Настоящее изобретение относится к подшипникам скольжения, а именно, к методам регулирования физических свойств подшипников скольжения в процессе работы.
Дальнейшая терминология и обозначения приведены в соответствии с ГОСТ ИСО 7902-1-2001, 18282-88.
Важнейшими характеристиками режима работы подшипника скольжения являются относительный эксцентриситет ε, связанная с ним относительная толщина масляного слоя ξ=1-ε, характеристика режима λ=ηωB/p. Устойчивый режим работы подшипника скольжения в области надежной жидкостной смазки возможен при показателях 0,1 < ξ < 0,3 и λ > λкр, при которой слой смазки надежно разделяет вращающиеся части подшипника и одновременно сохраняет виброустойчивость к автоколебаниям вала.
Существующие теоретические методы расчета подшипников скольжения являются весьма приближенными и основываются на большом количестве допущений, в частности:
- смазочный материал соответствует ньютоновской жидкости;
- геометрия изделия идеально соответствует теоретическим уравнениям;
- колебания незначительны;
- физические параметры смазочного материала (вязкость, давление, толщина слоя и пр.) в осевом направлении постоянны;
- динамическая вязкость принимается постоянной величиной ηeff во всем диапазоне рабочих температур;
- обратимые и необратимые изменения вязкости не принимаются во внимание;
- точные температуры масляного слоя, вала и подшипника, которые определяют изменения относительного зазора подшипника в зависимости от температуры, заменены на средние значения Тeff;
- шероховатости поверхностей трения принимаются неизменными;
- значение коэффициента трения рассчитывается приблизительной аппроксимацией формул Петрова и Фогельполя;
- не принимается во внимание изменения жесткости и твёрдости поверхности вала и подшипника;
- не принимается во внимание теплоотвод от подшипника в окружающую среду.
В дополнение к перечисленным допущениям, реальные свойства подшипников скольжения значительно изменяются в процессе длительной эксплуатации и еще более отклоняются от идеальных.
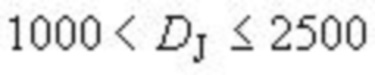
Применяемые в настоящее время способы сохранения устойчивого режима работы подшипника заключаются в увеличении коэффициента надежности κ (отношения λ/λкр) таким образом, чтобы максимально избежать приближения характеристики режима к критическим значениям, т.к. наиболее часто применяемые антифрикционные материалы (оловянные баббиты, свинцовые баббиты, бронзы свинцовые, алюминиевые сплавы и др.) быстро разрушаются в условиях полужидкостной и граничной смазки. На фигуре 1 приведен график коэффициента трения в зависимости от характеристики режима, абсолютной и относительной минимальной высоты масляного слоя hmin и ξ (кривая Герси – Штрибека). Узкая область полужидкостной смазки вблизи точки a заставляет избегать риска перехода в область граничного трения (левее а) и эксплуатировать изделия в области жидкостной смазки с высоким коэффициентом надежности.
В качестве примера можно привести численные показатели, например, для вала d=80мм, l/d=1 и характеристике режима λ=17*10-8. При классическом расчёте подшипника значения максимального и минимального зазора ξ= 0.15-0.7, κ=3.1-8.4, f=0.027-0.05. При этом рассчитанный коэффициент трения вблизи критической характеристики режима λкр (точка а на фиг.1) составляет fкр=0.0015, что говорит о более чем трехкратном превышении потерь на трение в рабочем режиме по сравнению с критическим.
Заявленный способ основан на использовании свойств современных антифрикционных материалов для изменения параметров подшипника без механического вмешательства, в частности, на изменение коэффициента трения, относительного зазора, вязкости смазочного материала. Диапазон данных параметров определяется выбором антифрикционного материала с соответствующими физическими свойствами, а изменяются они посредством изменения температуры в зоне трения подшипника. В результате может быть достигнуто управление выходными характеристиками узла трения, в частности, оборотами и нагрузкой, что расширяет диапазон характеристик производительности узла трения; трением, что снижает потери на трение, теплоотвод, расход масла, уменьшает пусковой момент; износом антифрикционного слоя, что повышает ресурс, обеспечивает приработку поверхности, приработку формы; зазорами, что уменьшает автоколебания, вибрации в разных диапазонах частот.
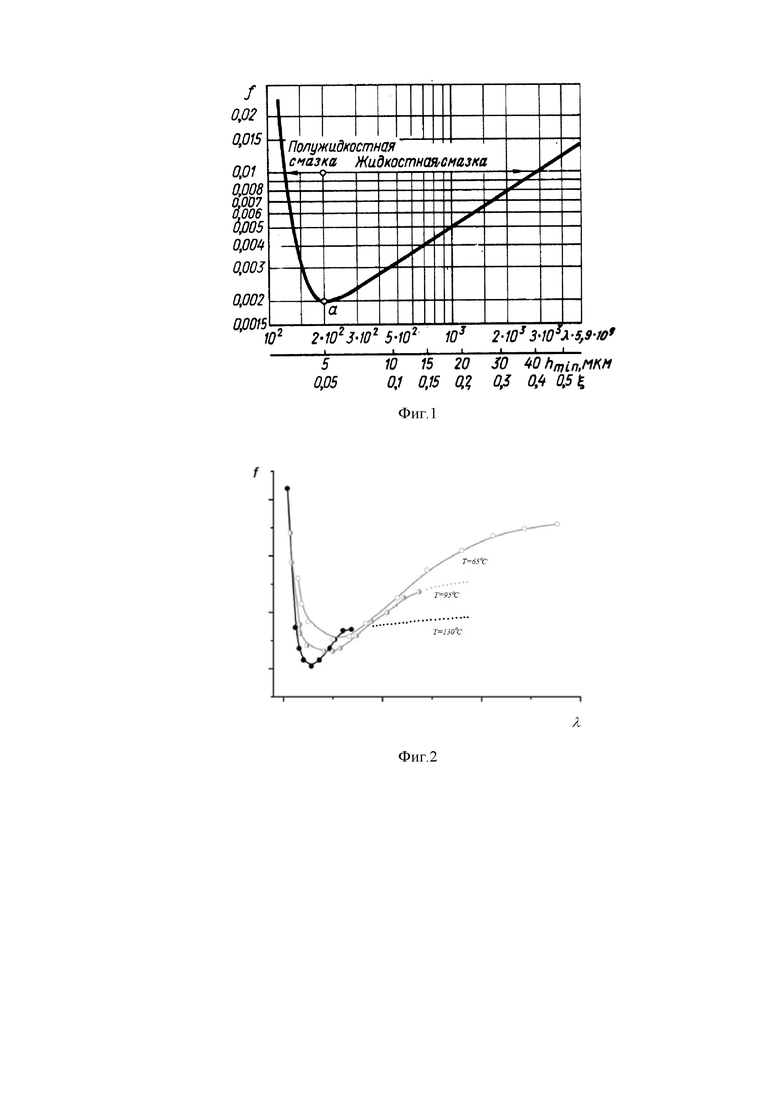
На фиг.2 приведён график, иллюстрирующий влияние температуры подшипника скольжения на коэффициент трения при разных режимах смазки и условие перехода подшипника в режим полужидкостного трения.
В качестве минимальной высоты смазочного слоя в настоящее время принимаются следующие значения, показанные в Таблице 1.
Физические свойства современных антифрикционных материалов обеспечивают высокую прирабатываемость подшипников для любых видов смазок. При этом шероховатость материала составляет единицы микрометров и менее, что позволяет существенно снизить высоту масляного клина для устойчивой работы подшипника, характеристику режима λ и коэффициент трения f (см. Таблицу 2).
Таблица 2.
Современные антифрикционные материалы имеют возможность работы при температурных режимах от -110 до 250°С, что позволяет использовать в широком диапазоне значений вязкость используемых смазок, расширяя режим жидкостной смазки в сторону более низких значений λ.
Из уровня техники известно техническое решение, направленное на продление срока службы подшипника скольжения (см. патент US4501534, опубл. 26.02.1985), в котором применяется снижение скорости вращения для снижения значений λ в климатическом оборудовании, что не всегда возможно, если речь идет о промышленном оборудовании.
Зависимость физических характеристик (в частности, пределов растяжения и сжатия, модуля упругости, твердости, и др.) антифрикционных материалов от температуры позволяет изменять поверхностные условия взаимодействия трущихся поверхностей в подшипниках скольжения, что, в свою очередь, позволяет снижать моменты страгивания и прирабатывать не только шероховатость, но и форму поверхности скольжения подшипников.
Управление температурой смазочного материала также позволяет регулировать температурное расширение деталей подшипника и компенсировать зазоры между трущимися поверхностями, образующиеся вследствие нарушений геометрии, ошибок расчетов и изготовления, выработки.
Из уровня техники известны технические решения, направленные, в частности, на компенсацию зазоров посредством внесения сложных конструктивных изменений в подшипник (см. патент US8303185, опубл. 09.09.2010 и патент US7559697, опубл. 14.07.2009).
Из уровня техники известны технические решения, направленные на поддержание температуры в подшипниках, например, патент CN 110513398, опубл. 29.11.2019, патент JPH06134651, опубл. 17.05.1994, патент US 4948269 А, опубл. 14.08.1990. Однако, данные технические решения направлены на поддержание температуры в подшипниках качения.
В качестве наиболее близкого аналога выбрана система отвода тепла от роликового подшипника (см. патент США US 4948269 А, опубл. 14.08.1990), в которой необходимость отвода или подвода тепла к подшипнику определяется на основании данных, полученных от термостатов, настроенных поддерживать температуру в заданном рабочем диапазоне.
Однако данный метод направлен на контроль состояния работы подшипников качения, которые имеют, по сравнению с подшипниками скольжения, другой диапазон рабочих температур и другие физические условия работы. Известный метод не может быть применен для управления характеристикой режима работы подшипника скольжения.
Техническая проблема, на решение которой направлено настоящее изобретение, заключается в расширении функциональности подшипника скольжения и повышении надежности его работы.
Технический результат, достигаемый при решении технической проблемы, заключается в снижении потерь на трение при работе подшипника скольжения и уменьшении его пускового момента с одновременным расширением эксплуатационных характеристик подшипника без изменения его конструкции, снижением влияния ошибок в расчётах и изготовлении подшипника на его работу и упрощением конструкции подшипника скольжения ввиду исключения необходимости внесения конструктивных изменения подшипника для защиты от перегрева при работе.
Техническая проблема решается, а технический результат достигается за счет того, что способ управления характеристикой режима работы подшипника скольжения, включает этапы, на которых: а) определяют температурную зависимость динамической вязкости смазочного материала подшипника скольжения; б) определяют температуру перехода подшипника скольжения от полужидкостного трения к жидкостному трению; в) на основании температурной зависимости динамической вязкости смазочного материала определяют температурную зависимость характеристики режима работы λ(Т) и значение характеристики режима работы λкр перехода подшипника скольжения от полужидкостного трения к жидкостному трению; г) измеряют рабочую температуру подшипника скольжения; д) регулируют значение рабочей температуры подшипника скольжения для поддержания рабочего значения характеристики режима работы λраб близким к λкр в диапазоне, являющемся переходным между полужидкостным трением и жидкостным трением. Предпочтительно, λраб поддерживается в диапазоне 1.05*λкр ≤ λраб ≤ 1.10*λкр .
Техническая проблема решается, а технический результат достигается также в следующем частном варианте реализации способа.
В способе управления характеристикой режима работы подшипника скольжения на этапе б) могут регулировать значение рабочей температуры подшипника скольжения посредством изменения одного или нескольких параметров из группы: температуры смазочного материала подшипника скольжения; температуры трущихся деталей подшипника; внешнего температурного воздействия на подшипник скольжения; температуры корпуса подшипника скольжения; расхода смазочного материала в зоне трения.
Настоящее изобретение раскрывает также подшипник скольжения, который может быть использован для реализации предложенного способа и который снабжён антифрикционной рабочей поверхностью и содержит термодатчик с возможностью измерения текущей рабочей температуры подшипника скольжения.
В одном из частных вариантов реализации подшипника скольжения антифрикционная рабочая поверхность может быть выполнена на основе антифрикционных полимерных материалов.
В одном из частных вариантов реализации подшипник скольжения дополнительно может включать один или несколько датчиков из группы: датчик оборотов; датчик давления; датчики температуры поверхностей трения подшипника; датчик температуры смазочного материала; датчик температуры корпуса подшипника; датчик моментов; датчики положения; вибрационные датчики; датчик потребляемой мощности.
За счёт выявления температуры и характеристики режима работы λкр перехода подшипника скольжения от полужидкостного трения к жидкостному трению и последующего поддержания характеристики режима работы λраб близким к λкр в диапазоне, являющемся переходным между полужидкостным трением и жидкостным трением, посредством регулирования рабочей температуры подшипника скольжения обеспечивается возможность снижения энергетических потерь на трение, снижение влияния погрешностей и дефектов на трущихся поверхностях подшипника скольжения. Также, за счёт удержания характеристики режима работы λраб близким к λкр исключается необходимость внесения конструктивных изменений в подшипник скольжения, направленных на постоянное охлаждение подшипника во время работы, поскольку исключается возможность выхода подшипника на значения температуры, превышающие его рабочие возможности. Другими словами, обеспечивается упрощение конструкции подшипника, что, в свою очередь, обеспечивает упрощение как изготовления подшипника скольжения, так и облегчение его эксплуатации. Поскольку, как было показано выше, большинство характеристик подшипника скольжения зависит от его рабочей температуры, то регулировка значения рабочей температуры подшипника позволит существенно снизить влияние ошибок в расчётах и изготовлении подшипника на его работу.
Изменение температуры подшипника перед запуском позволяет снизить коэффициенты трения покоя между трущимися частями, что уменьшает пусковой момент.
Таким образом, заявленные технические решения обеспечивают надежность работы подшипника скольжения и расширяют его функциональность.
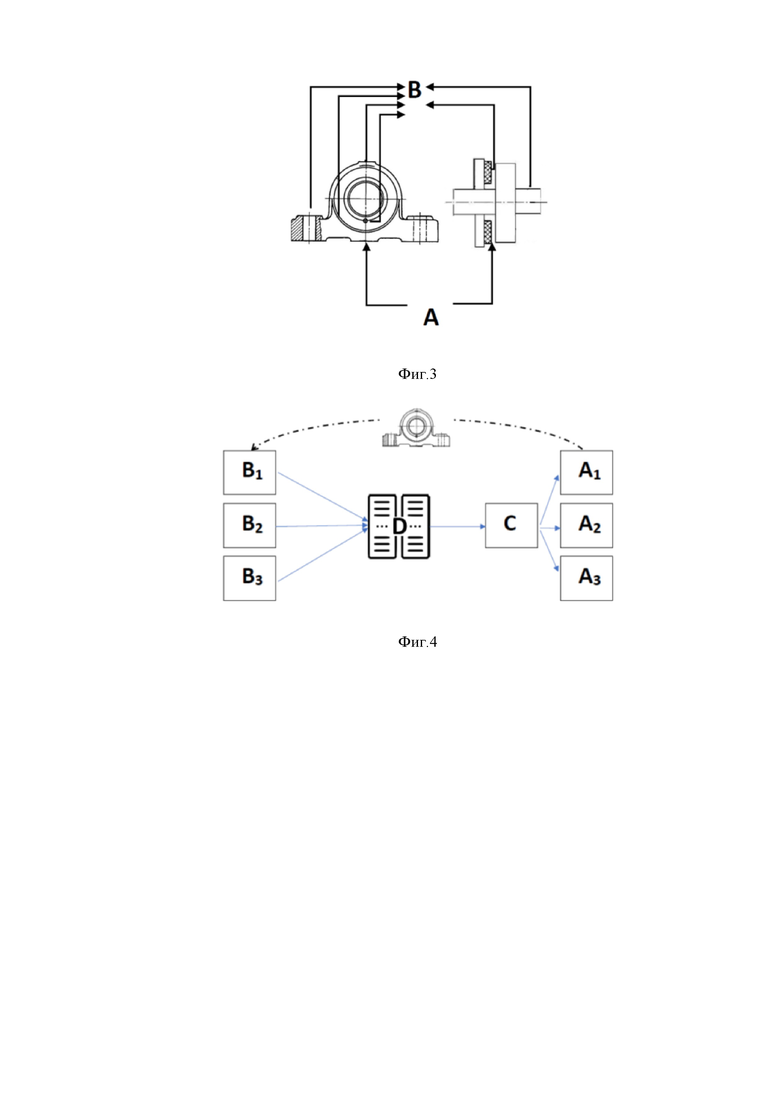
Заявленный способ управления характеристикой режима работы подшипника скольжения поясняется чертежами. На фиг.1 приведен график коэффициента трения в зависимости от характеристики режима, абсолютной и относительной минимальной высоты масляного слоя hmin и ξ. На фиг.2 приведён график, иллюстрирующий влияние температуры подшипника скольжения на коэффициент трения при разных режимах смазки. На фиг.3 и фиг.4 схематично показан процесс управления характеристикой режима работы подшипника скольжения.
Предложенный способ управления характеристикой режима работы подшипника скольжения реализуется следующим образом.
При определении температурной зависимости динамической вязкости смазочного материала подшипника скольжения и температуры перехода подшипника скольжения от полужидкостного трения к жидкостному трению обеспечивается возможность определения температурной зависимости характеристики режима работы λ(Т) для подшипника с любым смазочным материалом, известным для специалиста в данной области техники. На основании переходного значения температуры обеспечивается возможность определения значения характеристики режима работы λкр перехода подшипника скольжения от полужидкостного трения к жидкостному трению. После измерения текущей рабочей температуры подшипника скольжения посредством термодатчика, размещенного внутри подшипника обеспечивается возможность регулировки значения рабочей температуры подшипника скольжения для поддержания рабочего значения характеристики режима работы λраб близким к λкр в диапазоне, являющемся переходным между полужидкостным трением и жидкостным трением, предпочтительно, в диапазоне 1.05*λкр ≤ λраб ≤ 1.10*λкр, основываясь на полученной температурной зависимости λ(Т). Данная регулировка может реализовываться посредством изменения одного или нескольких параметров подшипника скольжения: температуры смазочного материала подшипника скольжения; температуры трущихся деталей подшипника; внешнего температурного воздействия на подшипник скольжения; температуры корпуса подшипника скольжения; расхода смазочного материала в зоне трения.
Предлагаемый способ является гибким инструментом изменений характеристик подшипника для выполнения широкого спектра задач. В качестве примеров реализации способа можно привести следующие варианты.
Вариант 1. Изменение рабочей температуры подшипника посредством изменения температуры пары трения непосредственно в зоне трения путем изменения температуры антифрикционного слоя и/или трущихся деталей подшипника (вала, шеек вала, колодок, подушек, вкладышей, сепараторов и т.д.).
Вариант 2. Изменение рабочей температуры подшипника посредством изменения температуры смазочного материала в подшипнике путем изменения температуры смазочного материала на входе в подшипник, путем изменения подачи (расхода) смазочного материала в зону трения, путем изменений условий теплоотвода в зонах охлаждения смазочного материала, путем подогрева смазочного материала в накопителях или подводящих устройствах и т.д.
Вариант 3. Изменение рабочей температуры подшипника посредством изменения температуры корпуса подшипника путем изменения условий отдачи тепла в окружающую среду, путем изменения температуры окружающей среды, путем нагрева корпуса подшипника и т.д.
Подшипник скольжения для реализации способа управления характеристикой режима работы подшипника скольжения может быть любым известным для специалиста в данной области техники подшипником скольжения, снабжённым антифрикционной рабочей поверхностью и содержащий термодатчик с возможностью измерения текущей рабочей температуры подшипника скольжения. Антифрикционная рабочая поверхность может быть выполнена на основе антифрикционных полимерных материалов.
Для управления температурными и тепловыми параметрами подшипника скольжения используются конструктивные элементы А (см. фиг.3 и 4). Например, такие как:
- нагревательные элементы внутри конструкции подшипника для регулирования температуры трущихся частей, в частности, колодок, вкладышей, шейки вала, сепаратора и др.; или
- нагревательные элементы внутри и снаружи маслосистемы подшипника скольжения, средства управления расходом масла, средства управления мощностью принудительного теплоотвода для регулирования температуры смазочного материала на входе подшипника, расхода смазочного материала, мощности теплоотвода маслоохладителя, мощность нагревательного устройства картера, мощности нагревательного устройства маслосборника, мощность нагревательного устройства маслопровода; или
- регулируемое воздушное или иное охлаждение корпуса подшипника, нагревательные элементы внутри корпуса подшипника для регулирования средней температуры корпуса подшипника, температуры окружающей среды, скорости воздушного охлаждения, мощности теплоотвода корпуса подшипника, мощности нагрева корпуса подшипника.
Все перечисленные конструктивные элементы приведены в качестве примеров и могут иметь любое конструктивное исполнение, известное для специалиста в данной области техники, и это конструктивное исполнение не является объектом рассмотрения данной заявки.
Значение характеристик подшипника Ψi принимается с помощью установленных датчиков В, в частности, датчика оборотов; датчика давления; датчиков температуры поверхностей трения подшипника; датчиков температуры смазочного материала; датчиков температуры корпуса подшипника; датчика моментов; датчиков положения; вибрационные датчиков; датчика потребляемой мощности и др.
Регулирующие сигналы передаются на элементы А посредством блоков управления С, которые могут быть, например, интегрированы в систему управления предприятия, или любую другую информационную систему D, осуществляющую сбор данных В, их анализ, прогнозирование и обратную связь.
Оператором может выбрать одну или несколько характеристик подшипника Ψi(Тi), которыми необходимо управлять с помощью изменения температурных или тепловых параметров, например:
- режим работы, в частности, пуски, остановы, нагрузки и обороты;
- мощность сил трения, определяемая, например, через температуру смазочного материала на выходе из подшипника скольжения и расход смазочного материала;
- момент сил трения покоя (пусковые моменты);
- скорость износа антифрикционного слоя, определяемую через непосредственные замеры зазоров (например, посредством датчиков) и/или виброхарактеристики и др.;
- вибрационные характеристики.
Выбор любых других характеристик подшипника скольжения и их комбинаций, не указанных настоящем описании, в качестве управляемых с помощью температурных или тепловых параметров не ограничивает распространение описываемого способа на методы управления других выбранных характеристик.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРОИЗВОДСТВА КОНСТРУКЦИОННОЙ КОМПОЗИТНОЙ СТРУКТУРЫ С ПОЛИМЕРНОЙ ПОВЕРХНОСТЬЮ | 2022 |
|
RU2783637C1 |
| ПОДШИПНИК СКОЛЬЖЕНИЯ | 2013 |
|
RU2528246C1 |
| УПОРНЫЙ ПОДШИПНИК СКОЛЬЖЕНИЯ | 1996 |
|
RU2115037C1 |
| СПОСОБ СНИЖЕНИЯ ТРЕНИЯ И ПУСКОВОГО МОМЕНТА В ПОДШИПНИКАХ СКОЛЬЖЕНИЯ | 1999 |
|
RU2141581C1 |
| ОПОРНО-УПОРНЫЙ ПОДШИПНИК СКОЛЬЖЕНИЯ, РАБОТАЮЩИЙ НА МАЛОВЯЗКОЙ ЖИДКОСТИ | 1999 |
|
RU2186266C2 |
| Подшипник скольжения | 1980 |
|
SU905522A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ПОДШИПНИКА СКОЛЬЖЕНИЯ | 2017 |
|
RU2741972C2 |
| Сферический подшипник скольжения | 1988 |
|
SU1548543A1 |
| ПОДШИПНИК СКОЛЬЖЕНИЯ | 2011 |
|
RU2463492C1 |
| Опора скольжения | 1984 |
|
SU1254217A1 |
Настоящее изобретение относится к подшипникам скольжения, а именно к методам регулирования физических свойств подшипников скольжения в процессе работы. Способ управления характеристикой режима работы подшипника скольжения включает этапы, на которых: а) определяют температурную зависимость динамической вязкости смазочного материала подшипника скольжения; б) определяют температуру перехода подшипника скольжения от полужидкостного трения к жидкостному трению; в) на основании температурной зависимости динамической вязкости смазочного материала определяют температурную зависимость характеристики режима работы λ(Т) и значение характеристики режима работы λкр перехода подшипника скольжения от полужидкостного трения к жидкостному трению; г) измеряют рабочую температуру подшипника скольжения; д) регулируют значение рабочей температуры подшипника скольжения для поддержания рабочего значения характеристики режима работы λраб близким к λкр в диапазоне, являющемся переходным между полужидкостным трением и жидкостным трением. Технический результат - снижение потерь на трение при работе подшипника скольжения, уменьшение его пускового момента с одновременным расширением эксплуатационных характеристик подшипника без изменения его конструкции, снижение влияния ошибок в расчётах и изготовлении подшипника на его работу и упрощение конструкции подшипника скольжения. 2 н. и 4 з.п. ф-лы, 4 ил., 2 табл.
1. Способ управления характеристикой режима работы подшипника скольжения, включающий этапы, на которых:
а) определяют температурную зависимость динамической вязкости смазочного материала подшипника скольжения;
б) определяют температуру перехода подшипника скольжения от полужидкостного трения к жидкостному трению;
в) на основании температурной зависимости динамической вязкости смазочного материала определяют температурную зависимость характеристики режима работы λ(Т) и значение характеристики режима работы λкр перехода подшипника скольжения от полужидкостного трения к жидкостному трению;
г) измеряют рабочую температуру подшипника скольжения;
д) регулируют значение рабочей температуры подшипника скольжения для поддержания рабочего значения характеристики режима работы λраб близким к λкр в диапазоне, являющемся переходным между полужидкостным трением и жидкостным трением.
2. Способ по п.1, в котором на этапе д) рабочее значение характеристики режима работы λраб поддерживается в диапазоне 1.05* λкр ≤ λраб ≤ 1.10* λкр.
3. Способ по п.1, в котором на этапе д) регулируют значение рабочей температуры подшипника скольжения посредством изменения одного или нескольких параметров из группы: температуры смазочного материала подшипника скольжения; температуры трущихся деталей подшипника; внешнего температурного воздействия на подшипник скольжения; температуры корпуса подшипника скольжения; расхода смазочного материала в зоне трения.
4. Подшипник скольжения для реализации способа по п.1, снабжённый антифрикционной рабочей поверхностью и содержащий термодатчик с возможностью измерения текущей рабочей температуры подшипника скольжения.
5. Подшипник скольжения по п.4, в котором антифрикционная рабочая поверхность выполнена на основе антифрикционных полимерных материалов.
6. Подшипник скольжения по п.4, дополнительно включающий один или несколько датчиков из группы: датчик оборотов; датчик давления; датчики температуры поверхностей трения подшипника; датчик температуры смазочного материала; датчик температуры корпуса подшипника; датчик моментов; датчики положения; вибрационные датчики; датчик потребляемой мощности.
| US 4948269 A, 14.08.1990 | |||
| 0 |
|
SU166258A1 | |
| Опора скольжения с устройством для контроля ее режима работы | 1987 |
|
SU1530848A1 |
| 0 |
|
SU401534A1 | |

