Область техники, к которой относится изобретение
Изобретение относится к устройству позиционирования и способу образования электропроводящего соединения между стационарной зарядной станцией и транспортным средством, в частности электробусом или аналогичным транспортным средством, причем устройство позиционирования выполнено с возможностью перемещения электрического зарядного контакта устройства позиционирования относительно поверхности зарядного контакта и установления контакта между ними, причем устройство позиционирования содержит шарнирно-сочлененную консоль и приводное устройство для привода шарнирно-сочлененной консоли, причем шарнирно-сочлененная консоль выполнена с возможностью перемещения зарядного контакта между контактным положением для передачи тока и втянутым положением для прерывания передачи тока, причем приводное устройство содержит привод перемещения для создания перестановочного усилия, действующего на шарнирно-сочлененную консоль, причем приводное устройство содержит регулирующее устройство, выполненное с возможностью управления приводом перемещения.
Уровень техники
Такие устройства позиционирования и способы известны в уровне техники и, как правило, применяются в транспортных средствах с электроприводом, перемещающихся между остановками. Речь может идти как об электробусах, так и о принципиально иных транспортных средствах, в частности, поезде или трамвае, не имеющих постоянного электрического соединения с контактным проводом или иным подобным устройством. В таких транспортных средствах зарядка накопителя электроэнергии осуществляется зарядной станцией на остановке. Транспортное средство на остановке образует электрическое соединение с зарядной станцией, причем накопитель энергии заряжается по меньшей мере настолько, чтобы транспортное средство могло достигнуть следующей остановки с зарядной станцией на маршруте. Для установки электрического соединения между транспортным средством и зарядной станцией применяют устройство позиционирования, которое может быть установлено на крыше транспортного средства или, в альтернативном варианте, над транспортным средством, например, на мачте. После этого устройство позиционирования может соединять зарядный контакт с поверхностью зарядного контакта, что позволяет заряжать транспортное средство или накопитель энергии на остановке.
При сведении зарядного контакта и поверхности зарядного контакта важно, чтобы зарядный контакт был прижат к поверхности зарядного контакта с определенным усилием, позволяющим обеспечить надежное электрическое соединение. Устройство позиционирования над транспортным средством раскрыто в патентной заявке DE 202014007218 U1, причем устройство позиционирования содержит шарнирно-сочлененную консоль и приводное устройство. Приводное устройство содержит привод перемещения и пружинное устройство, предназначенные для перемещения шарнирно-сочлененной консоли относительно поверхности зарядного контакта транспортного средства. В частности, для подъема шарнирно-сочлененной консоли требуется усилие привода перемещения.
Недостаток известных устройств позиционирования заключается в том, что они должны быть выполнены или установлены в расчете на определенную высоту контакта, то есть определенное расстояние между устройством позиционирования во втянутом положении для хранения зарядного контакта относительно контактного положения для передачи тока в транспортное средство. Это означает, что относительное расстояние между контактным положением и втянутым положением не может быть изменено и должно постоянно регулироваться или адаптироваться путем изменения конструкции, поскольку в противном случае не удастся обеспечить необходимое или желаемое усилие контакта с поверхностью зарядного контакта. В частности, при изменении типа транспортного средства и, следовательно, его высоты возможны значительные колебания относительного расстояния между втянутым и контактным положением вследствие изменения высоты контактных поверхностей транспортных средств над проезжей частью. То же самое справедливо для различной загрузки транспортного средства или опускания транспортного средства или автобуса в зоне остановки для облегчения доступа, например, лиц с ограниченными возможностями. При опускании транспортного средства зарядный контакт перемещается по вертикали относительно поверхности зарядного контакта, если контактное усилие более не может поддерживаться.
Еще одним недостатком является то, что выдвижение электрического зарядного контакта происходит относительно медленно. Если транспортное средство должно быть заряжено в области остановки во время промежуточной остановки, время стоянки транспортного средства должно быть использовано для его зарядки как можно более эффективно. Однако быстрое выдвижение электрического зарядного контакта и тем самым быстрое образование контакта между поверхностью зарядного контакта и зарядным контактом невозможно, так как электрический зарядный контакт или поверхность зарядного контакта при этом в процессе образования контакта могут повредиться или сравнительно быстро износиться. Кроме того, при соприкосновении зарядного контакта и поверхности зарядного контакта могут иметь место нежелательные звуки, доставляющие неудобства пассажирам и людям, живущим по соседству с остановкой, или пугающие их.
Раскрытие сущности изобретения
Таким образом, задачей изобретения является разработка устройства позиционирования и способа образования электропроводящего соединения между транспортным средством и зарядной станцией, которые обеспечат увеличенное время зарядки при надежном контакте с транспортным средством.
Эта задача решена устройством позиционирования с признаками, раскрытыми в пункте 1 формулы, и способом с признаками, раскрытыми в пункте 11 формулы.
Устройство позиционирования согласно изобретению для образования электропроводящего соединения между стационарной зарядной станцией и транспортным средством, в частности электробусом или аналогичным транспортным средством, выполнено с возможностью перемещения электрического зарядного контакта устройства позиционирования относительно поверхности зарядного контакта и установления контакта между ними, причем устройство позиционирования содержит шарнирно-сочлененную консоль и приводное устройство для привода шарнирно-сочлененной консоли, причем шарнирно-сочлененная консоль выполнена с возможностью перемещения зарядного контакта между контактным положением для передачи тока и втянутым положением для прерывания передачи тока, причем приводное устройство содержит привод перемещения для создания перестановочного усилия, действующего на шарнирно-сочлененную консоль, причем приводное устройство содержит регулирующее устройство, выполненное с возможностью управления приводом перемещения, причем приводное устройство содержит сенсорное устройство, выполненное с возможностью обнаружения поверхности зарядного контакта или зарядного контакта, причем сенсорное устройство соединено с регулирующим устройством, причем регулирующее устройство выполнено с возможностью регулирования скорости зарядного контакта во время его движения от втянутого положения к контактному положению в зависимости от относительного расстояния между зарядным контактом и поверхностью зарядного контакта.
Таким образом, устройство позиционирования может входить в состав стационарной зарядной станции для транспортного средства с электрическим приводом или транспортного средства с электрическим приводом, причем устройство позиционирования служит для перемещения зарядного контакта зарядной станции или транспортного средства на поверхности зарядного контакта транспортного средства или зарядной станции и обеспечения электрического контакта с ним. Благодаря этому, можно обеспечить питание транспортного средства во время его остановки на зарядной станции электрической энергией и сохранение электроэнергии в транспортном средстве. Зарядный контакт перемещают на поверхности зарядного контакта в одну сторону и обратно при помощи шарнирно-сочлененной консоли и приводного устройства устройства позиционирования. Для этого зарядный контакт располагают на одном конце шарнирно-сочлененной консоли. Приводное устройство служит для перемещения зарядного контакта и, тем самым, шарнирно-сочлененной консоли из втянутого положения для хранения зарядного контакта в контактное положение для передачи тока или обеспечения контакта между поверхностью зарядного контакта и зарядным контактом. Перестановочное усилие прикладывают к шарнирно-сочлененной консоли посредством привода перемещения приводного устройства. Во время перемещения зарядного контакта перестановочное усилие зависит от механизма шарнирно-сочлененной консоли или передачи привода перемещения и почти не меняется.
Помимо этого приводное устройство содержит регулирующее устройство, которое, например, также может представлять собой электронную аппаратуру регулирования привода перемещения. При этом электронная аппаратура регулирования может быть интегрирована непосредственно в привод перемещения, в транспортное средство или в зарядную станцию. Далее, посредством сенсорного устройства приводного устройства возможно детектировать или обнаружить поверхность зарядного контакта или зарядный контакт и определить ее (его) положение. Так как сенсорное устройство связано с регулирующим устройством, становится возможным определить или высчитать посредством регулирующего устройства относительное расстояние между зарядным контактом и поверхностью зарядного контакта. Для этого не имеет принципиального значения, связано ли сенсорное устройство с регулирующим устройством непосредственно, при помощи электрических проводов, или речь идет о беспроводной связи. Благодаря определению относительного расстояния становится возможным посредством регулирующего устройства регулировать скорость зарядного контакта во время его движения от втянутого положения к контактному положению в зависимости от относительного расстояния между зарядным контактом и поверхностью зарядного контакта. Таким образом, скорость вначале может быть почти сколь угодно высокой, при условии, что зарядный контакт в своей последней фазе движения от втянутого положения к контактному положению достаточно медленный, так что не происходит повреждения зарядного контакта или поверхности зарядного контакта и/или не создается нежелательно высокого уровня шума, вызванного процессом образования контакта. Благодаря такому регулированию движения выдвижения или скорости зарядного контакта становится возможным сравнительно быстрее обеспечивать контакт зарядного контакта с поверхностью зарядного контакта, за счет чего выгодным образом увеличивается время зарядки транспортного средства во время промежуточной стоянки на остановке. Одновременно с этим можно положительным образом влиять на возникновение звуков при соприкосновении зарядного контакта и поверхности зарядного контакта. Опционально может быть предусмотрена возможность аналогичным образом при помощи регулирующего устройства регулировать движение зарядного контакта от контактного положения к втянутому положению.
Привод перемещения выполнен с возможностью создания контактного усилия, действующего на поверхность зарядного контакта, причем привод перемещения может содержать регулирующее устройство и электродвигатель, выполненный с возможностью управления посредством регулирующего устройства. Таким образом в контактном положении позиционирующее устройство может создавать определенное контактное усилие, действующее на поверхность зарядного контакта. Во втянутом положении на шарнирно-сочлененную консоль, напротив, может действовать лишь очень малое перестановочное усилие или вовсе никакого, так что движения шарнирно-сочлененной консоли или зарядного контакта произойти не может. При соприкосновении зарядного контакта и поверхности зарядного контакта перестановочное усилие может быть повышено посредством привода перемещения, что ведет к возникновению или повышению контактного усилия, действующего на поверхность контактного заряда. Регулирующее устройство может, в частности, регистрировать крутящий момент электродвигателя, например, по расходу энергии и регулировать электродвигатель таким образом, чтобы он передавал определенное контактное усилие посредством шарнирно-сочлененной консоли и зарядного контакта на поверхность зарядного контакта. После этого можно активно адаптировать непосредственное воздействие усилия на шарнирно-сочлененную консоль и, возможно, на зарядный контакт, возможно в зависимости от различных факторов влияния. Таким образом, возможно независимо от относительного расстояния между поверхностью зарядного контакта и устройства позиционирования или от высоты транспортного средства обеспечивать постоянное контактное усилие на поверхности зарядного контакта.
Если привод перемещения содержит бесщеточный электродвигатель, становится возможным выполнение особенно большого количества циклов перемещения. Бесщеточный электродвигатель нуждается в техническом обслуживании значительно меньше и реже, чем электродвигатель со щеточным механизмом с такими же механическими характеристиками. Таким образом, можно получить, по существу, устройство позиционирования с увеличенными интервалами техобслуживания или увеличенным сроком службы. В качестве бесщеточного двигателя или электродвигателя без скользящих контактов между ротором и статором можно использовать, например, асинхронную машину с короткозамкнутым ротором или синхронную машину с электронным возбуждением вращающегося поля или бесщеточный двигатель постоянного тока.
Привод перемещения может представлять собой линейный привод, предпочтительно привод ходовым винтом, особенно предпочтительно привод ходовым винтом без автоматического торможения. В таком случае привод ходовым винтом может содержать соответствующий ходовой винт с шагом резьбы, способным предотвратить автоматическое торможение привода ходовым винтом. Линейный привод может обеспечивать перемещение шарнирно-сочлененной консоли из втянутого положения в контактное положение, и наоборот. В частности, ходовой винт может представлять собой шарико-винтовую пару или ходовой винт с трапецеидальной резьбой, который может быть соединен с электродвигателем.
Сенсорное устройство может содержать по меньшей мере один датчик, причем этот датчик может быть механическим переключателем, индуктивным датчиком, емкостным датчиком, магнитным датчиком, ультразвуковым датчиком, радиолокационным датчиком и/или оптическим датчиком. Опционально сенсорное устройство может содержать несколько датчиков одного или разных типов. За счет этого гарантируется, что при выходе из стоя одного из датчиков или при различных условиях окружающей среды по меньшей мере один датчик сможет распознать или обнаружить поверхность зарядного контакта. В простом варианте осуществления датчик может быть выполнен в виде механического переключателя, который образует контакт с поверхностью зарядного контакта до зарядного контакта и таким образом приводится в действие. Особенно предпочтительны индуктивные и емкостные датчики приближения, если требуется небольшое расстояние срабатывания. Большие расстояния срабатывания могут быть реализованы в случае магнитного датчика. Ультразвуковой датчик имеет достаточную дальность действия и сравнительно надежен в эксплуатации. Радиолокационный датчик может измерять расстояние до поверхности зарядного контакта, даже если она покрыта слоем снега или грязи. Оптические датчики особенно хорошо приспособлены для измерения расстояния и сравнительно независимы от условий окружающей среды. Оптический датчик может быть выполнен с использованием инфракрасного света, лазера или обычных светодиодов.
Датчик может быть расположен на шарнирно-сочлененной консоли, в частности вблизи зарядного контакта, или на поверхности зарядного контакта. При этом существенно, чтобы датчик был расположен таким образом, чтобы он мог определять относительное расстояние между поверхностью контактного заряда и контактным зарядом. При этом может быть предусмотрено расположение датчика на дистальном конце шарнирно-сочлененной консоли вблизи зарядного контакта. Также возможно расположение датчика на поверхности зарядного контакта, если датчик при этом может обнаруживать зарядный контакт или относительное расстояние. Тогда расположенный на поверхности зарядного контакта датчик может, например, беспроводным образом передавать информацию о расстоянии регулирующему устройству. Таким образом, становится возможным оснащать зарядные станции соответствующими датчиками, даже если регулирующее устройство установлено на транспортном средстве, и наоборот.
Привод перемещения и/или шарнирно-сочлененная консоль может содержать датчик перемещения и/или датчик положения. Использование датчика перемещения позволяет установить диапазон, в пределах которого шарнирно-сочлененная консоль может перемещаться с помощью привода перемещения. В качестве датчика перемещения можно использовать, например, инкрементный датчик или датчик абсолютных значений. В этом случае можно будет в любой момент времени определять точное рабочее положение привода перемещения или зарядного контакта. Кроме того, привод перемещения может содержать концевые выключатели, срабатывающие в зависимости от положения, и/или нажимные выключатели, срабатывающие в зависимости от приложенного усилия. Кроме того, величину контактного усилия можно ограничить за счет того, что привод перемещения может выдвигаться лишь до определенного конечного положения. Кроме того, для ограничения контактного усилия можно использовать дополнительный нажимной выключатель, который самостоятельно или вместе с концевыми выключателями может использоваться для ограничения привода перемещения. Нажимной выключатель может быть расположен непосредственно на зарядном контакте или на шарнирно-сочлененной консоли, или на приводе перемещения. Однако эти датчики не являются частью сенсорного устройства и поэтому не подходят для непосредственного определения относительного расстояния от зарядного контакта до поверхности зарядного контакта.
Приводное устройство может содержать пружинное устройство, механически взаимодействующее с приводом перемещения. Пружинное устройство может содержать по меньшей мере одну пружину растяжения или пружину сжатия, способную упруго воздействовать на шарнирно-сочлененную консоль. В предпочтительном варианте можно использовать пружину растяжения, так как пружину растяжения можно особенно легко соединить с шарнирно-сочлененной консолью. Также возможен вариант, в котором пружинное устройство будет содержать несколько пружин, и на шарнирно-сочлененную консоль будет постоянно действовать упругая сила. Соответственно, пружина может быть предварительно напряжена в любом положении шарнирно-сочлененной консоли. В альтернативном варианте для создания упругой силы можно использовать пружину сжатия. Такое пружинное устройство отличается особенной прочностью, простотой и низкой стоимостью изготовления.
Пружина пружинного устройства может быть механически соединена с шарнирно-сочлененной консолью посредством рычага передачи пружинного устройства, причем в зависимости от положения шарнирно-сочлененной консоли эффективную длину рычага можно изменять. Таким образом, рычаг может быть закреплен непосредственно на шарнирно-сочлененной консоли, в результате чего упругая сила пружины может непосредственно передаваться на шарнирно-сочлененную консоль. В зависимости от положения или направления упругой силы пружины и расположения рычага на шарнирно-сочлененной консоли эффективная длина рычага может уменьшаться, если угол между направлением усилия пружины и протяжением рычага меньше или больше 90°. Кроме того, эффективная длина рычага может изменяться вследствие того, что пружина закреплена с упором на шарнирно-сочлененной консоли посредством возвратной передачи, образованной, например, кулачковым диском или тягой. В этом случае кулачковый диск образует рычаг возвратной передачи. Эффективная длина рычага может зависеть от положения кулачкового диска относительно пружины. Таким образом, независимо от положения шарнирно-сочлененной консоли можно обеспечить воздействие постоянного возвратного усилия на шарнирно-сочлененную консоль или, в зависимости от положения шарнирно-сочлененной консоли, увеличивать или уменьшать возвратное усилие в соответствии с конкретными требованиями. Кроме того, возвратное усилие можно адаптировать к перестановочному усилию и контактному усилию. Предпочтительно, возвратное усилие выбирают таким образом, чтобы в любом положении шарнирно-сочлененной консоли в случае отказа привода перемещения, обусловленного, например, сбоем питания, возвратное усилие обеспечивало автоматическое втягивание зарядного контакта. Это позволяет повысить эксплуатационную надежность устройства позиционирования.
В предпочтительном варианте осуществления устройство позиционирования может содержать удерживающее устройство для крепления устройства позиционирования над транспортным средством на мачте или путепроводе, причем пружинное устройство может содержать по меньшей мере одну возвратную пружину для создания возвратного усилия, действующего на шарнирно-сочлененную консоль, причем в этом случае возвратное усилие больше силы тяжести шарнирно-сочлененной консоли, противодействующей возвратной пружине. Удерживающая рама может образовывать или содержать, например, неподвижные опоры для шарнирно-сочлененной консоли и привода перемещения. В частности, возвратная пружина или привод перемещения могут быть закреплены непосредственно на неподвижной опоре удерживающей рамы. Удерживающую раму можно особенно легко закрепить на мачте или путепроводе, а также крыше остановки, туннеля или иного сооружения, под которым может двигаться транспортное средство. Поскольку устройство позиционирования может быть расположено над транспортным средством, привод перемещения можно выполнить в виде опускающего привода, предназначенного для опускания контактного элемента, и может механически взаимодействовать с пружинным устройством или возвратной пружиной. После соприкосновения поверхности зарядного контакта с зарядным контактом можно легко вернуть зарядный контакт во втянутое положение на устройстве позиционирования над транспортным средством, если пружинное устройство посредством, по меньшей мере, одной возвратной пружины передает возвратное усилие на шарнирно-сочлененную консоль. В связи с тем, что возвратное усилие может превышать силу тяжести шарнирно-сочлененной консоли, противодействующую возвратной пружине, шарнирно-сочлененная консоль может перемещаться из контактного положения во втянутое положение, даже если привод перемещения в настоящее время не получает питания. Даже если зарядный контакт находится во втянутом положении, возвратное усилие противодействует силе тяжести и, предпочтительно, немного превышает его, предотвращая опускание или выдвижение зарядного контакта, если на шарнирно-сочлененную консоль не воздействует дополнительная сила.
В следующем предпочтительном варианте осуществления устройство позиционирования может содержать удерживающее устройство для крепления устройства позиционирования к крыше транспортного средства, причем пружинное устройство может содержать по меньшей мере одну подъемную пружину для создания подъемного усилия, действующего на шарнирно-сочлененную консоль, причем в этом случае подъемное усилие может быть меньше силы тяжести шарнирно-сочлененной консоли, противодействующей подъемной пружине. Удерживающая рама также может образовывать или содержать неподвижные опоры для шарнирно-сочлененной консоли и приводного устройства, но крепится на крышу транспортного средства. Удерживающую раму можно легко установить на крыше посредством амортизаторов, опор и/или изоляторов. Это позволяет особенно легко заменять устройство позиционирования. Если устройство позиционирования закреплено на крыше транспортного средства, привод перемещения может представлять собой подъемный привод для выдвижения зарядного контакта, способный механически взаимодействовать с пружинным устройством. В этом случае соприкосновение поверхности зарядного контакта с зарядным контактом также может быть легко осуществлено путем выдвижения зарядного контакта в контактное положение, если пружинное устройство содержит по меньшей мере подъемную пружину для создания подъемного усилия, воздействующей на шарнирно-сочлененную консоль вместе с перестановочным усилием привода перемещения, причем подъемное усилие может быть меньше силы тяжести шарнирно-сочлененной консоли, противодействующего подъемной пружине. Таким образом, сила тяжести шарнирно-сочлененной консоли и зарядного контакта, расположенного на шарнирно-сочлененной консоли, может обеспечить перемещение шарнирно-сочлененной консоли из контактного положения во втянутое положение, не используя привод перемещения. Предпочтительно, подъемное усилие, противодействующее силе тяжести, должн быть немного меньше ее, чтобы обеспечить опускание зарядного контакта, например, в случае отключения питания. Кроме того, подъемное усилие поддерживает привод перемещения, когда он воздействует на шарнирно-сочлененную консоль при ее выдвижении, что позволяет развивать лишь минимально необходимое перестановочное усилие.
Шарнирно-сочлененная консоль может быть выполнена в виде однорычажной системы или ножничной системы, предпочтительно с направляющей в виде параллелограмма, или в виде пантографа. Таким образом, шарнирно-сочлененная консоль позволяет осуществлять параллельное перемещение зарядного контакта из втянутого положения в контактное положение на поверхности зарядного контакта. На шарнирно-сочлененной консоли могут быть предусмотрены демпфирующие элементы, обеспечивающие плавность хода.
Приводное устройство может быть выполнено с возможностью соединения с информационной шиной транспортного средства. Так например привод перемещения может управляться напрямую посредством информационной шины. Сенсорное устройство также может быть подключено к информационной шине, так что регулирующее устройство может быть расположено в любом месте транспортного средства.
Согласно описываемому изобретением способу образования электропроводящего соединения между стационарной зарядной станцией и транспортным средством, в частности электробусом или аналогичным транспортным средством, посредством устройства позиционирования перемещают электрический зарядный контакт относительно поверхности зарядного контакта и образуют контакт между ними, причем шарнирно-сочлененную консоль устройства позиционирования приводят в движение посредством приводного устройства устройства позиционирования, причем зарядный контакт посредством шарнирно-сочлененной консоли позиционируют между контактным положением для передачи тока и втянутым положением для прекращения передачи тока, причем посредством привода перемещения приводного устройства создают перестановочное усилие, действующее на шарнирно-сочлененную консоль, причем посредством регулирующего устройства приводного устройства управляют привода перемещения, причем посредством сенсорного устройства приводного устройства обнаруживают поверхность зарядного контакта или зарядный контакт, причем сенсорное устройство соединено с регулирующим устройством, причем скорость зарядного контакта во время его движения от втянутого положения к контактному положению регулируют посредством регулирующего устройства в зависимости от относительного расстояния между зарядным контактом и поверхностью зарядного контакта. Преимущества способа, описываемого изобретением, соответствуют преимуществам устройства позиционирования, описываемого изобретением.
Во время своего движения от втянутого положения к контактному положению зарядный контакт может испытывать сначала положительное, а потом отрицательное ускорение. Отрицательное ускорение может воздействовать на зарядный контакт, в частности, после обнаружения поверхности зарядного контакта или зарядного контакта с предопределенным относительным расстоянием от зарядного контакта до поверхности зарядного контакта.
Во время движения зарядного контакта от втянутого положения к контактному положению зарядный контакт на первом отрезке движения может быть перемещен с постоянной и/или максимальной скоростью, а на втором отрезке движения до достижения контактного положения - с относительно сниженной скоростью. Это значит, что зарядный контакт сначала как можно быстрее выдвигают из втянутого положения, чтобы незадолго до контактного положения затормозить его и привести в контакт с поверхностью зарядного контакта. Это регулирование выдвижения зарядного контакта позволяет произвести соприкосновение зарядного контакта и поверхности зарядного контакта быстрее, чем раньше, за счет чего выгодным образом может быть увеличено время зарядки. Далее зарядный контакт перед достижением поверхности зарядного контакта может быть заторможен таким образом или его скорость может быть снижена таким образом, что зарядный контакт и поверхность зарядного контакта будут приведены в контакт сравнительно медленно. Таким образом может быть снижена вероятность механического повреждения зарядного контакта и поверхности зарядного контакта, а также их износ. Кроме того, в этом случае почти не возникает неприятных звуков при образовании контакта.
Постоянная или максимальная скорость может составлять ≥100 мм/с, предпочтительно ≥360 мм/с, особенно предпочтительно ≥500 мм/с.
Сниженная скорость при достижении контактной позиции может составлять по меньшей мере 70%, предпочтительно 50%, особенно предпочтительно 30% постоянной и/или максимальной скорости или 0 мм/с. Таким образом гарантируется, что зарядный контакт не ударяет о поверхность зарядного контакта с максимальной скоростью. За счет определения относительного расстояния регулирующее устройство может и сниженную скорость уменьшать до тех пор, пока она при достижении контактного положения не будет составлять 0 мм/с, то есть, пока зарядный контакт не остановится.
Скорость может быть снижена перед достижением контактного положения при относительном расстоянии, составляющем ≤150 мм, предпочтительно ≤100 мм, особенно предпочтительно ≤50 мм. Это относительное расстояние находится в диапазоне обнаружения самых разных датчиков и, таким образом, может быть легко определено сенсорным устройством. В этом случае зарядный контакт также может на большом участке своего пути по направлению к поверхности контактного заряда быть перемещен с высокой скоростью.
Особенно предпочтительно, если скорость перед достижением контактного положения может быть снижена в соответствии с линейной функцией или приближенной функцией. Регулирующее устройство может содержать регулирующий орган, который регулирует это снижение скорости, например, после сигнала сенсорного устройства, если зарядный контакт не превышает заданного относительного расстояния.
Кроме того, по меньшей мере один датчик сенсорного устройства может непрерывно передавать значение расстояния или определенное пороговое значение относительного расстояния регулирующему устройству. Так может быть предусмотрено, что датчик постоянно передает относительное расстояние или действительное значение относительного расстояния регулирующему устройству. В качестве альтернативы датчик может только в случае, если не превышено ранее определенное относительное расстояние, по меньшей мере один раз передать сигнал регулирующему устройству. После приема сигнала регулирующее устройство может снизить скорость зарядного контакта.
Привод перемещения может прикладывать контактное усилие к поверхности зарядного контакта, причем электродвигатель привода перемещения может управляться посредством регулирующего устройства.
Крутящий момент электродвигателя может быть зарегистрирован регулирующим устройством, причем возможно регулирование контактного усилия в зависимости от крутящего момента электродвигателя посредством регулирующего устройства.
Контактное усилие может быть получено независимо от относительного расстояния от поверхности зарядного контакта или контактного положения до втянутого положения устройства позиционирования. Это позволяет осуществлять контакт с устройством позиционирования даже транспортным средствам с различной высотой относительно проезжей части.
В контактном положении контактное усилие может оставаться постоянным во время изменения относительного расстояния от поверхности зарядного контакта или контактного положения до втянутого положения устройства позиционирования. Изменение относительного расстояния от транспортного средства до проезжей части всегда приводит к изменению относительного расстояния от контактного положения до втянутого положения. Изменение относительного расстояния может быть вызвано опусканием транспортного средства посредством шасси или нагрузкой транспортного средства. Поскольку контактное усилие относительно велико по сравнению с перестановочным усилием, контактное усилие можно практически не менять даже при изменении относительного расстояния. Постоянное контактное усилие, не зависящее от относительного расстояния, легче получить в том случае, когда контактным усилием управляет регулирующее устройство в зависимости от крутящего момента электродвигателя. Если относительное расстояние вследствие опускания транспортного средства увеличивается, то уменьшается контактное усилие и, следовательно, непосредственно крутящий момент электродвигателя, который впоследствии снова увеличивается регулирующим устройством, что дает постоянное контактное усилие. И наоборот, уменьшение относительного расстояния приводит к повышению контактного усилия и, следовательно, крутящего момента, которому регулирующее устройство может противодействовать путем уменьшения крутящего момента.
Посредством регулирующего устройства может быть отрегулирован крутящий момент электродвигателя в зависимости от положения шарнирно-сочлененной консоли или привода перемещения. Это позволяет оптимально адаптировать непосредственное воздействие усилия на шарнирно-сочлененную консоль и, при необходимости, адаптировать контактный элемент к соответствующему положению шарнирно-сочлененной консоли, что позволяет обеспечить воздействие постоянного усилия на поверхность зарядного контакта независимо от положения шарнирно-сочлененной консоли. Например, положение шарнирно-сочлененной консоли может быть определено посредством датчика перемещения, а крутящий момент может быть уже адаптирован регулирующим устройство в зависимости от положения, так что больше не требуется резко изменять крутящий момент для настройки контактного усилия.
Кроме того, посредством регулирующего устройства можно детектировать достижение контактного положения при превышении граничного значения крутящего момента. В контактном положении зарядный контакт соприкасается с поверхностью зарядного контакта, в результате чего крутящий момент электродвигателя значительно увеличивается. Регулирующее устройство может расценивать такое увеличение крутящего момента как достижение контактного положения. При этом, например, может быть отключено возможное управление частотой вращения электродвигателя, так как в контактном положении достаточно простой подстройки крутящего момента электродвигателя. Кроме того, в контактном положении регулирующее устройство может подавать, например, сигнал разрешения передачи энергии с зарядной станции. Дополнительные датчики определения контактного положения для этого не требуются.
Посредством регулирующего устройства может быть ограничен и поддержан на постоянном уровне крутящий момент электродвигателя при достижении заданного крутящего момента. Ограничение крутящего момента в первую очередь предотвращает перегрузку электродвигателя. Кроме того, это позволяет поддерживать постоянное контактное усилие. То же самое относится к скорости выдвижения и втягивания зарядного контакта, которую можно ограниченно увеличить.
Посредством регулирующего устройства может быть установлено заданное значение крутящего момента с диапазоном допуска±10%. Этот диапазон допуска вполне достаточен для получения по существу постоянного контактного усилия, поэтому можно отказаться от особо точной регистрации крутящего момента электродвигателя регулирующим устройством. Таким образом, можно снизить стоимость регулирующего устройства.
Посредством регулирующего устройства максимальная частота вращения электродвигателя может быть достигнута через 0-7 секунд работы электродвигателя, предпочтительно через 1-3 секунды. Это позволяет уменьшить или предотвратить непосредственное воздействие усилия, а также вибрацию привода перемещения и шарнирно-сочлененной консоли. Управляемый таким образом пуск электродвигателя также способствует увеличению срока службы устройства позиционирования.
Посредством регулирующего устройства можно регулировать частоту вращения электродвигателя таким образом, чтобы зарядный контакт по меньшей мере на некоторых участках перемещался с постоянной скоростью. Например, возможен вариант, в котором зарядный контакт будет выдвигаться из втянутого положения с положительным ускорением или втягиваться с отрицательным ускорением, однако на протяжении большей части пути перемещения до контактного положения будет перемещаться с постоянной скоростью.
Посредством дополнительного сенсорного устройства приводного устройства может быть обнаружена зарядная станция или транспортное средство, причем регулирующее устройство может определять относительное расстояние зарядного контакта во втянутом положении и в контактном положении, причем регулирующее устройство может перед остановкой транспортного средства у зарядной станции инициировать движение зарядного контакта из втянутого положения. В соответствии с этим посредством дополнительного сенсорного устройства может быть определено горизонтальное расстояние от транспортного средства до зарядной станции, причем зарядный контакт может быть контролируемым образом выдвинут из втянутого положения, когда расстояние оказывается ниже порогового значения, так что когда транспортное средство находится в предусмотренном для зарядки положении под зарядной станцией, зарядный контакт уже находится вплотную под поверхностью зарядного контакта, или наоборот. Таким образом время зарядки может быть выгодным образом продлено еще больше. Возможен и обратный случай, когда зарядная станция содержит зарядный контакт, а транспортное средство - поверхность зарядного контакта. Дополнительное сенсорное устройство также может содержать по меньшей мере один из вышеназванных датчиков. При необходимости дополнительное сенсорное устройство может быть интегрировано в сенсорное устройство.
Регулирующее устройство может определять относительную высоту зарядного контакта и/или контактного положения над транспортным средством, причем регулирующее устройство может определять высоту транспортного средства над дорогой. Предпочтительно, если высота транспортного средства над дорогой известна, в частности, так как эта высота может сильно варьироваться в зависимости от загрузки транспортного средства. Высота может определяться, например, посредством шасси транспортного средства или посредством датчиков, выполненных специально для этой цели. Исходя из высоты транспортного средства над дорогой и положения зарядного контакта относительно транспортного средства во втянутом положении посредством регулирующего устройства может быть вычислена высота зарядного контакта относительно дороги. Если известна высота поверхности зарядного контакта над дорогой, если речь идет, например, о зарядной станции, можно регулировать скорость выдвижения или максимальную скорость зарядного контакта при выдвижении из втянутого положения, еще до того, как транспортное средство достигнет зарядной станции.
Прочие предпочтительные варианты осуществления способа следуют из зависимых пунктов формулы изобретения, относящихся к пункту 1 формулы с описанием устройства.
Краткое описание чертежей
Предложенное изобретение детально рассматривается ниже на основании предпочтительных вариантов осуществления, изображенных на фигурах:
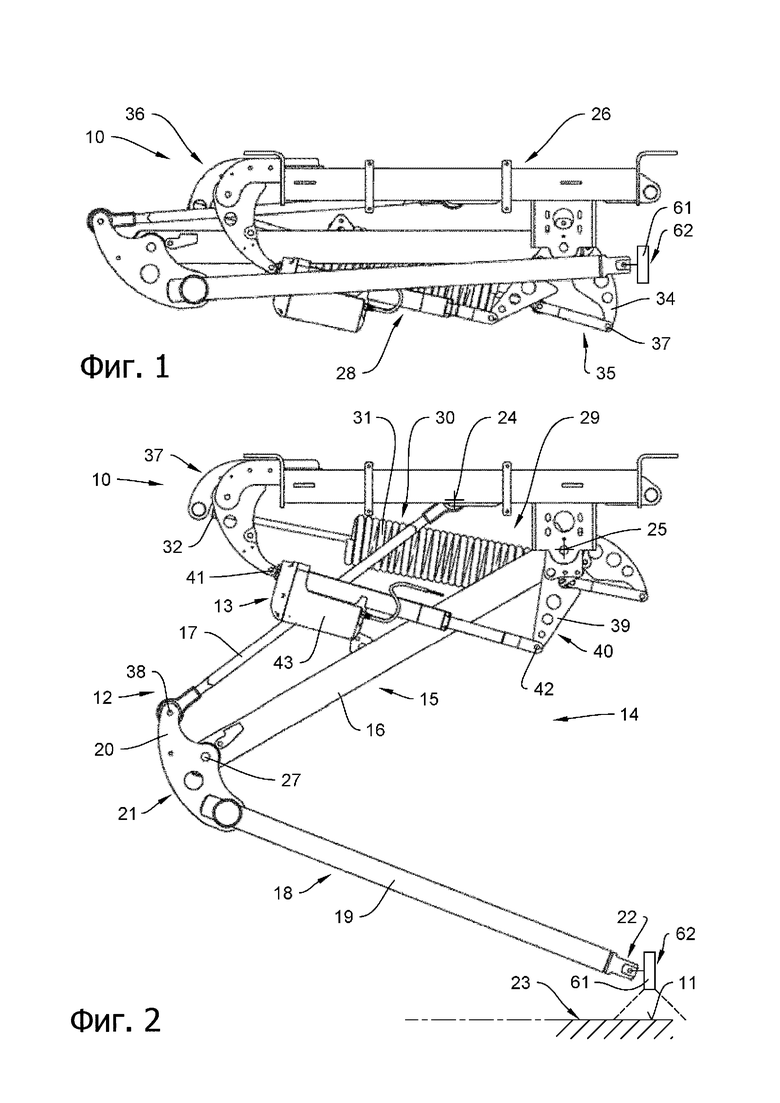
фигура 1: первый вариант осуществления устройства позиционирования во втянутом положении на виде сбоку.
фигура 2: устройство позиционирования в контактном положении на виде сбоку.
фигура 3: второй вариант осуществления устройства позиционирования в контактном положении на виде в аксонометрии.
фигура 4: укрупненный вид фрагмента с фигуры 3.
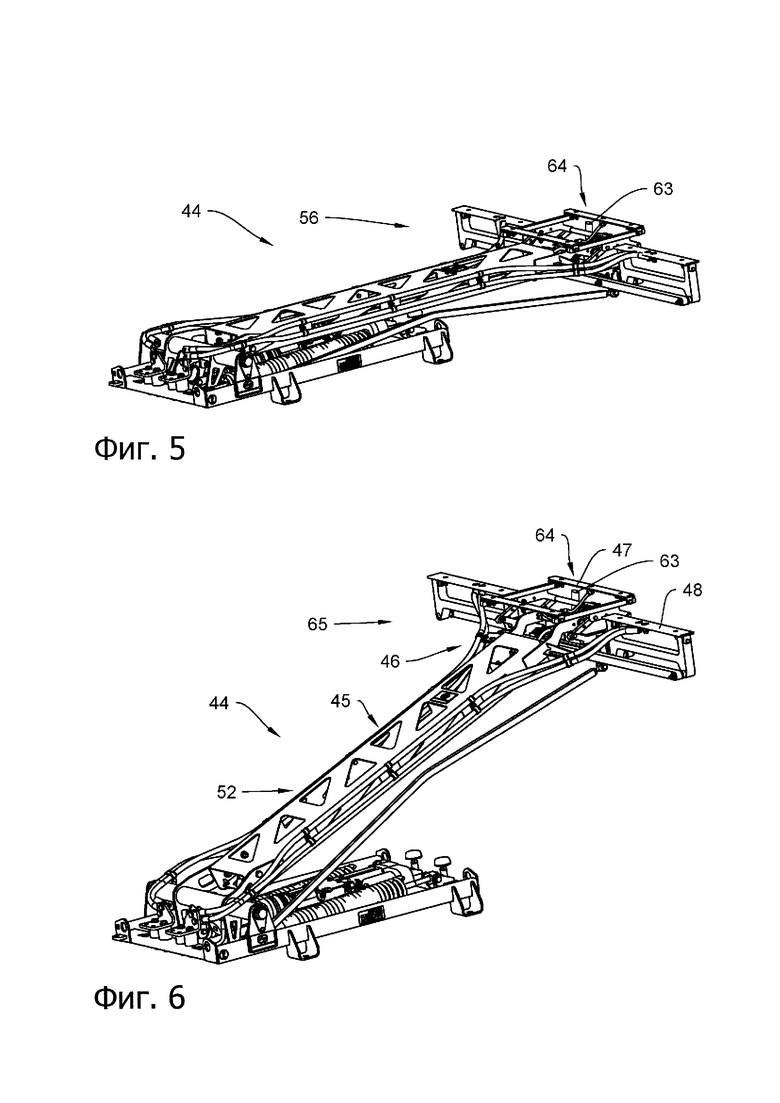
фигура 5: устройство позиционирования с фигуры 3 во втянутом положении на виде в аксонометрии.
фигура 6: устройство позиционирования с фигуры 3 в контактном положении на виде в аксонометрии.
Осуществление изобретения
На фигурах 1 и 2 первый вариант осуществления устройства 10 позиционирования изображен в разных положениях. Соприкосновение с поверхностью 11 зарядного контакта в этом случае показано лишь условно. Устройство 10 позиционирования содержит шарнирно-сочлененную консоль 12 и привод 13 перемещения для привода шарнирно-сочлененной консоли 12. Шарнирно-сочлененная консоль 12 выполнена в виде однорычажной системы 14 и содержит верхний ножничный механизм 15 с консолью 16 верхнего ножничного механизма и верхней соединительной тягой 17 и нижний ножничный механизм 18 с консолью 19 нижнего ножничного механизма и нижней соединительной тягой 20. На консоли 16 верхнего ножничного механизма верхний соединительный элемент 21 установлен с возможностью поворота, благодаря чему держатель 22 устройства 10 позиционирования для не показанного на фигуре электрического зарядного контакта устройства 10 позиционирования может всегда перемещаться параллельно горизонтальной плоскости 23. Для этого верхний соединительный элемент 21 соединен с верхней соединительной тягой 17 через ось 38. Консоль 19 нижнего ножничного механизма и нижняя соединительная тяга 20 закреплены на неподвижных опорах 24 и 25 удерживающей рамы 26 устройства 10 позиционирования с возможностью поворота. Консоль 19 нижнего ножничного механизма соединена осью 27 с консолью 16 верхнего ножничного механизма с возможностью поворота. Таким образом, поворот консоли 16 верхнего ножничного механизма приводит к перемещению держателя 22 параллельно горизонтальной плоскости 23.
Привод 13 перемещения выполнен в виде линейного привода 28. Пружинное устройство 29 устройства 10 позиционирования оснащено возвратной пружиной 30, выполненной в виде пружины 31 растяжения. Пружина 31 растяжения закреплена на неподвижной опоре 32 на удерживающей раме 26 и на оси 33 рычага 34. Рычаг 34 вместе с осью 33 и пружиной 31 растяжения образует возвратную передачу 35. В зависимости от положения шарнирно-сочлененной консоли 12 рычаг 34, соединенный с консолью 19 нижнего ножничного механизма без возможности проворачивания, поворачивается относительно пружины 31 растяжения, в результате чего эффективная длина рычага 34 уменьшается или увеличивается. Во втянутом положении 36 и в контактном положении 37 устройства 10 позиционирования пружина 31 растяжения действует непосредственно на ось 33. Если шарнирно-сочлененная консоль 12 выдвинута еще дальше, эффективная длина рычага 34 значительно уменьшается за счет поворота. Это позволяет адаптировать пружину 31 растяжения или ее эффективную возвратную силу к положению устройства 10 позиционирования. Шарнирно-сочлененная консоль 12 вместе с приводом 13 перемещения (включая не показанный на фигуре зарядный контакт) обладает обусловленной конструкцией силой тяжести, воздействующей на зарядный контакт или держатель 22. Пружина 31 растяжения создает упругое или возвратное усилие, превышающее силу тяжести, благодаря чему независимо от положения устройства 10 позиционирования гарантируется возврат устройства 10 позиционирования во втянутое положение 36 даже в случае отключения питания.
На шарнирно-сочлененной консоли 12 или консоли 19 нижнего ножничного механизма неподвижно закреплен рычаг 39, образующий регулирующую передачу 40 для шарнирно-сочлененной консоли 11. На оси 41 рычага 39 закреплен линейный привод 28 с возможностью поворота. Линейный привод 28 дополнительно жестко соединен с удерживающей рамой 26 через ось 42. Линейный привод 28 приводится от электродвигателя 43 и выполнен без автоматического торможения. Например, в случае сбоя питания пружина 31 растяжения может автоматически перемещать шарнирно-сочлененную консоль 12 из контактного положения 37 во втянутое положение 36, в результате чего линейный привод 28 втягивается. Таким образом, линейный привод 28 также служит для демпфирования перемещения шарнирно-сочлененной консоли 12. Кроме того, устройство 10 позиционирования содержит регулирующее устройство, не показанное подробно на фигуре, к которому подключен электродвигатель 43. Посредством регулирующего устройства регистрируют крутящий момент электродвигателя 43, причем регулирующее устройство настраивает крутящий момент электродвигателя 43 в зависимости от контактного усилия, с которым не показанный на фигуре зарядный контакт воздействует на поверхность 11 зарядного контакта. Контактное усилие достаточно велико для образования электрического контакта и может поддерживаться, по существу, постоянным в контактном положении 37 или любом ином контактном положении благодаря регулированию крутящего момента электродвигателя 43.
Привод 13 перемещения или электродвигатель 43 могут управляться посредством не показанного здесь регулирующего устройства. На держателе 22 консоли 19 нижнего ножничного механизма расположен датчик 61 сенсорного устройства 62, посредством которого может быть определено относительное расстояние от датчика 61 до плоскости 23 или поверхности 11 зарядного контакта. Таким образом может быть определено и относительное расстояние от не показанного здесь зарядного контакта до поверхности 11 зарядного контакта. Так как сенсорное устройство 62 связано с регулирующим устройством, скорость зарядного контакта во время его движения от втянутого положения 36 к контактному положению 37 может регулироваться регулирующим устройством в зависимости от измеренного или определенного относительного расстояния между зарядным контактом и поверхностью 11 зарядного контакта.
На фигурах 3-6 изображен второй вариант осуществления устройства 44 позиционирования, установленного на крыше транспортного средства с электрическим приводом, не показанного на фигурах. Устройство 44 позиционирования содержит, по существу, шарнирно-сочлененную консоль 45, на конце 46 которой предусмотрены зарядные контакты 47 и 48 для соприкосновения с поверхностью зарядного контакта, расположенной над транспортным средством и не показанной на фигурах. Кроме того, устройство 44 позиционирования содержит привод 49 перемещения и пружинное устройство 50, а также удерживающую раму 51. Шарнирно-сочлененная консоль 45 выполнена в виде однорычажной системы 52, аналогичной описанной выше однорычажной системе. Пружинное устройство 50 содержит две пружины 53 растяжения, выполненные в виде подъемных пружин 54 и создающие подъемное усилие, действующую на шарнирно-сочлененную консоль 45. Величину подъемного усилия выбирают таким образом, чтобы сила тяжести шарнирно-сочлененной консоли 45 вместе с зарядными контактами 47 и 48 была больше подъемного усилия, благодаря чему шарнирно-сочлененная консоль 45 будет опускаться из рабочего положения 55 или не показанного здесь контактного положения во втянутое положение 56 даже при отказе питания. Таким образом, привод 49 перемещения содержит линейный привод 57 без автоматического торможения с электродвигателем 58, который подключен к не показанному на фигурах регулирующему устройству устройства 44 позиционирования и управляется им. Регулирующее устройство регистрирует крутящий момент электродвигателя 58, причем регулирующее устройство регулирует крутящий момент электродвигателя 58 таким образом, чтобы получить определенное контактное усилие на зарядных контактах 47 и 48. Линейный привод 57 в свою очередь содержит ходовой винт с трапециевидной резьбой, который не показан на фигурах, расположен в данном случае в корпусе 59 линейного привода 57 и воздействует на приводную тягу 60 посредством гайки. Таким образом, в результате перемещения приводной тяги 60 шарнирно-сочлененную консоль можно перемещать в контактное положение 55 или втянутое положение 56.
Устройство 44 позиционирования также содержит датчик 63 сенсорного устройства 64, причем датчик 63 закреплен на однорычажной системе 52 вблизи зарядных контактов 47. В частности, на фиг. 3 показаны устройство 44 позиционирования и однорычажная система 52 в рабочем положении 55. Рабочее положение 55 находится настолько далеко от контактного положения 65, что зарядные контакты 47 и 48 еще находятся на относительном расстоянии А от не показанной здесь поверхности зарядного контакта. Поверхность зарядного контакта обозначена линией 66, а рабочее положение - расположенной параллельно ей линией 67. Поверхность зарядного контакта находится в области 68 обнаружения датчика 63, так что скорость зарядных контактов 47 и 48 во время движения от втянутого положения 56 в контактное положение 65 может регулироваться регулирующим устройством в зависимости от относительного расстояния А между зарядными контактами 47 и 48 и поверхностью зарядного контакта или линией 66.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ПОЗИЦИОНИРОВАНИЯ И СПОСОБ ОБРАЗОВАНИЯ КОНТАКТА | 2017 |
|
RU2732497C2 |
| БЛОК ПОЗИЦИОНИРОВАНИЯ ДЛЯ ЗАРЯДНОЙ СТАНЦИИ И СПОСОБ КОНТАКТИРОВАНИЯ | 2019 |
|
RU2798794C1 |
| ПОЗИЦИОНИРУЮЩИЙ БЛОК И СПОСОБ КОНТАКТИРОВАНИЯ | 2019 |
|
RU2798890C1 |
| ПРИЦЕПНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2018 |
|
RU2770048C2 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ЖЕЛЕЗНОДОРОЖНЫХ ВАГОНОВ | 2010 |
|
RU2442711C1 |
| Перегружатель ленточный раздвижной | 2023 |
|
RU2814534C1 |
| Способ оснащения воздушных судов авиационными средствами поражения | 2022 |
|
RU2808134C1 |
| КОНТАКТНЫЙ БЛОК ДЛЯ ЗАРЯДНОЙ СТАНЦИИ И СПОСОБ ОБРАЗОВАНИЯ КОНТАКТА | 2018 |
|
RU2749365C2 |
| УСТРОЙСТВО ДЛЯ ЗАРЯДКИ БАТАРЕИ И СПОСОБ ЗАРЯДКИ, РЕАЛИЗУЮЩИЙ РАБОТУ ТАКОГО УСТРОЙСТВА | 2017 |
|
RU2692767C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ДВИГАТЕЛЬ ДЛЯ ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА | 2014 |
|
RU2662877C2 |

Группа изобретений относится к устройству позиционирования (УП) и способу образования электропроводящего соединения между стационарной зарядной станцией и транспортным средством, в частности электробусом или аналогичным ТС. УП выполнено с возможностью перемещения электрического зарядного контакта относительно поверхности зарядного контакта и установления контакта между ними. УП содержит: шарнирно-сочлененную консоль (ШСК) и приводное устройство (ПУ) для привода ШСК. ШСК выполнена с возможностью перемещения зарядного контакта между контактным и втянутым положением. ПУ содержит привод перемещения (ПП) для создания перестановочного усилия, действующего на шарнирно-сочлененную консоль. ПУ содержит регулирующее устройство (РУ) и сенсорное устройство (СУ). РУ выполнено с возможностью управления приводом перемещения. СУ выполнено с возможностью обнаружения поверхности зарядного контакта или зарядного контакта. СУ соединено с РУ. РУ выполнено с возможностью регулирования скорости зарядного контакта во время его движения от втянутого положения к контактному положению в зависимости от относительного расстояния между зарядным контактом и поверхностью зарядного контакта. ПП выполнен с возможностью создания контактного усилия, действующего на поверхность зарядного контакта. ПП содержит регулирующее устройство и электродвигатель, выполненный с возможностью управления посредством регулирующего устройства. Достигается создание устройства, обеспечивающего регулировку скорости перемещения контактного устройства. 2 н. и 18 з.п. ф-лы, 6 ил.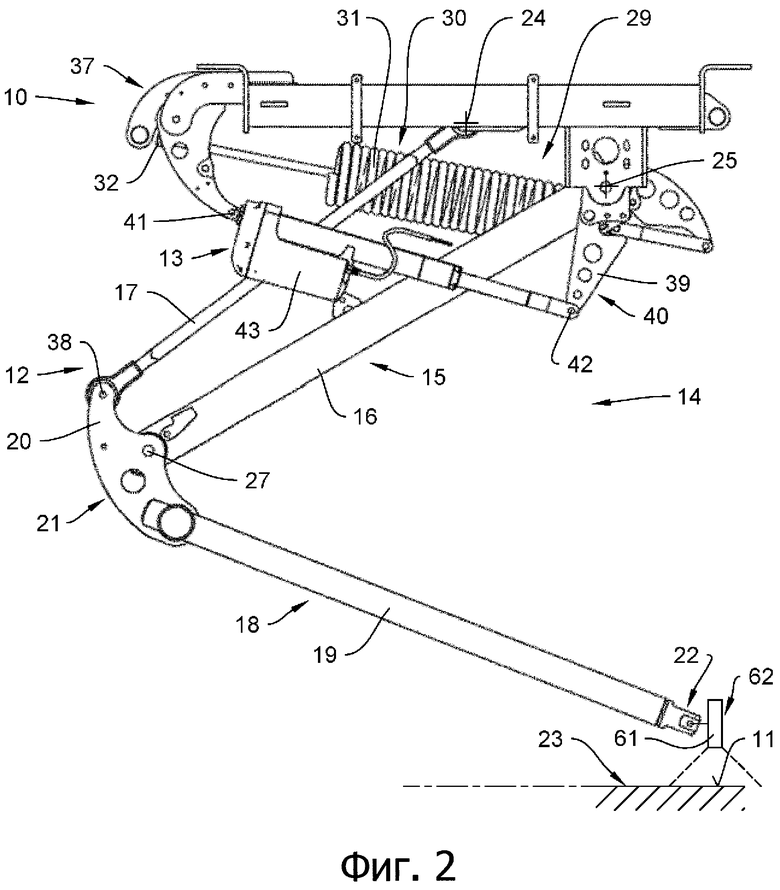
1. Устройство (10, 44) позиционирования для образования электропроводящего соединения между стационарной зарядной станцией и транспортным средством, в частности электробусом или аналогичным транспортным средством, выполненное с возможностью перемещения электрического зарядного контакта (47, 48) устройства позиционирования относительно поверхности (11) зарядного контакта и установления контакта между ними, причем устройство позиционирования содержит шарнирно-сочлененную консоль (12, 45) и приводное устройство для привода шарнирно-сочлененной консоли, причем шарнирно-сочлененная консоль выполнена с возможностью перемещения зарядного контакта между контактным положением (37, 65) для передачи тока и втянутым положением (36, 56) для прерывания передачи тока, причем приводное устройство содержит привод (13, 49) перемещения для создания перестановочного усилия, действующего на шарнирно-сочлененную консоль, причем приводное устройство содержит регулирующее устройство, выполненное с возможностью управления приводом перемещения, отличающееся тем, что приводное устройство содержит сенсорное устройство (62, 64), выполненное с возможностью обнаружения поверхности зарядного контакта или зарядного контакта, причем сенсорное устройство соединено с регулирующим устройством, причем регулирующее устройство выполнено с возможностью регулирования скорости зарядного контакта во время его движения от втянутого положения к контактному положению в зависимости от относительного расстояния (А) между зарядным контактом и поверхностью зарядного контакта, привод (13, 49) перемещения выполнен с возможностью создания контактного усилия, действующего на поверхность (11) зарядного контакта, причем привод перемещения содержит регулирующее устройство и электродвигатель (43, 58), выполненный с возможностью управления посредством регулирующего устройства.
2. Устройство позиционирования по п. 1, отличающееся тем, что привод (13, 49) перемещения представляет собой линейный привод (28, 57), предпочтительно привод ходовым винтом, особенно предпочтительно привод ходовым винтом без автоматического торможения.
3. Устройство позиционирования по одному из предыдущих пунктов, отличающееся тем, что сенсорное устройство содержит по меньшей мере один датчик (61, 63), причем датчик представляет собой механический переключатель, индуктивный датчик, емкостный датчик, магнитный датчик, ультразвуковой датчик, радиолокационный датчик и/или оптический датчик.
4. Устройство позиционирования по п. 3, отличающееся тем, что датчик (61, 63) расположен на шарнирно-сочлененной консоли (12, 45), в частности вблизи зарядного контакта (47, 48), или на поверхности (11) зарядного контакта.
5. Устройство позиционирования по одному из предыдущих пунктов, отличающееся тем, что привод (13, 49) перемещения и/или шарнирно-сочлененная консоль (12, 45) содержит датчик перемещения и/или датчик положения.
6. Устройство позиционирования по одному из предыдущих пунктов, отличающееся тем, что приводное устройство содержит пружинное устройство (29, 50), механически взаимодействующее с приводом перемещения.
7. Устройство позиционирования по п. 6, отличающееся тем, что устройство (10) позиционирования содержит удерживающее устройство (26) для крепления устройства позиционирования над транспортным средством на мачте или путепроводе, причем пружинное устройство (29) содержит по меньшей мере одну возвратную пружину (30) для создания возвратного усилия, действующего на шарнирно-сочлененную консоль (12), причем возвратное усилие больше силы тяжести шарнирно-сочлененной консоли, противодействующей возвратной пружине.
8. Устройство позиционирования по п. 6, отличающееся тем, что устройство (44) позиционирования содержит удерживающее устройство (51) для крепления устройства позиционирования на крыше транспортного средства, причем пружинное устройство (50) содержит по меньшей мере одну подъемную пружину (54) для создания подъемного усилия, действующего на шарнирно-сочлененную консоль (45), причем подъемное усилие меньше силы тяжести шарнирно-сочлененной консоли, противодействующей подъемной пружине.
9. Устройство позиционирования по одному из предыдущих пунктов, отличающееся тем, что приводное устройство выполнено с возможностью соединения с информационной шиной транспортного средства.
10. Способ образования электропроводящего соединения между стационарной зарядной станцией и транспортным средством, в частности электробусом или аналогичным транспортным средством, в котором посредством устройства (10, 44) позиционирования перемещают его электрический зарядный контакт (47, 48) относительно поверхности (11) зарядного контакта и образуют контакт между ними, причем шарнирно-сочлененную консоль (12, 45) устройства позиционирования приводят в движение посредством приводного устройства устройства позиционирования, причем зарядный контакт посредством шарнирно-сочлененной консоли позиционируют между контактным положением (37, 65) для передачи тока и втянутым положением (36, 56) для прекращения передачи тока, причем посредством привода (13, 49) перемещения приводного устройства создают перестановочное усилие, действующее на шарнирно-сочлененную консоль, причем посредством регулирующего устройства приводного устройства управляют приводом перемещения, отличающийся тем, что посредством сенсорного устройства (62, 64) приводного устройства обнаруживают поверхность зарядного контакта или зарядный контакт, причем сенсорное устройство соединено с регулирующим устройством, причем скорость зарядного контакта во время его движения от втянутого положения к контактному положению регулируют посредством регулирующего устройства в зависимости от относительного расстояния (А) между зарядным контактом и поверхностью зарядного контакта, посредством привода (13, 49) перемещения прикладывают контактное усилие к поверхности (11) зарядного контакта, причем электродвигателем (43, 58) привода перемещения управляют посредством регулирующего устройства.
11. Способ по п. 10, отличающийся тем, что во время движения от втянутого положения (36, 56) к контактному положению зарядному контакту (47, 48) придают сначала положительное, а потом отрицательное ускорение.
12. Способ по п. 10 или 11, отличающийся тем, что во время движения зарядного контакта (47, 48) от втянутого положения (36, 56) к контактному положению (37, 65) зарядный контакт (47, 48) на первом отрезке движения перемещают с постоянной и/или максимальной скоростью, а на втором отрезке движения до достижения контактного положения – с относительно сниженной скоростью.
13. Способ по п. 12, отличающийся тем, что постоянная или максимальная скорость составляет не менее 100 мм/с, предпочтительно не менее 360 мм/с, особенно предпочтительно не менее 500 мм/с.
14. Способ по п. 12 или 13, отличающийся тем, что сниженная скорость при достижении контактной позиции составляет по меньшей мере 70%, предпочтительно 50%, особенно предпочтительно 30%, постоянной и/или максимальной скорости или 0 мм/с.
15. Способ по одному из пп. 10-14, отличающийся тем, что скорость снижают перед достижением контактного положения (37, 65) при относительном расстоянии (А), составляющем не более 150 мм, предпочтительно не более 100 мм, особенно предпочтительно не более 50 мм.
16. Способ по одному из пп. 10-15, отличающийся тем, что скорость снижают перед достижением контактного положения (37, 65) в соответствии с линейной функцией или приближенной функцией.
17. Способ по одному из пп. 10-16, отличающийся тем, что посредством по меньшей мере одного датчика (61, 63) сенсорного устройства (62, 64) непрерывно передают значение расстояния или определенное пороговое значение относительного расстояния (А) регулирующему устройству.
18. Способ по п. 10, отличающийся тем, что посредством регулирующего устройства регистрируют крутящий момент электродвигателя (43, 58), причем посредством регулирующего устройства регулируют контактное усилие в зависимости от крутящего момента электродвигателя.
19. Способ по одному из пп. 10-18, отличающийся тем, что посредством дополнительного сенсорного устройства приводного устройства обнаруживают зарядную станцию или транспортное средство, причем посредством регулирующего устройства определяют относительное расстояние до зарядного контакта (47, 48) во втянутом положении и в контактном положении (37, 65), причем посредством регулирующего устройства перед остановкой транспортного средства у зарядной станции инициируют движение зарядного контакта из втянутого положения.
20. Способ по п. 19, отличающийся тем, что посредством регулирующего устройства определяют относительную высоту зарядного контакта (47, 48) и/или контактного положения (37, 65) над дорогой, причем посредством регулирующего устройства определяют высоту транспортного средства над дорогой.
| CN 101531141 A, 16.09.2009 | |||
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| DE 102010027670 A1, 26.01.2012 | |||
| Колосоуборка | 1923 |
|
SU2009A1 |
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |

