Изобретение относится к области обработки оптических сигналов и может быть использовано в оптико-электронных системах различного назначения.
Известен способ определения координат центра тяжести изображения [1], основанный на проецировании оптического сигнала объекта на фотоприемную матрицу, дискретизации оптического сигнала, преобразовании оптического сигнала в электрический сигнал Э(m : n), где  - число разложения по ортогональным осям матрицы, определении координат центра тяжести изображения относительно выбранной системы координат, при этом формируют из полученных электрических сигналов две группы дискретизированных и две группы интегральных сигналов.
- число разложения по ортогональным осям матрицы, определении координат центра тяжести изображения относительно выбранной системы координат, при этом формируют из полученных электрических сигналов две группы дискретизированных и две группы интегральных сигналов.
Способ имеет следующие недостатки: достаточно большое время нахождения координат центра изображения, а также низкая точность оценки координат центра тяжести изображения, обусловленная наличием шумовой составляющей выходных сигналов, вызванной воздействием внутренних и внешних шумов и влияющих на пространственное распределение их величин.
Наиболее близким по технической сущности к предлагаемому способу является способ определения координат центра тяжести изображения [2], основанный на проецировании оптического сигнала объекта на фотоприемную матрицу, дискретизации оптического сигнала, преобразовании оптического сигнала в электрический сигнал, осуществлении поправки соответствующей аддитивной составляющей искажения изображения, корректировке обрабатываемых сигналов обратно пропорционально мультипликативной составляющей искажений и формирование групп взвешенных с весами обратными нелинейными искажениями фотоприемной матрицы строчных интегральных сигналов и на их основе определении координат центра тяжести изображения. Способ имеет следующие недостатки: достаточно большое время нахождения координат центра изображения, а также низкая точность оценки координат центра тяжести изображения, обусловленная наличием шумовой составляющей выходных сигналов, вызванной воздействием внутренних и внешних шумов и влияющих на пространственное распределение их величин.
Техническим результатом, на достижение которого направлено предлагаемое изобретение, является повышение точности определения координат центра тяжести оптического изображения.
Технический результат достигается тем, что в известном способе определения координат центра тяжести оптического изображения, основанном на проецировании оптического сигнала на фотоприемную матрицу приемника размерам M×N фотоэлементов, координатной привязке номеров фотоэлементов, преобразовании оптического сигнала фотоприемной матрицей приемника в матрицу M×N выходных электрических сигналов, формируют среднее значение icp выходных электрических сигналов как  где ij - выходной электрический сигнал j-го фотоэлемента,
где ij - выходной электрический сигнал j-го фотоэлемента,  - номер фотоэлемента, определяют уровень порога для выходных электрических сигналов как
- номер фотоэлемента, определяют уровень порога для выходных электрических сигналов как  где Рлт - заданное значение вероятности ложной тревоги, Е() - выделение целой части из полученного значения в сторону уменьшения, осуществляют пороговую обработку выходных электрических сигналов фотоэлементов, если ij≥γ, то формируют электрический сигнал j-го фотоэлемента как ijγ=ij, если ij<γ, то формируют электрический сигнал j-го фотоэлемента как ijγ=ij=0, определяют номер фотоэлемента имеющего максимальный выходной сигнал как
где Рлт - заданное значение вероятности ложной тревоги, Е() - выделение целой части из полученного значения в сторону уменьшения, осуществляют пороговую обработку выходных электрических сигналов фотоэлементов, если ij≥γ, то формируют электрический сигнал j-го фотоэлемента как ijγ=ij, если ij<γ, то формируют электрический сигнал j-го фотоэлемента как ijγ=ij=0, определяют номер фотоэлемента имеющего максимальный выходной сигнал как  а координаты центра тяжести изображения по координатам k-го фотоэлемента, отображают значение координат центра тяжести изображения.
а координаты центра тяжести изображения по координатам k-го фотоэлемента, отображают значение координат центра тяжести изображения.
Сущность изобретения заключается в пороговом ограничении выходных электрических сигналов, исключающей влияние части внутренних и внешних шумов на их пространственное распределение.
На фигуре 1 представлена схема, поясняющая сущность способа (где: 1 -матричный фотоприемник, 2 - оптическое изображение на фотоматрице, 3 - вычислитель суммы, 4 - вычислитель порога, 5 - пороговое устройство, 6 - вычислитель координат цента тяжести изображения). В целом задача определения координат центра тяжести изображения в предлагаемом способе решается следующим образом. Осуществляют координатную привязку номеров фотоэлементов матрицы размера M×N матичного фотоприемника 1. Оптический сигнал проецируют в виде изображения 2 на матрицу фотоэлементов матичного фотоприемника 1 и преобразуют оптический сигнал в матрицу M×N выходных электрических сигналов. Выходные электрические сигналы поступают в вычислитель суммы 3, который формирует среднее значения их величин icp
где ij - выходной электрический сигнал j-го фотоэлемента;  - номер фотоэлемента.
- номер фотоэлемента.
Средняя величина электрического сигнала icp поступает в вычислитель порога 4, в котором определяют уровень порога для выходных электрических сигналов как
где Рлт - заданное значение вероятности ложной тревоги, E() - выделение целой части из полученного значения в сторону уменьшения.
Сигнал уровня порога поступает в пороговые устройства 5, которые ограничивают уровень выходных электрических сигналов фотоэлементов по правилам: если ij≥γ, то формируют электрический сигнал j-го фотоэлемента как ijγ=ij, если ij<γ, то формируют электрический сигнал j-го фотоэлемента как ijγ=ij=0. Сформированные сигналы фотоэлементов поступают в вычислитель координат цента тяжести изображения 6, в котором определяют номер фотоэлемента имеющего максимальный выходной сигнал как
где 
Координаты центра тяжести изображения определяют по координатам k -го фотоэлемента и отображают их значения.
На фигуре 2 представлена блок - схема устройства, с помощью которого может быть реализован предлагаемый способ. Блок - схема устройства содержит электронно-вычислительный модуль 7. Остальные обозначения соответствуют фигуре 1.
Устройство работает следующим образом. Заносят в электронно-вычислительный модуль 7 данные о координатной принадлежности фотоэлементах матричного фотоприемника 1, а также значения вероятностей ложной тревоги. Матричный фотоприемник 1 принимает оптические сигналы, сформированные выходные электрические сигналы направляет в электронно-вычислительный модуль 7. Электронно-вычислительный модуль 7 осуществляет преобразование выходных сигналов в расчетные величины, вычисляет и отображает координаты центра тяжести изображения.
Таким образом, предлагаемый способ позволяет повысить точность определения координат центра тяжести изображения за счет порогового ограничения выходных электрических сигналов, исключающей влияние части внутренних и внешних шумов на их пространственное распределение.
Предлагаемое техническое решение является новым, поскольку из общедоступных сведений неизвестен способ определения координат центра тяжести оптического изображения, основанного на проецировании оптического сигнала на фотоприемную матрицу приемника размерам M×N фотоэлементов, координатной привязке номеров фотоэлементов, преобразовании оптического сигнала фотоприемной матрицей приемника в матрицу M×N выходных электрических сигналов, формировании среднего значения icp выходных электрических сигналов как  где ij - выходной электрический сигнал j-го фотоэлемента,
где ij - выходной электрический сигнал j-го фотоэлемента,  - номер фотоэлемента, определяют уровень порога для выходных электрических сигналов как
- номер фотоэлемента, определяют уровень порога для выходных электрических сигналов как  где Рлт - заданное значение вероятности ложной тревоги, E() - выделение целой части из полученного значения в сторону уменьшения, осуществлении пороговой обработки выходных электрических сигналов фотоэлементов, формировании при ij≥γ электрического сигнала j-го фотоэлемента как ijγ=ij, формировании ij<γ электрического сигнала j-го фотоэлемента как ijγ=ij=0, определении номера фотоэлемента, имеющего максимальный выходной сигнал, как
где Рлт - заданное значение вероятности ложной тревоги, E() - выделение целой части из полученного значения в сторону уменьшения, осуществлении пороговой обработки выходных электрических сигналов фотоэлементов, формировании при ij≥γ электрического сигнала j-го фотоэлемента как ijγ=ij, формировании ij<γ электрического сигнала j-го фотоэлемента как ijγ=ij=0, определении номера фотоэлемента, имеющего максимальный выходной сигнал, как  а координат центра тяжести изображения по координатам k-го фотоэлемента, отображении значения координат центра тяжести изображения.
а координат центра тяжести изображения по координатам k-го фотоэлемента, отображении значения координат центра тяжести изображения.
Предлагаемое техническое решение практически применимо, так как для его реализации могут быть использованы типовые оптико-электронные и электротехнические узлы и устройства.
1. Патент №2013029. МПК H04N 17/00. Способ определения координат центра тяжести изображения / В.Г. Красиленко, Б.Г. Бойко; заявитель ВПИ, заявка №874310325 от 30.09.1987 г.
2. Патент №2550523. МПК G06T 7/60, G06C 21/24. Способ определения координат центра тяжести изображения / П.В. Васильев, Д.Ю. Коновалов, В.В. Поляков и др.; заявитель ВКА А.Ф. Можайского, бюл. №13 от 10.05.2015 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения декартовых координат геометрического центра светового пятна | 1986 |
|
SU1412003A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕНТРА ТЯЖЕСТИ ИЗОБРАЖЕНИЯ | 2013 |
|
RU2550523C2 |
| Устройство определения координат центра тяжести светового пятна | 1986 |
|
SU1376274A1 |
| Устройство для считывания и обработки изображений | 1988 |
|
SU1513486A1 |
| СПОСОБ ОБРАБОТКИ ИНФОРМАЦИИ В ЛАЗЕРНОМ КОГЕРЕНТНОМ ЛОКАТОРЕ С МАТРИЧНЫМ ФОТОПРИЕМНИКОМ | 2007 |
|
RU2354994C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕНТРА ТЯЖЕСТИ ИЗОБРАЖЕНИЯ | 1987 |
|
RU2013029C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ТОЧЕЧНОЙ ЦЕЛИ ОПТИКО-ЭЛЕКТРОННЫМ ПРИБОРОМ | 2009 |
|
RU2420761C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПОКАЗАТЕЛЯ ОСЛАБЛЕНИЯ ОПТИЧЕСКОГО ИЗЛУЧЕНИЯ АЭРОЗОЛЬНОЙ СРЕДОЙ | 2023 |
|
RU2813558C1 |
| Устройство для считывания изображений | 1986 |
|
SU1429142A1 |
| СПОСОБ ВЫДЕЛЕНИЯ ЦЕНТРА ИЗОБРАЖЕНИЯ ОБЪЕКТА ИЗЛУЧЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2148248C1 |
Изобретение относится к области обработки оптических сигналов. Техническим результатом является повышение точности определения координат центра тяжести оптического изображения. Сущность способа определения координат центра тяжести оптического изображения заключается в проецировании оптического сигнала на фотоприемную матрицу приемника размерам M×N фотоэлементов, координатной привязке номеров фотоэлементов, преобразовании оптического сигнала фотоприемной матрицей приемника в матрицу M×N выходных электрических сигналов, формировании среднего значения icp выходных электрических сигналов как  где ij - выходной электрический сигнал j-го фотоэлемента,
где ij - выходной электрический сигнал j-го фотоэлемента,  - номер фотоэлемента, определении уровня порога для выходных электрических сигналов как
- номер фотоэлемента, определении уровня порога для выходных электрических сигналов как  где Рлт - заданное значение вероятности ложной тревоги, Е() - выделение целой части из полученного значения в сторону уменьшения, осуществлении пороговой обработки выходных электрических сигналов фотоэлементов, формировании при ij≥γ электрического сигнала j-го фотоэлемента как ijγ=ij, формировании ij<γ электрического сигнала j-го фотоэлемента как ijγ=ij=0, определении номера фотоэлемента, имеющего максимальный выходной сигнал, как
где Рлт - заданное значение вероятности ложной тревоги, Е() - выделение целой части из полученного значения в сторону уменьшения, осуществлении пороговой обработки выходных электрических сигналов фотоэлементов, формировании при ij≥γ электрического сигнала j-го фотоэлемента как ijγ=ij, формировании ij<γ электрического сигнала j-го фотоэлемента как ijγ=ij=0, определении номера фотоэлемента, имеющего максимальный выходной сигнал, как  а координат центра тяжести изображения по координатам k-го фотоэлемента, отображении значения координат центра тяжести изображения. 2 ил.
а координат центра тяжести изображения по координатам k-го фотоэлемента, отображении значения координат центра тяжести изображения. 2 ил.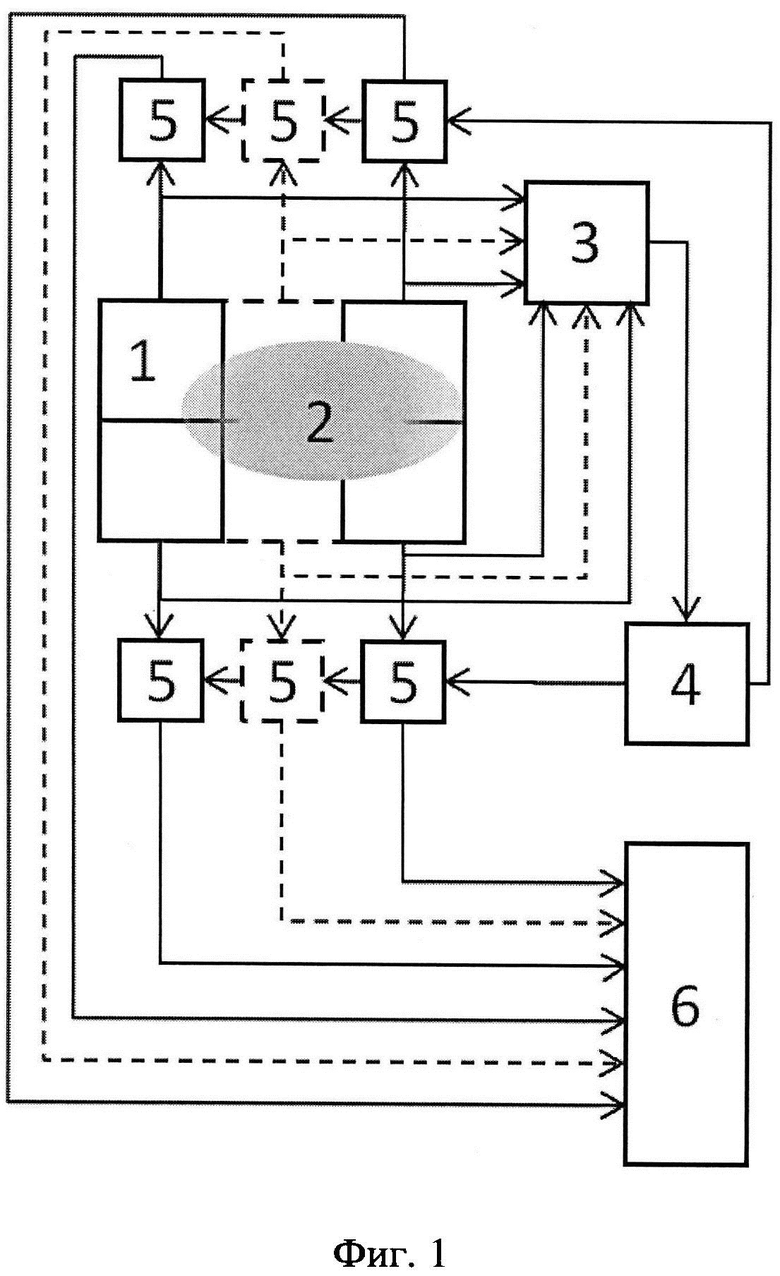
Способ определения координат центра тяжести оптического изображения, основанный на проецировании оптического сигнала на фотоприемную матрицу приемника размерам M×N фотоэлементов, координатной привязке номеров фотоэлементов, преобразовании оптического сигнала фотоприемной матрицей приемника в матрицу M×N выходных электрических сигналов, отличающийся тем, что формируют среднее значение icp выходных электрических сигналов как  где ij - выходной электрический сигнал j-го фотоэлемента,
где ij - выходной электрический сигнал j-го фотоэлемента,  - номер фотоэлемента, определяют уровень порога для выходных электрических сигналов как
- номер фотоэлемента, определяют уровень порога для выходных электрических сигналов как  где Рлт - заданное значение вероятности ложной тревоги, Е() - выделение целой части из полученного значения в сторону уменьшения, осуществляют пороговую обработку выходных электрических сигналов фотоэлементов, если ij≥γ, то формируют электрический сигнал j-го фотоэлемента как ijγ=ij, если ij<γ, то формируют электрический сигнал j-го фотоэлемента как ijγ=ij=0, определяют номер фотоэлемента, имеющего максимальный выходной сигнал, как
где Рлт - заданное значение вероятности ложной тревоги, Е() - выделение целой части из полученного значения в сторону уменьшения, осуществляют пороговую обработку выходных электрических сигналов фотоэлементов, если ij≥γ, то формируют электрический сигнал j-го фотоэлемента как ijγ=ij, если ij<γ, то формируют электрический сигнал j-го фотоэлемента как ijγ=ij=0, определяют номер фотоэлемента, имеющего максимальный выходной сигнал, как  а координаты центра тяжести изображения по координатам k-го фотоэлемента, отображают значение координат центра тяжести изображения.
а координаты центра тяжести изображения по координатам k-го фотоэлемента, отображают значение координат центра тяжести изображения.
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕНТРА ТЯЖЕСТИ ИЗОБРАЖЕНИЯ | 2013 |
|
RU2550523C2 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕНТРА ТЯЖЕСТИ ИЗОБРАЖЕНИЯ | 1987 |
|
RU2013029C1 |

