ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
1. Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к системе управления транспортным средством, сконфигурированной для управления транспортным средством. В частности, настоящее изобретение относится к системе управления транспортным средством, сконфигурированной для управления движением транспортного средства на основе целевой траектории.
2. Раскрытие предшествующего уровня техники
[0002] В японской нерассмотренной патентной заявке № 2018-024295 (JP 2018-024295 A) раскрыта система помощи при вождении, сконфигурированная для помощи при вождении транспортного средства. Система помощи при вождении содержит блок изображений, блок генерирования целевой траектории, блок получения условия движения и блок управления. Блок изображений получает изображение, содержащее границы полосы, по которой движется транспортное средство. Блок генерирования целевой траектории генерирует на основе изображения целевую траекторию, по которой транспортное средство может двигаться по полосе. Блок получения условия движения получает на основе изображения условие движения транспортного средства по полосе. Блок управления осуществляет рулевое управление на основе целевой траектории и условий движения так, что транспортное средство следует по целевой траектории.
[0003] В японской нерассмотренной патентной заявке № 2009-157502 (JP 2009-157502 A) раскрыто устройство оценки курса, сконфигурированное для оценки курсов транспортного средства. Устройство оценки курса генерирует множество возможных курсов и оценивает курсы, используя два или более различных критериев оценки.
[0004] В японской нерассмотренной патентной заявке № 2007-230454 (JP 2007-230454 A) раскрыто устройство назначения курса, сконфигурированное для назначения требуемого курса определенного объекта. Устройство назначения курса оценивает возможные курсы множества объектов, включая определенный объект, и назначает курс определенного объекта на основе результатов оценки.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0005] Согласно технологии, раскрытой в заявке JP 2018-024295 A, рулевое управление осуществляется на основе целевой траектории, сгенерированной блоком генерирования целевой траектории. В случае неисправности блока генерирования целевой траектории соответствующая целевая траектория не генерируется. Без соответствующей целевой траектории движение транспортного средства может быть небезопасно. Существует возможность усовершенствования управления движением транспортного средства на основе целевой траектории.
[0006] Настоящее изобретение предлагает технологию, способствующую обеспечению безопасности при управлении движением автомобиля на основе целевой траектории.
[0007] Один аспект настоящего изобретение относится к системе управления транспортным средством, содержащей одно или несколько устройств генерирования целевой траектории и устройство управления движением транспортного средства. Одно или несколько устройств генерирования целевой траектории сконфигурированы для генерирования и вывода целевых траекторий, каждая из которых содержит целевое местоположение и целевую скорость транспортного средства. Устройство управления движением транспортного средства сконфигурировано для получения целевых траекторий, выводимых с одного или нескольких устройств генерирования целевой траектории, и осуществления управления движением транспортного средства для управления движением транспортного средства на основе полученных целевых траекторий. Первая целевая траектория представляет собой целевую траекторию как минимум для одного из следующих видов управления: рулевое управление, ускорение и замедление транспортного средства. Вторая целевая траектория представляет собой целевую траекторию для замедления и остановки транспортного средства. Среди одного или нескольких устройств генерирования целевой траектории может быть неисправное устройство, которое представляет собой устройство генерирования целевой траектории, имеющее неисправность. Устройство управления движением транспортного средства сконфигурировано для управления движением транспортного средства на основе первой целевой траектории, выводимой с одного или нескольких устройств генерирования целевой траектории, когда неисправное устройство отсутствует. Устройство управления движением транспортного средства сконфигурировано для остановки транспортного средства посредством осуществления управления движением транспортного средства на основе второй целевой траектории, выведенной одним или несколькими устройствами генерирования целевой траектории до того, как произошла неисправность, или на основе второй целевой траектории, выводимой устройством генерирования целевой траектории, отличающегося от неисправного устройства среди устройств генерирования целевой траектории, когда неисправное устройство существует.
[0008] Согласно аспекту настоящего изобретения устройство генерирования целевой траектории генерирует и выводит не только первую целевую траекторию, но и вторую целевую траекторию. Вторая целевая траектория представляет собой целевую траекторию для замедления и остановки транспортного средства. Когда неисправное устройство существует, устройство управления движением транспортного средства осуществляет управление движением транспортного средства на основе второй целевой траектории, выведенной устройством генерирования целевой траектории до того, как произошла неисправность, или на основе второй целевой траектории, выводимой устройством генерирования целевой траектории, отличающегося от неисправного устройства среди устройств генерирования целевой траектории. Устройство управления движением транспортного средства замедляет и останавливает транспортное средство путем осуществления управления движением транспортного средства на основе второй целевой траектории. Таким образом обеспечивают безопасность транспортного средства.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0009] Отличительные признаки, преимущества, техническая и промышленная значимость примеров осуществления настоящего изобретения раскрыты ниже со ссылкой на сопроводительные чертежи, в которых одинаковые обозначения относятся к одинаковым элементам:
ФИГ. 1 представляет собой концептуальную схему для описания общего вида системы управления транспортным средством согласно первому варианту осуществления настоящего изобретения;
ФИГ. 2 представляет собой блок-схему, в общих чертах иллюстрирующую конфигурацию системы управления транспортным средством в соответствии с первым вариантом осуществления настоящего изобретения;
ФИГ. 3 представляет собой концептуальную схему для раскрытия второй целевой траектории согласно первому варианту осуществления настоящего изобретения;
ФИГ. 4 представляет собой концептуальную схему для раскрытия управления движением транспортного средства, которое должно осуществляться системой управления транспортным средством в соответствии с первым вариантом осуществления настоящего изобретения;
ФИГ. 5 представляет собой блок-схему, иллюстрирующую пример конфигурации устройства генерирования целевой траектории системы управления транспортным средством в соответствии с первым вариантом осуществления настоящего изобретения;
ФИГ. 6 представляет собой блок-схему, иллюстрирующую примеры устройства получения информации и данных о дорожной обстановке устройством генерирования целевой траектории в соответствии с первым вариантом осуществления настоящего изобретения;
ФИГ. 7 представляет собой схему, иллюстрирующую пример конфигурации устройства управления движением транспортного средства системы управления транспортным средством в соответствии с первым вариантом осуществления настоящего изобретения;
ФИГ. 8 представляет собой блок-схему, иллюстрирующую сущность процесса, который должен быть выполнен системой управления транспортным средством в соответствии с первым вариантом осуществления настоящего изобретения;
ФИГ. 9 представляет собой схему, иллюстрирующую конфигурацию системы управления транспортным средством в соответствии со вторым вариантом осуществления настоящего изобретения;
ФИГ. 10 представляет собой концептуальную схему для раскрытия управления движением транспортного средства, которое должно осуществляться системой управления транспортным средством в соответствии со вторым вариантом осуществления настоящего изобретения;
ФИГ. 11 представляет собой схему, иллюстрирующую конфигурацию системы управления транспортным средством в соответствии с третьим вариантом осуществления настоящего изобретения;
ФИГ. 12 представляет собой концептуальную схему для раскрытия траектории аварийного режима согласно третьему варианту осуществления настоящего изобретения;
ФИГ. 13 представляет собой схему, иллюстрирующую конфигурацию системы управления транспортным средством в соответствии с четвертым вариантом осуществления настоящего изобретения;
ФИГ. 14 представляет собой концептуальную схему для раскрытия траектории режима помощи при передвижении согласно четвертому варианту осуществления настоящего изобретения;
ФИГ. 15 представляет собой концептуальную схему для раскрытия траектории аварийного останова согласно четвертому варианту осуществления настоящего изобретения;
ФИГ. 16 представляет собой концептуальную схему для раскрытия правил управления движением транспортного средства, которое должно осуществляться системой управления транспортным средством в соответствии с четвертым вариантом осуществления настоящего изобретения;
ФИГ. 17 представляет собой временную диаграмму для раскрытия первого примера управления движением транспортного средства, которое должно осуществляться системой управления транспортным средством в соответствии с четвертым вариантом осуществления настоящего изобретения;
ФИГ. 18 представляет собой временную диаграмму для раскрытия второго примера управления движением транспортного средства, которое должно осуществляться системой управления транспортным средством в соответствии с четвертым вариантом осуществления настоящего изобретения;
ФИГ. 19 представляет собой временную диаграмму для раскрытия третьего примера управления движением транспортного средства, которое должно осуществляться системой управления транспортным средством в соответствии с четвертым вариантом осуществления настоящего изобретения;
ФИГ. 20 представляет собой временную диаграмму для раскрытия четвертого примера управления движением транспортного средства, которое должно осуществляться системой управления транспортным средством в соответствии с четвертым вариантом осуществления настоящего изобретения;
ФИГ. 21 представляет собой временную диаграмму для раскрытия пятого примера управления движением транспортного средства, которое должно осуществляться системой управления транспортным средством в соответствии с четвертым вариантом осуществления настоящего изобретения;
ФИГ. 22 представляет собой временную диаграмму для раскрытия шестого примера управления движением транспортного средства, которое должно осуществляться системой управления транспортным средством в соответствии с четвертым вариантом осуществления настоящего изобретения;
ФИГ. 23 представляет собой временную диаграмму для раскрытия седьмого примера управления движением транспортного средства, которое должно осуществляться системой управления транспортным средством в соответствии с четвертым вариантом осуществления настоящего изобретения;
ФИГ. 24 представляет собой временную диаграмму для раскрытия восьмого примера управления движением транспортного средства, которое должно осуществляться системой управления транспортным средством в соответствии с четвертым вариантом осуществления настоящего изобретения;
ФИГ. 25 представляет собой схему, иллюстрирующую конфигурацию системы управления транспортным средством в соответствии с пятым вариантом осуществления настоящего изобретения; и
ФИГ. 26 представляет собой временную диаграмму для раскрытия примера управления движением транспортного средства, которое должно осуществляться системой управления транспортным средством в соответствии с пятым вариантом осуществления настоящего изобретения.
ПОДРОБНОЕ РАСКРЫТИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
[0010] Варианты осуществления настоящего изобретения раскрыты со ссылкой на соответствующие чертежи.
1. Первый вариант осуществления изобретения
1-1. Обзор системы управления транспортным средством
[0011] ФИГ. 1 представляет собой концептуальную схему для описания общего вида системы управления 10 транспортным средством согласно первому варианту осуществления. Система управления 10 транспортным средством управляет транспортным средством 1. Система управления 10 транспортным средством обычно установлена на транспортном средстве 1. В качестве альтернативы как минимум часть системы управления 10 транспортным средством может быть расположена во внешнем устройстве за пределами транспортного средства 1 для удаленного управления транспортным средством 1. Т.е. система управления 10 транспортным средством может быть распределена между транспортным средством 1 и внешним устройством.
[0012] Система управления 10 транспортным средством осуществляет «управление движением транспортного средства» для управления движением транспортного средства 1 (рулевое управление, ускорение и замедление). В частности, система управления 10 транспортным средством осуществляет управление движением транспортного средства на основе целевой траектории TR.
[0013] Целевая траектория TR включает в себя целевое местоположение [X(t), Y(t)] и целевую скорость [VX(t), VY(t)] транспортного средства 1 на дороге, по которой движется транспортное средство 1. В примере, показанном на ФИГ. 1, направление X является направлением транспортного средства 1 вперед, а направление Y является направлением в плоскости, перпендикулярной направлению X. Система координат (X, Y) не ограничена примером, показанным на ФИГ. 1. Целевое местоположение [X(t), Y(t)] и целевая скорость [VX(t), VY(t)] являются функциями времени t. Целевая скорость [VX(t), VY(t)] может быть задана для каждого целевого местоположения [X(t), Y(t)]. Т.е. целевое местоположение [X(t), Y(t)] и целевая скорость [VX(t), VY(t)] могут быть связаны друг с другом. Система управления 10 транспортным средством осуществляет управление движением транспортного средства так, что транспортное средство 1 следует целевой траектории TR.
[0014] ФИГ. 2 представляет собой схему, иллюстрирующую конфигурацию системы управления 10 транспортным средством в соответствии с данным вариантом осуществления. Система управления 10 транспортным средством содержит устройство 100 генерирования целевой траектории и устройство 200 управления движением транспортного средства. Устройство 100 генерирования целевой траектории и устройство 200 управления движением транспортного средства могут физически быть разными устройствами или одним и тем же устройством. Когда устройство 100 генерирования целевой траектории и устройство 200 управления движением транспортного средства являются физически разными устройствами, устройства обмениваются необходимой информацией посредством коммуникации.
[0015] Устройство 100 генерирования целевой траектории генерирует целевую траекторию TR. В частности, устройство 100 генерирования целевой траектории получает информацию 150 о дорожной обстановке, отображающую дорожную обстановку вокруг транспортного средства 1. Например, информация 150 о дорожной обстановке содержит картографическую информацию, информацию о местоположении и информацию об окружающих условиях. Информация о местоположении отображает сведения о местоположении и направлении движения транспортного средства 1. Информация об окружающих условиях отображает условия вокруг транспортного средства 1. Устройство 100 генерирования целевой траектории определяет план движения транспортного средства 1 на основе информации 150 о дорожной обстановке и генерирует целевую траекторию TR, необходимую для достижения плана движения. Примеры плана движения содержат план сохранения текущей полосы движения, план смены полосы, план избегания препятствий и план замедления и остановки. Обычно устройство 100 генерирования целевой траектории повторно генерирует целевую траекторию TR в каждом заранее определенном цикле, т.е. обновляет целевую траекторию TR. Устройство 100 генерирования целевой траектории выводит сгенерированную (обновленную) целевую траекторию TR на устройство 200 управления движением транспортного средства.
[0016] Устройство 200 управления транспортного средства осуществляет управление движением транспортного средства для управления движением транспортного средства 1 (рулевое управление, ускорение и замедление). В частности, устройство 200 управления движением транспортного средства получает целевой траектории TR, выводимую устройством 100 генерирования целевой траектории, и осуществляет управление движением транспортного средства на основе полученной целевой траектории. Обычно устройство 200 управления движением транспортного средства осуществляет управление движением транспортного средства так, что транспортное средство 1 следует целевой траектории TR. Поэтому устройство 200 управления движением транспортного средства рассчитывает отклонения между транспортным средством 1 и целевой траекторией TR (такие как боковое отклонение, отклонение угла рыскания и отклонение скорости) и осуществляет управление движением транспортного средства так, что отклонение снижается.
[0017] Согласно данному варианту осуществления используют два типа целевой траектории TR, т.е. «первую целевую траекторию TR1» и «вторую целевую траекторию TR2». Первая целевая траектория TR1 — это целевая траектория TR как минимум для одного из следующих видов управления: рулевое управление, ускорение и замедление транспортного средства 1. Например, первая целевая траектория TR1 — это целевая траектория TR для непрерывного автономного вождения транспортного средства 1 вдоль полосы движения. Вторая целевая траектория TR2 — это целевая траектория TR для замедления и остановки транспортного средства 1.
[0018] ФИГ. 3 представляет собой концептуальную схему для раскрытия второй целевой траектории TR2. Горизонтальная ось представляет собой время t, а вертикальная ось представляет собой целевую скорость [VX(t), VY(t)]. Как показано на ФИГ. 3, целевая скорость [VX(t), VY(t)] снижается с течением времени t и в итоге достигает нуля. Транспортное средство 1 замедляется и останавливается, осуществляя управление движением транспортного средства на основе второй целевой траектории TR2. Вторая целевая траектория TR2 может потребовать рулевого управления в дополнение к замедлению. Например, вторая целевая траектория TR2 может быть сгенерирована таким образом, что транспортное средство 1 будет двигаться в сторону обочины дороги и остановится около нее в аварийном режиме.
[0019] Устройство 100 генерирования целевой траектории генерирует и выводит первую целевую траекторию TR1 и вторую целевую траекторию TR2. Устройство 200 управления движением транспортного средства получает и хранит первую целевую траекторию TR1 и вторую целевую траекторию TR2. Устройство 200 управления движением транспортного средства осуществляет управление движением транспортного средства на основе как минимум первой целевой траектории TR1 и второй целевой траектории TR2.
[0020] В частности, устройство 200 управления движением транспортного средства в соответствии с данным вариантом осуществления выборочно использует первую целевую траекторию TR1 и вторую целевую траекторию TR2 в зависимости от того, имеет ли устройство 100 генерирования целевой траектории неисправности. В случае неисправности устройства 100 генерирования целевой траектории соответствующая целевая траектория TR не выводится устройством 100 генерирования целевой траектории. Например, генерирование (обновление) и вывод целевой траектории TR останавливается, когда устройство 100 генерирования целевой траектории неисправно. Даже если целевая траектория TR генерируется и выводится, целевая траектория TR не является соответствующей.
[0021] Сначала предполагается, что устройство 100 генерирования целевой траектории в нормальном состоянии (не имеет неисправностей). В этом случае устройство 100 генерирования целевой траектории генерирует и выводит первую целевую траекторию TR1 и вторую целевую траекторию TR2. Устройство 200 управления движением транспортного средства осуществляет управление движением транспортного средства на основе первой целевой траектории TR1. Т.е. устройство 200 управления движением транспортного средства осуществляет управление движением транспортного средства так, что транспортное средство 1 следует первой целевой траектории TR1.
[0022] Затем согласно ФИГ. 4 предполагается, что устройство 100 генерирования целевой траектории неисправно. Неисправное устройство 100 генерирования целевой траектории далее будет обозначено как «неисправное устройство 100F». После того как возникнет неисправность, соответствующая траектория TR не будет выводиться с неисправного устройства 100F. Без соответствующей целевой траектории TR движение транспортного средства может быть небезопасно.
[0023] Согласно данному варианту осуществления, когда существует неисправное устройство 100F, используют соответствующую вторую целевую траекторию TR2, выведенную до возникновения неисправности. Т.е. устройство 200 управления движением транспортного средства осуществляет управление движением транспортного средства на основе второй целевой траектории TR2, выведенной устройством 100 генерирования целевой траектории до того, как произошла неисправность. Транспортное средство 1 замедляется и останавливается, осуществляя управление движением транспортного средства на основе второй целевой траектории TR2. Таким образом обеспечивают безопасность транспортного средства 1.
[0024] Вторую целевую траекторию TR2 можно рассматривать как «распоряжение на случай смерти», подготовленное устройством 100 генерирования целевой траектории на случай неисправности. Устройство 200 управления движением транспортного средства предварительно получает и хранит такое распоряжение, выведенное устройством 100 генерирования целевой траектории перед тем, как произошла неисправность. Когда происходит неисправность устройства 100 генерирования целевой траектории, устройство 200 управления движением транспортного средства осуществляет предварительно полученное распоряжение для остановки транспортного средства 1. Таким образом обеспечивают безопасность транспортного средства 1.
[0025] Дорожная обстановка вокруг транспортного средства 1 постоянно меняется. Когда происходит неисправность устройства 100 генерирования целевой траектории, предпочтительно использовать как можно более новую вторую целевую траекторию TR2. Однако время неисправности устройства 100 генерирования целевой траектории не известно заранее. Поэтому целесообразно, что устройство 100 генерирования целевой траектории «непрерывно» обновляет и выводит как минимум вторую целевую траекторию TR2. Термин «непрерывно» здесь одновременно означает «постоянно» и «периодически». Например, вывод второй целевой траектории TR2 может быть приостановлен на короткое время. В этом случае все равно можно сказать, что вывод второй целевой траектории TR2 является постоянным в течение длительного периода.
[0026] Уместно, что устройство 200 управления движением транспортного средства осуществляет управление движением транспортного средства на основе последнего вывода второй целевой траектории TR2 устройством 100 генерирования целевой траектории в последний раз перед тем, как произошла неисправность. Транспортное средство 1 может быть остановлено более подходящим образом, так как последняя вторая целевая траектория TR2 отражает последнюю дорожную обстановку.
[0027] Последняя вторая целевая траектория TR2 по существу не должна использоваться. Например, достаточный эффект также может быть достигнут, когда используется вторая целевая траектория TR2, генерируемая в предыдущем цикле для последнего цикла. Устройство 200 управления движением транспортного средства содержит запоминающее устройство, которое хранит в течение заранее определенного периода времени вторую целевую траекторию, выведенную TR2 устройством 100 генерирования целевой траектории. Когда происходит неисправность устройства 100 генерирования целевой траектории, устройство 200 управления движением транспортного средства осуществляет управление движением транспортного средства путем использования относительно новой второй целевой траектории TR2 среди вторых целевых траекторий TR2, выведенных перед тем, как произошла неисправность. Таким образом, транспортное средство 1 может быть остановлено, и может быть обеспечена безопасность.
[0028] Система управления 10 транспортным средством в соответствии с данным вариантом осуществления более подробно раскрыта ниже.
1-2. Примеры конфигурации
1-2-1. Устройство 100 генерирования целевой траектории
[0029] ФИГ. 5 представляет собой схему, иллюстрирующую пример конфигурации устройства 100 генерирования целевой траектории в соответствии с данным вариантом осуществления изобретения. Устройство 100 генерирования целевой траектории содержит устройство 110 получения информации, устройство 120 управления и интерфейс 130 ввода и вывода.
[0030] Устройство 110 получения информации получает информацию 150 о дорожной обстановке, отображающую дорожную обстановку вокруг транспортного средства 1.
[0031] ФИГ. 6 представляет собой блок-схему, иллюстрирующую примеры устройства 110 получения информации и информации 150 о дорожной обстановке. Устройство 110 получения информации содержит устройство 111 получения картографической информации, устройство 112 получения информации о местоположении, датчик 113 состояния транспортного средства, датчик 114 окружающих условий и устройство 115 связи. Информация 150 о дорожной обстановке содержит картографическую информацию 151, информацию 152 о местоположении, информацию 153 о состоянии транспортного средства, информацию 154 об окружающих условиях и информацию 155 о ситуации.
[0032] Устройство 111 получения картографической информации получает картографическую информацию 151. Картографическая информация 151 отображает расположение полос и форму дорог. Устройство 111 получения картографической информации получает картографическую информацию 151 для необходимой области из базы картографических данных. База картографических данных может храниться в предварительно определенном запоминающем устройстве, установленном на транспортном средстве 1, или на сервере управления за пределами транспортного средства 1. В последнем случае устройство 111 получения картографической информации связывается с сервером управления для получения необходимой картографической информации 151.
[0033] Устройство 112 получения информации о местоположении получает информацию 152 о местоположении, показывающую местоположение и направление движения транспортного средства 1. Например, устройство 112 получения информации о местоположении содержит устройство глобальной системы позиционирования (GPS), сконфигурированное для определения местоположения и направления движения транспортного средства 1. Устройство 112 получения информации о местоположении может повысить точность информации 152 о местоположении за счет известного процесса оценки самопозиционирования (локализации).
[0034] Датчик 113 состояния транспортного средства получает информацию 153 о состоянии транспортного средства, отображающую параметры состояния транспортного средства 1. Например, датчик 113 состояния транспортного средства содержит датчик скорости транспортного средства, датчик скорости рыскания, датчик ускорения и датчик угла поворота рулевого колеса. Датчик скорости транспортного средства определяет скорость транспортного средства (скорость транспортного средства 1). Датчик скорости рыскания определяет скорость рыскания транспортного средства 1. Датчик ускорения определяет ускорение транспортного средства 1 (поперечное ускорение, продольное ускорение и вертикальное ускорение). Датчик угла поворота рулевого колеса определяет угол поворота рулевого колеса (управляемый угол) транспортного средства 1.
[0035] Датчик 114 окружающих условий распознает (определяет) условия вокруг транспортного средства 1. Например, датчик 114 окружающих условий содержит как минимум одну камеру, лазерный радар и радар. Информация 154 об окружающих условиях отображает результат распознавания датчиком 114 окружающих условий. Например, информация 154 об окружающих условиях содержит целевую информацию, относящуюся к цели, распознанной датчиком 114 окружающих условий. Примеры цели содержат окружающие транспортные средства, пешеходов, объекты на обочине дороги, препятствия и линию полосы движения (линию маркировки полосы). целевая информация содержит информацию об относительном местоположении и относительной скорости цели относительно транспортного средства 1.
[0036] Устройство 115 связи осуществляет связь за пределами транспортного средства 1. Например, устройство 115 связи связывается с внешним устройством за пределами транспортного средства 1 посредством коммуникационной сети. Устройство 115 связи может устанавливать связь транспортное средство-инфраструктура (V2I) с окружающей инфраструктурой. Устройство 115 связи может устанавливать связь транспортное средство-транспортное средство (V2V) с окружающими транспортными средствами. Информацию 155 о ситуации получают посредством устройства 115 связи. Например, информация 155 о ситуации содержит информацию об окружающих транспортных средствах и о дорожной обстановке.
[0037] Часть устройства 110 получения информации может содержаться в устройстве 200 управления движением транспортного средства. Т.е. устройство 100 генерирования целевой траектории и устройство 200 управления движением транспортного средства могут содержать часть устройства 110 получения информации. В этом случае устройство 100 генерирования целевой траектории и устройство 200 управления движением транспортного средства обмениваются необходимой информацией.
[0038] Как видно на ФИГ. 5, интерфейс 130 ввода и вывода соединен с возможностью связи с устройством 200 управления движением транспортного средства. Например, интерфейс 130 ввода и вывода содержит устройство связи.
[0039] Устройство 120 управления (контроллер) является устройством обработки информации, выполненным с возможностью осуществления различных процессов. Например, устройство 120 управления является микрокомпьютером. Устройство 120 управления также называют электронным блоком управления (ECU). Устройство 120 управления содержит процессор 121 и запоминающее устройство 122.
[0040] Запоминающее устройство 122 хранит различные типы информации. Примеры запоминающих устройств 122 содержат энергозависимую память и энергонезависимую память.
[0041] Процессор 121 выполняет компьютерные программы. Компьютерные программы хранятся в запоминающем устройстве 122 или записаны на машиночитаемом носителе информации. Процессор 121 выполняет компьютерные программы для осуществления функций устройства 120 управления (процессор 121).
[0042] Устройство 120 управления повторно получает информацию 150 о дорожной обстановке от устройства 110 получения информации. Полученная информация 150 о дорожной обстановке хранится в запоминающем устройстве 122.
[0043] Устройство 120 управления определяет план движения транспортного средства 1 на основе информации 150 о дорожной обстановке и генерирует целевые траектории TR, необходимые для достижения плана движения. Примеры плана движения содержат план сохранения текущей полосы движения, план смены полосы, план избегания препятствий и план замедления и остановки. Обычно устройство 120 управления повторно генерирует целевые траектории TR в каждом заранее определенном цикле, т.е. обновляет целевые траектории TR. Сгенерированные целевые траектории TR (первая целевая траектория TR1 и вторая целевая траектория TR2) хранятся в запоминающем устройстве 122.
[0044] Устройство 120 управления выводит сгенерированные (обновленные) целевые траектории TR на устройство 200 управления движением транспортного средства посредством интерфейса 130 ввода и вывода.
1-2-2. Устройство 200 управления движением транспортного средства
[0045] ФИГ. 7 представляет собой блок-схему, иллюстрирующую пример конфигурации устройства 200 управления движением транспортного средства в соответствии с данным вариантом осуществления изобретения. Устройство 200 управления движением транспортного средства содержит устройство 210 получения состояния движения, устройство 220 управления, интерфейс 230 ввода и вывода и устройство 240 движения.
[0046] Устройство 210 получения состояния движения получает информацию 250 о состоянии движения, отображающую условия движения транспортного средства 1. Примеры параметров состояния движения содержат местоположение, направление, скорость транспортного средства, скорость рыскания, ускорение и угол поворота рулевого колеса (управляемый угол) транспортного средства 1. Например, устройство 210 получения состояния движения получает информацию о местоположении, отображающую местоположение и направление транспортного средства 1, путем использования устройства GPS. Устройство 210 получения состояния движения может повысить точность информации о местоположении за счет известного процесса оценки самопозиционирования. Устройство 210 получения состояния движения содержит датчик скорости транспортного средства, датчик скорости рыскания, датчик ускорения и датчик угла поворота рулевого колеса. Как минимум часть устройства 210 получения состояния движения может быть общей с устройством 110 получения информации устройства 100 генерирования целевой траектории.
[0047] Интерфейс 230 ввода и вывода соединен с возможностью связи с устройством 100 генерирования целевой траектории. Например, интерфейс 230 ввода и вывода содержит устройство связи.
[0048] Устройство 240 движения содержит систему 241 рулевого управления, приводное устройство 242 и тормозное устройство 243. Система 241 рулевого управления поворачивает колеса транспортного средства 1. Примеры системы 241 рулевого управления содержат систему электроусилителя руля (EPS). Приводное устройство 242 является источником питания, сконфигурированным для генерирования движущей силы. Примеры приводного устройства 242 содержат двигатель, электродвигатель и внутриколесный мотор. Тормозное устройство 243 генерирует тормозное усилие.
[0049] Устройство 220 управления (контроллер) является устройством обработки информации, сконфигурированным для осуществления различных процессов. Например, устройство 220 управления является микрокомпьютером. Управляющее устройство 220 также называют электронным блоком управления (ECU). Устройство 220 управления содержит процессор 221 и запоминающее устройство 222.
[0050] Запоминающее устройство 222 хранит различные типы информации. Примеры запоминающих устройств 222 содержат энергозависимую память и энергонезависимую память.
[0051] Процессор 221 выполняет компьютерные программы. Компьютерные программы хранятся в запоминающем устройстве 222 или записаны на машиночитаемом носителе информации. Процессор 221 выполняет компьютерные программы для осуществления функций устройства 220 управления (процессор 221).
[0052] Например, устройство 220 управления осуществляет «управление движением транспортного средства» для рулевого управления, управления ускорением и замедлением транспортного средства 1. Устройство 220 управления осуществляет управление движением транспортного средства посредством управления работой устройства 240 движения. В частности, устройство 220 управления осуществляет рулевое управление (поворот) транспортным средством 1 путем управления работой системой 241 рулевого управления. Устройство 220 управления управляет ускорением транспортного средства 1 путем управления работой приводного устройства 242. Устройство 220 управления управляет замедлением транспортного средства 1 путем управления работой тормозного устройства 243.
[0053] Устройство 220 управления повторно получает информацию 250 о состоянии движения от устройства 210 получения состояния движения. Полученная информация 250 о состоянии движения хранится в запоминающем устройстве 222.
[0054] Устройство 220 управления получает посредством интерфейса 230 ввода и вывода целевые траектории TR, выводимые из устройства 100 генерирования целевой траектории. Полученные целевые траектории TR (первая целевая траектория TR1 и вторая целевая траектория TR2) хранятся в запоминающем устройстве 222. После обновления целевых траекторий TR предыдущие целевые траектории TR (в частности, предыдущая вторая целевая траектория TR2) могут храниться в запоминающем устройстве 222 в течение заранее определенного периода.
[0055] Устройство 220 управления осуществляет управление движением транспортного средства на основе целевой траектории TR. В частности, устройство 220 управления осуществляет управление движением транспортного средства так, что транспортное средство 1 следует целевой траектории TR. Таким образом, устройство 220 управления рассчитывает отклонения между транспортным средством 1 и целевой траекторией TR на основе целевой траектории TR и информации 250 о состоянии движения. Примеры отклонений содержат боковое отклонение (отклонение в направлении Y), отклонение угла рыскания (отклонение угла азимута) и отклонение скорости. Устройство 220 управления осуществляет управление движением транспортного средства так, что отклонения между транспортным средством 1 и целевой траекторией TR уменьшаются. Путем управления движением транспортного средства транспортное средство 1 движется в соответствии с целевой траекторией TR.
[0056] Например, рулевое управление с использованием системы 241 рулевого управления осуществляется следующим образом. Устройство 220 управления рассчитывает целевую скорость рыскания для уменьшения отклонения между транспортным средством 1 и целевой траекторией TR. Фактическая скорость рыскания содержится в информации 250 о состоянии движения. Устройство 220 управления рассчитывает целевой угол поворота рулевого колеса в зависимости от отклонения скорости рыскания, которое представляет собой разницу между целевой скоростью рыскания и фактической скоростью рыскания. С увеличением отклонения скорости рыскания увеличивается целевой угол поворота рулевого колеса. Фактический угол поворота рулевого колеса содержится в информации 250 о состоянии движения. Устройство 220 управления осуществляет управление обратной связью для системы 241 рулевого управления так, что фактический угол поворота рулевого колеса равен целевому углу поворота рулевого колеса.
1-3. Пример способа обнаружения неисправности
[0057] Ниже представлены примеры неисправностей в устройстве 100 генерирования целевой траектории.
Неисправность ввода. Информация 150 о дорожной обстановке, необходимая для генерирования целевой траектории TR, не может быть получена надлежащим образом в связи с неисправностью или сбоем в устройстве (датчике) 110 получения информации.
Неисправность в вычислительном процессе. Вычислительный процесс для генерирования целевой траектории TR не осуществляется надлежащим образом в связи с неисправностью или сбоем в устройстве 120 управления.
Неисправность в результате расчета. Сгенерированная целевая траектория TR не удовлетворяет заранее определенному требованию.
Неисправность вывода. Целевая траектория TR не выводится надлежащим образом устройством 100 генерирования целевой траектории в связи с неисправностью или сбоем в функции вывода интерфейса 130 ввода и вывода.
[0058] Устройство 100 генерирования целевой траектории имеет функцию самодиагностики. Ниже приведены примеры пунктов, которые должны быть проверены посредством применения функции самодиагностики.
Пункт 1. Устройство 120 управления работает надлежащим образом (например, расчетный период процессора 121 соответствует нормальному диапазону).
Пункт 2. Датчики устройства 110 получения информации работают надлежащим образом (например, периоды считывания, счетчики обнаруженных данных и значения обнаруженных данных соответствуют нормальным диапазонам).
Пункт 3. Устройство 120 управления успешно получает информацию 150 о дорожной обстановке (например, период получения и количество данных соответствуют нормальным диапазонам).
Пункт 4. Результат расчета целевой траектории TR нормальный (например, количество данных и значения данных соответствуют нормальным диапазонам).
Пункт 5. Целевая траектория TR надлежащим образом выводится с интерфейса 130 ввода и вывода (например, период передачи и количество данных соответствуют нормальным диапазонам).
[0059] При обнаружении неисправности в любой позиции функция самодиагностики определяет, что устройство 100 генерирования целевой траектории неисправно. Когда функция самодиагностики определяет, что произошла неисправность, функция самодиагностики выводит наружу сигнал ошибки посредством соответствующей сигнальной линии. При получении сигнала ошибки устройство 200 управления движением транспортного средства может распознать неисправность в устройстве 100 генерирования целевой траектории.
1-4. Последовательность обработки
[0060] ФИГ. 8 представляет собой блок-схему, иллюстрирующую сущность процесса, который должен быть выполнен системой управления 10 транспортным средством в соответствии с вариантом осуществления.
[0061] На этапе S100 устройство 100 генерирования целевой траектории получает информацию 150 о дорожной обстановке. Устройство 100 генерирования целевой траектории генерирует (обновляет) целевые траектории TR на основе информации 150 о дорожной обстановке. Устройство 100 генерирования целевой траектории выводит сгенерированные (обновленные) целевые траектории TR на устройство 200 управления движением транспортного средства.
[0062] На этапе S200 устройство 200 управления движением транспортного средства получает вывод целевых траекторий TR от устройства 100 генерирования целевой траектории. Устройство 200 управления движением транспортного средства хранит полученные целевые траектории TR в запоминающем устройстве 222.
[0063] На этапе S300 устройство 200 управления движением транспортного средства определяет, неисправно ли устройство 100 генерирования целевой траектории. Например, устройство 200 управления движением транспортного средства определяет, выводится ли сигнал ошибки устройством 100 генерирования целевой траектории. Когда устройство 100 генерирования целевой траектории не имеет неисправностей, т.е. когда неисправное устройство 100F не существует (шаг S300; Нет), процесс переходит к шагу S400. Когда устройство 100 генерирования целевой траектории имеет неисправность, т.е. когда неисправное устройство 100F существует (шаг S300; Да), процесс переходит к шагу S500.
[0064] На шаге S400 устройство 200 управления движением транспортного средства осуществляет управление движением транспортного средства на основе первой целевой траектории TR1. Т.е. устройство 200 управления движением транспортного средства осуществляет управление движением транспортного средства так, что транспортное средство 1 следует по первой целевой траектории TR1.
[0065] На шаге S500 устройство 200 управления движением транспортного средства осуществляет управление движением транспортного средства на основе второй целевой траектории TR2. Т.е. устройство 200 управления движением транспортного средства осуществляет управление движением транспортного средства так, что транспортное средство 1 следует по второй целевой траектории TR2. Таким образом, транспортное средство 1 замедляется и останавливается.
1-5. Технические результаты
[0066] Согласно раскрытому выше устройство 100 генерирования целевой траектории согласно данному варианту осуществления генерирует и выводит не только первую целевую траекторию TR1, но и вторую целевую траекторию TR2. Вторая целевая траектория TR2 — это целевая траектория TR для замедления и остановки транспортного средства 1. Когда существует неисправное устройство 100F, устройство 200 управления движением транспортного средства осуществляет управление движением транспортного средства на основе второй целевой траектории TR2, выведенной устройством 100 генерирования целевой траектории до того, как произошла неисправность. Транспортное средство 1 замедляется и останавливается при осуществлении управления движением транспортного средства на основе второй целевой траектории TR2. Таким образом обеспечивают безопасность транспортного средства 1. Данная операция способствует повышению надежности системы управления 10 транспортным средством.
2. Второй вариант осуществления изобретения
[0067] Во втором варианте осуществления существует множество устройств 100 генерирования целевой траектории. Описание, пересекающееся с первым вариантом осуществления изобретения, соответственно опущено.
2-1. Система управления транспортным средством
[0068] ФИГ. 9 представляет собой схему, иллюстрирующую конфигурацию системы управления 10 транспортным средством в соответствии со вторым вариантом осуществления изобретения. Система управления 10 транспортным средством содержит множество устройств 100-A и 100-B генерирования целевой траектории и устройство 200 управления движением транспортного средства.
[0069] Конфигурации устройств 100-A и 100-B аналогичны конфигурации устройства 100 генерирования целевой траектории, раскрытого в первом варианте осуществления (см. ФИГ. 5 и ФИГ. 6).
[0070] Что касается устройства 100-A, информация 150 о дорожной обстановке, целевая траектория TR, первая целевая траектория TR1 и вторая целевая траектория TR2, раскрытые в первом варианте осуществления, обозначены как информация 150-A о дорожной обстановке, целевая траектория TR-A, первая целевая траектория TR1-A и вторая целевая траектория TR2-A соответственно. Устройство 100-A генерирования целевой траектории генерирует и выводит целевые траектории TR-A (TR1-A и TR2-A) на основе информации 150-A о дорожной обстановке.
[0071] Что касается устройства 100-B, информация 150 о дорожной обстановке, целевая траектория TR, первая целевая траектория TR1 и вторая целевая траектория TR2, раскрытые в первом варианте осуществления, обозначены как информация 150-B о дорожной обстановке, целевая траектория TR-B, первая целевая траектория TR1-B и вторая целевая траектория TR2-B соответственно. Устройство 100-B генерирования целевой траектории генерирует и выводит целевые траектории TR-B (TR1-B и TR2-B) на основе информации 150-B о дорожной обстановке.
[0072] Конфигурация устройства 200 управления движением транспортного средства аналогична конфигурации в первом варианте осуществления (см. ФИГ. 7).
2-2. Управление движением транспортного средства
[0073] Устройство 200 управления движением транспортного средства получает целевые траектории TR-A (TR1-A и TR2-A), выводимые устройством 100-A генерирования целевой траектории. Устройство 200 управления движением транспортного средства также получает целевые траектории TR-B (TR1-B и TR2-B), выводимые устройством 100-B генерирования целевой траектории. Устройство 200 управления движением транспортного средства хранит полученные целевые траектории TR (TR1-A, TR2-A, TR1-B и TR2-B) в запоминающем устройстве 222. Устройство 200 управления движением транспортного средства осуществляет управление движением транспортного средства на основе как минимум одной целевой траектории TR.
[0074] Во-первых, предполагается, что оба устройства 100-A и 100-B генерирования целевой траектории в нормальном состоянии, т.е. неисправное устройство 100F не существует. В этом случае устройство 200 управления движением транспортного средства осуществляет управление движением транспортного средства на основе как минимум первых целевых траекторий TR1-A и TR1-B. Например, когда выводится первая целевая траектория TR1-A, но не выводится первая целевая траектория TR1-B, устройство 200 управления движением транспортного средства осуществляет управление движением транспортного средства на основе первой целевой траектории TR1-A.
[0075] В качестве другого примера, когда выводятся обе первые целевые траектории TR1-A и TR1-B, устройство 200 управления движением транспортного средства выбирает первую целевую траекторию TR1-A или TR1-B и осуществляет управление движением транспортного средства на основе выбранной первой целевой траектории. В качестве альтернативы устройство 200 управления движением транспортного средства может определять конечную целевую траекторию TR посредством комбинирования первых целевых траекторий TR1-A и TR1-B и осуществлять управление движением транспортного средства на основе конечной целевой траектории TR.
[0076] Затем, согласно ФИГ. 10 предполагается, что устройство 100-A или 100-B генерирования целевой траектории неисправно, т.е. неисправное устройство 100F существует. В примере, показанном на ФИГ. 10, устройство 100-A генерирования целевой траектории является неисправным устройством 100F. После того как возникнет неисправность, соответствующие целевые траектории TR-A (TR1-A и TR2-A) не выводятся устройством 100-A генерирования целевой траектории, т.е. неисправным устройством 100F. В этом случае устройство 200 управления движением транспортного средства осуществляет управление движением транспортного средства на основе второй целевой траектории TR2-A или TR2-B, чтобы остановить транспортное средство 1.
[0077] Например, устройство 200 управления движением транспортного средства осуществляет управление движением транспортного средства на основе второй целевой траектории TR2-A, выведенной устройством 100-А генерирования целевой траектории до того, как произошла неисправность. В качестве альтернативы устройство 200 управления движением транспортного средства осуществляет управление движением транспортного средства на основе второй целевой траектории TR2-B, выводимой устройством 100-B, отличающимся от неисправного устройства 100F. В любом случае управление движением транспортного средства осуществляется на основе соответствующей второй траектории TR2, и таким образом транспортное средство 1 замедляется и останавливается. Таким образом обеспечивают безопасность транспортного средства 1.
2-3. Технические результаты
[0078] Согласно описанному выше, когда неисправное устройство 100F существует, устройство 200 управления движением транспортного средства согласно варианту осуществления изобретения осуществляет управление движением транспортного средства на основе второй целевой траектории TR2, выведенной устройством 100-A генерирования целевой траектории до того, как произошла неисправность, или на основе второй целевой траектории TR2-B, выводимой устройством 100-B генерирования целевой траектории, отличающегося от неисправного устройства 100F. В любом случае управление движением транспортного средства осуществляется на основе соответствующей второй траектории TR2, и таким образом транспортное средство 1 замедляется и останавливается. Таким образом обеспечивают безопасность транспортного средства 1. Данная операция способствует повышению надежности системы управления 10 транспортным средством.
3. Третий вариант осуществления изобретения
[0079] Третий вариант осуществления является определенным примером первого варианта осуществления. Описание, пересекающееся с первым вариантом осуществления, соответственно опущено.
3-1. Система управления транспортным средством
[0080] ФИГ. 11 представляет собой схему, иллюстрирующую конфигурацию системы управления 10 транспортным средством в соответствии с третьим вариантом осуществления. Система управления 10 транспортным средством содержит устройство 100-D автономного вождения и устройство 200 управления движением транспортного средства.
[0081] Устройство 100-D управления автономным вождением является устройством 100 генерирования целевой траектории, сконфигурированным для генерирования целевой траектории TR, необходимой для автономного вождения транспортного средства 1. Автономное вождение здесь рассматривается как автономное вождение, при котором водитель не должен концентрироваться на вождении на 100 % (например, так называемое автономное вождение уровня 3 или выше).
[0082] Конфигурация устройства 100-D управления автономным вождением аналогична конфигурации устройства 100 генерирования целевой траектории, раскрытого в первом варианте осуществления (см. ФИГ. 5 и ФИГ. 6). Что касается устройства 100-D управления автономным вождением, информация 150 о дорожной обстановке и целевая траектория TR, раскрытые в первом варианте осуществления, обозначены как информация 150-D о дорожной обстановке и целевая траектория TR-D соответственно.
[0083] Устройство 100-D управления автономным вождением генерирует и выводит целевые траектории TR-D на основе информации 150-D о дорожной обстановке. целевые траектории TR-D содержат два типа целевой траектории, которые являются «автономной траекторией TR1-D движения» и «траекторией TR2-D аварийного режима», раскрытыми ниже.
3-1-1. Траектория TR1-D автономного вождения
[0084] Траектория TR1-D автономного вождения является первой целевой траекторией TR1 для автономного вождения транспортного средства 1. Т.е. траектория TR1-D автономного вождения предназначена для осуществления как минимум одного из следующих видов управления: рулевое управление, ускорение и замедление для автономного вождения транспортного средства 1.
[0085] Устройство 100-D управления автономным вождением создает план движения транспортного средства 1 во время автономного вождения на основе информации 150-D о дорожной обстановке. Примеры плана движения содержат план сохранения текущей полосы движения, план смены полосы и план избегания препятствий. Устройство 100-D управления автономным вождением генерирует в качестве траектории TR1-D автономного вождения первую целевую траекторию TR1, необходимую для транспортного средства 1 для движения в соответствии с планом движения.
[0086] Например, устройство 100-D управления автономным вождением генерирует траекторию TR1-D автономного вождения для сохранения текущей полосы движения. В частности, устройство 100-D управления автономным вождением распознает полосу движения, по которой движется транспортное средство 1, на основе картографической информации 151 и информации 152 о местоположении и получает расположение и форму полосы движения перед транспортным средством 1. В качестве альтернативы устройство 100-D управления автономным вождением может распознавать расположение и форму полосы движения перед транспортным средством 1, распознавая линию маркировки (линию полосы движения) полосы движения на основе информации 154 об окружающих условиях. Устройство 100-D управления автономным вождением генерирует траекторию TR1-D автономного вождения для сохранения полосы движения на основе расположения и формы полосы движения перед транспортным средством 1.
[0087] В качестве другого примера устройство 100-D управления автономным вождением может генерировать траекторию TR1-D автономного вождения для изменения полосы движения. В частности, устройство 100-D управления автономным вождением планирует изменение полосы движения, чтобы прибыть в место назначения, на основе картографической информации 151, информации 152 о местоположении и места назначения. Устройство 100-D управления автономным вождением генерирует траекторию TR1-D автономного вождения для изменения полосы на основе, например, картографической информации 151, информации 152 о местоположении, информации 153 о состоянии транспортного средства и информации 154 об окружающих условиях (состоянии других транспортных средств). Траектория TR1-D автономного вождения для изменения полосы требует как минимум рулевого управления.
[0088] В качестве другого примера устройство 100-D управления автономным вождением может генерировать траекторию TR1-D автономного вождения, предотвращая столкновение транспортного средства 1 и окружающих его объектов. В частности, устройство 100-D управления автономным вождением распознает цель предотвращения перед транспортным средством 1 (например, окружающие транспортные средства или пешеходы) на основе информации 154 об окружающих условиях. Устройство 100-D управления автономным вождением оценивает будущие местоположения транспортного средства 1 и цели предотвращения на основе информации 153 о состоянии транспортного средства и информации 154 об окружающих условиях и рассчитывает вероятность столкновения транспортного средства 1 и цели предотвращения. Когда вероятность столкновения транспортного средства 1 и цели предотвращения равна пороговому значению или превышает его, устройство 100-D управления автономным вождением генерирует траекторию TR1-D автономного вождения для предотвращения столкновения на основе информации 153 о состоянии транспортного средства и информации 154 об окружающих условиях. Траектория TR1-D автономного вождения для предотвращения столкновения требует как минимум рулевого управления и замедления.
[0089] Устройство 100-D управления автономным вождением повторно генерирует траекторию TR1-D автономного вождения в каждом заранее определенном цикле, т.е. обновляет траекторию TR1-D автономного вождения. Целесообразно, что устройство 100-D управления автономным вождением «непрерывно» обновляет и выводит траекторию TR1-D автономного вождения. Термин «непрерывно» здесь одновременно означает «постоянно» и «периодически». Например, вывод траектории TR1-D автономного вождения может быть приостановлен на короткое время. Также в этом случае можно сказать, что вывод траектории TR1-D автономного вождения является постоянным в долгосрочной перспективе.
3-1-2. Траектория TR2-D аварийного режима
[0090] ФИГ. 12 представляет собой концептуальную схему для описания траектории TR2-D аварийного режима. Траектория TR2-D аварийного режима представляет собой вторую целевую траекторию TR2 для замедления и остановки транспортного средства 1. В частности, траектория TR2-D аварийного режима — это вторая целевая траектория TR2 для движения транспортного средства 1 в безопасную зону остановки в аварийном режиме.
[0091] В примере, показанном на ФИГ. 12, транспортное средство 1 движется в аварийном режиме согласно траектории TR2-D аварийного режима и останавливается на обочине дороги. Например, местоположение обочины дороги в зоне остановки регистрируется заранее в картографической информации 151. В качестве альтернативы обочина дороги для остановки может быть обнаружена на основе информации 154 об окружающих условиях. Т.е. устройство 100-D управления автономным вождением распознает обочину дороги для остановки на основе как минимум одного из следующих видов информации: картографическая информация 151 и информация 154 об окружающих условиях. Устройство 100-D управления автономным вождением генерирует траекторию TR2-D аварийного режима, чтобы инициировать движение и остановку транспортного средства 1 на обочине дороги в аварийном режиме. Траектория TR2-D аварийного режима требует рулевого управления и замедления.
[0092] Устройство 100-D управления автономным вождением повторно генерирует траекторию TR2-D аварийного режима в каждом заранее определенном цикле, т.е. обновляет траекторию TR2-D аварийного режима. Целесообразно, что устройство 100-D управления автономным вождением «непрерывно» обновляет и выводит траекторию TR2-D аварийного режима. Термин «непрерывно» здесь одновременно означает «постоянно» и «периодически». Например, вывод траектории TR2-D аварийного режима может быть приостановлен на короткое время. Также в этом случае можно сказать, что вывод траектории TR2-D аварийного режима является постоянным в долгосрочной перспективе.
3-2. Управление движением транспортного средства
[0093] Устройство 200 управления движением транспортного средства получает траектории TR1-D автономного вождения и траектории TR2-D аварийного режима, выводимые устройством 100-D управления автономным вождением. Устройство 200 управления движением транспортного средства хранит полученную траекторию TR1-D автономного вождения и траекторию TR2-D аварийного режима в запоминающем устройстве 222. Устройство 200 управления движением транспортного средства осуществляет управление движением транспортного средства на основе траектории TR1-D автономного вождения или траектории TR2-D аварийного режима.
[0094] Во-первых, предполагается, что устройство 100-D управления автономным вождением находится в нормальном состоянии, т.е. неисправное устройство 100F не существует. В этом случае устройство 200 управления движением транспортного средства осуществляет управление движением транспортного средства на основе траектории TR1-D автономного вождения. Т.е. устройство 200 управления движением транспортного средства осуществляет управление движением транспортного средства так, что транспортное средство 1 следует по траектории TR1-D автономного вождения. Таким образом, достигается требуемое автономное вождение.
[0095] Затем предполагается, что возникает неисправность устройства 100-D управления автономным вождением, т.е. неисправное устройство 100F существует (см. ФИГ. 4). Автономное вождение невозможно после возникновения неисправности. Таким образом, устройство 200 управления движением транспортного средства осуществляет управление движением транспортного средства на основе траектории TR2-D аварийного режима, выведенной устройством 100-D управления автономным вождением перед тем, как произошла неисправность. Например, устройство 200 управления движением транспортного средства осуществляет управление движением транспортного средства на основе траектории TR2-D аварийного режима, выведенной устройством 100-D управления автономным вождением в последний раз перед тем, как произошла неисправность. Таким образом, транспортное средство 1 останавливается в безопасном местоположении. Т.е. обеспечена безопасность транспортного средства 1.
3-3. Технические результаты
[0096] Согласно описанному выше, когда происходит неисправность устройства 100-D управления автономным вождением, устройство 200 управления движением транспортного средства согласно этому варианту осуществления изобретения осуществляет управление движением транспортного средства на основе траектории TR2-D аварийного режима, выведенной перед тем, как произошла неисправность. Таким образом, транспортное средство 1 может быть быстро остановлено в ситуации, когда автономное вождение невозможно. В результате обеспечивается безопасность транспортного средства 1. Данная операция способствует повышению надежности системы управления 10 транспортным средством.
4. Четвертый вариант осуществления изобретения
[0097] Четвертый вариант осуществления является специфическим примером второго варианта осуществления, описанного выше. Описание, пересекающееся с раскрытыми выше вариантами осуществления, соответственно опущено.
4-1. Система управления транспортным средством
[0098] ФИГ. 13 представляет собой схему, иллюстрирующую конфигурацию системы управления 10 транспортным средством в соответствии с четвертым вариантом осуществления изобретения. Система управления 10 транспортным средством содержит устройство 100-D автономного вождения, устройство 100-G управления помощью при движении и устройство 200 управления движением транспортного средства.
[0099] Устройство 100-D управления автономным вождением является тем же, что и описанное в третьем варианте осуществления.
[0100] Устройство 100-G управления помощью при движении является устройством 100 генерирования целевой траектории, сконфигурированным для генерирования целевой траектории TR для «управления помощью при движении». Движению транспортного средства 1 помогает управление помощью при движении. В частности, в управлении помощью при движении осуществляется управление как минимум одним из следующих видов управления: рулевое управление, ускорение и замедление транспортного средства 1, для повышения безопасности движения транспортного средства 1 или стабилизации работы транспортного средства 1. Примеры управления помощью при движении содержат управление предотвращением столкновений, управление сохранением полосы и управление курсовой устойчивостью транспортного средства. Управление предотвращением столкновений способствует предотвращению столкновений транспортного средства 1 с окружающими объектами (целью предотвращения). Управление сохранением полосы уменьшает отклонение транспортного средства 1 от полосы движения. Управление курсовой устойчивостью транспортного средства уменьшает нестабильную работу транспортного средства, такую как разворот. Управление помощью при движении может быть рассмотрено как управление для снижения рисков.
[0101] Конфигурация устройства 100-G управления помощью при движении аналогична конфигурации устройства 100 генерирования целевой траектории, раскрытого в первом варианте осуществления (см. ФИГ. 5 и ФИГ. 6). Что касается устройства 100-G управления помощью при движении, информация 150 о дорожной обстановке и целевая траектория TR, раскрытые в первом варианте осуществления, обозначены как информация 150-G о дорожной обстановке и целевая траектория TR-G соответственно. Устройство 110 получения информации устройства 100-D управления автономным вождением может частично быть общим для устройства 110 получения информации устройства 100-G управления помощью при движении.
[0102] Устройство 100-G управления помощью при движении генерирует и выводит целевые траектории TR-G на основе информации 150-G о дорожной обстановке. Целевые траектории TR-G включают два типа целевых траекторий, которые представляют собой «траекторию TR1-G помощи при движении» и «траекторию TR2-G аварийного останова», описанные ниже ниже.
4-1-1. Траектория TR1-G помощи при движении
[0103] Траектория TR1-G помощи при движении является первой целевой траекторией TR1 для управления помощью при движении. Т.е. траектория TR1-G помощи при движении является первой целевой траекторией TR1 для повышения безопасности движения транспортного средства 1 или стабилизации работы транспортного средства 1.
[0104] Управление помощью при движении осуществляется непостоянно, но осуществляется в соответствии с необходимостью. Т.е. управление помощью при движении осуществляется, только когда удовлетворено заранее определенное условие осуществления. Устройство 100-G управления помощью при движении определяет, удовлетворено ли условие осуществления, на основе информации 150-G о дорожной обстановке. Когда условие осуществления удовлетворено, устройство 100-G управления помощью при движении генерирует и выводит траекторию TR1-G помощи при движении.
[0105] На ФИГ. 14 показан пример траектории TR1-G помощи при движении. Управление предотвращением столкновений рассматривается как пример управления помощью при движении. Устройство 100-G управления помощью при движении распознает цель предотвращения перед транспортным средством 1 (например, окружающие транспортные средства или пешеходы) на основе информации 154 об окружающих условиях. Устройство 100-G управления помощью при движении оценивает будущие местоположения транспортного средства 1 и цели предотвращения на основе информации 153 о состоянии транспортного средства и информации 154 об окружающих условиях и рассчитывает вероятность столкновения транспортного средства 1 и цели предотвращения. Условием осуществления для управления предотвращением столкновения является то, что вероятность столкновения транспортного средства 1 с целью предотвращения равна пороговому значению или выше его.
[0106] Когда условие осуществления для управления предотвращением столкновения удовлетворено, устройство 100-G управления помощью при движении генерирует траекторию TR1-G помощи при движении для управления предотвращением столкновения. Как показано на ФИГ. 14, траектория TR1-G помощи при движении для управления предотвращением столкновения требует как минимум одного из следующих видов управления: рулевое управление и замедление транспортного средства 1, для предотвращения столкновения с объектом, который является целью предотвращения.
[0107] Управление сохранением полосы рассматривается как другой пример управления помощью при движении. Например, когда транспортное средство 1 виляет по полосе движения, чтобы приблизиться к линии маркировки полосы (линии полосы движения), в рамках управлении сохранением полосы осуществляется рулевое управление транспортным средством 1, чтобы вернуться в центр полосы движения. Таким образом, устройство 100-G управления помощью при движении распознает линию маркировки полосы движения, по которой движется транспортное средство 1, на основе информации 154 об окружающих условиях и осуществляет мониторинг расстояния между транспортным средством 1 и линией маркировки полосы. Первое условие осуществления для управления сохранением полосы является то, что расстояние между транспортным средством 1 и линией маркировки полосы движения меньше заранее определенного порогового значения. Когда первое условие осуществления удовлетворено, устройство 100-G управления помощью при движении генерирует траекторию TR1-G помощи при движении, которая требует рулевого управления для возврата транспортного средства 1 в центр полосы движения.
[0108] При управлении сохранением полосы транспортное средство 1 замедляется в ответ на прогноз, что транспортное средство 1 может не проложить кривую перед транспортным средством 1. Таким образом, устройство 100-G управления помощью при движении получает форму дороги перед транспортным средством 1 на основе картографической информации 151 и информации 152 о местоположении. Устройство 100-G управления помощью при движении определяет, может ли транспортное средство 1 проложить кривую перед транспортным средством 1 без отклонения от полосы движения на основе формы дороги и информации 153 о состоянии транспортного средства (например, скорости транспортного средства). В это время устройство 100-G управления помощью при движении может принимать решение в отношении состояния дороги (коэффициент сцепления колес с дорогой). Состояние дороги можно оценить посредством известной технологии с использованием информации 153 о состоянии транспортного средства (например, скорости транспортного средства или скорости колес) или информации 154 об окружающей обстановке (например, графической информации). Второе условие осуществления для управления сохранением полосы состоит в том, что транспортное средство 1 может не проложить кривую перед транспортным средством 1 без отклонения от полосы движения. Когда второе условие осуществления удовлетворено, устройство 100-G управления помощью при движении генерирует траекторию TR1-G помощи при движении, которая требует замедления транспортного средства 1 для уменьшения отклонения от полосы на кривой перед транспортным средством 1.
[0109] В то время как условие осуществления удовлетворено, устройство 100-G управления помощью при движении может повторно генерировать траекторию TR1-G помощи при движении в каждом заранее определенном цикле, т.е. обновлять траекторию TR1-G помощи при движении.
4-1-2. Траектория аварийного останова TR2-G
[0110] ФИГ. 15 представляет собой концептуальную схему для описания траектории TR2-G аварийного останова. Траектория TR2-G аварийного останова представляет собой вторую целевую траекторию TR2 для замедления и остановки транспортного средства 1. В частности, траектория TR2-G аварийного останова — это вторая целевая траектория TR2 для быстрой остановки транспортного средства 1 в текущей полосе движения. В примере, показанном на ФИГ. 15, транспортное средство 1 быстро останавливается согласно траектории TR2-G аварийного останова в текущей полосе движения без рулевого управления.
[0111] Устройство 100-G управления помощью при движении повторно генерирует траекторию TR2-G аварийного останова в каждом заранее определенном цикле, т.е. обновляет траекторию TR2-G аварийного останова. Целесообразно, что устройство 100-G управления помощью при движении «непрерывно» обновляет и выводит траекторию TR2-G аварийного останова. Термин «непрерывно» здесь одновременно означает «постоянно» и «периодически». Например, вывод траектории TR2-G аварийного останова может быть приостановлен на короткое время. Также в этом случае можно сказать, что вывод траектории TR2-G аварийного останова является постоянным в долгосрочной перспективе.
4-2. Управление движением транспортного средства
[0112] Устройство 200 управления движением транспортного средства получает траекторию TR1-D автономного вождения и траекторию TR2-D аварийного режима, выводимые устройством 100-D управления автономным вождением. Устройство 200 управления движением транспортного средства также получает траекторию TR2-G аварийного останова, выводимую устройством 100-G управления помощью при движении. Когда условие осуществления для управления помощью при движении удовлетворено, устройство 200 управления движением транспортного средства получает траекторию TR1-G помощи при движении, выводимую устройством 100-G управления помощью при движении. Устройство 200 управления движением транспортного средства хранит полученные целевые траектории TR (TR1-D, TR2-D, TR1-G и TR2-G) в запоминающем устройстве 222. Устройство 200 управления движением транспортного средства осуществляет управление движением транспортного средства на основе как минимум одной целевой траектории TR.
[0113] ФИГ. 16 представляет собой концептуальную схему для описания управления движением транспортного средства согласно данному варианту осуществления изобретения.
Правило блокировки
[0114] В случае неисправности устройства 100-D управления автономным вождением траектория TR1-D автономного вождения блокируется. Даже если неисправность устройства 100-D управления автономным вождением устранена, траектория TR1-D автономного вождения остается заблокированной. Когда условие осуществления для управления помощью при движении удовлетворено и выведена траектория TR1-G помощи при движении, траектория TR2-D аварийного режима блокируется. В случае неисправности устройства 100-G управления помощью при движении блокируется траектория TR1-D автономного вождения и траектория TR2-D аварийного режима.
Правило приоритета
[0115] Траектория TR1-D автономного вождения, траектория TR2-D аварийного режима и траектория TR2-G аварийного останова имеют уровни приоритета в убывающем порядке. Т.е. уровень приоритета траектории TR1-D автономного вождения является наивысшим, а уровень приоритета траектории TR2-G аварийного останова является самым низшим.
[0116] Когда траектория TR1-D автономного вождения разблокирована, управление движением транспортного средства осуществляется на основе траектории TR1-D автономного вождения. Когда траектория TR1-D автономного вождения заблокирована, управление движением транспортного средства осуществляется на основе траектории TR2-D аварийного режима, обладающей наивысшим уровнем приоритета. Когда заблокированы и траектория TR1-D автономного вождения, и траектория TR2-D аварийного вождения, управление движением транспортного средства осуществляется на основе траектории TR2-G аварийного останова.
Правило выбора
[0117] Когда условие осуществления для управления помощью при движении удовлетворено и выведена траектория TR1-G помощи при движении, осуществляется выбор между траекторией TR1-G помощи при движении и другой целевой траекторией TR (TR1-D или TR2-G).
[0118] В рулевом управлении траектория TR1-G помощи при движении имеет больший уровень приоритета. Т.е. рулевое управление осуществляется на основе траектории TR1-G помощи при движении.
[0119] В управлении замедлением целевая траектория TR, требующая наивысшего уровня замедления, имеет наивысший уровень приоритета. Например, когда траектория TR1-G помощи при движении требует относительно высокого уровня замедления (например, -1,0 g), а траектория TR1-D автономного вождения требует относительно низкого уровня замедления (например, -0,5 g), траектория TR1-G помощи при движении имеет больший уровень приоритета. Когда траектория TR1-D автономного вождения требует относительно высокого уровня замедления (например, -1,0 g), а траектория TR1-G помощи при движении требует относительно низкого уровня замедления (например, -0,5 g), траектория TR1-D автономного вождения имеет больший уровень приоритета.
[0120] Устройство 200 управления движением транспортного средства может передавать результат выбора устройству 100-D управления автономным вождением и устройству 100-G управления помощью при движении.
[0121] Различные примеры управления движением транспортного средства в соответствии с правилами, раскрытыми выше, раскрыты ниже.
4-3. Различные примеры управления движением транспортного средства
4-3-1. Первый пример
[0122] ФИГ. 17 представляет собой временную диаграмму для раскрытия первого примера управления движением транспортного средства в соответствии с вариантом осуществления.
[0123] В первом примере устройство 100-D управления автономным вождением и устройство 100-G управления помощью при движении находятся в нормальном состоянии, т.е. неисправное устройство 100F не существует. Устройство 100-D управления автономным вождением генерирует (обновляет) и выводит траекторию TR1-D автономного вождения и траекторию TR2-D аварийного режима. Устройство 100-G управления помощью при движении генерирует (обновляет) и выводит траекторию TR2-G аварийного останова. Условие осуществления для управления помощью при движении не удовлетворено, и устройство 100-G управления помощью при движении не выводит траекторию TR1-G помощи при движении. Состояние далее обозначено как «первое состояние».
[0124] В первом состоянии уровень приоритета траектории TR1-D автономного вождения является наивысшим. Таким образом, устройство 200 управления движением транспортного средства осуществляет управление движением транспортного средства на основе траектории TR1-D автономного вождения. Т.е. устройство 200 управления движением транспортного средства осуществляет управление движением транспортного средства так, что транспортное средство 1 следует траектории TR1-D автономного вождения.
4-3-2. Второй пример
[0125] ФИГ. 18 представляет собой временную диаграмму для описания второго примера управления движением транспортного средства в соответствии с вариантом осуществления изобретения. Описание, пересекающееся с первым примером, соответственно опущено.
[0126] Условие осуществления для управления помощью при движении удовлетворяется при первом состоянии. Устройство 100-G управления помощью при движении генерирует и выводит траекторию TR1-G помощи при движении. Состояние далее обозначено как «второе состояние».
[0127] В примере, показанном на ФИГ. 18, период от момента времени t1 до момента времени t2 соответствует второму состоянию. Устройство 100-G управления помощью при движении передает начало и конец управления помощью при движении на устройство 200 управления движением транспортного средства и устройство 100-D управления автономным вождением. На основе передачи устройство 200 управления движением транспортного средства распознает осуществление управления помощью при движении. Также во время осуществления управления помощью при движении устройство 100-D управления автономным вождением генерирует (обновляет) и выводит траекторию TR1-D автономного вождения и траекторию TR2-D аварийного режима.
[0128] Во втором состоянии устройство 200 управления движением транспортного средства блокирует траекторию TR2-D аварийного режима в соответствии с правилом блокировки, раскрытым ниже. Устройство 200 управления движением транспортного средства осуществляет управление движением транспортного средства на основе траектории TR1-D автономного вождения или траектории TR1-G помощи при движении. В частности, устройство 200 управления движением транспортного средства осуществляет выбор между траекторией TR1-D автономного вождения и траекторией TR1-G помощи при движении в соответствии с правилом выбора, раскрытым выше, и осуществляет управление движением транспортного средства на основе результата выбора.
4-3-3. Третий пример
[0129] ФИГ. 19 представляет собой временную диаграмму для описания третьего примера управления движением транспортного средства в соответствии с вариантом осуществления изобретения. Описание, пересекающееся с примерами выше, соответственно опущено.
[0130] В первом состоянии возникает неисправность устройства 100-D управления автономным вождением, т.е. устройство 100-D управления автономным вождением становится неисправным устройством 100F. Состояние далее обозначено как «третье состояние».
[0131] В примере, показанном на ФИГ. 19, период от момента времени t1 до момента времени t2 соответствует третьему состоянию. Устройство 100-D управления автономным вождением обнаруживает свою неисправность и выводит сигнал ошибки на устройство 200 управления движением транспортного средства и устройство 100-G управления помощью при движении. На основе сигнала ошибки устройство 200 управления движением транспортного средства распознает неисправность в устройстве 100-D управления автономным вождением.
[0132] В третьем состоянии устройство 200 управления движением транспортного средства блокирует траекторию TR1-D автономного вождения в соответствии с правилом блокировки, раскрытым выше. Устройство 200 управления движением транспортного средства осуществляет управление движением транспортного средства на основе траектории TR2-D аварийного режима в соответствии с правилом приоритета, раскрытым выше.
[0133] В то время как имеет место неисправность устройства 100-D управления автономным вождением, обновление или вывод траектории TR2-D аварийного режима не осуществляется надлежащим образом. Таким образом, устройство 200 управления движением транспортного средства осуществляет управление движением транспортного средства на основе траектории TR2-D аварийного режима, выведенной устройством 100-D управления автономным вождением до того, как произошла неисправность. Например, устройство 200 управления движением транспортного средства осуществляет управление движением транспортного средства на основе траектории TR2-D аварийного режима, выведенной устройством 100-D управления автономным вождением в последний раз перед тем, как произошла неисправность. Таким образом, транспортное средство 1 останавливается в безопасном местоположении.
[0134] Траектория TR1-D автономного вождения остается блокированной также после момента времени t2, когда устройство 100-D управления автономным вождением восстановлено после неисправности.
4-3-4. Четвертый пример
[0135] ФИГ. 20 представляет собой временную диаграмму для раскрытия четвертого примера управления движением транспортного средства в соответствии с вариантом осуществления изобретения. Описание, пересекающееся с примерами выше, соответственно опущено.
[0136] В третьем варианте осуществления, описанном выше, в третьем состоянии дополнительно происходит неисправность устройства 100-G управления помощью при движении, т.е. и устройство 100-D управления автономным вождением, и устройство 100-G управления помощью при движении являются неисправными устройствами 100F. Состояние далее обозначено как «четвертое состояние».
[0137] В примере, показанном на ФИГ. 20, период после момента времени t2 соответствует четвертому состоянию. Устройство 100-G управления помощью при движении обнаруживает свою неисправность и выводит сигнал ошибки на устройство 200 управления движением транспортного средства и устройство 100-D управления автономным вождением. На основе сигнала ошибки устройство 200 управления движением транспортного средства распознает неисправность в устройстве 100-G управления помощью при движении.
[0138] В четвертом состоянии устройство 200 управления движением транспортного средства блокирует траекторию TR1-D автономного вождения и траекторию TR2-D аварийного режима в соответствии с правилом блокировки, раскрытым выше. Устройство 200 управления движением транспортного средства осуществляет управление движением транспортного средства на основе траектории TR2-G аварийного останова в соответствии с правилом приоритета, раскрытым выше.
[0139] В то время как происходит неисправность устройства 100-G управления помощью при движении, траектория TR2-G аварийного останова не обновляется и не выводится надлежащим образом. Таким образом, устройство 200 управления движением транспортного средства осуществляет управление движением транспортного средства на основе траектории TR2-G аварийного останова, выведенной устройством 100-G управления помощью при движении до того, как произошла неисправность. Например, устройство 200 управления движением транспортного средства осуществляет управление движением транспортного средства на основе траектории TR2-G аварийного останова, выведенной устройством 100-G управления помощью при движении в последний раз перед тем, как произошла неисправность. Таким образом, транспортное средство 1 останавливается.
4-3-5. Пятый пример
[0140] ФИГ. 21 представляет собой временную диаграмму для описания пятого примера управления движением транспортного средства, которое должно осуществляться системой управления транспортным средством в соответствии с четвертым вариантом осуществления настоящего изобретения. Описание, пересекающееся с примерами выше, соответственно опущено.
[0141] Условие осуществления для управления помощью при движении удовлетворяется в третьем состоянии. Устройство 100-G управления помощью при движении генерирует и выводит траекторию TR1-G помощи при движении. Состояние далее обозначено как «пятое состояние». В примере, показанном на ФИГ. 21, период после момента времени t2 соответствует пятому состоянию.
[0142] В пятом состоянии устройство 200 управления движением транспортного средства блокирует траекторию TR2-D аварийного режима в соответствии с правилом блокировки, раскрытым ниже. Устройство 200 управления движением транспортного средства осуществляет управление движением транспортного средства на основе траектории TR2-G аварийного останова в соответствии с правилом приоритета, раскрытым выше.
[0143] В это время также выводится траектория TR1-G помощи при движении. Таким образом, устройство 200 управления движением транспортного средства осуществляет управление движением транспортного средства на основе траектории TR1-G помощи при движении и траектории TR2-G аварийного останова, выводимой устройством 100-G управления помощью при движении. В частности, устройство 200 управления движением транспортного средства осуществляет выбор между траекторией TR1-G помощи при движении и траекторией TR2-G аварийного останова в соответствии с правилом выбора, раскрытым выше, и осуществляет управление движением транспортного средства на основе результата выбора. Осуществление рулевого управления зависит от траектории TR1-G помощи при движении, но как минимум осуществляется управление замедлением. Таким образом, транспортное средство 1 останавливается.
4-3-6. Шестой пример
[0144] ФИГ. 22 представляет собой временную диаграмму для описания шестого примера управления движением транспортного средства, которое должно осуществляться системой управления транспортным средством в соответствии с данным вариантом осуществления. Описание, пересекающееся с примерами выше, соответственно опущено.
[0145] В первом состоянии происходит неисправность устройства 100-G управления помощью при движении, т.е. устройство 100-G управления помощью при движении становится неисправным устройством 100F. Состояние далее обозначено как «шестое состояние». В примере, показанном на ФИГ. 22, период после момента времени t1 соответствует шестому состоянию.
[0146] В шестом состоянии устройство 200 управления движением транспортного средства блокирует траекторию TR1-D автономного вождения и траекторию TR2-D аварийного режима в соответствии с правилом блокировки, раскрытым выше. Устройство 200 управления движением транспортного средства осуществляет управление движением транспортного средства на основе траектории TR2-G аварийного останова в соответствии с правилом приоритета, раскрытым выше.
[0147] В то время как происходит неисправность устройства 100-G управления помощью при движении, траектория TR2-G аварийного останова не обновляется и не выводится надлежащим образом. Таким образом, устройство 200 управления движением транспортного средства осуществляет управление движением транспортного средства на основе траектории TR2-G аварийного останова, выведенной устройством 100-G управления помощью при движении до того, как произошла неисправность. Например, устройство 200 управления движением транспортного средства осуществляет управление движением транспортного средства на основе траектории TR2-G аварийного останова, выведенной устройством 100-G управления помощью при движении в последний раз перед тем, как произошла неисправность. Таким образом, транспортное средство 1 останавливается.
4-3-7. Седьмой пример
[0148] ФИГ. 23 представляет собой временную диаграмму для описания седьмого примера управления движением транспортного средства, которое должно осуществляться системой управления транспортным средством в соответствии с четвертым вариантом осуществления настоящего изобретения. Описание, пересекающееся с примерами выше, соответственно опущено.
[0149] Во втором состоянии возникает неисправность устройства 100-D управления автономным вождением, т.е. устройство 100-D управления автономным вождением становится неисправным устройством 100F. Состояние далее обозначено как «седьмое состояние». В примере, показанном на ФИГ. 23, период после момента времени t2 соответствует седьмому состоянию.
[0150] В седьмом состоянии устройство 200 управления движением транспортного средства блокирует траекторию TR1-D автономного вождения в соответствии с правилом блокировки, раскрытым выше. Так как осуществление управления помощью при движении продолжается, траектория TR2-D остается блокированной. Таким образом, устройство 200 управления движением транспортного средства осуществляет управление движением транспортного средства на основе траектории TR2-G аварийного останова в соответствии с правилом приоритета, раскрытым выше.
[0151] В это время также выводится траектория TR1-G помощи при движении. Таким образом, устройство 200 управления движением транспортного средства осуществляет управление движением транспортного средства на основе траектории TR1-G помощи при движении и траектории TR2-G аварийного останова, выводимой устройством 100-G управления помощью при движении. В частности, устройство 200 управления движением транспортного средства осуществляет выбор между траекторией TR1-G помощи при движении и траекторией TR2-G аварийного останова в соответствии с правилом выбора, раскрытым выше, и осуществляет управление движением транспортного средства на основе результата выбора. Осуществление рулевого управления зависит от траектории TR1-G помощи при движении, но как минимум осуществляется управление замедлением. Таким образом, транспортное средство 1 останавливается.
4-3-8. Восьмой пример
[0152] ФИГ. 24 представляет собой временную диаграмму для описания восьмого примера управления движением транспортного средства, которое должно осуществляться системой управления транспортным средством в соответствии с четвертым вариантом осуществления настоящего изобретения. Описание, пересекающееся с примерами выше, соответственно опущено.
[0153] Во втором состоянии происходит неисправность устройства 100-G управления помощью при движении, т.е. устройство 100-G управления помощью при движении становится неисправным устройством 100F. Состояние далее обозначено как «восьмое состояние». В примере, показанном на ФИГ. 24, период после момента времени t2 соответствует восьмому состоянию.
[0154] В восьмом состоянии устройство 200 управления движением транспортного средства блокирует траекторию TR1-D автономного вождения и траекторию TR2-D аварийного режима в соответствии с правилом блокировки, раскрытым выше. Устройство 200 управления движением транспортного средства осуществляет управление движением транспортного средства на основе траектории TR2-G аварийного останова в соответствии с правилом приоритета, раскрытым выше.
[0155] С того времени, как происходит неисправность устройства 100-G управления помощью при движении, траектория TR2-G аварийного останова не обновляется и не выводится надлежащим образом. Таким образом, устройство 200 управления движением транспортного средства осуществляет управление движением транспортного средства на основе траектории TR2-G аварийного останова, выведенной устройством 100-G управления помощью при движении до того, как произошла неисправность. Например, устройство 200 управления движением транспортного средства осуществляет управление движением транспортного средства на основе траектории TR2-G аварийного останова, выведенной устройством 100-G управления помощью при движении в последний раз перед тем, как произошла неисправность. Таким образом, транспортное средство 1 останавливается.
[0156] Устройство 200 управления движением транспортного средства хранит траектории TR1-G помощи при движении, выведенную устройством 100-G управления помощью при движении до того, как произошла неисправность. После того, как произошла неисправность, устройство 200 управления движением транспортного средства может осуществлять управление помощью при движении упреждающим способом с учетом траектории TR1-G помощи при движении. Т.е. в восьмом состоянии устройство 200 управления движением транспортного средства может осуществлять управление движением транспортного средства на основе траектории TR1-G помощи при движении и траектории TR2-G аварийного останова устройством 100-G управления помощью при движении, выведенных перед тем, как произошла неисправность. В частности, устройство 200 управления движением транспортного средства осуществляет выбор между траекторией TR1-G помощи при движении и траекторией TR2-G аварийного останова в соответствии с правилом выбора, раскрытым выше, и осуществляет управление движением транспортного средства на основе результата выбора. Таким образом, осуществляется как минимум управление замедлением, и транспортное средство 1 останавливается.
4-4. Технические результаты
[0157] Согласно раскрытому выше, когда существует неисправное устройство 100F, устройство 200 управления движением транспортного средства согласно варианту осуществления изобретения осуществляет управление движением транспортного средства на основе траектории TR2-D аварийного режима или траектории TR2-G аварийного останова. В частности, когда происходит неисправность устройства 100-D управления автономным вождением, устройство 200 управления движением транспортного средства осуществляет управление движением транспортного средства на основе траектории TR2-D аварийного режима, выведенной перед тем, как произошла неисправность, или на основе траектории TR2-G аварийного останова, выводимой устройством 100-G управления помощью при движении, находящемся в нормальном состоянии. При неисправности устройства 100-G управления помощью при движении устройство 200 управления движением транспортного средства осуществляет управление движением транспортного средства на основе траектории TR2-G аварийного останова, выведенной до того, как произошла неисправность. Таким образом, транспортное средство 1 быстро останавливается, и обеспечивается безопасность транспортного средства 1. Данная операция способствует повышению надежности системы управления 10 транспортным средством.
5. Пятый вариант осуществления изобретения
[0158] Пятый вариант осуществления является измененным примером четвертого варианта осуществления. Описание, пересекающееся с четвертым вариантом осуществления, соответственно опущено.
[0159] ФИГ. 25 представляет собой схему, иллюстрирующую конфигурацию системы управления 10 транспортным средством в соответствии с пятым вариантом осуществления. В пятом варианте осуществления траектория TR2-D аварийного режима опущена. Т.е. устройство 100-D управления автономным вождением генерирует и выводит только траекторию TR1-D автономного вождения.
[0160] ФИГ. 26 представляет собой временную диаграмму для раскрытия примера управления движением транспортного средства, которое должно осуществляться системой управления транспортным средством в соответствии с четвертым вариантом осуществления настоящего изобретения. В первом состоянии возникает неисправность устройства 100-D управления автономным вождением, т.е. устройство 100-D управления автономным вождением становится неисправным устройством 100F. Состояние далее обозначено как «девятое состояние». В примере, показанном на ФИГ. 26, период от момента времени t1 до момента времени t2 соответствует девятому состоянию.
[0161] В девятом состоянии устройство 200 управления движением транспортного средства блокирует траекторию TR1-D автономного вождения в соответствии с правилом блокировки, раскрытым выше. Устройство 200 управления движением транспортного средства осуществляет управление движением транспортного средства на основе траектории TR2-G аварийного останова, выводимой устройством 100-G управления помощью при движении. Таким образом, транспортное средство 1 останавливается. В сравнении с третьим состоянием, показанным на ФИГ. 19, траектория TR2-D аварийного режима не существует, и таким образом траектория TR2-G аварийного останова используется в качестве замены траектории TR2-D аварийного режима.
[0162] Управление движением транспортного средства в других состояниях аналогично четвертому варианту осуществления (см. ФИГ. 17–18 и ФИГ. 20–24).
[0163] Пятый вариант осуществления позволяет достичь технического результата, аналогичного результату четвертого варианта осуществления изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОМОЩИ ПРИ ВОЖДЕНИИ И УСТРОЙСТВО ПОМОЩИ ПРИ ВОЖДЕНИИ | 2018 |
|
RU2768091C1 |
| СПОСОБ ПОМОЩИ ПРИ ВОЖДЕНИИ И УСТРОЙСТВО ПОМОЩИ ПРИ ВОЖДЕНИИ | 2018 |
|
RU2767846C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2021 |
|
RU2755428C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2021 |
|
RU2753086C1 |
| СПОСОБ И УСТРОЙСТВО СОДЕЙСТВИЯ ДВИЖЕНИЮ ТРАНСПОРТНОГО СРЕДСТВА | 2020 |
|
RU2796464C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2021 |
|
RU2753082C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2021 |
|
RU2754021C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ И УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2019 |
|
RU2783328C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2021 |
|
RU2754470C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2021 |
|
RU2753501C1 |
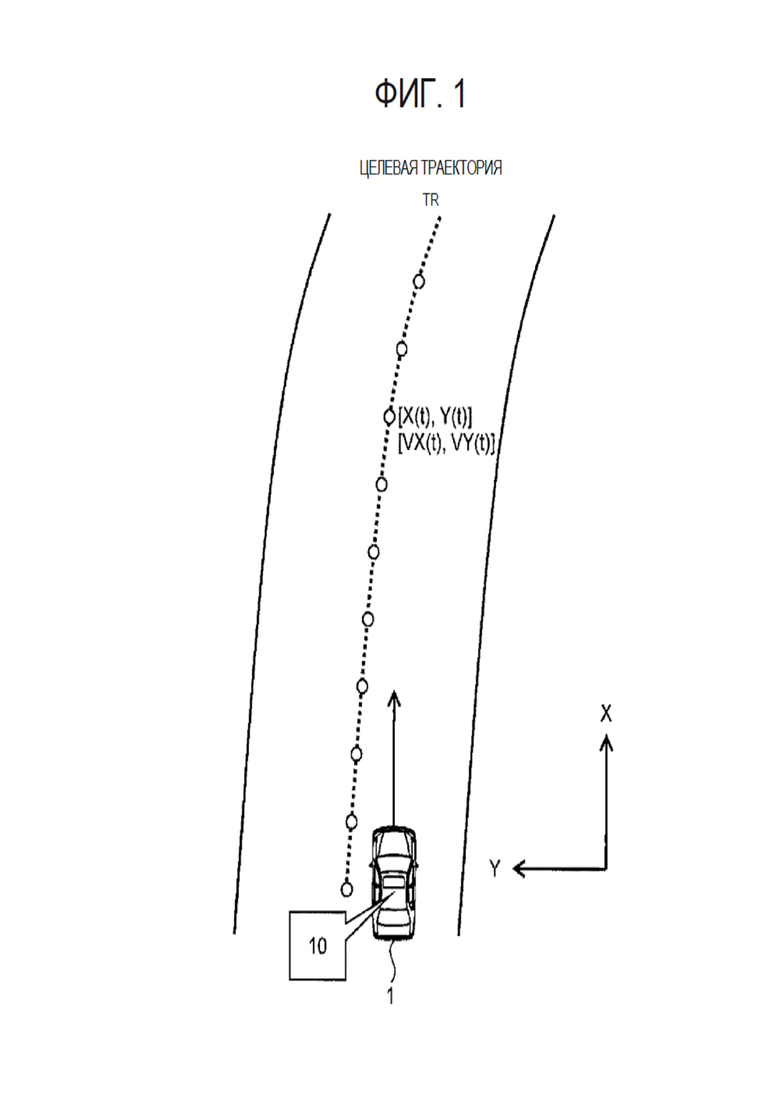

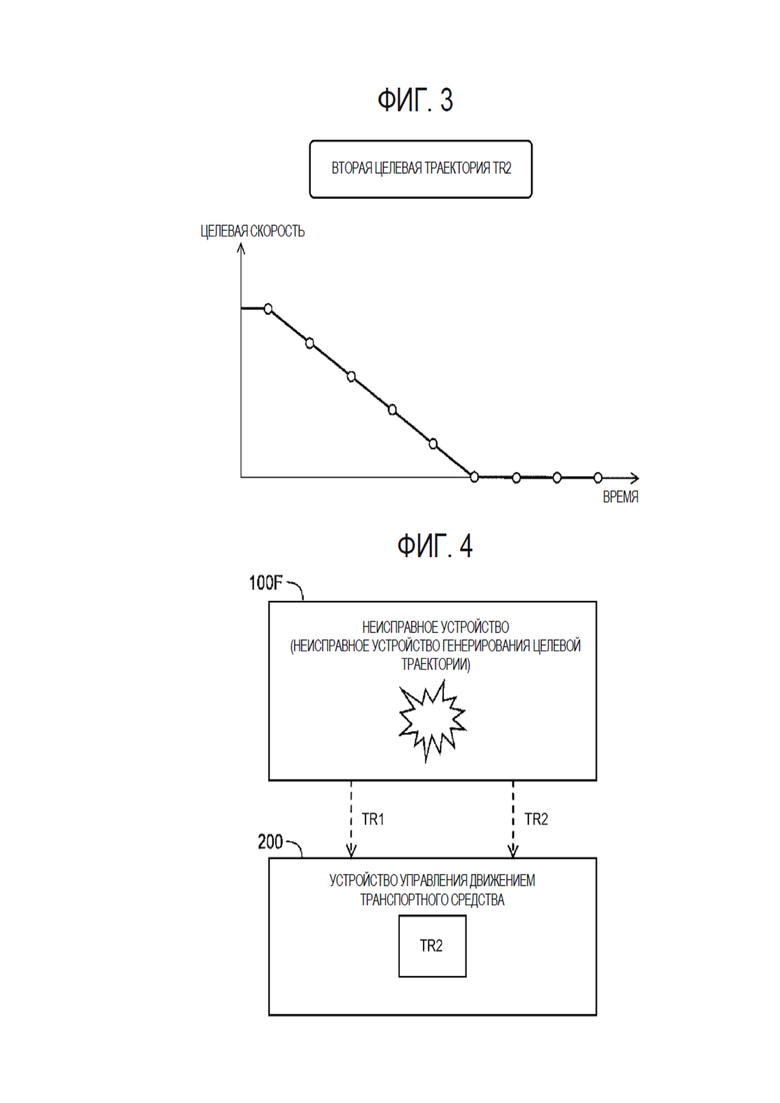
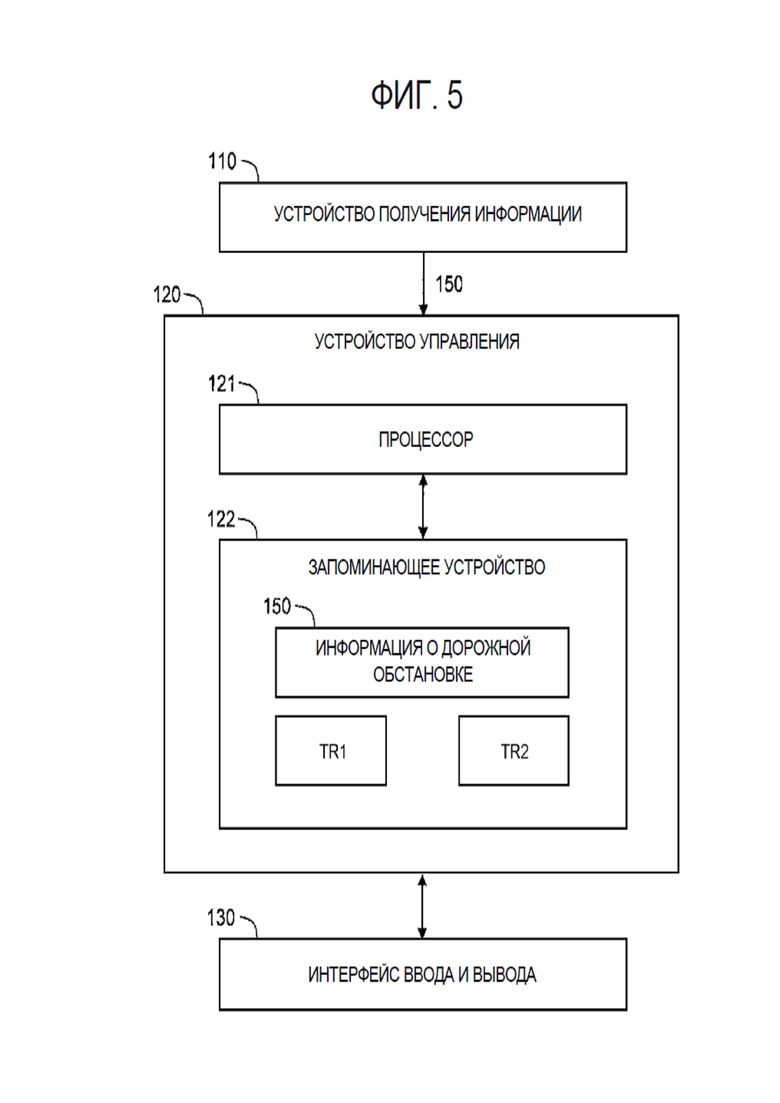
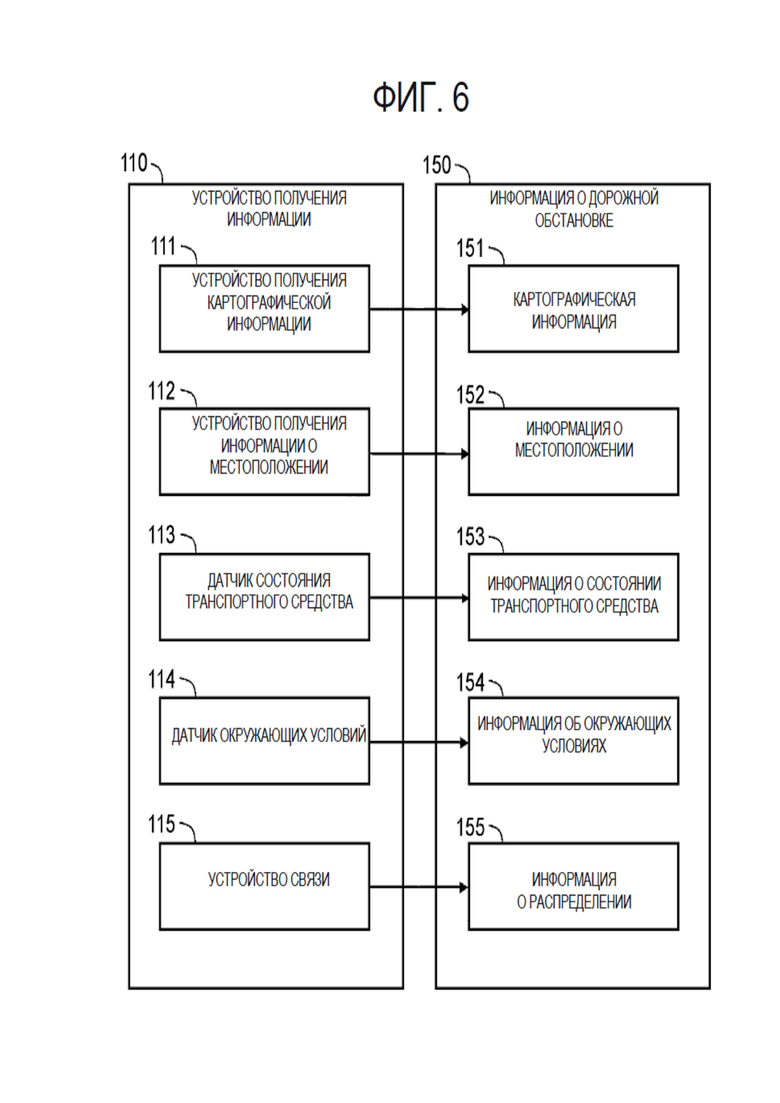



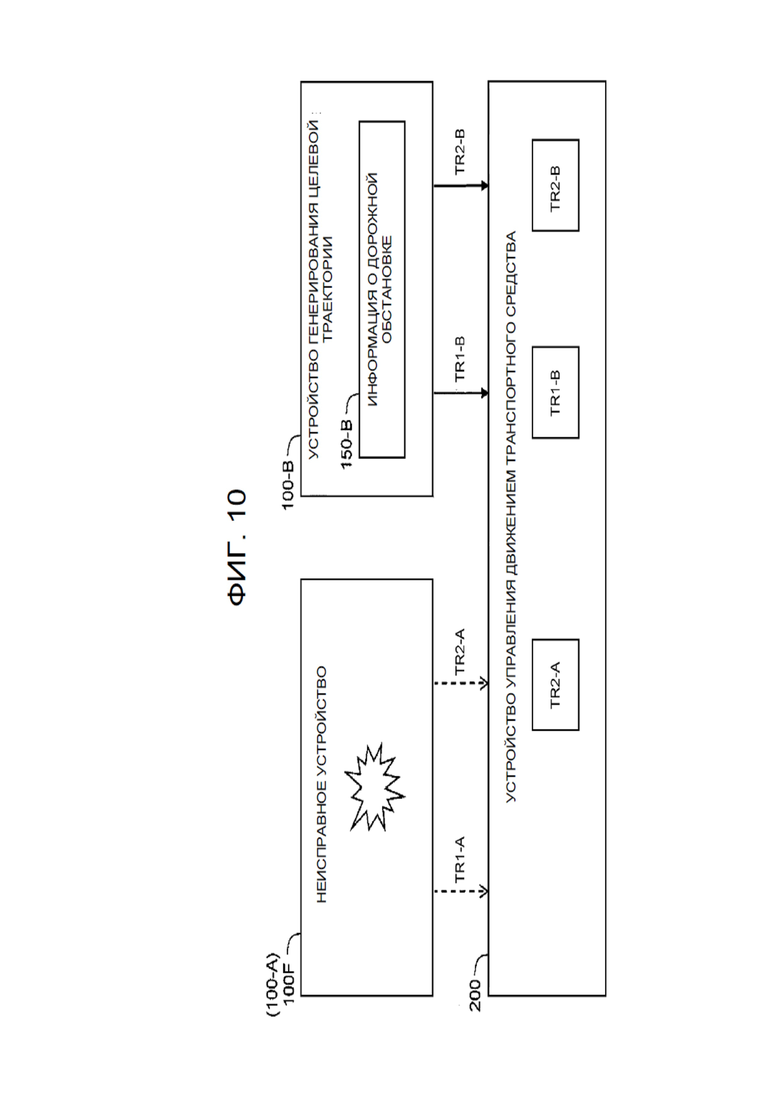


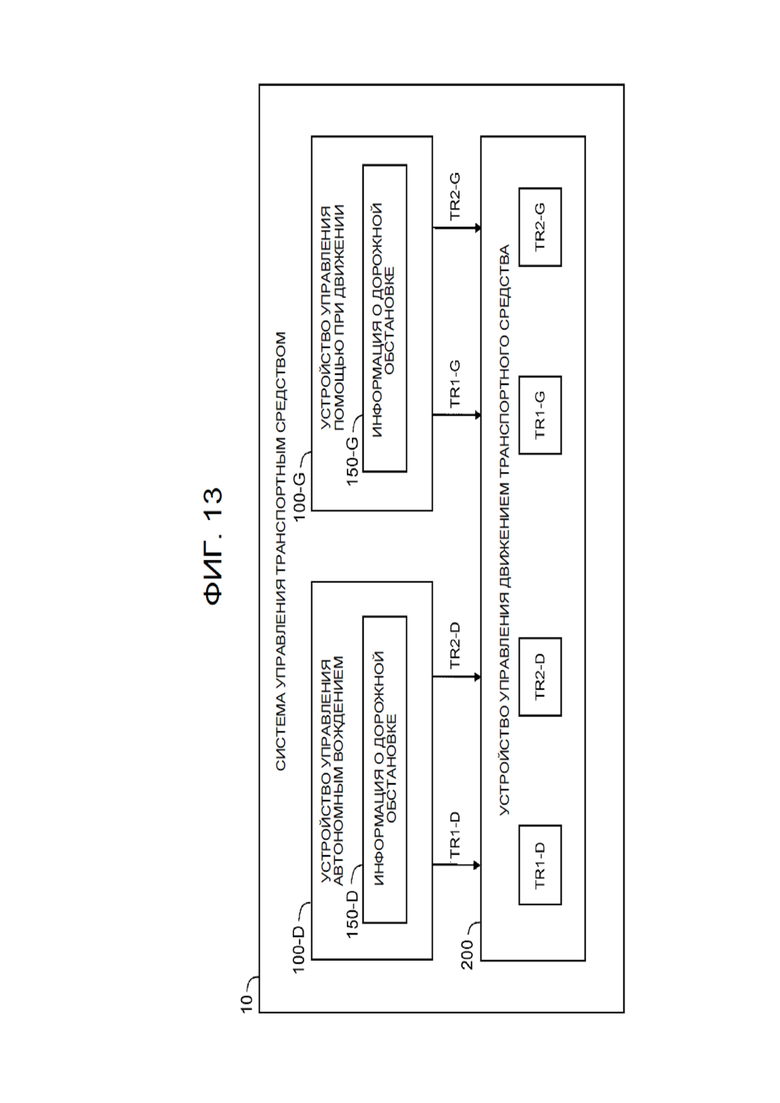




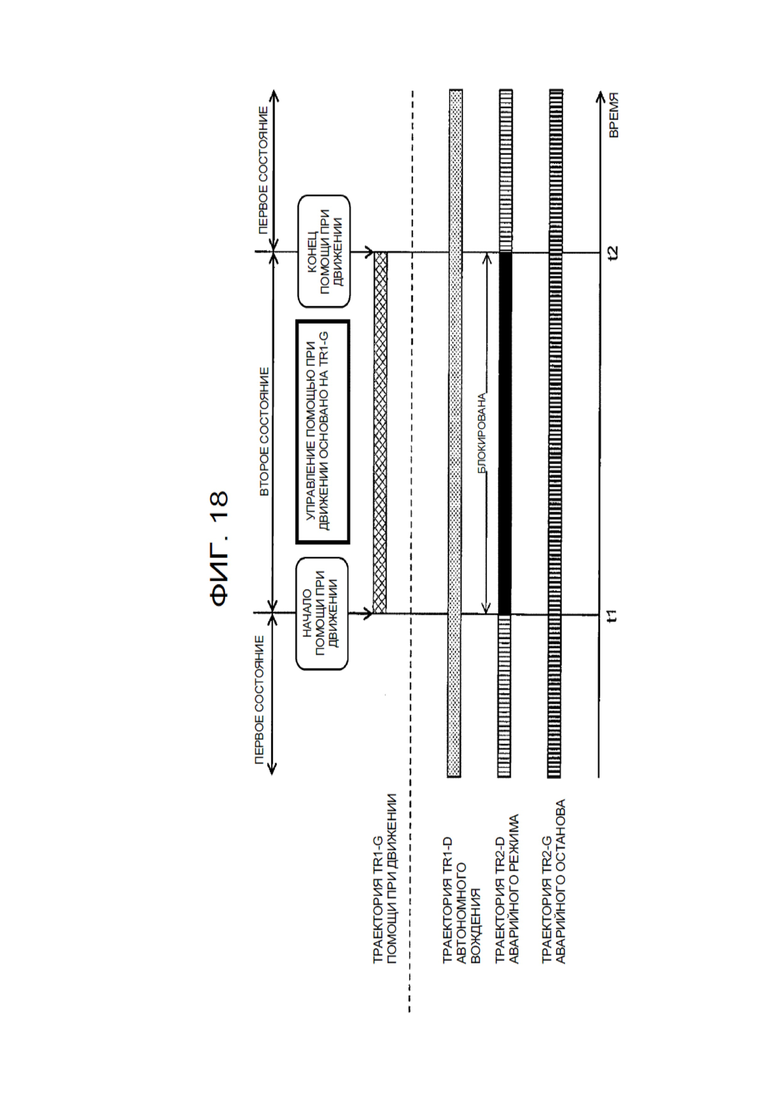
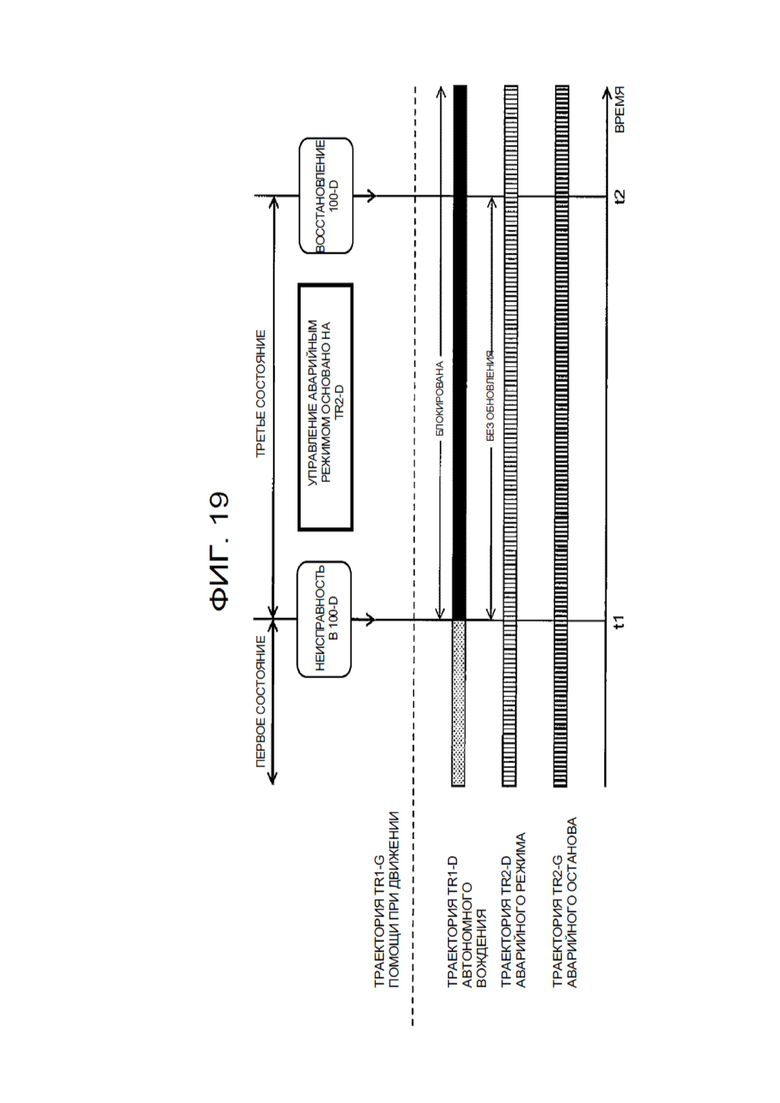

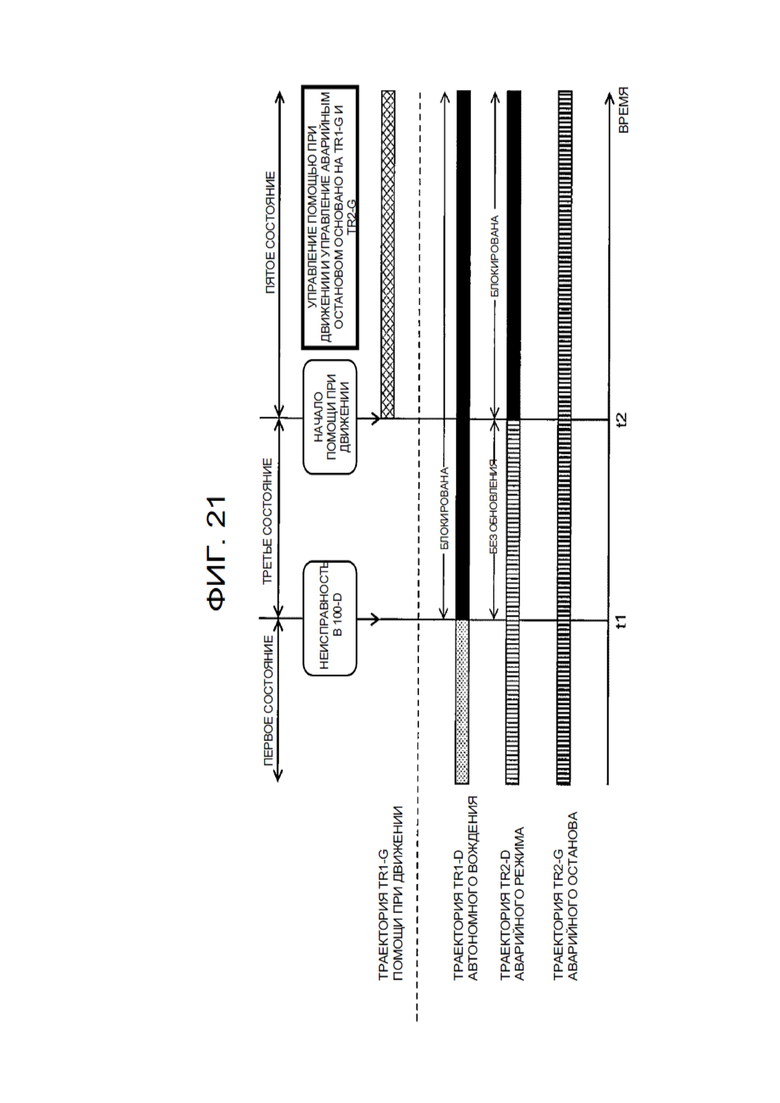





Изобретение относится к системе управления транспортным средством. Система управления транспортным средством содержит одно или несколько устройств генерирования целевой траектории и устройство управления движением транспортного средства. Устройство управления движением транспортного средства сконфигурировано для получения целевых траекторий, выводимых с одного или нескольких устройств генерирования целевой траектории, и осуществления управления движением транспортного средства для управления движением транспортного средства на основе полученных целевых траекторий. Первая целевая траектория представляет собой целевую траекторию как минимум для одного из следующих видов управления: рулевое управление, ускорение и замедление транспортного средства. Вторая целевая траектория представляет собой целевую траекторию для замедления и остановки транспортного средства. Среди одного или нескольких устройств генерирования целевой траектории может быть неисправное устройство. Устройство управления движением транспортного средства сконфигурировано для управления движением транспортного средства на основе первой целевой траектории, выводимой с одного или нескольких устройств генерирования целевой траектории, когда неисправное устройство отсутствует, и остановки транспортного средства посредством осуществления управления движением транспортного средства на основе второй целевой траектории, выведенной одним или несколькими устройствами генерирования целевой траектории до того, как произошла неисправность, или на основе второй целевой траектории, выводимой устройством генерирования целевой траектории, отличающимся от неисправного устройства, среди устройств генерирования целевой траектории, когда неисправное устройство существует. Достигается повышение безопасности управления транспортным средством. 16 з.п. ф-лы, 26 ил.
1. Система управления транспортным средством, сконфигурированная для управления транспортным средством и содержащая:
одно или несколько устройств генерирования целевой траектории, сконфигурированных для генерирования и вывода целевых траекторий, каждая из которых включает целевое местоположение и целевую скорость транспортного средства; и
устройство управления движением транспортного средства, сконфигурированное для получения целевых траекторий, выводимых с одного или нескольких устройств генерирования целевой траектории, и осуществления управления движением транспортного средства для управления движением транспортного средства на основе полученных целевых траекторий, при этом
первая целевая траектория представляет собой целевую траекторию как минимум для одного из следующих видов управления: рулевое управление, ускорение и замедление транспортного средства,
вторая целевая траектория представляет собой целевую траекторию для замедления и остановки транспортного средства,
среди одного или нескольких устройств генерирования целевой траектории может быть неисправное устройство, которое представляет собой устройство генерирования целевой траектории, имеющее неисправность,
устройство управления движением транспортного средства сконфигурировано для управления движением транспортного средства на основе первой целевой траектории, выводимой с одного или нескольких устройств генерирования целевой траектории, когда неисправное устройство отсутствует, и
устройство управления движением транспортного средства сконфигурировано для остановки транспортного средства посредством осуществления управления движением транспортного средства на основе второй целевой траектории, выведенной одним или несколькими устройствами генерирования целевой траектории до того, как произошла неисправность, или на основе второй целевой траектории, выводимой устройством генерирования целевой траектории, отличающимся от неисправного устройства, среди устройств генерирования целевой траектории, когда неисправное устройство существует.
2. Система управления транспортным средством по п. 1, в которой одно или несколько устройств генерирования целевой траектории сконфигурировано для непрерывного обновления и вывода второй целевой траектории.
3. Система управления транспортным средством по п. 2, в которой устройство управления движением транспортного средства сконфигурировано для того, чтобы, когда неисправное устройство существует, остановить транспортное средство посредством осуществления управления движением транспортного средства на основе второй целевой траектории, выведенной одним или несколькими устройствами генерирования целевой траектории в последний раз перед тем, как произошла неисправность.
4. Система управления транспортным средством по п. 1, в которой
одно или несколько устройств генерирования целевой траектории включают устройство управления автономным вождением, сконфигурированное для генерирования и вывода траектории автономного вождения и траектории аварийного режима,
траектория автономного вождения является первой целевой траекторией для автономного вождения транспортного средства,
траектория аварийного режима является второй целевой траекторией для замедления и остановки транспортного средства,
устройство управления движением транспортного средства сконфигурировано для того, чтобы, когда неисправное устройство не существует, осуществлять управление движением транспортного средства на основе траектории автономного вождения, выводимой устройством управления автономным вождением, и
устройство управления движением транспортного средства сконфигурировано для того, чтобы, когда устройство управления автономным вождением является неисправным устройством, остановить транспортное средство посредством осуществления управления движением транспортного средства на основе траектории аварийного режима, выведенной устройством управления автономным вождением перед тем, как произошла неисправность.
5. Система управления транспортным средством по п. 4, в которой устройство управления автономным вождением сконфигурировано для непрерывного обновления и вывода траектории аварийного режима.
6. Система управления транспортным средством по п. 1, в которой
устройство генерирования целевой траектории содержит:
устройство управления автономным вождением, сконфигурированное для генерирования и вывода как минимум траектории автономного вождения; и
устройство управления помощью при движении, сконфигурированное для генерирования и вывода траектории помощи при движении и траектории аварийного останова,
траектория автономного вождения является первой целевой траекторией для автономного вождения транспортного средства,
траектория помощи при движении является первой целевой траекторией для повышения безопасности движения транспортного средства или стабилизации работы транспортного средства,
траектория аварийного останова является второй целевой траекторией для замедления и остановки транспортного средства,
устройство управления помощью при движении сконфигурировано для определения того, удовлетворено ли заранее заданное целевое условие осуществления, и для генерирования и вывода траектории помощи при движении, когда удовлетворено заранее заданное целевое условие осуществления,
устройство управления движением транспортного средства сконфигурировано для осуществления управления движением транспортного средства на основе траектории автономного вождения в первом состоянии, при котором неисправное устройство не существует, траектория автономного вождения выводится устройством управления автономным вождением, и траектория помощи при движении не выводится устройством управления помощью при движении, и
устройство управления движением транспортного средства, выполненное с возможностью осуществления управления движением транспортного средства на основе траектории автономного вождения и траектории помощи при движении во втором состоянии, при котором неисправное устройство не существует, траектория автономного вождения выводится устройством управления автономным вождением, удовлетворяется заранее заданное целевое условие осуществления и траектория помощи при движении выводится устройством управления помощью при движении.
7. Система управления транспортным средством по п. 6, в которой устройство управления автономным вождением дополнительно выполнено с возможностью генерирования и вывода траектории аварийного режима, которая является второй целевой траекторией для замедления и остановки транспортного средства.
8. Система управления транспортным средством по п. 7, в которой устройство управления автономным вождением сконфигурировано для непрерывного обновления и вывода траектории аварийного режима.
9. Система управления транспортным средством по п. 7 или 8, в которой устройство управления движением транспортного средства сконфигурировано для остановки транспортного средства в третьем состоянии, в котором устройство управления автономным вождением является устройством, которое стало неисправным устройством во время первого состояния, посредством осуществления управления движением транспортного средства на основе траектории аварийного режима, выведенной устройством управления автономным вождением перед тем, как произошла неисправность.
10. Система управления транспортным средством по п. 9, в которой устройство управления движением транспортного средства сконфигурировано для остановки транспортного средства в четвертом состоянии, в котором устройство управления помощью при движении является устройством, которое во время третьего состояния стало также неисправным устройством, посредством осуществления управления движением транспортного средства на основе траектории аварийного останова, выведенной устройством управления помощью при движении перед тем, как произошла неисправность.
11. Система управления транспортным средством по п. 9, в которой устройство управления движением транспортного средства сконфигурировано для остановки транспортного средства в пятом состоянии, в котором удовлетворяется заранее заданное целевое условие осуществления и траектория помощи при движении выводится устройством управления помощью при движении во время третьего состояния, посредством осуществления управления движением транспортного средства на основе траектории помощи при движении и траектории аварийного останова, выводимых устройством управления помощью при движении.
12. Система управления транспортным средством по любому из пп. 6–8, в которой устройство управления движением транспортного средства сконфигурировано для остановки транспортного средства в шестом состоянии, в котором устройство управления помощью при движении является устройством, которое стало неисправным устройством во время первого состояния, посредством осуществления управления движением транспортного средства на основе траектории аварийного останова, выведенной устройством управления помощью при движении перед тем, как произошла неисправность.
13. Система управления транспортным средством по любому из пп. 6–8, в которой устройство управления движением транспортного средства сконфигурировано для остановки транспортного средства в седьмом состоянии, в котором устройство управления автономным вождением является устройством, которое стало неисправным устройством во время второго состояния, посредством осуществления управления движением транспортного средства на основе траектории помощи при движении и траектории аварийного останова, выводимых устройством управления помощью при движении.
14. Система управления транспортным средством по любому из пп. 6–8, в которой устройство управления движением транспортного средства сконфигурировано для остановки транспортного средства в восьмом состоянии, в котором устройство управления помощью при движении является устройством, которое стало неисправным устройством во время второго состояния, посредством осуществления управления движением транспортного средства на основе траектории аварийного останова, выведенной устройством управления помощью при движении перед тем, как произошла неисправность.
15. Система управления транспортным средством по п. 14, в которой устройство управления движением транспортного средства сконфигурировано для остановки транспортного средства в восьмом состоянии, посредством осуществления управления движением транспортного средства на основе траектории помощи при движении и траектории аварийного останова, выведенных устройством управления помощью при движении перед тем, как произошла неисправность.
16. Система управления транспортным средством по п. 6, в которой устройство управления движением транспортного средства сконфигурировано для остановки транспортного средства в девятом состоянии, в котором устройство управления автономным вождением является устройством, которое стало неисправным устройством во время первого состояния, посредством осуществления управления движением транспортного средства на основе траектории аварийного останова, выведенной устройством управления помощью при движении.
17. Система управления транспортным средством по любому из пп. 6–8, в которой устройство управления помощью при движении сконфигурировано для непрерывного обновления и вывода траектории аварийного останова.
| WO 2013046300 A1, 04.04.2013 | |||
| US 8700305 B2, 15.04.2014 | |||
| УСТРОЙСТВО ДЛЯ ОБЕСПЕЧЕНИЯ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ | 2016 |
|
RU2654839C2 |

