ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к улучшенной системе и способу экстренного торможения, которые разработаны для постепенного включения тормоза с целью остановки транспортного средства, даже если водитель не приводит в действие тормоз в тот момент, когда требуется экстренное торможение автомобилей.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Во многих транспортных средствах, таких как автомобили, коммерческие транспортные средства, тяжелые коммерческие транспортные средства и т.д., используются системы помощи вождения и безопасности. Одной из обычно используемых систем помощи вождения является система, которая представляет собой усовершенствованную систему экстренного торможения и известна как AEBS (усовершенствованная система экстренного торможения). Предметом настоящей заявки является система экстренного торможения, которая работает в соответствии с правилами и законодательством Европейского Союза.
Системы AEBS представляют собой системы помощи вождения, которые повышают безопасность вождения и предотвращают столкновение посредством автоматического торможения, когда возникают условия, в которых транспортное средство должно тормозить. Система AEB предупреждает водителя и автоматически включает тормоза, если расстояние с идущим впереди транспортным средством опасно сокращается, чтобы избежать столкновения, которое, как обнаруживается, неизбежно в случае сонливого водителя, или по другим причинам, которые приводят к тому, что водитель не реагирует на дорожную ситуацию, и взять под контроль транспортное средство. В частности, поскольку тяжелые, легкие и средние коммерческие транспортные средства часто используются на больших расстояниях, указанная система безопасности вождения является очень важной и является функцией безопасности для транспортных средств указанного типа. Сегодня многие автомобили оснащены системами автоматического экстренного торможения (AEBS). Многие из упомянутых систем имеют разные подходы и решения о том, как система AEB должна работать для обнаружения неизбежного столкновения, оценки риска столкновения, момента предупреждения и продолжительности, а также содержания предупреждения, чтобы привлечь внимание водителя и момент экстренного торможения во времени, продолжительности, величине замедления экстренного торможения, чтобы избежать столкновения или уменьшить скорость столкновения. В изобретении, являющемся предметом заявки, создается альтернатива упомянутым системам и предусматривается решение.
Система AEB обнаруживает неизбежное столкновение, когда расстояние до идущего впереди транспортного средства опасно сокращается посредством датчиков на транспортном средстве, и предотвращает столкновение при торможении. Упомянутое автоматическое экстренное торможение выполняется в три этапа; только звуковая фаза предупреждения, затем фаза звукового и тактильного предупреждения, а затем на последнем этапе фаза экстренного торможения. Как только система обнаруживает неизбежное столкновение, на первом этапе предупреждения упомянутого процесса, система выдает звуковое предупреждение в течение короткого периода времени, вплоть до одной или нескольких секунд. На втором этапе тормоза включаются на короткое время для того, чтобы дать тактильное предупреждение водителю, чтобы водитель обратил внимание на дорожную ситуацию. Если водитель не берет на себя управление транспортным средством, чтобы избежать столкновения, на третьем этапе для предотвращения столкновения применяется усовершенствованная система экстренного торможения.
Система AEBS использует выходные сигналы радара и датчика камеры, а также данные транспортного средства в качестве входных данных для расчета риска столкновения с препятствиями впереди, а после обнаружения неизбежного риска столкновения применяет трехфазное предупреждение и процедуру торможения, описанную выше, чтобы избежать столкновения. Существуют различные исследования, способы и системы AEB, содержащие эти способы с деталями, которые являются общедоступными. Эти исследования, способы и приложения отличаются друг от друга оценкой риска столкновения, расчетом начальной точки для первой фазы только для предупреждения, начальной точкой второй фазы предупреждения, где выдается тактильное предупреждение и звуковое предупреждение, начальной точкой фазы экстренного торможения, продолжительностью соответствующей фазы. Существуют различные расчеты того, когда должна начинаться последовательность экстренного торможения. Поскольку существуют различия в расчете риска столкновения, а также времени и степени торможения, которые должны применяться в используемых в настоящее время системах AEBS, каждая система может иметь преимущества и недостатки по сравнению друг с другом.
Отличия этой патентной заявки по сравнению с известными заявками системы AEB и соответствующими патентами в этой области по сравнению с этой заявкой перечислены ниже:
В патентном документе US2015066323 А1, включенном в существующий уровень техники, раскрыта система обеспечения экстренного торможения. В упомянутом документе, датчики скорости, объекта и ускорения обеспечивают данные для блока управления. Система обеспечивает поддержку тормоза до тех пор, пока относительная скорость между объектом столкновения и транспортным средством не снизится до нуля в соответствии с полученными данными. В то же время аналогичным образом проверяются и данные относительного ускорения. Однако документ не содержит описания способа расчета для определения риска столкновения и времени торможения.
В патентном документе US2015012204 A1, включенном в существующий уровень техники, описана система поддержки тормоза, и в упомянутой системе получены мгновенные относительные условия, и в систему передаются моменты торможения, ускорения и расстояния двух транспортных средств. Система работает путем получения необходимых данных посредством ряда уравнений, в которых скорости транспортного средства уравнены, а используются расстояния. Однако в упомянутом документе имеется только одно уравнение, используемое для охвата всех случаев, и всех фаз системы AEB, в отличие от нашей патентной заявки, где мы используем несколько уравнений для охвата различных случаев.
В патентном документе Германии DE 102005054064 А1, включенном в настоящий уровень техники, описан способ расчета на основе ускорения. В упомянутом документе, согласно изменениям ускорения, требуемые значения замедления рассчитываются для всех трех фаз системы AEB на основе тормозных путей, и рассчитанная информация отправляется в системы предупреждения и торможения на транспортном средстве. Однако в этом документе отсутствует подробная информация об интеграции данных для системы и использовании данных в системе.
В международном патентном документе WO 2004/028857 А1, включенном в существующий уровень техники, описана последовательность операций системы AEB; однако способ расчета не полностью объясняется математическими формулировками. В упомянутом документе предлагается, что значение времени предупреждения может было вычислено как переменная. В изобретении, являющемся предметом заявки, период предупреждения принимается за постоянный.
В патентном документе US 7425043 B2, включенном в существующий уровень техники, раскрыта общая последовательность торможения и способ расчета. В упомянутом документе, уравнения, относящиеся к вычислению тормозного момента, объясняются подробно. Разница в скорости и ускорении между данным транспортным средством и идущим впереди транспортным средством используется при расчете дистанции посредством этих уравнений. Тормозной момент может быть рассчитан с использованием упомянутых уравнений и данной блок-схемы. В рассматриваемом патенте используется совершенно другой способ и переменные для применения экстренного торможения и обнаружения опасности вождения.
В изобретении, являющемся предметом заявки, расстояние между данным транспортным средством (нашим транспортным средством) и идущим впереди транспортным средством и соответствующий запускающий момент определяются посредством вычисления времени, в которое скорости торможения данного транспортного средства и идущего впереди транспортного средства уравнены. Разница расстояний, пройденных данным транспортным средством и идущим впереди транспортным средством за время, прошедшее до тех пор, пока упомянутый уравнивающий момент не дает безопасного минимального расстояния отслеживания. Если расстояние между данным транспортным средством и идущим впереди транспортным средством меньше минимального расстояния отслеживания, запускается последовательность экстренного торможения. Выравнивание скоростей и расчеты пройденного расстояния рассчитываются с учетом точек линейного пересечения в трех временных интервалах.
ЦЕЛИ ИЗОБРЕТЕНИЯ
Целью данного изобретения является осуществление системы экстренного торможения и способа, который определяет, когда этапы предупреждения и торможения в процессе экстренного торможения начинаются с вычисления времени, в которое скорости данного транспортного средства и идущего впереди транспортного средства синхронизируются посредством торможения, и нахождения последовательности торможения путем вычисления времени, в которое упомянутые скорости выровнены.
Другой целью изобретения является создание системы экстренного торможения и способа, который инициирует последовательность экстренного торможения, когда расстояние между данным транспортным средством и идущим впереди транспортным средством меньше минимального расстояния отслеживания.
Другой целью изобретения является создание системы и способа экстренного торможения, которые позволяют вычислять самое последнее/минимальное расстояние для инициирования торможения посредством одного из шести различных алгоритмов в результате сравнения времени, прошедшего до скорости идущего впереди транспортного средства, равной нулю, и времени пройденного до тех пор, пока скорость данного транспортного средства не станет равной скорости идущего впереди транспортного средства.
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Для достижения цели настоящего изобретения, описываются система и способ экстренного торможения, как определено в первом пункте формулы изобретения и других пунктах формулы изобретения, которые являются зависящими от него. В способе экстренного торможения, если расстояние между транспортным средством и идущим впереди транспортным средством меньше предпочтительного расстояния, начинается последовательность торможения, и торможение выполняется в три этапа. Во время процесса торможения на первом этапе выдается звуковое и/или визуальное предупреждение, затем на этапе, называемом тактильным предупреждением, выполняется частичное торможение, и, если водитель не реагирует на этот процесс, реализуется третий этап, и автомобиль останавливается при полном торможении. В способе торможения очень важными являются расстояния, пройденные транспортным средством и идущим впереди транспортным средством, и разница между этими двумя расстояниями. Разница между упомянутыми двумя расстояниями определяется безопасным расстоянием отслеживания или расстоянием, на котором должно начинаться торможение на последнем этапе. Вместе со способом, подлежащим применению, решение приводится разным уравнением для каждого случая. Вместе со способом, подлежащим применению, безопасное расстояние отслеживания, другими словами, разница между расстоянием, пройденным идущим впереди транспортным средством и данным транспортным средством, определяется путем вычисления шести различных уравнений для различных ситуаций. Определения, какое из шести уравнений для решения безопасного расстояния отслеживания выполняется посредством отслеживания этапов процесса и потока. Порядок и уравнения для расчета упомянутого способа, предпочтительно, пересчитываются каждые 10 миллисекунд. Соответственно, безопасное расстояние отслеживания рассчитывается и обновляется мгновенно и непрерывно. Если расстояние между данным транспортным средством и идущим впереди транспортным средством меньше расчетного безопасного расстояния отслеживания, другими словами, если данное транспортное средство приближается к идущему впереди транспортному средству меньше безопасного расстояния отслеживания, начинается последовательность торможения.
Различные этапы выполняются на этапах процесса способа согласно изобретению. Одна из этих процедур состоит в том, чтобы проверить, тормозит ли идущее впереди транспортное средство или нет, и сравнить, на каком этапе транспортное средство впереди остановится с данным транспортным средством. Затем рассчитываются три отдельные продолжительности времени. Эти продолжительности используются для расчета скорости, момента (времени) и ступени данного транспортного средства во время остановки идущим впереди транспортным средством. Затем вычисляется время (момент), в который скорости двух транспортных средств равны. Определяется, на каком этапе отсутствует необходимость торможения посредством определения момента, когда скорости двух транспортных средств равны. Этап выбора достигается посредством просмотра различий между временем остановки идущего впереди транспортного средства и временем выравнивания, когда скорость данного транспортного средства равна скорости идущего впереди транспортного средства. На этом этапе определяется, какое безопасное расстояние отслеживания будет использоваться, в соответствии со сравнением времени остановки, которое меньше, или больше, или равно времени выравнивания.
Проверяется время остановки (t_still) идущего впереди транспортного средства. Если время остановки идущего впереди транспортного средства находится вне порядка торможения (после момента выравнивания скорости или никогда), выбирается одно из первых трех уравнений. Разделение этих трех уравнений выполняется в соответствии с этапом, на котором скорости данного транспортного средства и идущего впереди транспортного средства выровнены. Одно из трех уравнений выбирается в зависимости от того, равны ли скорости на этапе звукового/визуального предупреждения, на этапе тактильного (частичного торможения) или на этапе полного (экстренного) торможения или нет.
Если время остановки автомобиля впереди (t_still) находится в пределах последовательности торможения, то выбирается одно из трех других уравнений. Подобным образом, разделение этих трех уравнений выполняется согласно этапу, на котором скорости идущего впереди транспортного средства и данного транспортного средства выровнены. Одно из трех уравнений выбирается в зависимости от того, равны ли скорости на этапе звукового/визуального предупреждения, на этапе тактильного (частичного торможения) или на этапе полного (экстренного) торможения.
В упомянутых шести уравнениях равенства, которые вычисляют безопасное расстояние отслеживания, вычисляется разница между расстояниями, пройденными данным транспортным средством и идущим впереди транспортным средством. Если идущее впереди транспортное средство не останавливается в течение времени выравнивания скорости, безопасное расстояние отслеживания выбирается первыми тремя уравнениями равенства. Если оно останавливается, выбираются другие три уравнения равенства.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Система экстренного торможения и способ ее осуществления, реализованные для достижения цели настоящего изобретения, показаны на приложенных чертежах, на которых:
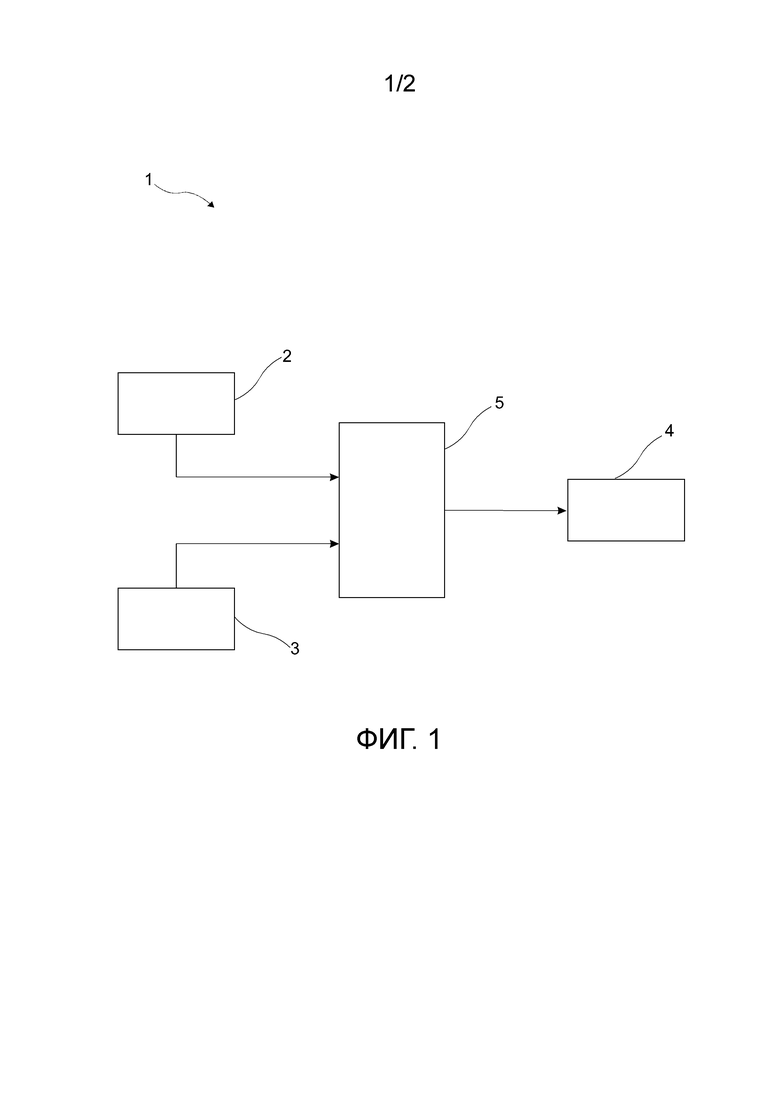
Фиг.1 представляет собой схематичный вид системы экстренного торможения.
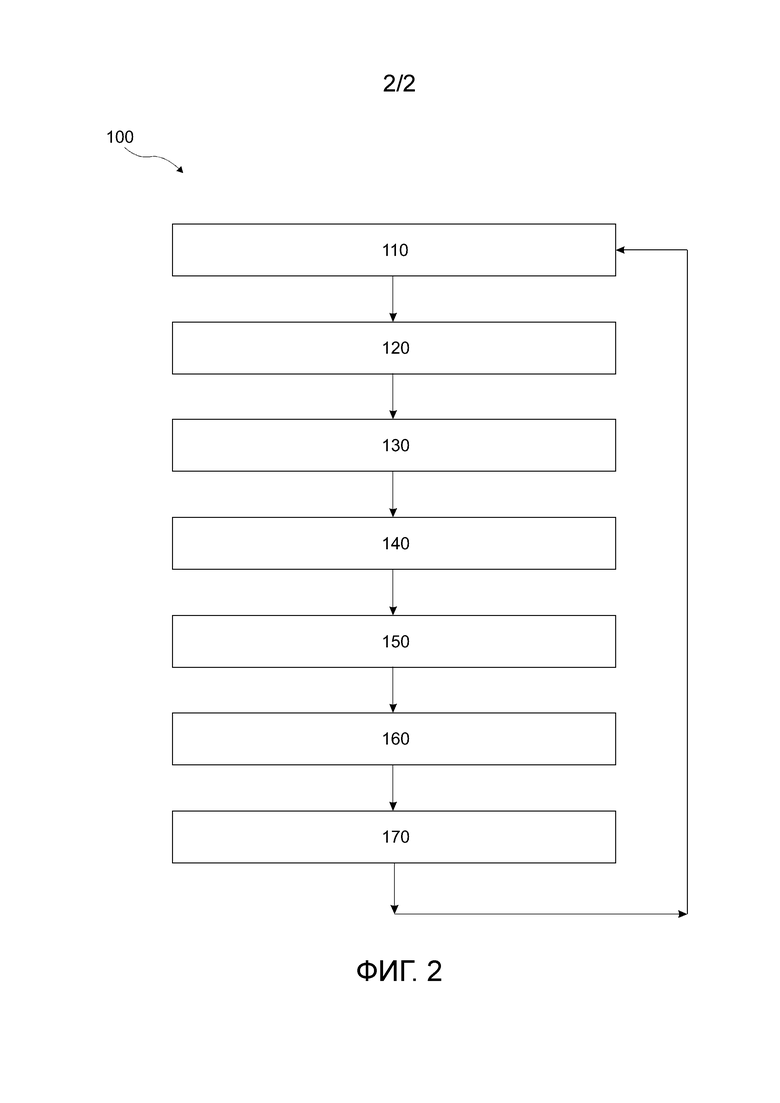
Фиг.2 представляет собой схематичный вид способа экстренного торможения.
Части на фигурах пронумерованы одна за другой, соответствующие номера приведены ниже.
1. Система экстренного торможения
2. Камера
3. Радар
4. Тормозной механизм
5. Блок управления
100. Способ экстренного торможения.
Система (1) экстренного торможения, которая разработана для постепенного торможения транспортного средства путем активации, даже если водитель не нажимает на педаль тормоза в тот момент, когда требуется экстренное торможение автомобилей, для расчета начала этапов предупреждения и торможения в процессе экстренного торможения, и для расчета времени, в которое синхронизированы скорость идущего впереди транспортного средства и данного транспортного средства, содержит:
- по меньшей мере, одну камеру (2), которая расположена в разных частях транспортного средства, принимающую обработанные изображения из окружающей среды и переднего участка транспортного средства,
- по меньшей мере, один радар (3), который предназначен для обнаружения идущих впереди транспортных средств, движущихся в одном направлении и полосе движения с данным транспортным средством, объектов в направлении движения данного транспортного средства, и для измерения расстояния между данным транспортным средством и упомянутым идущим впереди транспортным средством или объектов;
- по меньшей мере, один тормозной механизм (4), который имеет гидравлическую или электронную структуру, и который вызывает замедление или остановку транспортного средства под действием давления, приложенного к колесам транспортного средства, или изменения частоты вращения двигателя;
- по меньшей мере, один блок (5) управления, который предназначен для определения, находится ли идущее впереди транспортное средство перед данным транспортным средством, посредством обработки изображений, полученных с камеры (2), и значений измерения, полученных с радара (3), вычисления скорости идущего впереди транспортного средства, расстояния отслеживания между данным транспортным средством и идущим впереди транспортным средством, если упомянутое расстояние меньше безопасного расстояния отслеживания, инициирования трехступенчатой последовательности торможения посредством расчета времени, в которое скорость данного транспортного средства выровнена со скоростью идущего впереди транспортного средства, и продолжения процесса торможения, пока расстояние отслеживания не достигнет значения безопасного расстояния отслеживания.
Система (1) экстренного торможения представляет собой систему поддержки и безопасности водителя, которая используется для обеспечения безопасности вождения. Система (1) экстренного торможения может быть приведена в активную или пассивную форму. Если система экстренного торможения (1) активна, обнаружение идущего впереди транспортного средства производится камерой (2) и радаром (3). Расстояние отслеживания между транспортным средством/идущими впереди транспортными средствами непрерывно контролируется данными, полученными от камеры (2) и радара (3), и к данному транспортному средству применяется последовательность торможения, которая включает в себя определенные процессы, в случае, в случае, если безопасное вождение определено как опасное. Во время вождения, иногда водитель может потерять свое внимание, водитель может заснуть, или дистанция слежения за идущим впереди транспортным средством может принять опасную форму из-за некорректных движений других транспортных средств, поэтому безопасное вождение становится опасным. В таких случаях, система (1) экстренного торможения поддерживает дистанцию отслеживания между данным транспортным средством и идущим впереди транспортным средством на безопасном расстоянии вождения посредством автоматической активации, в некоторых случаях даже полной остановки данного транспортного средства.
В системе (1) экстренного торможения, процесс (последовательность) торможения и торможение осуществляются в три основных этапа. Этап предупреждения реализуется при запуске процесса торможения на первой ступени. Этап предупреждения, предпочтительно, является краткосрочным этапом, и упомянутый период может быть продлен предпочтительным образом. В варианте осуществления изобретения, период предупреждения, предпочтительно, составляет около одной секунды. В системе (1) экстренного торможения после обнаружения опасности, начинается первый этап автоматического торможения, и в течение приблизительно одной секунды выдается предупреждение. Упомянутое предупреждение может быть звуковым и световым предупреждением. Если водитель не реагирует на первом этапе предупреждения, начинается второй этап. На втором этапе процесса торможения используется тормозной механизм (4), и упомянутое предупреждение называется тактильным предупреждением. На втором этапе, чтобы дать небольшое предупреждение водителю, блок управления (5) приводит в действие тормозной механизм (4), чтобы обеспечить физическое (частичное) торможение, которое, предпочтительно, составляет приблизительно одну секунду. Если водитель не подает никакой реакции на физическое торможение во втором случае, инициируется третий этап. Третий этап называется этапом экстренного (полного) торможения. На этапе экстренного торможения, для остановки автомобиля, блок (5) управления позволяет полностью остановить данное транспортное средство с использованием тормозного механизма (4).
Камера (2), радар (3), тормозной механизм (4) и блок (5) управления, которые используются в системе (1) экстренного торможения согласно изобретению, предпочтительно, представляют собой стандартное используемое оборудование транспортного средства. Блок (5) управления, используемый в заявке на объект патента, предназначен для управления тормозным механизмом (4) посредством сигналов, полученных от камеры (2) и радара (3), и последующих значений измерения. Блок (5) управления, предпочтительно, является электронным блоком управления транспортного средства, называемым ECU. Блок (5) управления выполнен с возможностью определения, происходит ли небезопасное вождение, когда начинать торможение, когда переходить к этапам торможения, какие шаги следует выполнять на этапах торможения, когда завершать процесс торможения, и управления процессом торможения от начала до конца. Блок (5) управления, который управляет упомянутым процессом торможения, также выполняет некоторые этапы процесса. Блок (5) управления мгновенно контролирует движение, а когда безопасность вождения нарушается, он применяет способ (100) экстренного торможения. Работа блока (5) управления и управление системой (1) экстренного торможения включаются посредством способа (100) экстренного торможения.
Наиболее важными этапами способа (100) экстренного торможения являются принятие решения о том, что автоматическое торможение должно инициироваться, анализ времени начала торможения, начало торможения и завершение каждого этапа посредством перехода к последовательному торможению в последовательности торможения. Этапы способа (100) экстренного торможения определяют все процедуры и время указанной последовательности торможения.
Входные данные, используемые системой (1) экстренного торможения и ее способом (100), являются следующими:
v: скорость транспортного средства в метрах/секунду (м/с),
v_rel: относительная скорость идущего впереди транспортного средства в метрах/секунду (м/с),
а: ускорение транспортного средства в метрах/секундах в квадрате (м/с2),
a_rel: относительное ускорение идущего впереди транспортного средства (м/с2),
d: расстояние до идущего впереди транспортного средства в метрах (м),
a_NB: значение экстренного (полного) торможения в метрах в секунду в квадрате (м с2),
a_TB: предупреждение о тактильном торможении в метрах в секунду в квадрате (м/с2),
t_h: период тактильного предупреждения в секундах, (с),
t_oa: период аудио/визуального предупреждения в секундах (с).
Система (1) экстренного торможения и способ (100) генерируют запрос на торможение, величину и продолжительность торможения в качестве выходного сигнала в связи с вышеприведенными входными данными.
Переменные, которые используются системой (1) экстренного торможения и способом (100), являются следующими:
d_z: минимальное расстояние (минимальное расстояние отслеживания), оставшееся перед идущим впереди транспортным средством,
d_safe: безопасное расстояние отслеживания (в случае приближения к идущему впереди транспортному средству, превышающему это расчетное расстояние, должна начаться последовательность торможения),
v_v: скорость идущего впереди транспортного средства,
t_tc: время до столкновения,
a_v: ускорение идущего впереди транспортного средства,
a_rel_h: относительное ускорение при тактильном торможении,
t_w: общий период, который проходит до этапа экстренного торможения,
v_oa: скорость данного транспортного средства в конце этапа звукового предупреждения,
v_h: скорость данного транспортного средства в конце этапа тактильного предупреждения,
t_stop: время остановки транспортного средства (продолжительность между моментом начала последовательности торможения и моментом его остановки),
t_still: время остановки идущего впереди транспортного средства (если текущее ускорение продолжается, время, пока идущее впереди транспортное средство, достигнет неподвижной точки),
t_eq: расчетное время выравнивания скорости (время, когда скорость данного транспортного средства выравнивается с идущим впереди транспортным средством посредством торможения),
t_eq1: первое расчетное время выравнивания скорости,
t_eq2: второе расчетное время выравнивания скорости,
t_eq3: третье расчетное время выравнивания скорости,
t_eq_stage: информация об этапе торможения, на котором происходит реализация момента выравнивания скорости,
уравнение 1: первое уравнение равенства,
уравнение 2: второе уравнение равенства,
уравнение 3: третье уравнение равенства,
уравнение 4: четвертое уравнение равенства,
уравнение 5: пятое уравнение равенства,
уравнение 6: шестое уравнение равенства.
Способ (100) экстренного торможения для автомобилей, который позволяет автоматически тормозить транспортное средство, который срабатывает, когда расстояние между идущим впереди транспортным средством рассчитывается как меньшее, чем минимальное расстояние (d_z), позволяет определить время запуска для торможения путем вычисления времени, когда скорость данного транспортного средства и идущего впереди транспортного средства выровнены, инициирует торможение в упомянутое время, включает трехступенчатое (трехфазное) торможение в последовательности торможения, включающий этапы, при которых:
- получают (110) данные измерений с камеры (2) и радара (3), расположенного на транспортном средстве,
- вычисляют (120) время до его остановки, если последовательность торможения инициируется в соответствии с данными измерений, полученными от камеры (2) и радара (3) блоком (5) управления (если последовательность торможения началась),
- вычисляют (130) время, которое прошло до тех пор, пока скорость данного транспортного средства не выровняется с идущим впереди транспортным средством, в случае, если последовательность торможения инициируется в соответствии с данными измерений, полученными от камеры (2) и радара (3) посредством блока (5) управления (если началась последовательность торможения),
- обнаруживают (140), на котором этапе предупреждения/торможения происходит выравнивание скорости с идущим впереди транспортным средством,
- вычисляют (150) самое последнее и минимальное расстояние начала торможения (d_safe) посредством выбора одного из шести различных уравнений в соответствии с результатом сравнения того, реализован или нет этап предупреждения/торможения на момент выравнивания скорости, и реализован или нет в процессе торможения момент, когда идущее впереди транспортное средство достигает точки остановки,
- запускают (160) последовательность торможения, если измеренное мгновенно расстояние до идущего впереди транспортного средства меньше или равно расчетному минимальному начальному расстоянию торможения,
- возвращаются к началу, чтобы снова выполнить расчет, снова наблюдая (170) изменяющуюся динамику транспортного средства.
Способ (100) экстренного торможения составляет алгоритм работы блока (5) управления в системе (1) экстренного торможения. Блок (5) управления автоматически вызывает торможение автомобиля, чтобы обеспечить безопасное вождение и безопасное расстояние слежения посредством способа (100) экстренного торможения.
Согласно способу (100) экстренного торможения решают, в каком случае транспортное средство должно запустить трехступенчатую последовательность торможения, и затем начинают последовательность торможения. Вычисление требуемого времени запуска упомянутой последовательности торможения производится посредством вычисления расстояния и отслеживания времени.
Способ (100) экстренного торможения автоматически активируется во время движения транспортного средства; он работает непрерывно во время движения. Блок (5) управления непрерывно и мгновенно принимает данные измерений от камеры (2) и радара (3), которые расположены на транспортном средстве. Блок (5) управления мгновенно получает информацию о скорости данного транспортного средства, этого времени от датчика скорости транспортного средства или электронного блока управления транспортного средства. Блок (5) управления может определять, находится ли какое-либо транспортное средство впереди или нет, и, если находится, местоположение транспортного средства впереди посредством сигналов, полученных от камеры (2) и радара (3).
Когда блок (5) управления определяет относительную скорость (v-rel) идущего впереди транспортного средства, он получает мгновенную скорость транспортного средства посредством использования значений измерения, взятых с камеры (2) и радара (3). Блок (5) управления вычисляет относительную скорость (v_rel) идущего впереди транспортного средства посредством мгновенной скорости данного транспортного средства (V) и измеренных значений, полученных от камеры (2) и радара (3). На этапе (110) приема данных измерений, относительная скорость (v_rel) идущего впереди транспортного средства сравнивается со скоростью (V) данного транспортного средства. В случае, если относительная скорость идущего впереди транспортного средства относительно данного транспортного средства меньше нуля, то считается, что расстояние между транспортными средствами увеличено, и если скорость данного транспортного средства (наша скорость) больше, чем (V), то это означает, что идущее впереди транспортное средство приближается к данному транспортному средству с противоположной полосы движения. Упомянутые условия можно сформулировать следующим образом.
v_rel <= 0
v_rel >= v
В обоих случаях торможение не требуется, поэтому последовательность экстренного торможения не инициируется. Данные, полученные от камеры (2) и радара (3), продолжают обрабатываться, и следующий шаг не начинается.
Блок (5) управления получает данные относительно расстояния (d) до идущего впереди транспортного средства, информацию об относительной скорости (v_rel) идущего впереди транспортного средства, скорости (v) самого транспортного средства, ускорения (а) самого транспортного средства, относительное ускорение (a_rel) идущего впереди транспортного средства согласно данным, полученным с камеры (2) и радара (3). В альтернативном варианте осуществления изобретения, упомянутые данные принимаются непосредственно от идущего впереди транспортного средства посредством поддержания беспроводной связи с идущим впереди транспортным средством.
Для каждого этапа экстренного торможения, записанного в блоке управления (5), имеются такие параметры, как величина торможения и т.д. В соответствии с характеристиками транспортного средства в блоке (5) управления записываются все данные, такие как кривые остановочного торможения транспортного средства, параметры, продолжительности остановки, реакции на интенсивность торможения и длительности остановки и т.д. Блок (5) управления ищет решение вопроса «если я начал торможение во время расчета, когда моя скорость с идущим впереди транспортным средством будет равной», посредством сравнения и расчета с использованием торможения и остановки и т.п. данными транспортного средства.
Согласно данным измерений, принятыми от камеры (2) и радара (3), блок (5) управления вычисляет (120) время, которое проходит до остановки транспортного средства в случае начала последовательности торможения. Блок (5) управления определяет (120), меньше ли расстояние между идущим впереди транспортным средством и данным транспортным средством, чем безопасное расстояние отслеживания, или нет, согласно данным измерений, полученным с камеры (2) и радара (3). На этом этапе, время остановки (t-stop) данного транспортного средства вычисляется блоком (5) управления согласно этапу, когда данное транспортное средство останавливается. Время остановки (t_stop) транспортного средства соответствует времени, которое проходит от начального момента последовательности торможения до остановки транспортного средства. Поскольку способ (100) экстренного торможения состоит из трех этапов, блок (5) управления предоставляет отдельные решения для каждого из трех этапов. Впоследствии, безопасное расстояние отслеживания определяется по разнице между рассчитанными расстояниями, пройденными до момента остановки (t_stop) данным транспортным средством и идущим впереди транспортным средством.
На этапе (120) вычисления времени, которое проходит до остановки транспортного средства в случае начала последовательности торможения; если скорость данного транспортного средства в конце этапа звукового предупреждения (v-oa) меньше нуля или равна нулю, то время остановки (t_stop) данного транспортного средства определяется посредством деления скорости автомобиля на его ускорение. Этот процесс может быть сформулирован следующим образом.
v_oa<=0; t_stop = -v/a
На этапе (120) вычисления времени, которое истекает до остановки транспортного средства в случае начала последовательности торможения; если скорость данного транспортного средства (v_h) равна нулю или меньше нуля на этапе тактильного предупреждения, скорость остановки транспортного средства (t_stop) определяется путем деления скорости транспортного средства (v_oa) в конце этапа звукового сигнала предупреждения на тактильное значение предупреждения о торможении (a_TB) и добавления длительности аудио/визуального предупреждения (t_oa) к полученному результату. Этот процесс может быть сформулирован следующим образом.
v_h<=0; t_stop=t_oa+(-v_oa/a_TB)
Время (t_stop) остановки транспортного средства рассчитывается следующим образом; добавляются длительность (t_oa) звукового/визуального предупреждения и длительность (t_h) тактильного предупреждения, и к этой длительности добавляется время, полученное путем деления скорости данного транспортного средства в конце этапа тактильного предупреждения на величину экстренного торможения. Время остановки транспортного средства (t_stop) формулируется следующим образом.
t_stop=t_oa+t_h+(-v_h/a_NB)
Согласно данными измерения, блок (5) управления вычисляет (130) время, которое проходит до тех пор, пока скорость с идущим впереди транспортным средством не будет выровнена в случае начала последовательности торможения. На упомянутом этапе вычисляется время выравнивания, которое соответствует моменту, когда скорости идущего впереди транспортного средства и данного транспортного средства выравниваются. При выполнении расчета на этом этапе, снова имеются три рассматриваемых этапа; этап звукового предупреждения, этап тактильного предупреждения (частичное торможение) и этап экстренного торможения (окончательное полное торможение). Способ (100) экстренного торможения рассчитывает три отдельных времени выравнивания скорости. Среди упомянутых трех отдельных времен выравнивания, первое представляет собой (t_eq1), второе - (t_eq2), а третье - (t_eq3), и они рассчитываются по следующим различным формулам.
t_eq1= (v-v_v)/(a_v-a);
t_eq2 = (v_v-v-a*t_oa+a_TB*t_oa)/(a_TB-a_v);
t_eq3=(v_v-v-a*t_oa-a_TB*t_h+a_NB*t_w)/(a_NB-a_v);
Вместе с упомянутыми тремя отдельными уравнениями, вычисляются три отдельных момента времени, которые проходят до тех пор, пока скорость данного автомобиля не выровняется с идущим впереди транспортным средством, и этапы процесса выполняются путем выбора одного из этих времен выравнивания. Значение t_eq1 показывает время выравнивания скорости в случае, если выравнивание скорости находится на этапе звукового предупреждения, значение t_eq2 показывает время выравнивания в случае, если выравнивание скорости находится на этапе тактильного предупреждения, а значение t_eq3 показывает время выравнивания скорости, которое должно быть рассчитано в случае, когда выравнивание скорости реализуется на последнем этапе экстренного торможения. Чтобы выбрать одно из этих времен, используются следующие уравнения и предположения.
t_eq3 > t_w; t_eq_stage=3; t_eq=t_eq3;
t_eq2 > t_oa ve t_eq2 <= t_w ise t_eq_stage=2; t_eq=t_eq2;
t_eq1 > 0 ve t_eq1 <= t_oa ise t_eq_stage=1; t_eq=t_eq1;
t_eq_stage=0; t_eq = -1;
Этап выравнивания скорости (t_eq_stage) определяется в результате сравнения соответственно значений t_eq1, t_eq2 и t_eq3 с t_w (t_h+t_oa общая продолжительность предупреждения), t_oa (длительность тактильного предупреждения).
Блок (5) управления сравнивает (140) время, которое проходит до остановки идущего впереди транспортного средства, и время, которое проходит до тех пор, пока скорость данного транспортного средства не станет равной скорости идущего впереди транспортного средства. Блок (5) управления проверяет момент, когда скорости идущего впереди транспортного средства и данного транспортного средства выровнены. Изменения в скорости транспортных средств, возможно, должны интерпретироваться по-разному. Данное транспортное средство также может тормозить, но отрицательное ускорение действует до тех пор, пока данное транспортное средство не остановится. В этом случае момент выравнивания скорости двух транспортных средств не может возникнуть после времени остановки данного транспортного средства.
На этапе (140) сравнивается время, которое проходит до момента остановки идущего впереди транспортного средства, со временем, которое проходит до тех пор, пока скорость данного транспортного средства не станет равной идущему впереди транспортному средству; оцененное время (t_eq) выравнивания скорости и время (t_stop) остановки данного транспортного средства сравниваются. Расчетное время (t_eq) выравнивания скорости дает момент, в который скорость данного транспортного средства выравнивается с идущим впереди транспортным средством посредством торможения. Проверяется, является ли расчетное время (t_eq) выравнивания скорости больше, меньше или равно времени (t_stop) остановки данного транспортного средства. Формулы сравнения, сделанные на упомянутом этапе, являются следующими.
t_eq > t_stop; t_eq = -1; t_eq=t_stop
После того, как время остановки идущего впереди транспортного средства сравнивается (140) со временем, которое проходит до тех пор, пока скорость данного транспортного средства не становится равной скорости идущего впереди транспортного средства, вычисление (150) последнего и минимального расстояния (d_safe) начала торможения рассчитывается путем выбора одного из шести различных уравнений на основе результата сравнения. Безопасное расстояние (d_safe) отслеживания представляет собой переменную, которая определяет начало последовательности торможения в случае, если расстояние до идущего впереди транспортного средства ближе, чем рассчитанное расстояние. На этапе вычисления (150) самого последнего и минимального расстояния начала торможения, прежде всего, контролируется время (t_still) остановки идущего впереди транспортного средства. В случае, если идущее впереди транспортное средство продолжает свое текущее ускорение, время (t_still) остановки идущего впереди транспортного средства дает продолжительность, пока оно не перейдет в положение покоя. Если время (t_still) остановки идущего впереди транспортного средства выходит за пределы последовательности торможения, то выбирается одно из первых трех уравнений. Расчет производится путем выбора того, которое обеспечивает подходящий момент выравнивания скорости среди трех уравнений. Если время (t_still) остановки идущего впереди транспортного средства находится в пределах последовательности торможения, выбирается одно из трех других уравнений. Хотя выбирается одно из трех упомянутых уравнений, выбор уравнения выполняется посредством определения диапазона, который соответствует расчетному времени (t_eq) выравнивания скорости в последовательности.
Время (t_still) остановки идущего впереди транспортного средства определяется в пределах или за пределами последовательности торможения в соответствии со следующей формулой.
a_v < 0; t_still = -v_v/a_v;
t_still=бесконечность (бесконечно большое)
t_still < 0; t_still > t_eq
Если ускорение (a_v) идущего впереди транспортного средства меньше нуля, время (t_still) остановки идущего впереди транспортного средства получается посредством деления скорости (v_v) идущего впереди транспортного средства на ускорение (a_v) идущего впереди транспортного средства. После того, как время (t_still) остановки идущего впереди транспортного средства вычислено, блок (5) управления определяет, является ли время (t_still) остановки идущего впереди транспортного средства меньше нуля или нет, и является ли оно больше, чем расчетное время (t_eq) выравнивания скорости или нет.
Если время (t_still) остановки находится за пределами последовательности торможения, выбирается одно из трех уравнений. Если время (t_still) остановки транспортного средства меньше нуля и больше, чем расчетное время (t_eq) выравнивания скорости, выбирается одно из уравнений среди первого уравнения равенства (уравнение 1) или второго уравнения равенства (уравнение 2) или третьего уравнения равенства (уравнение 3).
Уравнение 1 выглядит следующим образом, и если выбрано уравнение 1, то реализуются следующие процессы. Если расчетное время (t_eq) выравнивания скорости больше, чем общая продолжительность (t_w), которая проходит до этапа экстренного торможения (t_eq> t_w), то используется упомянутое первое уравнение равенства (уравнение 1).
d_safe=v*t_oa+0.5*a*t_oa^2+v_oa*t_h+ 0.5*a_TB*t_h^2+v_h*(t_eq-t_w)+ 0.5*a_NB*(t_eq-t_w)^2+d_z - (v_v*(t_eq)+0.5*a_v*(t_eq)^2);
Выравнивание скорости в этой формуле при условии t_eq> t_w (выравнивание во время этапа экстренного торможения) решается кинематическими уравнениями разности между расстоянием, пройденным данным транспортным средством, и расстоянием, пройденным идущим впереди транспортным средством.
Уравнение 2 выглядит следующим образом, и если выбрано уравнение 2, то реализуются следующие процессы. Если расчетное время (t_eq) выравнивания скорости больше, чем общая продолжительность (t_w), которая проходит до этапа экстренного торможения (t_eq> t_w), или если оно равно (t_eq <= t_w) и если расчетное время (t_eq) выравнивания скорости больше (t_eq> t_oa), чем период звукового/визуального предупреждения (t_oa), тогда используется второе уравнение равенства (уравнение 2).
d_safe=v*t_oa+0.5*a*t_oa^2+v_oa*(t_eq-t_oa)+0.5*a_TB*(t_eq-t_oa)^2+d_z -(v_v*(t_eq)+0.5*a_v*(t_eq)^2);
Выравнивание скорости в этой формуле при условии t_eq <= t_w и t_eq > t_oa (выравнивание во время этапа тактильного предупреждения) решается кинематическими уравнениями разности между расстоянием, пройденным данным транспортным средством, и расстоянием, пройденным идущим впереди транспортным средством.
Уравнение 3 выглядит следующим образом, и если выбрано уравнение 3, то реализуются следующие процессы. Если расчетное время (t_eq) выравнивания скорости больше нуля (t_eq> 0) и если расчетное время (t_eq) выравнивания скорости меньше или равно (t_eq <= t_oa) периоду звукового/визуального предупреждения (t_oa), затем используется третье уравнение равенства (уравнение 3).
d_safe=v*t_eq+0.5*a*t_eq^2+d_z -(v_v*(t_eq)+0.5*a_v*(t_eq)^2);
Выравнивание скорости в этой формуле при условии t_eq > 0 and t_eq <= t_oa (выравнивание во время этапа звукового предупреждения) решается кинематическими уравнениями разности между расстоянием, пройденным данным транспортным средством, и расстоянием, пройденным идущим впереди транспортным средством.
Если время (t_still) остановки находится в пределах последовательности торможения, выбирается одно из других трех уравнений. Если время (t_still) остановки транспортного средства меньше нуля и не больше, чем расчетное время (t_eq) выравнивания скорости, выбирается одно из четвертого уравнения равенства (уравнение 4) или пятого уравнения равенства (уравнение 5) или шестого уравнения равенства (уравнение 6).
Уравнение 4 выглядит следующим образом, и если выбрано уравнение 4, то реализуются следующие процессы. Если расчетное время (t_eq) выравнивания скорости больше, чем общая продолжительность (t_w), которая проходит до этапа экстренного торможения (t_eq > t_w), то используется упомянутое четвертое уравнение равенства (уравнение 4).
d_safe=v*t_oa+0.5*a*t_oa^2+v_oa*t_h+ 0.5*a_TB*t_h^2+v_h*(t_eq-t_w)+ 0.5*a_NB*(t_eq-t_w)^2+d_z - (v_v*(t_still) +0.5*a_v*(t_still)^2);
Уравнение 5 выглядит следующим образом, и если выбрано уравнение 5, то реализуются следующие процессы. Если расчетное время (t_eq) выравнивания скорости меньше или равно общему периоду (t_w), который проходит до этапа экстренного торможения (t_eq <= t_oa), и если расчетное время (t_eq) выравнивания скорости больше, чем период (t_oa) звукового/визуального предупреждения (t_eq > t_oa), тогда используется пятое уравнение равенства (уравнение 5).
d_safe=v*t_oa+0.5*a*t_oa^2+v_oa*(t_eq-t_oa)+0.5*a_TB*(t_eq-t_oa)^2+d_z -(v_v*(t_still)+0.5*a_v*(t_still)^2);
Уравнение 6 выглядит следующим образом, и если выбрано уравнение 6, то реализуются следующие процессы. Если расчетное время (t_eq) выравнивания скорости больше нуля (t_eq> 0) и если расчетное время (t_eq) выравнивания скорости меньше или равно (t_eq <= t_oa) периоду звукового/визуального предупреждения, затем используется шестое уравнение равенства (уравнение 6).
Уравнение 6
d_safe=v*t_eq+0.5*a*t_eq^2+d_z -(v_v*(t_still) + 0.5*a_v*(t_still)^2);
Безопасное расстояние (d_safe) отслеживания рассчитывается (150) посредством выбора одного из шести уравнений равенства в зависимости от того, находится ли время (t_still) остановки в последовательности торможения или нет. Во время движения, если измеренное расстояние (d_z) до идущего впереди транспортного средства меньше или равно расчетному минимальному расстоянию начала торможения (d_safe), начинается последовательность торможения (160). Когда начинается последовательность торможения (160), блок (5) управления обеспечивает торможение, которое должно выполняться в три этапа, соответственно. После того, как начинается последовательность торможения (160), на первом этапе выдается звуковое/визуальное предупреждение. Период (t_oa) звукового/визуального предупреждения продолжается в течение приблизительно одной секунды. В случае отсутствия ответа от водителя в течение упомянутого периода предупреждения (t_oa), инициируется второй этап, который является этапом тактильного предупреждения. Блок (5) управления позволяет транспортному средству выполнять предупреждающее торможение посредством тормозного механизма (4) в течение периода (t_h) тактильного предупреждения на этапе тактильного предупреждения. Период (t_h) тактильного предупреждения, предпочтительно, составляет приблизительно одну секунду, и в течение упомянутого периода времени (t_h) физический тормоз применяется к транспортному средству. Если водитель не дает никакого ответа на этапе тактильного предупреждения, запускается третий этап, и блок (5) управления позволяет полностью остановить транспортное средство, используя тормозной механизм (4). Соответственно, определяется период необходимого экстренного торможения, водителю выдается двухступенчатое предупреждение, чтобы водитель реагировал, и если водитель не дает никакого ответа, то транспортное средство полностью останавливается автоматически.
После того, как последовательность торможения инициирована и завершена (160), измененная динамика транспортного средства пересматривается (170) посредством повторного применения первого этапа (110), и затем способ (100) экстренного торможения перезапускается.
Безопасное расстояние отслеживания между идущим впереди транспортным средством и данным транспортным средством непрерывно измеряется мгновенно посредством способа (100) в зависимости от применения. Последовательность торможения запускается в зависимости от того, тормозит ли идущее впереди транспортное средство или нет, и если тормозит, останавливается ли оно или нет. Соответственно, возможно независимое от водителя экстренное торможение транспортного средства.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ СВОЕВРЕМЕННОГО ИНИЦИИРОВАНИЯ ПРОЦЕССА АВТОМАТИЧЕСКОГО АВАРИЙНОГО ТОРМОЖЕНИЯ И УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2021 |
|
RU2828924C1 |
| БЕСПИЛОТНОЕ ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ УПРАВЛЕНИЯ ЕГО ДВИЖЕНИЕМ | 2022 |
|
RU2809334C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ОТСЛЕЖИВАНИЯ ОБЪЕКТОВ | 2022 |
|
RU2814813C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ОПРЕДЕЛЕНИЯ ОБЪЕКТОВ | 2022 |
|
RU2806452C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2015 |
|
RU2625702C2 |
| Способ предотвращения столкновений со встречным препятствием на полосе движения | 2022 |
|
RU2788652C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО С СИСТЕМОЙ ИДЕНТИФИКАЦИИ | 2009 |
|
RU2531115C2 |
| СИСТЕМА АДАПТИВНОГО КРУИЗ-КОНТРОЛЯ И СПОСОБ АДАПТИВНОГО КРУИЗ-КОНТРОЛЯ, ПОДДЕРЖИВАЮЩИЕ РАСПОЗНАВАНИЕ СИГНАЛОВ СВЕТОФОРА | 2020 |
|
RU2790742C1 |
| СИСТЕМА ПОМОЩИ ВОДИТЕЛЮ | 2022 |
|
RU2793009C1 |
| СПОСОБ ПОСТРОЕНИЯ ДИНАМИЧЕСКОЙ ОГИБАЮЩЕЙ ЛИНИИ ШАХТНОГО ЭЛЕКТРОВОЗА | 2022 |
|
RU2818602C1 |
Предложен способ, который вычисляет момент времени для запуска системы экстренного торможения, которая состоит из трех предупреждений и фаз торможения в случае обнаружения неизбежности столкновения с идущим впереди транспортным средством. Достигается повышение надежности. 14 з.п. ф-лы, 2 ил.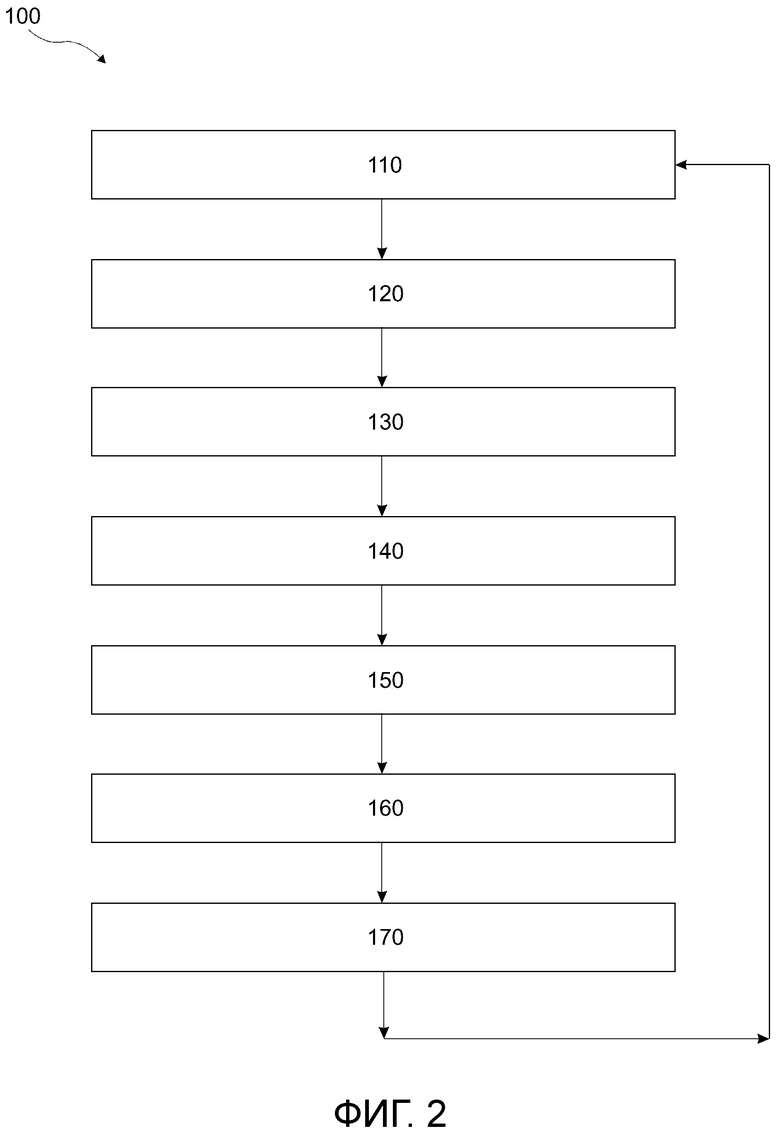
1. Способ (100) экстренного торможения для автомобилей, который позволяет автоматически тормозить транспортное средство, и который срабатывает, когда расстояние между идущим впереди транспортным средством рассчитывается как меньшее, чем минимальное расстояние (d_z), позволяет определить время запуска для торможения путем вычисления времени, когда скорость данного транспортного средства и идущего впереди транспортного средства выровнены, инициирует торможение в упомянутое время, включает трехфазное торможение в последовательности торможения, при этом способ включает следующие этапы, на которых:
- получают (110) данные измерений с камеры (2) и радара (3), расположенного на транспортном средстве,
- вычисляют (120) время до его остановки, если последовательность торможения инициируется согласно данным измерений, полученным от камеры (2) и радара (3) блоком (5) управления, если последовательность торможения началась, и отличается тем, что
- вычисляют (130) время, которое пройдет до тех пор, пока скорость данного транспортного средства не выровняется с идущим впереди транспортным средством, в случае, если последовательность торможения инициируется в соответствии с данными измерений, полученными от камеры (2) и радара (3) посредством блока (5) управления, если началась последовательность торможения,
- обнаруживают (140), на котором этапе предупреждения/торможения происходит выравнивание скорости с транспортным средством впереди,
- вычисляют (150) самое последнее и минимальное расстояние начала торможения (d_safe) посредством выбора одного из шести различных уравнений:
уравнение 1: d_safe=v*t_oa+0.5*a*t_oa^2+v_oa*t_h+ 0.5*a_TB*t_h^2+v_h*(t_eq-t_w)+ 0.5*a_NB*(t_eq-t_w)^2+d_z - (v_v*(t_eq)+0.5*a_v*(t_eq)^2);
уравнение 2: d_safe=v*t_oa+0.5*a*t_oa^2+v_oa*(t_eq-t_oa)+0.5*a_TB*(t_eq-t_oa)^2+d_z -(v_v*(t_eq)+0.5*a_v*(t_eq)^2;
уравнение 3: d_safe=v*t_eq+0.5*a*t_eq^2+d_z -(v_v*(t_eq)+0.5*a_v*(t_eq)^2);
уравнение 4: d_safe=v*t_oa+0.5*a*t_oa^2+v_oa*t_h+ 0.5*a_TB*t_h^2+v_h*(t_eq-t_w)+ 0.5*a_NB*(t_eq-t_w)^2+d_z - (v_v*(t_still) +0.5*a_v*(t_still)^2);
уравнение 5: d_safe=v*t_oa+0.5*a*t_oa^2+v_oa*(t_eq-t_oa)+0.5*a_TB*(t_eq-t_oa)^2+d_z -(v_v*(t_still)+0.5*a_v*(t_still)^2);
уравнение 6: d_safe=v*t_eq+0.5*a*t_eq^2+d_z -(v_v*(t_still) + 0.5*a_v*(t_still)^2)
в соответствии с результатом сравнения того, реализован или нет этап предупреждения/торможения на момент выравнивания скорости, и реализован или нет в процессе торможения момент, когда идущее впереди транспортное средство достигает точки остановки,
- запускают (160) последовательность торможения, если измеренное мгновенно расстояние до идущего впереди транспортного средства меньше или равно расчетному минимальному начальному расстоянию торможения,
- возвращаются к началу, чтобы снова выполнить расчет, снова наблюдая (170) изменяющуюся динамику транспортного средства,
при этом переменные, используемые в уравнениях, являются следующими:
v: скорость транспортного средства в метрах/секунду (м/с),
v_rel: относительная скорость идущего впереди транспортного средства в метрах/секунду (м/с),
а: ускорение транспортного средства в метрах/секундах в квадрате (м/с2),
a_rel: относительное ускорение идущего впереди транспортного средства (м/с2),
d: расстояние до идущего впереди транспортного средства в метрах (м),
a_NB: значение экстренного (полного) торможения в метрах в секунду в квадрате (м/с2),
a_TB: предупреждение о тактильном торможении в метрах в секунду в квадрате (м/с2),
t_h: период тактильного предупреждения в секундах, (с),
t_oa: период аудио/визуального предупреждения в секундах (с),
d_z: минимальное расстояние, оставшееся перед идущим впереди транспортным средством,
d_safe: безопасное расстояние отслеживания,
v_v: скорость идущего впереди транспортного средства,
t_tc: время до столкновения,
a_v: ускорение идущего впереди транспортного средства,
a_rel_h: относительное ускорение при тактильном торможении,
t_w: общий период, который проходит до этапа экстренного торможения,
v_oa: скорость данного транспортного средства в конце этапа звукового предупреждения,
v_h: скорость данного транспортного средства в конце этапа тактильного предупреждения,
t_stop: время остановки транспортного средства (продолжительность между моментом начала последовательности торможения и моментом его остановки),
t_still: время остановки идущего впереди транспортного средства,
t_eq: расчетное время выравнивания скорости.
2. Способ (100) экстренного торможения по п.1, отличающийся тем, что: на этапе вычисления (130) времени, которое проходит до тех пор, пока скорость не будет выровнена с идущим впереди транспортным средством, если начата последовательность торможения, вычисляют три разных времени выравнивания скорости для этапа звукового предупреждения, этапа тактильного предупреждения и этапа экстренного торможения и используют только одно из упомянутых времен.
3. Способ (100) экстренного торможения по п.2, отличающийся тем, что: на этапе вычисления (130) времени, которое проходит до тех пор, пока скорость не будет выровнена с идущим впереди транспортным средством, если начата последовательность торможения, вычисляют первое оцененное время выравнивания скорости (t_eq1) посредством уравнения (v-v_v) / (a_v-a); второе расчетное время выравнивания скорости (t_eq2) посредством уравнения (v_v-v-a * t_oa+a_TB * t_oa) / (a_TB-a_v); третье расчетное время выравнивания скорости (t_eq3) посредством уравнения (v_v-v-a * t_oa+a_TB * t_oa) / (a_TB-a_v).
4. Способ (100) экстренного торможения по п.1, отличающийся тем, что на этапе определения (140), на каком этапе предупреждения/торможения происходит выравнивание скорости с идущим впереди транспортным средством, сравнивают расчетное время (t_eq) выравнивания скорости со временем (t_stop) остановки транспортного средства, определяют, является ли расчетное время (t_eq) выравнивания скорости большим или равным времени (t_stop) остановки транспортного средства.
5. Способ (100) экстренного торможения по п.1, отличающийся тем, что на этапе вычисления (150) самого последнего и минимального расстояния (d_safe) начала торможения посредством выбора одного из шести различных уравнений контролируют время (t_still) остановки идущего впереди транспортного средства, если время (t_still) остановки идущего впереди транспортного средства находится за пределами последовательности торможения, выбирают одно из уравнения 1, или уравнения 2, или уравнения 3.
6. Способ (100) экстренного торможения по п.1, отличающийся тем, что на этапе вычисления (150) самого последнего и минимального расстояния (d_safe) начала торможения посредством выбора одного из шести различных уравнений контролируют время (t_still) остановки идущего впереди транспортного средства, если время (t_still) остановки идущего впереди транспортного средства находится в пределах последовательности торможения, выбирают одно из уравнения 4, или уравнения 5, или уравнения 6.
7. Способ (100) экстренного торможения по п.1, отличающийся тем, что на этапе вычисления (150) самого последнего и минимального расстояния (d_safe) начала торможения посредством выбора одного из шести различных уравнений, вместе с определением диапазона в последовательности, который соответствует расчетному моменту времени (t_eq) выравнивания скорости, выбирают одно из уравнения 1, уравнения 2, или уравнения 3, или уравнения 4, или уравнения 5, или уравнения 6.
8. Способ (100) экстренного торможения по п.1, отличающийся тем, что на этапе вычисления (150) самого последнего и минимального расстояния (d_safe) начала торможения посредством выбора одного из указанных шести различных уравнений, если ускорение (a_v) идущего впереди транспортного средства меньше нуля, определяют время (t_still) остановки транспортного средства посредством деления скорости (v_v) идущего впереди транспортного средства на ускорение (a_v) впереди идущего транспортного средства.
9. Способ (100) экстренного торможения по п.1, отличающийся тем, что на этапе вычисления (150) самого последнего и минимального расстояния (d_safe) начала торможения посредством выбора одного из указанных шести различных уравнений, после вычисления времени (t_still) остановки транспортного средства блок (5) управления сравнивает, является ли время (t_still) остановки транспортного средства меньше нуля или нет и больше, чем расчетное время (t_eq) выравнивания скорости или нет.
10. Способ (100) экстренного торможения по п.5, отличающийся тем, что на этапе вычисления (150) самого последнего и минимального расстояния (d_safe) начала торможения посредством выбора одного из указанных шести различных уравнений, если расчетное время (t_eq) выравнивания скорости больше, чем общий период (t_w), который проходит до этапа экстренного торможения (t_eq> t_w), вычисляют минимальное расстояние (d_safe) инициирования торможения посредством упомянутого уравнения 1.
11. Способ (100) экстренного торможения по п.5, отличающийся тем, что на этапе вычисления (150) самого последнего и минимального расстояния (d_safe) начала торможения посредством выбора одного из указанных шести различных уравнений, если расчетное время (t_eq) выравнивания скорости меньше, чем или равно общему периоду (t_w), который проходит до этапа экстренного торможения (t_eq <= t_w), и если расчетное время (t_eq) выравнивания скорости больше (t_eq > t_oa), чем период (t_oa) звукового/визуального предупреждения, вычисляют минимальное расстояние (d_safe) инициирования торможения посредством упомянутого уравнения 2.
12. Способ (100) экстренного торможения по п.5, отличающийся тем, что на этапе вычисления (150) самого последнего и минимального расстояния (d_safe) начала торможения посредством выбора одного из указанных шести различных уравнений, если расчетное время (t_eq) выравнивания скорости больше чем ноль (t_eq>0), и если расчетное время (t_eq) выравнивания скорости меньше чем или равно (t_eq <= t_oa) периоду (t_oa) звукового/визуального предупреждения, вычисляют минимальное расстояние (d_safe) инициирования торможения посредством упомянутого уравнения 3.
13. Способ (100) экстренного торможения по п.6, отличающийся тем, что на этапе вычисления (150) самого последнего и минимального расстояния (d_safe) начала торможения посредством выбора одного из шести различных уравнений, если расчетное время (t_eq) выравнивания скорости больше, чем общий период (t_w), который проходит до этапа экстренного торможения (t_eq > t_w), вычисляют минимальное расстояние (d_safe) инициирования торможения посредством упомянутого уравнения 4.
14. Способ (100) экстренного торможения по п.6, отличающийся тем, что на этапе вычисления (150) самого последнего и минимального расстояния (d_safe) начала торможения посредством выбора одного из указанных шести различных уравнений; если расчетное время (t_eq) выравнивания скорости меньше чем или равно общему периоду (t_w), который проходит до этапа экстренного торможения (t_eq <= t_w), и если расчетное время (t_eq) выравнивания скорости больше, чем период (t_oa) звукового/визуального предупреждения (t_eq > t_oa), вычисляют минимальное расстояние (d_safe) инициирования торможения посредством упомянутого пятого уравнения 5.
15. Способ (100) экстренного торможения по п.5, отличающийся тем, что на этапе вычисления (150) самого последнего и минимального расстояния (d_safe) начала торможения посредством выбора одного из указанных шести различных уравнений, если расчетное время (t_eq) выравнивания скорости больше чем ноль (t_eq>0), и если расчетное время (t_eq) выравнивания скорости меньше чем или равно (t_eq <= t_oa) периоду (t_oa) звукового/визуального предупреждения, вычисляют минимальное расстояние (d_safe) инициирования торможения посредством упомянутого уравнения 6.
| СИСТЕМА ПОДГОТОВКИ ВОЗДУХА | 2024 |
|
RU2835292C1 |
| US2018086263A1, 29.03.2018 | |||
| US2012239265A1, 20.09.2012. | |||

