном документе, можно включить в другие транспортирующие системы, используемые в горных работах, такие как, например, забойный скребковый транспортер («AFC»), консольный перегружатель («BSL») или другая транспортирующая система. Кроме того, хотя система натяжения транспортера и способы ее работы описаны относительно цепного транспортера, систему натяжения транспортера можно включить в транспортеры другого типа, такие как, например, ленточный транспортер, и транспортеры другого типа.
Пример 1: способ работы системы натяжения транспортера, причем способ включает открытие клапана системы натяжения транспортера, перемещение гидравлическим насосом гидравлического цилиндра, когда клапан открыт, и перемещение гидравлическим цилиндром принимающего бруса в сторону от центральной линии транспортера. Способ также включает преодоление первым зубцом принимающего бруса блокирующего усилия блокирующей пластины, перемещение принимающим брусом ведущего вала транспортера в сторону от центральной линии транспортера, и блокировку принимающего бруса путем зацепления блокирующей пластиной второго зубца принимающего бруса.
Пример 2: способ примера 1, дополнительно включающий получение указания о режиме работы системы натяжения транспортера, причем режимом работы является один из группы, состоящей из автоматического режима и ручного режима.
Пример 3: способ примера 2, в котором клапан представляет собой клапан с электромагнитным управлением, и в котором, когда система натяжения транспортера работает в ручном режиме, открывание клапана включает получение исполнительным механизмом входного сигнала и подачу сигнала приведения в действие в клапан в ответ на входной сигнал.
Пример 4: способ примеров 2 и/или 3, при этом, когда система натяжения транспортера работает в автоматическом режиме, открывание клапана включает получение от датчика выходного сигнала, связанного с характеристикой натяжения транспортера, и подачу сигнала приведения в действие в клапан на основании выходного сигнала.
Пример 5: способ примера 4, при этом прием выходного сигнала включает в себя этап, на котором осуществляют прием сигнала приближения от датчика приближения, причем сигнал приближения соответствует расстоянию между цепью транспортера и датчиком приближения, определение электронным процессором, находится ли цепь в пределах заданного диапазона расстояний от ведущего вала транспортера на основании сигнала приближения, и при этом подача сигнала приведения в действие на основании выходного сигнала включает в себя этап, на котором осуществляют подачу сигнала приведения в действие в клапан, когда цепь находится за пределами заданного диапазона расстояний от ведущего вала транспортера.
Пример 6: способ любого из примеров 1-5, дополнительно включающий получение электронным процессором сигнала приближения от датчика приближения, причем сигнал приближения соответствует расстоянию между цепью транспортера и датчиком приближения, определение электронным процессором, находится ли расстояние между цепью и датчиком приближения в пределах заданного диапазона расстояний, и закрытие клапана, когда расстояние между цепью и датчиком приближения находится в пределах заданного диапазона расстояний.
Пример 7: способ любого из примеров 1-6, дополнительно включающий получение от датчика давления сигнала давления, причем сигнал давления означает натяжение транспортера, определение, находится ли сигнал давления в пределах заданного диапазона, и закрытие клапана, когда сигнал давления находится в пределах заданного диапазона.
Пример 8: способ любого из примеров 1-7, дополнительно включающий определение, равно ли приблизительно первое натяжение транспортера второму натяжению транспортера, и закрытие клапана, когда первое натяжение транспортера приблизительно равно второму натяжению транспортера.
Пример 9: способ по п. 1, дополнительно включающий определение, выполнено ли первое условие системы натяжения транспортера, определение, выполнено ли второе условие системы натяжения транспортера, и закрытие клапана, при выполнении первого условия и второго условия системы натяжения транспортера.
Пример 10: система натяжения транспортера содержит клапан, выполненный с возможностью переключения между открытым состоянием и закрытым состоянием, гидравлический насос, соединенный с клапаном с электромагнитным управлением и выполненный с возможностью перемещения гидравлического цилиндра, когда клапан с электромагнитным управлением находится в открытом состоянии, гидравлический цилиндр, соединенный с клапаном и с принимающим брусом и выполненный с возможностью перемещения принимающего бруса, когда гидравлический цилиндр приводится в действие от гидравлического насоса, и принимающий брус. Принимающий брус соединен с гидравлическим цилиндром и с ведущим валом транспортера, причем принимающий брус содержит первый зубец и второй зубец, причем первый зубец сцеплен с блокирующей пластиной. Принимающий брус выполнен с возможностью преодоления блокирующего усилия блокирующей пластины с первым зубцом и перемещения ведущего вала в сторону от центральной линии транспортера, когда принимающий брус приводится в действие от гидравлического цилиндра. Система натяжения транспортера также содержит блокирующую пластину, соединенную с принимающим брусом и выполненную с возможностью блокировки принимающего бруса за счет зацепления второго зубца принимающего бруса.
Пример 11: система примера 10 дополнительно содержит переключатель режима, выполненный с возможностью указания режима работы системы натяжения транспортера. Причем режимом работы является один из группы, состоящей из автоматического режима и ручного режима.
Пример 12: система примера 11, при этом клапаном является клапан с электромагнитным управлением, который дополнительно содержит исполнительный механизм, выполненный с возможностью приема входного сигнала, при этом, когда натяжение транспортера действует в ручном режиме, исполнительный механизм выполнен с возможностью подачи сигнала приведения в действие в клапан с электромагнитным управлением в ответ на входной сигнал.
Пример 13: система примеров 11 или 12, дополнительно содержащая датчик, выполненный с возможностью генерирования выходного сигнала, связанного с характеристикой натяжения транспортера, и электронный процессор, выполненный с возможностью приема выходного сигнала от датчика, и когда система натяжения транспортера работает в автоматическом режиме, подачи сигнала приведения в действие в клапан с электромагнитным управлением на основании выходного сигнала от датчика.
Пример 14: система примера 13, при этом датчик представляет собой датчик приближения, выполненный с возможностью генерирования сигнала приближения, соответствующего расстоянию между цепью транспортера и датчиком приближения, и при этом электронный процессор кроме того выполнен с возможностью определения, находится ли цепь в пределах заданного диапазона расстояний от ведущего вала транспортера на основании сигнала приближения, и подачи сигнала приведения в действие, когда цепь находится за пределами заданного диапазона расстояний от ведущего вала транспортера.
Пример 15: система любого из примеров 10-14, при этом электронный процессор кроме того выполнен с возможностью приема сигнала приближения от датчика приближения, причем сигнал приближения соответствует расстоянию между цепью транспортера и датчиком приближения, и определения, находится ли расстояние между цепью и датчиком приближения в пределах заданного диапазона расстояний, и подачи сигнала закрытия в клапан с электромагнитным управлением для закрытия клапана, когда расстояние между цепью и датчиком приближения находится в пределах заданного диапазона расстояний.
Пример 16: система любого из примеров 10-15, дополнительно содержащая датчик давления, выполненный с возможностью генерирования сигнала давления, указывающего натяжение транспортера, и при этом электронный процессор посылает сигнал закрытия в клапан с электромагнитным управлением, когда сигнал давления находится в пределах заданного диапазона.
Различные признаки и преимущества изобретения изложены в следующей формуле изобретения.
Способ натяжения транспортирующего элемента транспортера включает генерирование датчиком приближения выходного сигнала, указывающего, что транспортирующий элемент имеет недостаточное натяжение, прием выходного сигнала от датчика приближения и переключение клапана с электромагнитным управлением в открытое состояние в ответ на прием выходного сигнала от датчика приближения. Способ также включает приведение в действие насосом поршня цилиндра, в то время как клапан с электромагнитным управлением находится в открытом состоянии, толкание цилиндром принимающего бруса, содержащего вторую часть храпового механизма в зацеплении с первой частью храпового механизма блокирующей пластины, и прикладывание блокирующей пластиной блокирующего усилия к принимающему брусу. Способ дополнительно включает преодоление блокирующего усилия и перемещение вала транспортера в сторону от центральной линии транспортера принимающим брусом при преодолении блокирующего усилия. 6 н. и 20 з.п. ф-лы, 15 ил.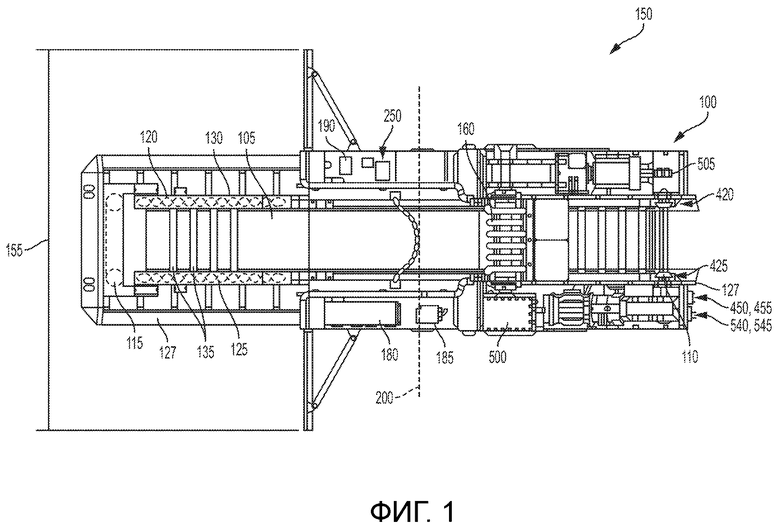
1. Способ натяжения транспортирующего элемента транспортера, включающий в себя этапы, на которых:
генерируют датчиком приближения выходной сигнал, указывающий, что транспортирующий элемент имеет недостаточное натяжение;
получают электронным процессором выходной сигнал от датчика приближения;
приводят в действие электронным процессором гидравлическое устройство, содержащее цилиндр с выдвигаемым поршнем;
толкают цилиндром принимающий брус, соединенный с цилиндром и с валом транспортера;
прикладывают блокирующей пластиной блокирующее усилие к принимающему брусу;
преодолевают блокирующее усилие блокирующей пластины; и
перемещают вал транспортера в сторону от центральной линии транспортера принимающим брусом, когда приводят в действие цилиндр и преодолевают блокирующее усилие.
2. Способ по п. 1, дополнительно включающий в себя этапы, на которых:
приводят в действие клапан с ручным управлением посредством исполнительного механизма, причем клапан с ручным управлением соединен между насосом и цилиндром гидравлического устройства; и
приводят в действие посредством насоса выдвигаемый поршень цилиндра в ответ на приведение в действие клапана с ручным управлением.
3. Способ по п. 1, в котором генерирование выходного сигнала включает в себя этап, на котором определяют, что транспортирующий элемент находится в пределах диапазона обнаружения датчика приближения, и генерируют выходной сигнал в ответ на определение транспортирующего элемента в пределах диапазона обнаружения.
4. Способ по п. 1, дополнительно включающий в себя этапы, на которых:
получают электронным процессором сигнал приведения в действие от исполнительного механизма;
приводят в действие электронным процессором гидравлическое устройство в течение заданного периода времени в ответ на прием сигнала приведения в действие.
5. Способ по п. 4, дополнительно включающий в себя этапы, на которых:
получают электронным процессором указание о состоянии переключателя режима;
приводят в действие электронным процессором гидравлическое устройство в ответ на выходной сигнал от датчика приближения, когда переключатель режима находится в первом состоянии; и
приводят в действие электронным процессором гидравлическое устройство в ответ на сигнал приведения в действие от исполнительного механизма, когда переключатель режима находится во втором состоянии.
6. Способ по п. 1, дополнительно включающий в себя этап, на котором смещают пружиной блокирующую пластину в заблокированное положение, в котором первая часть храпового механизма входит в зацепление со второй частью храпового механизма.
7. Способ по п. 1, в котором датчиком приближения является первый датчик приближения и выходным сигналом является первый выходной сигнал, и способ дополнительно включает в себя этап, на котором генерируют вторым датчиком приближения второй выходной сигнал, являющийся указателем транспортирующего элемента; и приводят в действие клапан с электромагнитным управлением на основании первого выходного сигнала и второго выходного сигнала.
8. Система натяжения транспортирующего элемента транспортера, содержащая:
гидравлическое устройство, содержащее цилиндр с выдвигаемым поршнем;
блокирующую пластину, содержащую смещающую пружину и блокирующий элемент, имеющий множество канавок храпового механизма, причем смещающая пружина смещает блокирующий элемент и множество канавок храпового механизма к принимающему брусу;
принимающий брус, соединенный с цилиндром и соединенный с валом транспортера, причем принимающий брус содержит множество зубьев, продолжающихся по длине принимающего бруса и выполненных с возможностью зацепления с канавками храпового механизма блокирующего элемента, при этом принимающий брус двигает вал транспортера в направлении вперед в сторону от центральной линии транспортера, когда преодолевает блокирующее усилие блокирующей пластины, предотвращающее приведение смещающей пружиной множества канавок храпового механизма в зацепление с множеством зубьев.
9. Система натяжения по п. 8, содержащая переключатель режима, переключаемый между первым состоянием, в котором клапан гидравлического устройства приводится в действие в ответ на выходной сигнал от датчика, и вторым состоянием, в котором клапан приводится в действие в ответ на приведение в действие исполнительного механизма.
10. Система натяжения по п. 9, в которой выходной сигнал от датчика указывает, находится ли транспортирующий элемент, приводимый в действие валом, в пределах заданного расстояния от датчика, так что выходной сигнал указывает, когда транспортирующий элемент имеет недостаточное натяжение.
11. Система натяжения по п. 8, дополнительно содержащая клапан с ручным управлением, соединенный с насосом и цилиндром гидравлического устройства, выполненный с возможностью приведения насосом в действие цилиндра, когда клапан гидравлического устройства неисправен.
12. Система натяжения по п. 11, в которой клапан с ручным управлением выполнен с возможностью приведения в действие цилиндра в обратном направлении к центральной линии транспортера.
13. Система натяжения по п. 8, в которой блокирующая пластина смещается пружиной в заблокированное положение.
14. Система натяжения по п. 8, в которой первая часть храпового механизма принимающего бруса длиннее, чем вторая часть храпового механизма блокирующей пластины.
15. Система натяжения по п. 8, дополнительно содержащая:
датчик приближения, выполненный с возможностью генерирования выходного сигнала, указывающего, что транспортирующий элемент имеет недостаточное натяжение, когда транспортирующий элемент попадает в диапазон обнаружения датчика приближения; и
электронный процессор, соединенный с датчиком приближения и гидравлическим устройством, причем электронный процессор выполнен с возможностью:
приема выходного сигнала от датчика приближения;
приведения в действие клапана гидравлического устройства в открытое состояние в ответ на прием выходного сигнала.
16. Система натяжения по п. 15, в которой датчиком приближения является первый датчик приближения, а выходным сигналом является первый выходной сигнал, и дополнительно содержащая второй датчик приближения, при этом клапан с электромагнитным управлением приводится в действие на основании первого выходного сигнала от первого датчика приближения и второго выходного сигнала от второго датчика приближения.
17. Система натяжения по п. 8, в которой множество канавок храпового механизма равномерно дистанцированы на первой стороне блокирующего элемента, которая обращена к принимающему брусу, и множество зубьев равномерно дистанцированы на первой стороне принимающего бруса, которая обращена к блокирующему элементу.
18. Система натяжения транспортирующего элемента транспортера, содержащая:
гидравлическое устройство, содержащее цилиндр с выдвигаемым поршнем;
блокирующую пластину;
принимающий брус, соединенный с цилиндром и соединенный с валом транспортера, причем принимающий брус двигает вал транспортера в направлении вперед в сторону от центральной линии транспортера, когда преодолевает блокирующее усилие блокирующей пластины, и
переключатель режима, переключаемый между первым состоянием, в котором клапан гидравлического устройства приводится в действие в ответ на выходной сигнал от датчика приближения, и вторым состоянием, в котором клапан приводится в действие в ответ на приведение в действие исполнительного механизма натяжения.
19. Система натяжения по п. 18, в которой выходной сигнал датчика указывает на то, что транспортирующий элемент, приводимый в действие валом, находится на заданном расстоянии от датчика, таком что выходной сигнал указывает на то, что транспортирующий элемент имеет недостаточное натяжение.
20. Система натяжения по п. 18, в которой датчиком приближения является первый датчик, а выходным сигналом является первый выходной сигнал, и дополнительно содержащая второй датчик, при этом клапан приводится в действие на основании первого выходного сигнала от первого датчика и второго выходного сигнала от второго датчика.
21. Система натяжения по п. 18, дополнительно содержащая электронный процессор, соединенный с клапаном, причем электронный процессор выполнен с возможностью переключения клапана в открытое состояние в течение заданного периода времени в ответ на приведение в действие исполнительного механизма.
22. Система натяжения транспортирующего элемента транспортера, содержащая:
гидравлическое устройство, содержащее цилиндр с выдвигаемым поршнем;
блокирующую пластину;
принимающий брус, соединенный с цилиндром и соединенный с валом транспортера, причем принимающий брус двигает вал транспортера в направлении вперед в сторону от центральной линии транспортера, когда преодолевает блокирующее усилие блокирующей пластины, и
клапан с ручным управлением, соединенный с насосом и цилиндром гидравлического устройства, выполненный с возможностью приведения насосом в действие цилиндра, когда клапан гидравлического устройства неисправен.
23. Система натяжения по п. 22, в которой клапан с ручным управлением выполнен с возможностью приведения в действие цилиндра в обратном направлении к центральной линии транспортера.
24. Система натяжения транспортирующего элемента транспортера, содержащая:
гидравлическое устройство, содержащее цилиндр с выдвигаемым поршнем;
блокирующую пластину;
принимающий брус, соединенный с цилиндром и соединенный с валом транспортера, причем принимающий брус двигает вал транспортера в направлении вперед в сторону от центральной линии транспортера, когда преодолевает блокирующее усилие блокирующей пластины,
при этом блокирующая пластина содержит первую часть храпового механизма и принимающий брус содержит вторую часть храпового механизма, причем вторая часть храпового механизма больше, чем первая часть храпового механизма.
25. Система натяжения транспортирующего элемента транспортера, содержащая:
гидравлическое устройство, содержащее цилиндр с выдвигаемым поршнем;
блокирующую пластину;
принимающий брус, соединенный с цилиндром и соединенный с валом транспортера, причем принимающий брус двигает вал транспортера в направлении вперед в сторону от центральной линии транспортера, когда преодолевает блокирующее усилие блокирующей пластины,
датчик приближения, выполненный с возможностью генерирования выходного сигнала, указывающего, что транспортирующий элемент имеет недостаточное натяжение, когда транспортирующий элемент попадает в диапазон обнаружения датчика приближения; и
электронный процессор, соединенный с датчиком приближения и гидравлическим устройством, причем электронный процессор выполнен с возможностью:
приема выходного сигнала от датчика приближения;
приведения в действие клапана гидравлического устройства в открытое состояние в ответ на прием выходного сигнала.
26. Система натяжения по п. 25, в которой датчиком приближения является первый датчик приближения, а выходным сигналом является первый выходной сигнал, и дополнительно содержащая второй датчик приближения, при этом клапан с электромагнитным управлением приводится в действие на основании первого выходного сигнала от первого датчика приближения и второго выходного сигнала от второго датчика приближения.
| УСТРОЙСТВО ДЛЯ ШТАМПОВКИ ЛИСТОВЫХ ДЕТАЛЕЙ К ПРЕССУ | 1993 |
|
RU2042453C1 |
| КОНВЕЙЕР | 2011 |
|
RU2550238C2 |
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| СИСТЕМА ОХЛАЖДЕНИЯ | 2017 |
|
RU2703664C1 |

