ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННУЮ ЗАЯВКУ
Настоящая заявка испрашивает приоритет согласно заявке на патент Китая № 201911115160.X, поданной 14 ноября 2019 года, содержание которой целиком включено в настоящий документ посредством ссылки.
ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к области техники автоматического вождения и «умной» системе управления транспортом, и, в частности, к системе адаптивного круиз-контроля, поддерживающей распознавание сигналов светофора, и способу адаптивного круиз-контроля, поддерживающего распознавание сигналов светофора.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
С ростом популярности усовершенствованных вспомогательных систем вождения вождение людьми транспортных средств для перемещения стало более безопасным и удобным, а поведение при вождении – более рациональным и единообразным. В качестве важного компонента усовершенствованной вспомогательной системы вождения система адаптивного круиз-контроля (Adaptive Cruise Control, ACC) обеспечивает транспортному средству возможность интеллектуального выбора между движением на заданной скорости, следованием или торможением в зависимости от ситуации, опосредованной впереди идущим транспортным средством, в соответствии с тем, что выявлено радаром миллиметрового диапазона, так чтобы частота несчастных случаев, связанных с транспортными средствами, была сведена к нулю или снижена.
Однако существующая система АСС, реализованная с помощью радаров миллиметрового диапазона, не может распознавать световые сигналы светофора (далее называемые в настоящем документе сигналами светофора), так что когда водитель находится в состоянии стресса или невнимателен, вероятность нарушения водителем сигналов светофора весьма значительна, и вероятность транспортного происшествия чрезвычайно велика.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Учитывая сказанное, целью настоящего изобретения является предложение системы адаптивного круиз-контроля (Adaptive Cruise Control, ACC), поддерживающей распознавание сигналов светофора, предназначенной для решения проблемы, заключающейся в том, что существующая система ACC не способна распознавать сигналы светофора.
Для достижения этой цели технические решения настоящего изобретения реализуются следующим образом:
- система адаптивного круиз-контроля, поддерживающая распознавание сигналов светофора, при этом система адаптивного круиз-контроля содержит:
- беспроводной модуль приема, применяемый с беспроводным модулем передачи светофора, и выполненный с возможностью приема первой информации о состоянии сигнала светофора, касающейся сигнала светофора на данной дорожной полосе, отправленной беспроводным модулем передачи; и главный контроллер, связанный с беспроводным модулем приема и выполненный с возможностью получения первой информации о состоянии сигнала светофора, принятой от беспроводного модуля приема, и выполнения управления остановкой или адаптивного круиз-контроля, исходя из первой информации о состоянии сигнала светофора.
Кроме того, система адаптивного круиз-контроля дополнительно содержит: камеру, связанную с главным контроллером и выполненную с возможностью получения второй информации о состоянии сигнала светофора, касающейся сигнала светофора на данной дорожной полосе, и отправки второй информации о состоянии сигнала светофора на главный контроллер; причем главный контроллер дополнительно выполнен с возможностью выполнения управления остановкой или адаптивного круиз-контроля, исходя из второй информации о состоянии сигнала светофора.
Кроме того, главный контроллер содержит модуль обработки сигналов светофора, модуль управления остановкой и модуль адаптивного круиз-контроля, причем модуль обработки сигналов светофора выполнен с возможностью определения необходимости активации модуля управления остановкой или модуля адаптивного круиз-контроля согласно первой информации о состоянии сигнала светофора или второй информации о состоянии сигнала светофора; модуль управления остановкой приспособлен для выполнения стратегии управления остановкой на транспортном средстве во время работы; и модуль адаптивного круиз-контроля приспособлен для выполнения стратегии адаптивного круиз-контроля на транспортном средстве во время работы.
Кроме того модуль обработки сигналов светофора содержит:
первый субмодуль обработки сигналов, выполненный с возможностью определения цвета сигнала светофора, горящего в данный момент, согласно первой информации о состоянии сигнала светофора, и определения необходимости активации модуля управления остановкой или модуля адаптивного круиз-контроля согласно различным цветам сигналов светофора, который предусматривает:
определение, когда горящий в данный момент сигнал светофора представляет собой зеленый свет, расчетного времени, в течение которого данное транспортное средство движется к целевой стоп-линии, и оставшегося времени, в течение которого активный в это время зеленый свет меняется на желтый свет, согласно первой информации о состоянии сигнала светофора, и активацию модуля управления остановкой при определении, что оставшееся время, в течение которого активный в это время зеленый свет меняется на желтый свет, короче, чем определенное расчетное время; в ином случае – активацию модуля адаптивного круиз-контроля;
определение, когда горящий в данный момент сигнал светофора представляет собой желтый свет, предупреждающего режима желтого света согласно первой информации о состоянии сигнала светофора, активацию модуля управления остановкой, если предупреждающий режим желтого света представляет собой кратковременный предупреждающий режим желтого света, или активацию модуля адаптивного круиз-контроля, если предупреждающий режим желтого света представляет собой долговременный предупреждающий режим желтого света; и
определение, когда горящий в данный момент сигнал светофора представляет собой красный свет, расчетного времени, в течение которого данное транспортное средство движется из своего текущего положения к целевой стоп-линии, и оставшегося времени, в течение которого активный в это время красный свет меняется на зеленый свет, согласно первой информации о состоянии сигнала светофора; активацию модуля управления остановкой, если оставшееся время, в течение которого активный в это время красный свет меняется на зеленый свет, дольше, чем определенное расчетное время; в ином случае – активацию модуля адаптивного круиз-контроля, если оставшееся время, в течение которого активный в это время красный свет меняется на зеленый свет, короче, чем определенное расчетное время или равно ему.
Кроме того, модуль обработки сигналов светофора содержит второй субмодуль обработки сигналов, выполненный с возможностью определения цвета сигнала светофора, горящего в данный момент, согласно второй информации о состоянии сигнала светофора, и определения необходимости активации модуля управления остановкой или модуля адаптивного круиз-контроля согласно сигналам светофора разных цветов, который предусматривает:
определение условия смены света согласно второй информации о состоянии сигнала светофора, когда сигнал светофора, горящий в данный момент, представляет собой зеленый свет, активацию модуля управления остановкой при определении, что зеленый свет меняется на желтый свет, или активацию модуля адаптивного круиз-контроля при определении, что зеленый свет горит непрерывно;
определение условия смены света согласно второй информации о состоянии сигнала светофора, когда сигнал светофора, горящий в данный момент, представляет собой желтый свет, активацию модуля управления остановкой при определении, что желтый свет меняется на красный свет, или активацию модуля адаптивного круиз-контроля при определении, что желтый свет активен непрерывно; и
определение, когда горящий в данный момент сигнал светофора представляет собой красный свет, типа сигнала светофора согласно второй информации о состоянии сигнала светофора и получение состояния лампы сигнала правого поворота транспортного средства и указания направления наземной направляющей стрелки; активацию, если сигнал светофора представляет собой цилиндрический сигнал светофора, модуля управления остановкой, если лампа сигнала правого поворота транспортного средства не включена, или активацию модуля адаптивного круиз-контроля, если лампа сигнала правого поворота транспортного средства включена; активацию, если сигнал светофора представляет собой сигнал светофора в форме стрелки, модуля управления остановкой, если наземная направляющая стрелка совпадает с указанием направления сигнала светофора в форме стрелки, или активацию модуля адаптивного круиз-контроля, если наземная направляющая стрелка не совпадает с указанием направления сигнала светофора в форме стрелки.
Кроме того, первая информация о состоянии сигнала светофора и вторая информация о состоянии сигнала светофора сконфигурированы с одинаковым содержимым или различным содержимым.
Кроме того, главный контроллер представляет собой главный блок управления радара миллиметрового диапазона системы адаптивного круиз-контроля.
Кроме того, система адаптивного круиз-контроля дополнительно содержит одно или несколько из группы, состоящей из: перцептивного компонента, выполненного с возможностью передачи информации о движении транспортного средства на главный контроллер; индикаторного прибора, выполненного с возможностью сообщения водителю о необходимости остановки, когда главный контроллер определяет необходимость активации модуля управления остановкой; и двигателя, выполненного с возможностью выполнения управления крутящим моментом, для остановки двигателя, когда главный контроллер определяет необходимость активации модуля управления остановкой; и блок управления ESP, выполненный с возможностью управления замедлением для остановки транспортного средства, когда главный контроллер определяет необходимость активации модуля управления остановкой.
В сравнении с уровнем техники система адаптивного круиз-контроля, поддерживающая распознавание сигналов светофора, имеет следующие преимущества: в настоящем изобретении дополнительно предоставлен беспроводной модуль приема, применяемый с беспроводным модулем передачи светофора, для получения информации о состоянии сигнала светофора, и дополнительно реализован адаптивный круиз-контроль, не нарушающий световых сигналов светофора, исходя из полученной информации о состоянии сигнала светофора, существующая система адаптивного круиз-контроля оптимизирована и улучшена, может быть ускорена разработка усовершенствованных вспомогательных систем вождения автономных транспортных средств в направлении практической реализации, увеличивается безопасность вождения для водителя, поведение при вождении водителя нормализуется, количество дорожных происшествий снижается, уровень травм персонала и потерь имущества из-за дорожных происшествий снижается, и обеспечивается техническая основа для последующих технологий автоматического вождения и «умных» перевозок более высокого уровня в пределах города.
Другой целью настоящего изобретения является предоставление способа адаптивного круиз-контроля, поддерживающего распознавание сигналов светофора и предназначенного для решения проблемы, заключенной в том, что существующая система АСС не способна распознавать сигналы светофора.
Для достижения этой цели техническое решение настоящего изобретения реализуется следующим образом:
способ адаптивного круиз-контроля, поддерживающий распознавание сигналов светофора, при этом данный способ включает: получение первой информации о состоянии сигнала светофора, касающейся сигнала светофора на данной дорожной полосе, принимаемой беспроводным модулем приема транспортного средства, причем беспроводной модуль приема применяют с беспроводным модулем передачи светофора и он выполнен с возможностью приема первой информации о состоянии сигнала светофора, отправленной с беспроводного модуля передачи; и выполнение управления остановкой или адаптивного круиз-контроля, исходя из первой информации о состоянии сигнала светофора.
Кроме того, упомянутое управление остановкой или адаптивный круиз-контроль, исходя из первой информации о состоянии сигнала светофора, включает: определение цвета сигнала светофора, горящего в данный момент; определение, когда горящий в данный момент сигнал светофора определен как зеленый свет, расчетного времени, в течение которого транспортное средство движется из своего текущего положения к целевой стоп-линии, и оставшегося времени, в течение которого зеленый свет меняется на желтый свет согласно первой информации о состоянии сигнала светофора, и выполнение стратегии управления остановкой при определении, что оставшееся время, в течение которого активный в это время зеленый свет меняется на желтый свет, короче, чем определенное расчетное время; в ином случае – выполнение стратегии адаптивного круиз-контроля; определение, когда горящий в данный момент сигнал светофора представляет собой желтый свет, предупреждающего режима желтого света согласно первой информации о состоянии сигнала светофора, активацию стратегии управления остановкой, если предупреждающий режим желтого света определен как кратковременный предупреждающий режим желтого света, или выполнение стратегии адаптивного круиз-контроля, если предупреждающий режим желтого света определен как долговременный предупреждающий режим желтого света; и определение, когда горящий в данный момент сигнал светофора представляет собой красный свет, расчетного времени, в течение которого данное транспортное средство движется из своего текущего положения к целевой стоп-линии, и оставшегося времени, в течение которого активный в это время красный свет меняется на зеленый свет, согласно первой информации о состоянии сигнала светофора; выполнение стратегии управления остановкой, если оставшееся время, в течение которого активный в это время красный свет меняется на зеленый свет, дольше, чем определенное расчетное время; в ином случае – выполнение стратегии адаптивного круиз-контроля, если оставшееся время, в течение которого активный в это время красный свет меняется на зеленый свет, короче, чем определенное расчетное время или рано ему.
Кроме того, способ адаптивного круиз-контроля дополнительно включает: получение второй информации о состоянии сигнала светофора, касающейся сигнала светофора на данной дорожной полосе, собранной камерой транспортного средства; и выполнение управления остановкой или адаптивного круиз-контроля, исходя из второй информации о состоянии сигнала светофора.
Кроме того, упомянутое выполнение управления остановкой или адаптивного круиз-контроля, исходя из второй информации о состоянии сигнала светофора, включает: определение цвета сигнала светофора, горящего в данный момент, согласно второй информации о состоянии сигнала светофора;
определение, когда горящий в данный момент сигнал светофора представляет собой зеленый свет, условия смены света согласно второй информации о состоянии сигнала светофора, выполнение стратегии управления остановкой, когда зеленый свет меняется на желтый свет, или выполнение стратегии адаптивного круиз-контроля, когда зеленый свет горит непрерывно;
определение, когда горящий в данный момент сигнал светофора представляет собой желтый свет, условия смены света согласно второй информации о состоянии сигнала светофора, выполнение стратегии управления остановкой при определении, что желтый свет меняется на красный свет, или выполнение стратегии адаптивного круиз-контроля при определении, что желтый свет горит непрерывно; и
определение типа сигнала светофора согласно второй информации о состоянии сигнала светофора, когда сигнал светофора, горящий в данный момент, представляет собой красный свет, и получение состояния лампы сигнала правого поворота транспортного средства и указания направления наземной направляющей стрелки; выполнение, если сигнал светофора представляет собой цилиндрический сигнал светофора, стратегии управления остановкой, если лампа сигнала правого поворота транспортного средства не включена или выполнение стратегии адаптивного круиз-контроля, если лампа сигнала правого поворота транспортного средства включена; выполнение, если сигнал светофора представляет собой сигнал светофора в форме стрелки, стратегии управления остановкой, если наземная направляющая стрелка совпадает с указанием направления сигнала светофора в форме стрелки, или выполнение стратегии адаптивного круиз-контроля, если наземная направляющая стрелка не совпадает с указанием направления сигнала светофора в форме стрелки.
Кроме того, первая информация о состоянии сигнала светофора и вторая информация о состоянии сигнала светофора сконфигурированы с одинаковым содержимым или различным содержимым.
Вышеупомянутые способ адаптивного круиз-контроля и система адаптивного круиз-контроля имеют те же преимущества в сравнении с уровнем техники, так что преимущества способа адаптивного круиз-контроля не будут повторно описаны в настоящем документе.
Другой целью настоящего изобретения является предложение машиночитаемого носителя информации, нацеленного на решение проблемы, заключающейся в том, что система адаптивного круиз-контроля не может распознавать сигналы светофоров.
Для достижения этой цели техническое решение настоящего изобретения реализуется следующим образом:
машиночитаемый носитель информации, на котором хранится компьютерная программа, которая при исполнении машиной заставляет процессор реализовывать вышеупомянутый способ адаптивного круиз-контроля.
Машиночитаемый носитель информации и система адаптивного круиз-контроля имеют те же преимущества в сравнении с уровнем техники, так что преимущества машиночитаемого носителя информации не будут повторно описаны в настоящем документе.
Другие признаки и преимущества, задействованные в настоящем изобретении, будут подробно описаны в нижеследующем подробном описании варианта осуществления.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Прилагаемые графические материалы, составляющие часть настоящего изобретения, используются для обеспечения дальнейшего понимания настоящего изобретения, схематические варианты осуществления и объяснения вариантов осуществления предназначены для объяснения настоящей заявки и не должны пониматься как ненадлежащее ограничение настоящей заявки. На фигурах:
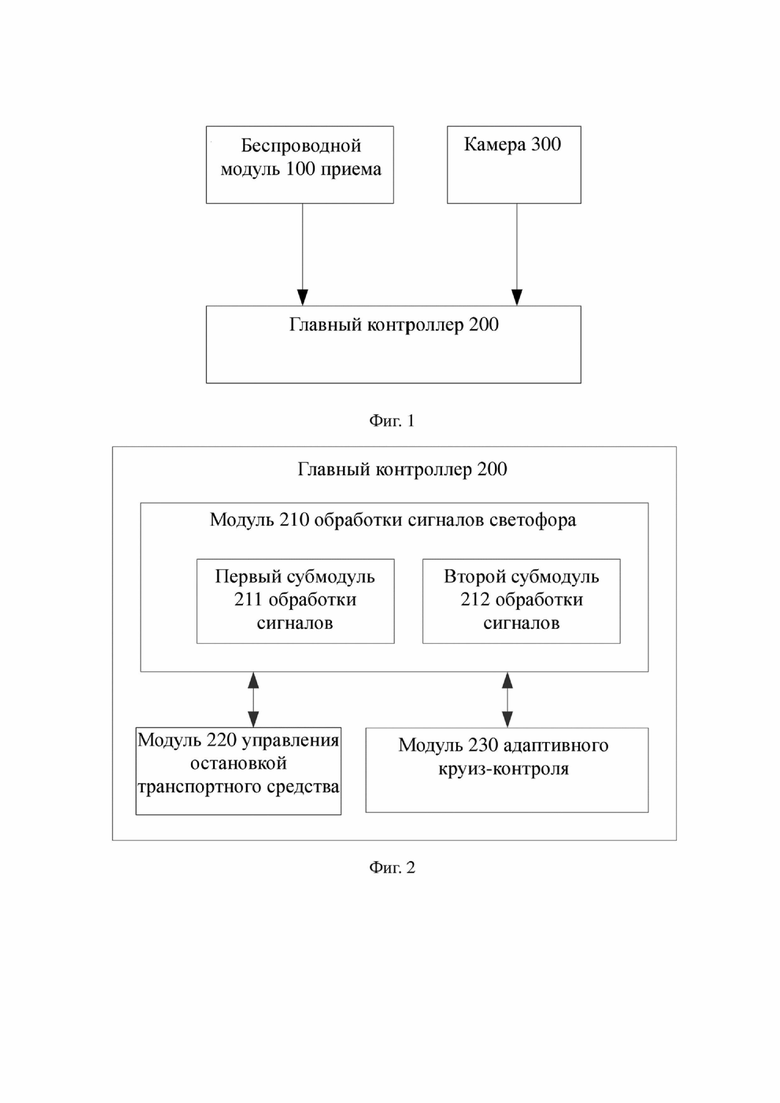
фиг. 1 – структурное схематическое изображение системы адаптивного круиз-контроля, поддерживающей распознавание сигналов светофора, согласно одному варианту осуществления настоящего изобретения;
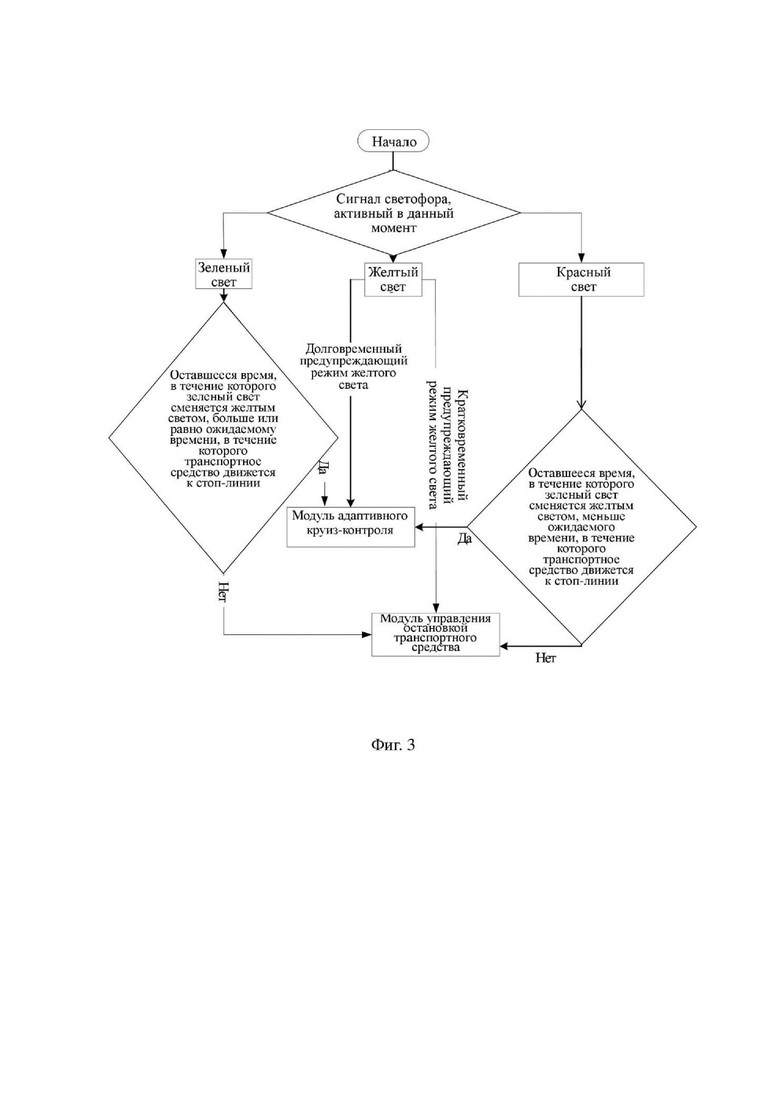
фиг. 2 – предпочтительное структурное схематическое изображение главного контроллера согласно одному варианту осуществления настоящего изобретения;
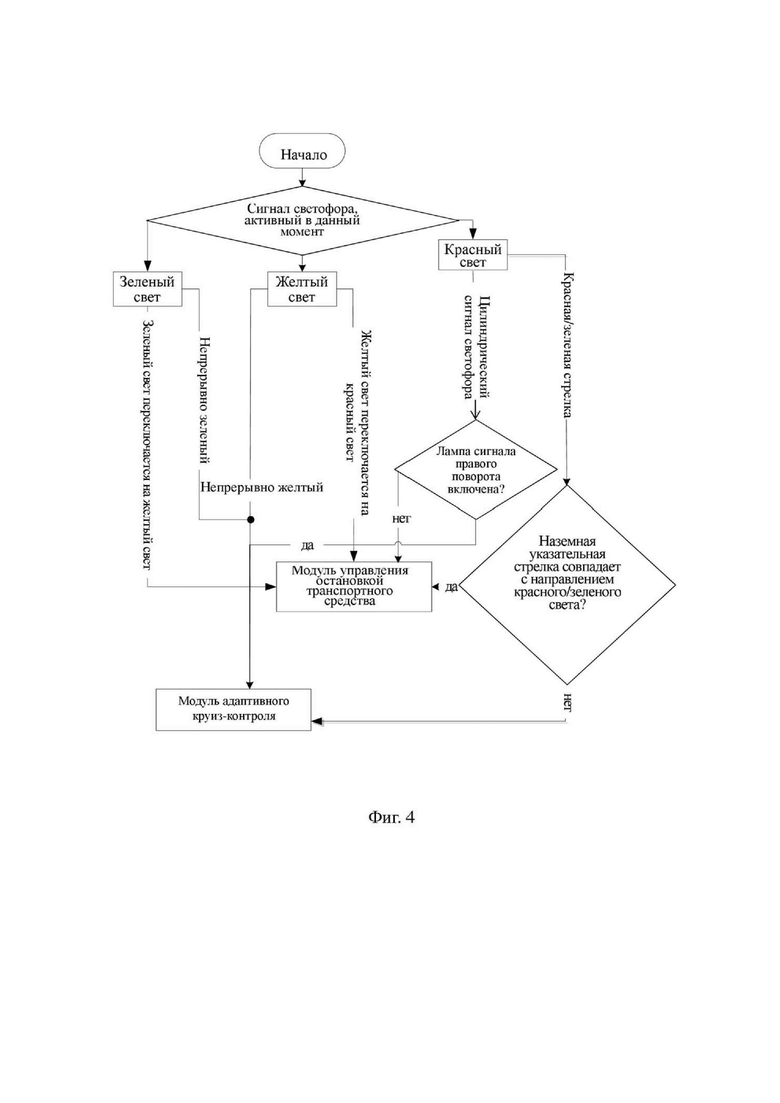
фиг. 3 – схематическая блок-схема примера управления транспортным средством на основании информации о состоянии первого сигнала светофора от беспроводного модуля приема согласно одному варианту осуществления настоящего изобретения;
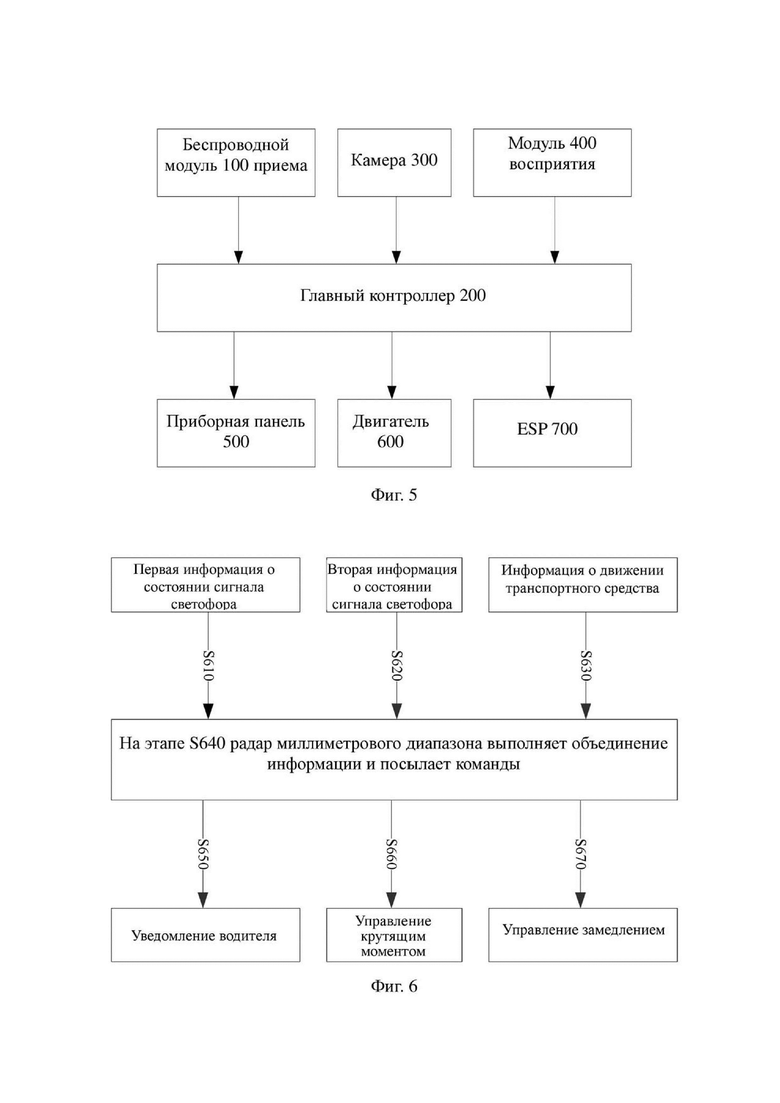
фиг. 4 – схематическая блок-схема примера управления транспортным средством на основании информации о состоянии второго сигнала светофора от камеры согласно одному варианту осуществления настоящего изобретения;
фиг. 5 – схематическая функциональная схема предпочтительной системы адаптивного круиз-контроля согласно одному варианту осуществления настоящего изобретения;
фиг. 6 – структурная схема передачи сигнала примера приложения предпочтительной системы адаптивного круиз-контроля согласно одному варианту осуществления настоящего изобретения; и
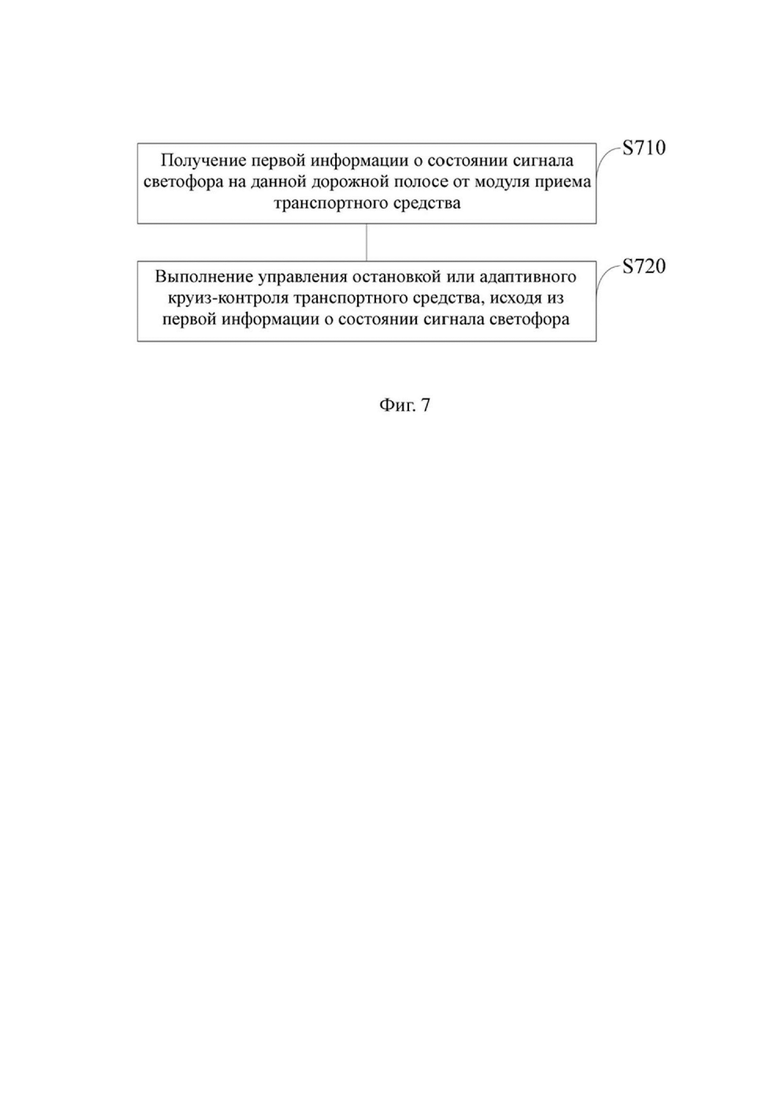
фиг. 7 – схематическая блок-схема способа адаптивного круиз-контроля, поддерживающего распознавание сигналов светофора, согласно другому варианту осуществления настоящего изобретения.
Ниже приведены ссылочные позиции:
100–беспроводной модуль приема; 200–главный контроллер; 300–камера; 400–компонент восприятия; 500–индикаторный прибор; 600–двигатель; 700–ESP;
210–модуль обработки сигналов светофора; 220–модуль управления остановкой транспортного средства; 230–модуль адаптивного круиз-контроля;
211–первый субмодуль обработки сигналов; 212–второй субмодуль обработки сигналов.
ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Следует отметить, что варианты осуществления в настоящем изобретении и признаки в вариантах осуществления могут быть свободно скомбинированы.
Кроме того, адаптивный круиз-контроль, упомянутый в вариантах осуществления настоящего изобретения, то есть ACC, относится к технологии, которая позволяет водителю автономно вести транспортное средство, сохраняя при этом безопасное расстояние до впереди идущего транспортного средства, ACC выявляет состояние впереди идущего транспортного средства с помощью радара миллиметрового диапазона, и обычно представляет в качестве трех ситуаций во время вождения транспортного средства, и эти три состояния следующие: ситуация 1) режим движения с заданной скоростью, когда на дорожной полосе нет другого впереди идущего транспортного средства, система АСС контролирует движение данного транспортного средства на предварительно заданной скорости; ситуация 2) режим следования, когда есть другие впереди идущие транспортные средства на данной дорожной полосе, если скорость движения впереди идущего транспортного средства меньше предварительно заданной скорости данного транспортного средства, система АСС осуществляет управление данным транспортным средством таким образом, чтобы сохранялось предварительно заданное безопасное расстояние от впереди идущего транспортного средства, и следует за впереди идущим транспортным средством на той же скорости, что и впереди идущее транспортное средство; ситуация 3) режим торможения, когда расстояние между данным транспортным средством и впереди идущим транспортным средством меньше предварительно заданного безопасного расстояния, система АСС определяет необходимость выполнения управления замедлением посредством тормозной системы или системы управления двигателем для обеспечения данного транспортного средства возможностью постоянно держаться на безопасном расстоянии от впереди идущего транспортного средства. Кроме того, сигналы светофора, упомянутые в вариантах осуществления настоящего изобретения, относятся к красному свету и зеленому свету, красный свет и зеленый свет могут быть использованы взаимозаменяемо.
Настоящее изобретение будет подробно описано ниже со ссылкой на прилагаемые графические материалы и в сочетании с вариантами осуществления.
На фиг. 1 представлено структурное схематическое изображение системы адаптивного круиз-контроля, поддерживающей распознавание сигналов светофора, согласно одному варианту осуществления настоящего изобретения. Как показано на фиг. 1, система адаптивного круиз-контроля может содержать: беспроводной модуль 100 приема, совместимый с беспроводным модулем передачи (не показан на фигурах) светофора и выполненный с возможностью приема первой информации о состоянии сигнала светофора, касающейся сигнала светофора на данной дорожной полосе и отправляемой беспроводным модулем передачи; и главный контроллер 200, связанный с беспроводным модулем 100 приема и выполненный с возможностью получения первой информации о состоянии сигнала светофора, принимаемой беспроводным модулем приема, и выполнения управления остановкой или адаптивного круиз-контроля, исходя из первой информации о состоянии сигнала светофора.
Светофор должен быть сконфигурирован с приемопередатчиком для обеспечения беспроводной связи, то есть светофор должен иметь беспроводной модуль передачи, и беспроводной модуль передачи светофора может иметь связь с контроллером светофора, и контроллер светофора выполнен с возможностью обнаружения и получения первой информации о состоянии сигнала светофора в реальном времени, и отправки первой информации о состоянии сигнала светофора по беспроводному модулю передачи. Беспроводной модуль 100 приема транспортного средства совместим с беспроводным модулем передачи светофора, и может принимать первую информацию о состоянии сигнала светофора, отправляемую беспроводным модулем передачи в пределах заданного диапазона расстояний. При этом первая информация о состоянии сигнала светофора может включать цвет сигнала светофора, состояние освещения сигнала светофора, a оставшееся время смены сигнала светофора, предупреждающий режим желтого света (например, кратковременное предупреждение желтым светом или долговременное предупреждение желтым светом) и т. п. Кроме того, контроллер светофора может также использовать устройство мониторинга, установленное совместно со светофором, для получения информации, такой как расстояние от положения данного транспортного средства до целевой стоп-линии, и включать вместе эту информацию в первую информацию о состоянии сигнала светофора.
В предпочтительном варианте осуществления система адаптивного круиз-контроля может дополнительно содержать: камеру 300, связанную с главным контроллером 200 и выполненную с возможностью получения второй информации о состоянии сигнала светофора, касающейся сигнала светофора на данной дорожной полосе, и отправки второй информации о состоянии сигнала светофора на главный контроллер 200. При этом главный контроллер 200 дополнительно выполнен с возможностью выполнения управления остановкой или адаптивного круиз-контроля транспортного средства, исходя из второй информации о состоянии сигнала светофора.
Следует отметить, что первая информация о состоянии сигнала светофора и вторая информация о состоянии сигнала светофора являются одним типом информации о состоянии сигнала светофора, в настоящем документе «первый» и «второй» указывают, что информация о состоянии сигнала светофора имеет два различных источника, то есть информация о состоянии сигнала светофора получена от беспроводного модуля 100 приема и камеры 300 соответственно. Однако при получении второй информации о состоянии сигнала светофора камерой 300 путем выполнения обработки изображений содержимое второй информации о состоянии сигнала светофора, полученной камерой 300, может отличаться от первой информации о состоянии сигнала светофора, поскольку камеры имеют различные характеристики в отношении изображений. Например, большинство камер не могут точно распознавать оставшееся время смены сигнала светофора, то есть вторая информация о состоянии сигнала светофора может не включать оставшееся время смены сигнала светофора. Однако в целом вторая информация о состоянии сигнала светофора может включать цвет сигнала светофора, состояние освещения сигнала светофора, тип сигнала светофора (например, цилиндрический сигнал светофора или сигнал светофора в виде стрелки), предупреждающий режим желтого света (кратковременный предупреждающий режим желтого света или долговременный предупреждающий режим желтого света), условие смены света (например, смену зеленого света на желтый свет или непрерывно активный зеленый свет) и т. п. Кроме того, камера 300 может быть дополнительно выполнена с возможностью распознания идентификатора наземного движения (например, наземной направляющей стрелки), таки образом в некоторых вариантах осуществления вторая информация о состоянии сигнала светофора может дополнительно включать информацию об идентификаторе наземного движения. Соответственно, следует отметить, что содержимое первой информации о состоянии сигнала светофора и второй информации о состоянии сигнала светофора могут отличаться в соответствии с конкретной стратегией управления, и содержимое первой информации о состоянии сигнала светофора и второй информации о состоянии сигнала светофора будет описано ниже со ссылкой на примеры, при этом подробности не будут повторно описаны в настоящем документе.
На фиг. 2 показано предпочтительное структурное схематическое изображение главного контроллера 200 согласно одному варианту осуществления настоящего изобретения; Как показано на фиг. 2, главный контроллер 200 может содержать модуль 210 обработки сигналов светофора, модуль 220 управления остановкой, и модуль 230 адаптивного круиз-контроля. При этом модуль 210 обработки сигналов светофора выполнен с возможностью определения необходимости активации модуля 220 управления остановкой или модуля 230 адаптивного круиз-контроля согласно первой информации о состоянии сигнала светофора или второй информации о состоянии сигнала светофора; модуль 220 управления остановкой приспособлен для выполнения стратегии управления остановкой на транспортном средстве при его активации; и модуль 230 адаптивного круиз-контроля приспособлен для выполнения стратегии адаптивного круиз-контроля на транспортном средстве при его активации.
При этом упомянутое выполнение модулем 220 управления остановкой стратегии управления остановкой на транспортном средстве, когда модуль 220 управления остановкой активирован, может включать: определение целевой стоп-линии; и автоматическое определение момента времени начала торможения транспортного средства, исходя из определенной целевой стоп-линии; отправку запроса на замедление на блок управления программой устойчивости транспортного средства (Vehicle Stability Program, ESP) транспортного средства, когда модуль 220 управления остановкой начинает торможение транспортного средства. После торможения и остановки транспортного средства с помощью ESP, модуль 210 обработки сигналов светофора продолжает выполнение. При этом целевая стоп-линия может включать два типа стоп-линий, а именно обычную стоп-линию (т. е. стоп-линию, предусмотренную правилами дорожного движения) и пешеходный переход с разметкой, при наличии транспортного средства перед обычной стоп-линией или пешеходным переходом с разметкой это транспортное средство принимается за целевую стоп-линию; при отсутствии какого-либо транспортного средства перед обычной стоп-линией или пешеходным переходом с разметкой, в качестве целевой линии принимается одна линия (т. е. предварительно заданное значение, например 2 метра), находящаяся перед обычной стоп-линией или пешеходным переходом с разметкой и имеющая расстояние в Х метров от обычной стоп-линии или пешеходного перехода с разметкой; в процессе определения обычная стоп-линия имеет приоритет перед пешеходным переходом с разметкой.
При этом, при активации модуля 230 адаптивного круиз-контроля стратегия адаптивного круиз-контроля транспортного средства, выполняемая модулем 230 адаптивного круиз-контроля, может включать режим движения с заданной скоростью, режим следования и режим торможения, эти режимы включают конкретно следующее: 1) управление данным транспортным средством для движения с предварительно заданной скоростью при отсутствии впереди идущего транспортного средства на данной дорожной полосе; 2) если скорость движения впереди идущего транспортного средства меньше, чем предварительно заданная скорость данного транспортного средства на данной дорожной полосе, контроль наличия впереди идущего транспортного средства на данной дорожной полосе, обеспечение соблюдения данным транспортным средством предварительно заданного безопасного расстояния до впереди идущего транспортного средства и обеспечение движения данного транспортного средства на скорости, равной скорости впереди идущего транспортного средства; 3) когда расстояние между данным транспортным средством и впереди идущим транспортным средством короче, чем предварительно заданное безопасное расстояние, выполнение управления замедлением посредством ESP или двигателя с тем, чтобы постоянно сохранять безопасное расстояние до впереди идущего транспортного средства.
Кроме того, стратегии управления, соответствующие модулю 220 управления остановкой и модулю 230 адаптивного круиз-контроля, могут дополнительно включать возможность передачи управления водителю с целью ручного вмешательства в вождение транспортного средства.
Кроме того, в соответствии с различными источниками первой информации о состоянии сигнала светофора и второй информации о состоянии сигнала светофора модуль 210 обработки сигналов светофора может быть выполнен с возможностью содержания первого субмодуля 211 обработки сигналов и второго субмодуля 212 обработки сигналов, так чтобы первый субмодуль 211 обработки сигналов и второй субмодуль 212 обработки сигналов выбирали модуль 220 управления остановкой и модуль 230 адаптивного круиз-контроля для выполнения соответствующей стратегии управления остановкой транспортного средства и соответствующей стратегии адаптивного круиз-контроля соответственно.
В частности, относительно первого субмодуля 211 обработки сигналов, первый субмодуль 211 обработки сигналов выполнен с возможностью определения цвета сигнала светофора, горящего в данный момент, согласно первой информации о состоянии сигнала светофора, и определения необходимости активации модуля 220 управления остановкой или модуля 230 адаптивного круиз-контроля согласно разным цветам сигналов светофора, определение активации модуля 220 управления остановкой или модуля 230 адаптивного круиз-контроля включает: определение, когда горящий в данный момент сигнал светофора представляет собой зеленый свет, расчетного времени, в течение которого данное транспортное средство движется из своего текущего положения к целевой стоп-линии, и оставшегося времени, в течение которого активный в это время зеленый свет меняется на желтый свет, согласно первой информации о состоянии сигнала светофора, активацию модуля 220 управления остановкой при определении, что оставшееся время, в течение которого зеленый свет меняется на желтый свет, короче, чем определенное расчетное время; в ином случае – активацию модуля 230 адаптивного круиз-контроля, если оно дольше; определение, когда горящий в данный момент сигнал светофора представляет собой желтый свет, предупреждающего режима желтого света согласно первой информации о состоянии сигнала светофора, активацию модуля 220 управления остановкой, если предупреждающий режим желтого света представляет собой кратковременный предупреждающий режим желтого света, и активацию модуля 230 адаптивного круиз-контроля, если предупреждающий режим желтого света представляет собой долговременный предупреждающий режим желтого света; и определение, когда горящий в данный момент сигнал светофора представляет собой красный свет, расчетного времени, в течение которого данное транспортное средство движется из своего текущего положения к целевой стоп-линии, и оставшегося времени, в течение которого активный в это время красный свет меняется на зеленый свет, согласно первой информации о состоянии сигнала светофора, и активацию модуля 220 управления остановкой, если оставшееся время, в течение которого активный в это время красный свет меняется на зеленый свет, дольше, чем определенное расчетное время, в течение которого данное транспортное средство движется из своего текущего положения к целевой стоп-линии; в ином случае – активацию модуля 230 адаптивного круиз-контроля, если оно меньше расчетного времени, в течение которого данное транспортное средство движется из своего текущего положения к целевой стоп-линии или равно ему.
Например, на фиг. 3 представлена схематическая блок-схема примера выполнения управления транспортным средством, исходя из первой информации о состоянии сигнала светофора, полученной от беспроводного модуля приема, в одном варианте осуществления настоящего изобретения. Как показано на фиг. 3, в этом примере первый субмодуль 211 обработки сигналов выполнен с возможностью классификации и обработки цвета сигналов светофора, горящих на данной дорожной полосе, в соответствии с указанием первой информации о состоянии сигнала светофора, принимаемой беспроводным модулем 100 приема, если дорожная полоса, по которой едет транспортное средство, представляет собой дорожную полосу с поворотом налево/прямую дорожную полосу, дорожную полосу с поворотом налево/прямую дорожную полосу/крайнюю правую дорожную полосу, прямую дорожную полосу/крайнюю правую дорожную полосу, первый субмодуль 211 обработки сигналов выполнен с возможностью определения намерений водителя в соответствии с информацией, такой как лампы сигналов поворота данного транспортного средства, и выполнения логического суждения в соответствии с состоянием сигнала светофора, соответствующим намерениям водителя:
1) в данный момент горит зеленый свет, первый субмодуль 211 обработки сигналов получает расчетное время, в течение которого данное транспортное средство движется из своего текущего положения к целевой стоп-линии, путем деления расстояния между положением данного транспортного средства и целевой стоп-линией на среднюю скорость данного транспортного средства, если оставшееся время, в течение которого зеленый свет сменяется на желтый свет, короче, чем расчетное время, в течение которого данное транспортное средство движется из своего текущего положения к целевой стоп-линии, система АСС получает доступ к модулю 220 управления остановкой, если оно больше, чем расчетное время, в течение которого данное транспортное средство движется из своего текущего положения к целевой стоп-линии; в ином случае система АСС получает доступ к модулю 230 адаптивного круиз-контроля.
2) в данный момент горит желтый свет, первый субмодуль 211 обработки сигналов определяет классификацию предупреждающего режима желтого света как долговременный предупреждающий режим желтого света или кратковременный предупреждающий режим желтого света, при определении кратковременного предупреждающего режима желтого света система АСС получает доступ к модулю 220 управления остановкой; в ином случае происходит активация модуля 230 адаптивного круиз-контроля.
3) в данный момент горит красный свет, первый субмодуль 211 обработки сигналов получает расчетное время, в течение которого данное транспортное средство движется из своего текущего положения к целевой стоп-линии, путем деления расстояния между положением данного транспортного средства и целевой стоп-линией на среднюю скорость данного транспортного средства, если оставшееся время, в течение которого красный свет сменяется на зеленый свет, больше, чем расчетное время, в течение которого данное транспортное средство движется из своего текущего положения к целевой стоп-линии, система АСС получает доступ к модулю 220 управления остановкой, если оно меньше, чем расчетное время, в течение которого данное транспортное средство движется из своего текущего положения к целевой стоп-линии или равно ему; в ином случае активируется модуль 230 адаптивного круиз-контроля.
Кроме того, относительно второго субмодуля 212 обработки сигналов, второй субмодуль 212 обработки сигналов выполнен с возможностью определения цвета сигнала светофора, горящего в данный момент, согласно второй информации о состоянии сигнала светофора, и определения необходимости активации модуля 220 управления остановкой или модуля 230 адаптивного круиз-контроля согласно разным цветам сигналов светофора, при этом управление остановкой включает: определение, когда горящий в данный момент сигнал светофора представляет собой зеленый свет, условия смены света согласно второй информации о состоянии сигнала светофора, активацию модуля 220 управления остановкой при определении, что зеленый свет меняется на желтый свет, или активацию модуля 230 адаптивного круиз-контроля, когда зеленый свет горит непрерывно; определение, когда желтый свет горит непрерывно, условия смены света согласно второй информации о состоянии сигнала светофора, и активацию модуля 220 управления остановкой при определении, что желтый свет меняется на красный свет; и определение, когда горящий в данный момент сигнал светофора представляет собой красный свет, типа сигнала светофора согласно второй информации о состоянии сигнала светофора, и получение состояния лампы сигнала правого поворота транспортного средства и указания направления наземной направляющей стрелки; когда сигнал светофора представляет собой цилиндрический сигнал светофора, активацию модуля 220 управления остановкой, если лампа сигнала правого поворота транспортного средства не включена; в ином случае – активацию модуля 230 адаптивного круиз-контроля; когда сигнал светофора представляет собой сигнал светофора в форме стрелки, активацию модуля 230 управления остановкой; в ином случае – активацию модуля адаптивного круиз-контроля. При этом главный контроллер 200 может получать состояние лампы сигнала правого поворота транспортного средства в реальном времени по шине CAN транспортного средства, и камера 300 может получать указание направления наземной направляющей стрелки посредством съемки изображений и распознания изображений, более того, камера 300 может включать информацию об указании направления наземной направляющей стрелки во вторую информацию о состоянии сигнала светофора.
Например, на фиг. 4 представлена схематическая блок-схема примера выполнения управления транспортным средством, исходя из второй информации о состоянии сигнала светофора, полученной от беспроводного модуля приема, в одном варианте осуществления настоящего изобретения. В этом примере из-за ограничений способности распознавать изображения камеры 200 вторая информация о состоянии сигнала светофора может не включать оставшееся время смены сигнала светофора. Как показано на фиг. 4, в этом примере второй субмодуль 212 обработки сигналов выполняет классификацию и обработку в отношении состояния сигнала светофора на данной дорожной полосе, обозначенного второй информацией о состоянии сигнала светофора, принятой камерой 300, если дорожная полоса, по которой движется транспортное средство, представляет собой полосу с поворотом налево/прямую дорожную полосу, дорожную полосу с поворотом налево/направо/прямую дорожную полосу и прямую дорожную полосу/дорожную полосу с поворотом направо, второй субмодуль 212 обработки сигналов определяет намерение водителя в соответствии с информацией, такой как лампа сигнала поворота данного транспортного средства, и выполняет логическое суждение в соответствии с состоянием сигнала светофора, соответствующим намерениям водителя.
1) Сигнал светофора, горящий в данный момент, представляет собой зеленый свет, когда второй субмодуль 212 обработки сигналов определяет, что зеленый свет меняется на желтый свет согласно второй информации о состоянии сигнала светофора, система ACC активирует модуль 220 управления остановкой; когда второй субмодуль 212 обработки сигналов определяет, что зеленый свет горит непрерывно, активируется модуль 230 адаптивного круиз-контроля.
2) Сигнал светофора, горящий в данный момент, представляет собой желтый свет, когда второй субмодуль 212 обработки сигналов определяет, что желтый свет меняется на красный свет согласно второй информации о состоянии сигнала светофора, система ACC активирует модуль 220 управления остановкой; когда второй субмодуль 212 обработки сигналов определяет, что желтый свет горит непрерывно, активируется модуль 230 адаптивного круиз-контроля.
3) Сигнал светофора, горящий в данный момент, представляет собой красный свет, при этом второй субмодуль 212 обработки сигналов определяет тип сигнала светофора согласно второму состоянию сигнала светофора, и использует различные стратегии управления в соответствии с различными типами сигналов светофора, если водитель не включает лампу сигнала правого поворота, система АСС активирует модуль 220 управления остановкой, в ином случае активируется модуль 230 адаптивного круиз-контроля; если наземная направляющая стрелка и указание направления светофора совпадают, система АСС активирует модуль 220 управления остановкой; в ином случае активируется модуль 230 адаптивного круиз-контроля. В этом условии предусмотрены разные типы сигналов светофора, тип сигнала светофора, соответствующий данной дорожной полосе, может быть интеллектуально распознан, и происходит применение специальной стратегии управления в отношении цилиндрического сигнала светофора, и водителю обеспечивается гарантия безопасного вождения при обеспечении безопасности, при этом правый поворот более предпочтителен с точки зрения безопасности.
Из примеров на фиг. 3 и фиг. 4 можно увидеть, что рассмотрены разные типы сигналов светофора и дорожных условий на сложных перекрестках в вариантах осуществления настоящего изобретения, при этом транспортному средству обеспечена возможность движения по дороге в соответствии со знаками дорожной разметки и сменой сигналов светофора и т. п. Если транспортному средству не разрешено движение по дороге, может быть задействован тормоз транспортного средства для остановки на целевой стоп-линии или водитель может быть оповещен о передаче управления транспортным средством, так чтобы поведение на дороге, нарушающее сигнал светофора, было предотвращено, уменьшилось количество происшествий на дороге и обеспечивалась безопасность вождения.
Согласно примерам, соответствующим фиг. 3 и фиг. 4, в дополнение к получению информации о состоянии сигнала светофора главный контроллер 200 также должен получать такую информацию, как текущая средняя скорость транспортного средства, сигнал поворота и подобное в некоторых сценариях, и эта информация может быть собрана соответствующими компонентами восприятия и передана на главный контроллер 200 посредством шины CAN. Исходя из этого, на фиг. 5 представлено структурное схематическое изображение предпочтительной системы адаптивного круиз-контроля согласно одному варианту осуществления настоящего изобретения. Рассмотрим фиг. 5, где в одном предпочтительном варианте осуществления система адаптивного круиз-контроля может дополнительно содержать компонент 400 восприятия, при этом компонент восприятия содержит, например, измерительный прибор, такой как измеритель числа оборотов, лампа сигналов поворота, датчик скорости колеса, датчик угла поворота рулевого колеса, датчик угла наклона в поперечном направлении и т. п., и компонент восприятия выполнен с возможностью передачи связанной информации о перемещении транспортного средства на главный контроллер 200 для определения главным контроллером 200 средней скорости транспортного средства, направления транспортного средства и т. п.
Кроме того, с целью взаимодействия с функционированием модуля 220 управления остановкой и модуля 230 адаптивного круиз-контроля предпочтительная система адаптивного круиз-контроля может дополнительно включать индикаторный прибор 500, двигатель 600 и электронную программу 700 стабилизации (Electronic Stability Program, ESP), где, например, индикаторный прибор 500 выполнен с возможностью сообщения водителю о необходимости остановки. когда главный контроллер 200 определяет необходимость активации модуля 220 управления остановкой; например когда главный контроллер 200 определяет необходимость активации модуля 220 управления остановкой, двигатель 600 и ESP 700 приспособлены для выполнения управления крутящим моментом и управления замедлением для остановки транспортного средства.
Кроме того, главный контроллер 200 может быть непосредственно выполнен как главный блок управления радара миллиметрового диапазона системы адаптивного круиз-контроля. Известно, что все существующие в настоящее время системы адаптивного круиз-контроля оснащены радарами миллиметрового диапазона, и каждый радар миллиметрового диапазона имеет главный блок управления, и главный блок управления в основном используется для реализации управления ускорением транспортного средства и замедлением транспортного средства и подобным в процессе адаптивного круиз-контроля, и имеет весьма широкие возможности обработки данных. Как следствие, в сравнении с дополнительным конфигурированием одного главного контроллера 200, главный блок управления радара миллиметрового диапазона непосредственно используется как главный контроллер 200, что способствует снижению стоимости компонентов, и он должен выполнять меньшее количество программных конфигураций в отношении главного блока управления радара миллиметрового диапазона, который был приспособлен к адаптивному круиз-контролю транспортного средства, подлежащего реализации.
На основании фиг. 5, фиг. 6 представлена структурная схема передачи сигнала примера приложения предпочтительной системы адаптивного круиз-контроля согласно одному варианту осуществления настоящего изобретения, в этом примере приложения главный контроллер 200 сконфигурирован как главный блок управления радара миллиметрового диапазона, как следствие, главный контроллер 200 непосредственно называется радаром миллиметрового диапазона. Как показано на фиг. 6, соответствующий процесс передачи сигнала в основном включает следующие части:
на этапе S610 беспроводной модуль 100 приема принимает первую информацию о состоянии сигнала светофора, указывающую на состояние сигнала светофора (состояние освещения и цвет сигнала светофора) текущей дорожной полосы, оставшееся время переключения с красного света на зеленый свет, и расстояние от положения данного транспортного средства до целевой стоп-линии, которая подается обратно беспроводным модулем передачи светофора;
на этапе S620 камера 300, установленная на зеркале заднего вида в верхней части переднего ветрового стекла транспортного средства использует технологию обработки изображений для идентификации наземных направляющих стрелок спереди, наземных стоп-линий, пешеходных переходов с разметкой, сигналов светофоров, разделительных линий дорожных полос, целевых объектов и т. п. для получения второй информации о состоянии сигнала светофора, и подачи второй информации о состоянии сигнала светофора на радар миллиметрового диапазона посредством шины CAN транспортного средства.
На этапе S630 компонент 400 восприятия транспортного средства подает информацию о перемещении транспортного средства, такую как скорость транспортного средства (например, фактическую скорость транспортного средства, скорость транспортного средства, отображаемую на приборной панели), угол поворота рулевого колеса, угловую скорость угла поворота рулевого колеса, возрастающую скорость в боковом направлении, возрастающую скорость в продольном направлении, сигнал поворота, сигнал педали тормоза, сигнал педали газа, на вход радара миллиметрового диапазона по шине CAN транспортного средства;
на этапе S640 радар миллиметрового диапазона принимает информацию, предоставляемую камерой 300 и различными компонентами 400 восприятия, и выполняет комплексную обработку данной информации, и посылает соответствующую команду на замедление на ESP 700, посылает на двигатель 600 команду управления крутящим моментом, и посылает связанную предупреждающую информацию для отображения и команду на индикаторный прибор 500.
На этапе S650 индикаторный прибор 500 выдает сообщения водителю в ответ на команду радара миллиметрового диапазона.
На этапе S660 двигатель 600 выполняет управление крутящим моментом в ответ на команду радара миллиметрового диапазона.
На этапе S670 ESP 700 выполняет управление замедлением в ответ на команду радара миллиметрового диапазона.
Следует отметить, что традиционная система АСС оснащена радаром миллиметрового диапазона, камерой 300, компонентом 400 восприятия, индикаторным прибором 500, двигателем 600 и ESP 700. Следует понимать, что эти компоненты могут быть разделены с другими функциональными системами транспортного средства. Как следствие, согласно примеру этого приложения, можно видеть, что технические решения варианта осуществления настоящего изобретения могут быть реализованы благодаря лишь дополнительному конфигурированию одного беспроводного модуля 100 приема, совместимого с беспроводным модулем передачи светофора, то есть применена архитектура «один радар миллиметрового диапазона плюс один беспроводной модуль приема» для реализации адаптивного круиз-контроля ламп дорожных сигналов. Дополнительно эта архитектура может, кроме прочего, предусматривать камеру, поскольку камера тоже обладает функцией распознавания сигналов светофора, то есть данный вариант осуществления настоящего изобретения также применим к светофорам без приемопередатчика беспроводной связи.
Соответственно, система адаптивного круиз-контроля в данном варианте осуществления настоящего изобретения оптимизирована и улучшена в сравнении с существующей системой АСС, система адаптивного круиз-контроля может обеспечивать усовершенствованную вспомогательную систему вождения автономного транспортного средства для практического развития, улучшает безопасность вождения для водителя, приводит к единообразию поведения водителя при вождении, снижает количество дорожных происшествий, уменьшает уровень травм персонала и потери имущества из-за транспортных происшествий, и обеспечивает техническую основу для последующих технологий автоматического вождения и «умных» перевозок более высокого уровня в пределах города.
Также следует отметить, что главный контроллер 200 может содержать процессор и запоминающее устройство, модуль обработки сигналов светофора, модуль управления остановкой, модуль адаптивного круиз-контроля и субмодули модуля адаптивного круиз-контроля могут храниться в запоминающем устройстве в виде программных блоков, и процессор исполняет эти программные блоки, хранимые в запоминающем устройстве, для реализации соответствующих функций. Процессор содержит ядро, и ядро приспособлено для вызова соответствующего программного блока в памяти. Могут существовать одно или несколько ядер, a способ передачи данных выполняют путем настройки параметров ядер. Запоминающее устройство может предусматривать постоянное запоминающее устройство, оперативное запоминающее устройство (Random Access Memory, RAM), и/или энергонезависимое запоминающее устройство в машиночитаемом носителе, и энергонезависимое запоминающее устройство может представлять собой запоминающее устройство, доступное только для считывания (Read Only Memory, ROM) или флеш-RAM, и запоминающее устройство содержит по меньшей мере одну микросхему запоминающего устройства.
На фиг. 7 представлена схематическая блок-схема способа адаптивного круиз-контроля, поддерживающего распознавание сигналов светофора, согласно еще одному варианту осуществления настоящего изобретения, при этом способ адаптивного круиз-контроля основан на том же изобретательском замысле, что и система адаптивного круиз-контроля в вышеупомянутых вариантах осуществления. Как показано на фиг. 7, этот способ адаптивного круиз-контроля может включать следующие этапы:
на этапе S710 – получение первой информации о состоянии сигнала светофора, касающейся сигнала светофора на данной дорожной полосе, принятой беспроводным модулем приема транспортного средства.
Беспроводной модуль приема совместим с беспроводным модулем передачи светофора и выполнен с возможностью приема первой информации о состоянии сигнала светофора, отправленной беспроводным модулем передачи, относительно конкретных подробностей информационного взаимодействия между беспроводным модулем приема и сигналом светофора может быть сделана ссылка на вышеупомянутые варианты осуществления касательно системы адаптивного круиз-контроля, и подробности не будут описаны повторно в настоящем документе.
На этапе S720 выполняют управление остановкой или адаптивный круиз-контроль транспортного средства, исходя из первой информации о состоянии сигнала светофора.
В одном предпочтительном варианте осуществления этап S720 может дополнительно включать:
этап S721: определение цвета сигнала светофора, горящего в данный момент, согласно первой информации о состоянии сигнала светофора.
этап S722: определение, когда горящий в данный момент сигнал светофора представляет собой зеленый свет, расчетного времени, в течение которого данное транспортное средство движется к целевой стоп-линии, и оставшегося времени, в течение которого активный в это время зеленый свет меняется на желтый свет, согласно первой информации о состоянии сигнала светофора, выполнение стратегии управления остановкой при определении, что оставшееся время, в течение которого активный в это время зеленый свет меняется на желтый свет, короче, чем определенное расчетное время, в течение которого данное транспортное средство движется из своего текущего положения к целевой стоп-линии; в ином случае – выполнение стратегии адаптивного круиз-контроля, если оно дольше, чем расчетное время, в течение которого данное транспортное средство движется из своего текущего положения к целевой стоп-линии;
этап S723: определение, когда горящий в данный момент сигнал светофора представляет собой желтый свет, предупреждающего режима желтого света согласно первой информации о состоянии сигнала светофора, и выполнение стратегии управления остановкой, если предупреждающий режим желтого света определен как кратковременный предупреждающий режим желтого света; или выполнение стратегии адаптивного круиз-контроля, если предупреждающий режим желтого света представляет собой долговременный предупреждающий режим желтого света;
этап S724: определение, когда горящий в данный момент сигнал светофора представляет собой красный свет, расчетного времени, в течение которого данное транспортное средство движется из своего текущего положения к целевой стоп-линии, и оставшегося времени, в течение которого активный в это время красный свет меняется на зеленый свет, согласно первой информации о состоянии сигнала светофора, и выполнение стратегии управления остановкой при определении, что оставшееся время, в течение которого активный в это время красный свет меняется на зеленый свет дольше, чем определенное расчетное время; в ином случае – активацию стратегии адаптивного круиз-контроля.
В дополнение к способу получения информации о состоянии сигнала светофора с помощью беспроводного модуля приема на этапе S710 и этапе S720, в одном предпочтительном варианте осуществления способ адаптивного круиз-контроля может дополнительно включать следующие этапы (не показаны на фиг. 7):
этап S730: получение второй информации о состоянии сигнала светофора, касающейся сигналов светофора на данной дорожной полосе, собранной камерой транспортного средства;
этап S740: выполнение управления остановкой или адаптивного круиз-контроля, исходя из второй информации о состоянии сигнала светофора.
В одном предпочтительном варианте осуществления этап S740 может дополнительно включать следующие этапы:
этап 741: определение цвета сигнала светофора, горящего в данный момент, согласно второй информации о состоянии сигнала светофора;
этап S742: определение, когда горящий в данный момент сигнал светофора представляет собой зеленый свет, условия смены света согласно второй информации о состоянии сигнала светофора, и выполнение стратегии управления остановкой при определении, что зеленый свет меняется на желтый свет, и выполнение стратегии адаптивного круиз-контроля, когда зеленый свет горит непрерывно;
этап S743: определение, когда горящий в данный момент сигнал светофора представляет собой желтый свет, условия смены света согласно второй информации о состоянии сигнала светофора, и выполнение стратегии управления остановкой, при определении, что желтый свет меняется на красный свет, и выполнение стратегии адаптивного круиз-контроля, когда желтый свет горит непрерывно.
этап S744, определение типа сигнала светофора согласно второй информации о состоянии сигнала светофора, когда сигнал светофора, горящий в данный момент, представляет собой красный свет, и получение состояния лампы сигнала правого поворота транспортного средства и указания направления наземной направляющей стрелки; когда сигнал светофора представляет собой цилиндрический сигнал светофора, выполнение стратегии управления остановкой, если лампа сигнала правого поворота транспортного средства не включена; в ином случае – выполнение стратегии адаптивного круиз-контроля; когда сигнал светофора представляет собой сигнал светофора в форме стрелки, выполнение стратегии управления остановкой, если направление наземной направляющей стрелки совпадает с указанием направления сигнала светофора в форме стрелки; в ином случае – выполнение стратегии адаптивного круиз-контроля, если направление наземной направляющей стрелки не совпадает с указанием направления сигнала светофора в форме стрелки.
Следует отметить, что в отношении дальнейших подробностей реализации и эффектов этого способа адаптивного круиз-контроля может быть сделана ссылка на вышеупомянутые варианты осуществления относительно системы адаптивного круиз-контроля, и подробности этого способа адаптивного круиз-контроля не будут повторно описаны в настоящем документе.
Также в одном варианте осуществления настоящего изобретения предоставлено транспортное средство настоящего изобретения, это транспортное средство может быть оснащено системой адаптивного круиз-контроля из вышеупомянутых вариантов осуществления.
Также в одном варианте осуществления настоящего изобретения предоставлен машиночитаемый носитель информации, при этом машиночитаемый носитель информации хранит инструкцию, которая заставляет машину выполнять способ адаптивного круиз-контроля согласно вышеупомянутым вариантам осуществления.
Также в одном варианте осуществления настоящего изобретения предоставлен компьютерный программный продукт, при этом данный компьютерный программный продукт исполняется на соответствующем компоненте транспортного средства, этот компьютерный программный продукт пригоден для выполнения инициализации программы, включающей этапы способа адаптивного круиз-контроля в вышеупомянутых вариантах осуществления.
Специалистам в данной области будет понятно, что варианты осуществления настоящего изобретения могут быть предоставлены в виде способа, устройства или компьютерного программного продукта. Как следствие, настоящее изобретение может иметь форму полностью аппаратного варианта осуществления, полностью программного варианта осуществления или программно-аппаратного варианта осуществления. Кроме того, настоящее изобретение может принимать форму компьютерного программного продукта, реализуемого на одном или нескольких используемых компьютером носителях данных, включая, но без ограничения, следующее: запоминающее устройство в виде магнитного диска, запоминающее устройство в виде доступного только для чтения компакт-диска (Compact Disc Read Only Memory, CD-ROM), оптическое запоминающее устройство, содержащее используемый компьютером программный код.
Это изобретение описано со ссылкой на блок-схему и/или функциональные схемы способов, устройств и компьютерных программных продуктов согласно вариантам осуществления настоящего изобретения. Следует понимать, что каждый процесс и/или блок в блок-схемах и/или функциональных схемах и сочетание данных процессов и/или блоков в блок-схемах и/или функциональных схемах могут быть реализованы командами компьютерной программы. Эти команды компьютерной программы могут быть предоставлены процессору компьютера общего назначения, компьютеру специального назначения, встроенному процессору или другому программируемому устройству для обработки данных для создания машины, так что команды, исполняемые процессором компьютера или другим программируемым устройством для обработки данных могут генерировать средства для реализации функций, указанных в одном или нескольких процессах блок-схемы и/или одном или нескольких блоках функциональной схемы.
Эти команды компьютерной программы также могут храниться в машиночитаемом запоминающем устройстве, способном управлять их выполнением особым образом компьютером или другим программируемым устройством обработки данных так, чтобы команды, хранимые в машиночитаемом запоминающем устройстве могли создавать изделие промышленного производства, содержащее командное устройство, реализующее функции, указанные в одном или нескольких процессах блок-схемы и/или одном или нескольких блоках функциональной схемы.
Эти команды компьютерной программы также могут быть загружены в компьютер или другое программируемое устройство обработки данных, так чтобы последовательность рабочих этапов могла быть выполнена на компьютере или другом программируемом устройстве для получение реализуемого на компьютере процесса, так что команды, исполняемые на компьютере или другом программируемом устройстве, обеспечивают этапы для реализации функций, указанных в одном или нескольких процессах блок-схемы и/или одном или нескольких блоках функциональной схемы.
В типичной конфигурации вычислительное устройство содержит один или несколько процессоров (например центральный процессор, ЦП), интерфейсы ввода/вывода, сетевые интерфейсы и запоминающее устройство.
Запоминающее устройство может включать оперативное запоминающее устройство, запоминающее устройство с произвольным доступом (Random Access Memory, RAM), и/или энергонезависимое запоминающее устройство в машиночитаемом носителе, такое как, запоминающее устройство, доступное только для считывания (Read-only Memory, ROM) или флеш-RAM. Запоминающее устройство является примером машиночитаемого носителя.
Машиночитаемый носитель включает энергонезависимый и энергозависимый, съемный и несъемный носитель, хранение на котором может осуществляться с применением любого способа или технологии. Информация может представлять собой машиночитаемые команды, структуры данных, модули компьютерной программы или другие данные. Примеры носителя компьютера для хранения включают, но без ограничения, следующее: оперативное запоминающее устройство с изменением фазы, статическое оперативное запоминающее устройство с произвольным доступом (Static Random Access Memory, SRAM), динамическое запоминающее устройство с произвольным доступом (Dynamic Random Access Memory, DRAM), другие типы RAM, ROM, электрически стираемое запоминающее устройство, доступное только для чтения (Electrically Erasable Programmable Read Only Memory, EEPROM), флеш-память или запоминающее устройство по другой технологии, CD-ROM, цифровой видеодиск (Digital Video Disc, DVD), или другое оптическое устройство хранения, устройство хранения на магнитных кассетах, магнитной ленте, магнитных дисках или других магнитных устройствах хранения или любой другой энергонезависимый носитель, эти носители для хранения компьютера могут быть использованы для хранения информации, к которой может иметь доступ вычислительное устройство.
Следует отметить, что такие термины, как «содержит», «включает» или любая другая их разновидность предназначены для охвата неисключительных включений, так что процессы, способы, изделия или устройства, которые включают последовательность элементов, не только включают данные элементы, но также включают другие элементы, явно не перечисленные или включают элементы, свойственные таким процессам, способам, товарам или устройствам. Без дальнейших ограничений элемент, обозначенный предложением «содержит одно...» не исключает наличия дополнительных идентичных элементов в процессе, способе, изделиях и устройствах, которые включают данные элементы.
Вышеупомянутые варианты осуществления являются только предпочтительными вариантами осуществления настоящего изобретения и не должны рассматриваться как ограничения настоящей заявки. Любые модификации, эквивалентные замены и улучшения, которые выполнены в рамках сущности и принципа настоящего изобретения, должны быть включены в объем правовой охраны настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА (ВАРИАНТЫ) КРУИЗ-КОНТРОЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2719122C2 |
| ЭКОНОМИЧНАЯ СИСТЕМА КРУИЗ-КОНТРОЛЯ | 2013 |
|
RU2637564C2 |
| СИСТЕМА КРУИЗ-КОНТРОЛЯ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ ЕЕ РАБОТЫ | 2015 |
|
RU2678416C2 |
| Способ адаптивного управления работой светофора на регулируемом перекрёстке | 2019 |
|
RU2710306C1 |
| СИСТЕМА (ВАРИАНТЫ) И СПОСОБ ДЛЯ УПРАВЛЕНИЯ ПЕРЕКЛЮЧЕНИЕМ ПЕРЕДАЧ ТРАНСПОРТНОГО СРЕДСТВА В РЕЖИМЕ КРУИЗ-КОНТРОЛЯ | 2017 |
|
RU2748955C2 |
| СПОСОБ ЭКСПЛУАТАЦИИ ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2013 |
|
RU2598874C2 |
| Система и способ управления светофором | 2021 |
|
RU2771975C1 |
| СПОСОБ УПРАВЛЕНИЯ ДОРОЖНЫМ ДВИЖЕНИЕМ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2018 |
|
RU2702477C2 |
| СИСТЕМА АДАПТИВНОГО КРУИЗ-КОНТРОЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2582317C2 |
| ПРОГРАММНО-АППАРАТНЫЙ СВЕТОФОРНЫЙ КОМПЛЕКС | 2023 |
|
RU2809750C1 |
Изобретение относится к области автоматического вождения и «умной» системе управления транспортом, к системе адаптивного круиз-контроля и способу адаптивного круиз-контроля, поддерживающих распознавание сигналов светофора. Система адаптивного круиз-контроля содержит беспроводной модуль приема и главный контроллер, связанный с беспроводным модулем приема и выполненный с возможностью получения первой информации о состоянии сигнала светофора, принятой от беспроводного модуля приема, и выполнения управления остановкой или адаптивного круиз-контроля исходя из первой информации о состоянии сигнала светофора. Главный контроллер содержит модуль обработки сигналов светофора, содержащий первый субмодуль обработки сигналов. Первый субмодуль обработки сигналов выполнен с возможностью определения цвета сигнала светофора, горящего в данный момент, согласно первой информации о состоянии сигнала светофора, и определения необходимости активации модуля управления остановкой или модуля адаптивного круиз-контроля согласно различным цветам сигналов светофора. Повышается безопасность вождения при эксплуатации. 3 н. и 9 з.п. ф-лы, 7 ил.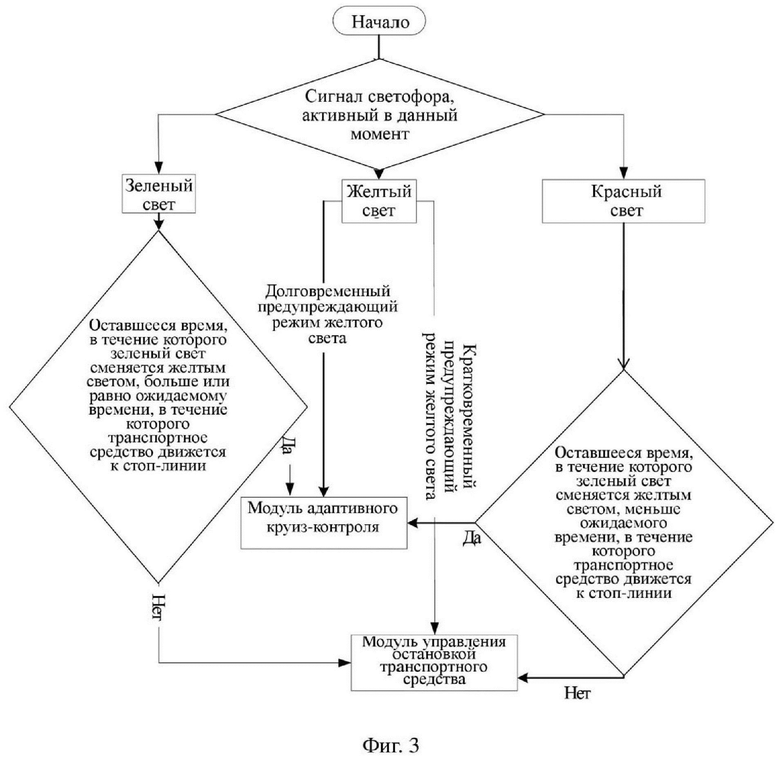
1. Система адаптивного круиз-контроля, поддерживающая распознавание сигналов светофора, содержащая
беспроводной модуль приема, совместимый с беспроводным модулем передачи светофора и выполненный с возможностью приема первой информации о состоянии сигнала светофора, касающейся сигнала светофора на данной дорожной полосе, отправляемой беспроводным модулем передачи; и
главный контроллер, связанный с беспроводным модулем приема и выполненный с возможностью получения первой информации о состоянии сигнала светофора, принимаемой от беспроводного модуля приема, и выполнения управления остановкой или адаптивного круиз-контроля, исходя из первой информации о состоянии сигнала светофора;
главный контроллер содержит модуль обработки сигналов светофора, модуль обработки сигналов светофора сконфигурирован для определения активации модуля управления остановкой или модуля адаптивного круиз-контроля в соответствии с первой информацией о состоянии светофора;
модуль обработки сигналов светофора содержит
первый субмодуль обработки сигналов, выполненный с возможностью определения цвета сигнала светофора, горящего в данный момент, согласно первой информации о состоянии сигнала светофора, и определения необходимости активации модуля управления остановкой или модуля адаптивного круиз-контроля согласно различным цветам сигналов светофора, который предусматривает
определение, когда горящий в данный момент сигнал светофора представляет собой зеленый свет, расчетного времени, в течение которого данное транспортное средство движется к целевой стоп-линии, и оставшегося времени, в течение которого активный в это время зеленый свет меняется на желтый свет, согласно первой информации о состоянии сигнала светофора, и активацию модуля управления остановкой при определении, что оставшееся время, в течение которого активный в это время зеленый свет меняется на желтый свет, короче, чем определенное расчетное время; в ином случае - активацию модуля адаптивного круиз-контроля;
определение, когда горящий в данный момент сигнал светофора представляет собой желтый свет, предупреждающего режима желтого света согласно первой информации о состоянии сигнала светофора, активацию модуля управления остановкой, если предупреждающий режим желтого света представляет собой кратковременный предупреждающий режим желтого света, или активацию модуля адаптивного круиз-контроля, если предупреждающий режим желтого света представляет собой долговременный предупреждающий режим желтого света; и
определение, когда горящий в данный момент сигнал светофора представляет собой красный свет, расчетного времени, в течение которого данное транспортное средство движется из своего текущего положения к целевой стоп-линии, и оставшегося времени, в течение которого активный в это время красный свет меняется на зеленый свет, согласно первой информации о состоянии сигнала светофора; активацию модуля управления остановкой, если оставшееся время, в течение которого активный в это время красный свет меняется на зеленый свет, дольше, чем определенное расчетное время; в ином случае - активацию модуля адаптивного круиз-контроля, если оставшееся время, в течение которого активный в это время красный свет меняется на зеленый свет, короче, чем определенное расчетное время или равно ему.
2. Система по п. 1, которая дополнительно содержит
камеру, связанную с главным контроллером и выполненную с возможностью получения второй информации о состоянии сигнала светофора, касающейся сигнала светофора на данной дорожной полосе, и отправки второй информации о состоянии сигнала светофора на главный контроллер;
при этом главный контроллер дополнительно выполнен с возможностью выполнения управления остановкой или адаптивного круиз-контроля, исходя из второй информации о состоянии сигнала светофора.
3. Система по п. 2, в которой главный контроллер дополнительно содержит модуль управления остановкой и модуль адаптивного круиз-контроля, при этом
модуль обработки сигналов светофора дополнительно выполнен с возможностью определения необходимости активации модуля управления остановкой или модуля адаптивного круиз-контроля согласно второй информации о состоянии сигнала светофора;
модуль управления остановкой выполнен с возможностью выполнения стратегии управления остановкой на транспортном средстве во время работы; и
модуль адаптивного круиз-контроля выполнен с возможностью выполнения стратегии адаптивного круиз-контроля на транспортном средстве во время работы.
4. Система по п. 3, в которой
модуль обработки сигналов светофора дополнительно содержит второй субмодуль обработки сигналов, выполненный с возможностью определения цвета сигнала светофора, горящего в данный момент, согласно второй информации о состоянии сигнала светофора, и определения необходимости активации модуля управления остановкой или модуля адаптивного круиз-контроля согласно сигналам светофора разных цветов, который предусматривает
определение условия смены света согласно второй информации о состоянии сигнала светофора, когда сигнал светофора, горящий в данный момент, представляет собой зеленый свет, активацию модуля управления остановкой при определении, что зеленый свет меняется на желтый свет, или активацию модуля адаптивного круиз-контроля при определении, что зеленый свет горит непрерывно;
определение условия смены света согласно второй информации о состоянии сигнала светофора, когда сигнал светофора, горящий в данный момент, представляет собой желтый свет, активацию модуля управления остановкой при определении, что желтый свет меняется на красный свет, или активацию модуля адаптивного круиз-контроля при определении, что желтый свет активен непрерывно; и
определение типа сигнала светофора согласно второй информации о состоянии сигнала светофора, когда сигнал светофора, горящий в данный момент, представляет собой красный свет, и получение состояния лампы сигнала правого поворота транспортного средства и указания направления наземной направляющей стрелки; активацию, если сигнал светофора представляет собой цилиндрический сигнал светофора, модуля управления остановкой, если лампа сигнала правого поворота транспортного средства не включена, или активацию модуля адаптивного круиз-контроля, если лампа сигнала правого поворота транспортного средства включена; активацию, если сигнал светофора представляет собой сигнал светофора в форме стрелки, модуля управления остановкой, если наземная направляющая стрелка совпадает с указанием направления сигнала светофора в форме стрелки, или активацию модуля адаптивного круиз-контроля, если наземная направляющая стрелка не совпадает с указанием направления сигнала светофора в форме стрелки.
5. Система по п. 2, в которой первая информация о состоянии сигнала светофора и вторая информация о состоянии сигнала светофора сконфигурированы с одинаковым содержимым или различным содержимым.
6. Система по п. 1, в которой главный контроллер представляет собой главный блок управления радара миллиметрового диапазона системы адаптивного круиз-контроля.
7. Система по любому из пп. 1-6, которая дополнительно содержит одно или несколько из группы, состоящей из
компонента восприятия, выполненного с возможностью передачи информации о движении транспортного средства на главный контроллер;
индикаторного прибора, выполненного с возможностью сообщения водителю о необходимости остановки, когда главный контроллер определяет необходимость активации модуля управления остановкой; и
двигателя, выполненного с возможностью выполнения управления крутящим моментом для остановки транспортного средства, когда главный контроллер определяет необходимость активации модуля управления остановкой; и
блока управления ESP, выполненного с возможностью выполнения управления замедлением для остановки транспортного средства, когда главный контроллер определяет необходимость активации модуля управления остановкой.
8. Способ адаптивного круиз-контроля, поддерживающий распознавание сигналов светофора, включающий
получение от беспроводного модуля приема транспортного средства первой информации о состоянии сигнала светофора, касающейся сигнала светофора на данной дорожной полосе, причем беспроводной модуль приема совместим с беспроводным модулем передачи светофора и выполнен с возможностью приема первой информации о состоянии сигнала светофора, отправленной с беспроводного модуля передачи; и
выполнение управления остановкой или адаптивного круиз-контроля, исходя из первой информации о состоянии сигнала светофора; при этом
упомянутое выполнение управления остановкой или адаптивного круиз-контроля, исходя из первой информации о состоянии сигнала светофора, включает
определение цвета сигнала светофора, горящего в данный момент;
определение, когда горящий в данный момент сигнал светофора определен как зеленый свет, расчетного времени, в течение которого транспортное средство движется из своего текущего положения к целевой стоп-линии, и оставшегося времени, в течение которого зеленый свет меняется на желтый свет, согласно первой информации о состоянии сигнала светофора, и выполнение стратегии управления остановкой при определении, что оставшееся время, в течение которого активный в это время зеленый свет меняется на желтый свет, короче, чем определенное расчетное время; в ином случае - выполнение стратегии адаптивного круиз-контроля;
определение, когда горящий в данный момент сигнал светофора представляет собой желтый свет, предупреждающего режима желтого света согласно первой информации о состоянии сигнала светофора, активацию стратегии управления остановкой, если предупреждающий режим желтого света определен как кратковременный предупреждающий режим желтого света, или выполнение стратегии адаптивного круиз-контроля, если предупреждающий режим желтого света определен как долговременный предупреждающий режим желтого света; и
определение, когда горящий в данный момент сигнал светофора представляет собой красный свет, расчетного времени, в течение которого данное транспортное средство движется из своего текущего положения к целевой стоп-линии, и оставшегося времени, в течение которого активный в это время красный свет меняется на зеленый свет, согласно первой информации о состоянии сигнала светофора; выполнение стратегии управления остановкой, если оставшееся время, в течение которого активный в это время красный свет меняется на зеленый свет, дольше, чем определенное расчетное время; в ином случае - выполнение стратегии адаптивного круиз-контроля, если оставшееся время, в течение которого активный в это время красный свет меняется на зеленый свет, короче, чем определенное расчетное время или равно ему.
9. Способ по п. 8, который дополнительно включает
получение второй информации о состоянии сигнала светофора, касающейся сигнала светофора на данной дорожной полосе, собранной камерой транспортного средства; и
выполнение управления остановкой или адаптивного круиз-контроля, исходя из второй информации о состоянии сигнала светофора.
10. Способ по п. 9, в котором упомянутое выполнение управления остановкой или адаптивного круиз-контроля, исходя из второй информации о состоянии сигнала светофора, включает
определение цвета сигнала светофора, горящего в данный момент, согласно второй информации о состоянии сигнала светофора;
определение, когда горящий в данный момент сигнал светофора представляет собой зеленый свет, условия смены света согласно второй информации о состоянии сигнала светофора, выполнение стратегии управления остановкой, когда зеленый свет меняется на желтый свет, или выполнение стратегии адаптивного круиз-контроля, когда зеленый свет горит непрерывно;
определение, когда горящий в данный момент сигнал светофора представляет собой желтый свет, условия смены света согласно второй информации о состоянии сигнала светофора, выполнение стратегии управления остановкой при определении, что желтый свет меняется на красный свет, или выполнение стратегии адаптивного круиз-контроля при определении, что желтый свет горит непрерывно; и
определение, когда горящий в данный момент сигнал светофора представляет собой красный свет, типа сигнала светофора согласно второй информации о состоянии сигнала светофора, и получение состояния лампы сигнала правого поворота транспортного средства и указания направления наземной направляющей стрелки; выполнение, если сигнал светофора представляет собой цилиндрический сигнал светофора, стратегии управления остановкой, если лампа сигнала правого поворота транспортного средства не включена или выполнение стратегии адаптивного круиз-контроля, если лампа сигнала правого поворота транспортного средства включена; выполнение, если сигнал светофора представляет собой сигнал светофора в форме стрелки, стратегии управления остановкой, если наземная направляющая стрелка совпадает с указанием направления сигнала светофора в форме стрелки, или выполнение стратегии адаптивного круиз-контроля, если наземная направляющая стрелка не совпадает с указанием направления сигнала светофора в форме стрелки.
11. Способ по п. 9, в котором первая информация о состоянии сигнала светофора и вторая информация о состоянии сигнала светофора сконфигурированы с одинаковым содержимым или различным содержимым.
12. Машиночитаемый носитель информации, на котором хранится компьютерная программа, посредством которой при исполнении машиной процессор реализует способ адаптивного круиз-контроля по любому из пп. 8-11.
| Станок для придания концам круглых радиаторных трубок шестигранного сечения | 1924 |
|
SU2019A1 |
| Способ получения цианистых соединений | 1924 |
|
SU2018A1 |
| Способ получения цианистых соединений | 1924 |
|
SU2018A1 |
| CN 206900370 U, 19.01.2018 | |||
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2014 |
|
RU2659341C2 |

