Изобретение относится к радиолокации, в частности к способам комплексирования бортовой радиолокационной станции пилотируемого летательного аппарата и бортовых радиолокационных станций беспилотных летательных аппаратов при определении времени задержки на срабатывание полезной нагрузки беспилотных летательных аппаратов, и может быть использовано для эффективного использования полезной нагрузки беспилотных летательных аппаратов.
Известен способ определения эффективной площади рассеяния воздушного объекта бортовой радиолокационной станцией [1], заключающийся в том, что облучают зондирующим сигналом воздушный объект, принимают отраженный сигнал, измеряют мощность излучаемого сигнала и дальность до воздушного объекта, измеряют значение угла горизонтального ракурса воздушного объекта, измеряют амплитуду принятого сигнала, сравнивают амплитуду принятого сигнала с заранее заданным порогом, при превышении амплитудой принятого сигнала заранее заданного порога записывают в запоминающее устройство измеренные значения мощности излучаемого сигнала, дальности до воздушного объекта, угла горизонтального ракурса воздушного объекта, амплитуды принятого сигнала, повторяют указанные выше операции до накопления в запоминающем устройстве массива, состоящего не менее чем из пяти измеренных значений мощности излученного сигнала, дальности до воздушного объекта, угла горизонтального ракурса воздушного объекта и амплитуды принятого сигнала, рассчитывают массив значений эффективной площади рассеяния воздушного объекта σ для каждого из запомненных измерений по формуле
 ,
,
где А - амплитуда сигнала;
D - дальность до воздушного объекта;
Pi - выходная мощность передатчика БРЛС;
К - коэффициент, зависящий от параметров бортовой радиолокационной станции;
n - номер измерения,
используя полученный массив значений эффективной площади рассеяния воздушного объекта σ и измеренный с ними массив значений угла горизонтального ракурса воздушного объекта ϕ, находят минимальное и максимальное значения углов горизонтального ракурса ϕmin и ϕmax, определяют диапазон изменения угла горизонтального ракурса Δϕ=[ϕmin, ϕmax], затем определяют среднее значение эффективной площади рассеяния воздушного объекта в измеренном диапазоне углов горизонтального ракурса Δϕ, после чего на основании полученного значения эффективной поверхности рассеяния проводят классификацию цели по заранее заданным критериям отнесения воздушного объекта к классам размерности «большая», «средняя», «малая».
Недостатком данного способа является недостаточная точность определения эффективной площади рассеяния для классификации воздушного объекта по критерию «большая», «средняя», «малая», поскольку эффективная площадь рассеяния летательного аппарата сложной геометрической формы представляет собой сильно флюктуирующую величину в зависимости от угла горизонтального ракурса, под которым наблюдается летательный аппарат. Кроме того, недостаточная точность определения эффективной площади рассеяния воздушного объекта не позволяет точно определить необходимое время задержки на срабатывание полезной нагрузки беспилотных летательных аппаратов, взаимодействующих с данным воздушным объектом.
Технической задачей изобретения является повышение точности измерения эффективной площади рассеяния воздушного объекта в полете, а также точности определения времени задержки на срабатывание полезной нагрузки беспилотных летательных аппаратов, взаимодействующих с данным воздушным объектом.
Поставленная задача с достижением технического результата достигается тем, что в способе комплексирования бортовой радиолокационной станции пилотируемого летательного аппарата и бортовых радиолокационных станций беспилотных летательных аппаратов при определении времени задержки на срабатывание полезной нагрузки беспилотных летательных аппаратов, заключающемся в том, что облучают зондирующим сигналом воздушный объект, принимают отраженный сигнал, измеряют мощность излучаемого сигнала и дальность до воздушного объекта, измеряют значение угла горизонтального ракурса воздушного объекта, измеряют амплитуду принятого сигнала, сравнивают амплитуду принятого сигнала с заранее заданным порогом, при превышении амплитудой принятого сигнала заранее заданного порога записывают в запоминающее устройство измеренные значения мощности излучаемого сигнала, дальности до воздушного объекта, угла горизонтального ракурса воздушного объекта, амплитуды принятого сигнала, повторяют указанные выше операции до накопления в запоминающем устройстве массива, состоящего не менее чем из пяти измеренных значений мощности излученного сигнала, дальности до воздушного объекта, угла горизонтального ракурса воздушного объекта и амплитуды принятого сигнала, рассчитывают массив значений эффективной площади рассеяния воздушного объекта σ для каждого из запомненных измерений по формуле
,
где А - амплитуда сигнала;
D - дальность до воздушного объекта;
Pi - выходная мощность передатчика БРЛС;
К - коэффициент, зависящий от параметров бортовой радиолокационной станции;
n - номер измерения,
используя полученный массив значений эффективной площади рассеяния воздушного объекта σ и измеренный с ними массив значений угла горизонтального ракурса воздушного объекта ϕ, находят минимальное и максимальное значения углов горизонтального ракурса ϕmin и ϕmax, определяют диапазон изменения угла горизонтального ракурса Δϕ=[ϕmin, ϕmax], затем определяют среднее значение эффективной площади рассеяния воздушного объекта в измеренном диапазоне углов горизонтального ракурса Δϕ, после чего на основании полученного значения эффективной поверхности рассеяния проводят классификацию цели по заранее заданным критериям отнесения воздушного объекта к классам размерности «большая», «средняя», «малая», дополнительно на борту каждого из беспилотных летательных аппаратов рассчитывают посредством бортовой РЛС БЛА по аналогии с пилотируемым ЛА массив значений эффективной площади рассеяния воздушного объекта σ и измеренный с ними массив значений угла горизонтального ракурса воздушного объекта ϕ, находят минимальное и максимальное значения углов горизонтального ракурса ϕmin и ϕmax, определяют диапазон изменения угла горизонтального ракурса Δϕ=[ϕmin, ϕmax], определяют среднее значение эффективной площади рассеяния воздушного объекта в измеренном диапазоне углов горизонтального ракурса Δϕ, передают результаты вычислений по каналам радиокоррекции (радиосвязи) на борт пилотируемого летательного аппарата, где как определенное в бортовой радиолокационной станции пилотируемого летательного аппарата среднее значение эффективной площади рассеяния воздушного объекта, так и сформированные и переданные беспилотными летательными аппаратами средние значения эффективной площади рассеяния воздушного объекта, поступают на вход многоканального вычислителя (фильтра), на выходе которого формируется уточненное среднее значение (оценка) эффективной площади рассеяния воздушного объекта σ с учетом ракурсов воздушного объекта по отношению к БПЛА, на основании полученного уточненного значения эффективной поверхности рассеяния σ проводят уточненную классификацию воздушного объекта по заранее заданным критериям отнесения объекта к классам размерности «большая», «средняя», «малая», результат классификации объекта по каналу радиокоррекции (радиосвязи) передают на борт беспилотных летательных аппаратов, используют текущее значение горизонтального ракурса воздушного объекта ϕ и уточненное значение размерности воздушного объекта L n(«большая», «средняя», «малая») для вычисления на борту беспилотных летательных аппаратов уточненного значения времени задержки для срабатывания их полезной нагрузки.
Новыми признаками, обладающими существенными отличиями по способу, является следующая совокупность действий:
1. На борту каждого из беспилотных летательных аппаратов рассчитывают массив значений эффективной площади рассеяния воздушного объекта σ и измеренный с ними массив значений угла горизонтального ракурса воздушного объекта ϕ, находят минимальное и максимальное значения углов горизонтального ракурса ϕmin и ϕmax, определяют диапазон изменения угла горизонтального ракурса Δϕ=[ϕmin, ϕmax], затем определяют среднее значение эффективной площади рассеяния воздушного объекта в измеренном диапазоне углов горизонтального ракурса Δϕ.
2. Передают результаты вычислений по каналам радиокоррекции на борт пилотируемого летательного аппарата где как определенное в бортовой радиолокационной станции пилотируемого летательного аппарата среднее значение эффективной площади рассеяния воздушного объекта, так и сформированные и переданные беспилотными летательными аппаратами средние значения эффективной площади рассеяния воздушного объекта, поступают на вход многоканального вычислителя (фильтра) на выходе которого формируется уточненное среднее значение эффективной площади рассеяния воздушного объекта σ.
3. На основании полученного уточненного значения эффективной поверхности рассеяния σ проводят классификацию воздушного объекта по заранее заданным критериям отнесения объекта к классам размерности «большая», «средняя», «малая».
4. Результат классификации объекта по каналу радиокоррекции передают на борт беспилотных летательных аппаратов
5. Используют текущее значение горизонтального ракурса воздушного объекта ϕ и уточненное значение размерности воздушного объекта L («большая», «средняя», «малая») для вычисления на борту беспилотных летательных аппаратов значения времени задержки для срабатывание их полезной нагрузки.
Данные признаки являются существенными и в известных технических решениях не обнаружены.
Применение всех новых существенных признаков позволит повысить точность измерения эффективной площади рассеяния воздушного объекта в полете, а также точность определения времени задержки на срабатывание полезной нагрузки беспилотных летательных аппаратов, взаимодействующих с данным воздушным объектом.
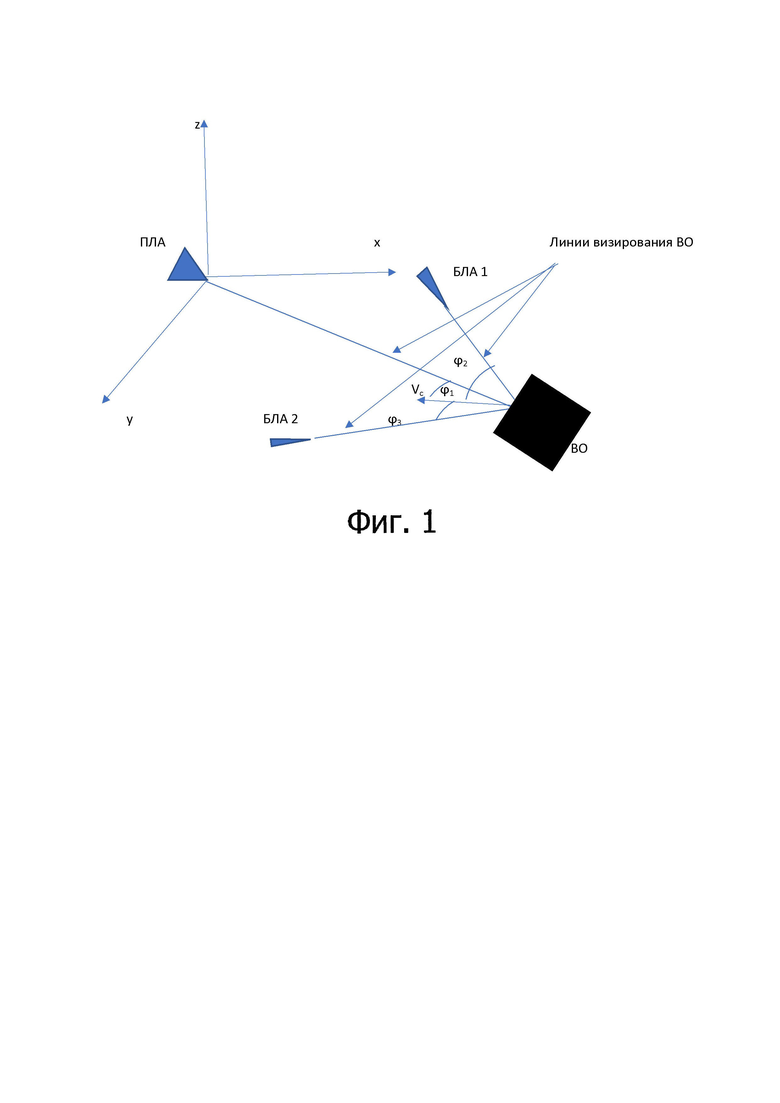
На фиг.1 схематично представлена схема облучения воздушного объекта (ВО) бортовой радиолокационной станцией пилотируемого летательного аппарата (ПЛА) и бортовыми радиолокационными станциями беспилотных летательных аппаратов (БЛА1, БЛА2), где Vc - вектор скорости ВО (цели), ϕ1, ϕ2, ϕ3 - углы горизонтального ракурса ВО.
Способ комплексирования бортовой радиолокационной станции пилотируемого летательного аппарата и бортовых радиолокационных станций беспилотных летательных аппаратов при определении времени задержки на срабатывание полезной нагрузки беспилотных летательных аппаратов осуществляется следующим образом. Порядок измерения эффективной площади рассеяния воздушного объекта рассмотрим на примере бортовой радиолокационной станции (БРЛС), установленной на самолете-носителе, и воздушного объекта (цели). Пример выполнения такой радиолокационной станции приведен в работе [2]. Бортовая радиолокационная станция (БРЛС) в штатном режиме осуществляет обзор воздушного пространства для обнаружения целей. После обнаружения цели в БРЛС запускается режим измерения эффективной площади рассеяния. БРЛС облучает цель зондирующим сигналом, мощность которого измеряется и заносится в ее запоминающее устройство (ЗУ), входящее в состав вычислительной системы БРЛС. БРЛС принимает отраженный от цели сигнал и измеряет дальность до цели, амплитуду принятого сигнала и горизонтальный ракурс цели. Дальность может быть измерена различными способами, например, по задержке принятого сигнала. Амплитуда сигнала измеряется приемным устройством, а горизонтальный ракурс (угол между направлением излучения на цель и вектором скорости цели) по навигационным данным самолета, на котором установлена БРЛС, и направлению прихода отраженного от цели сигнала.
Амплитуду принятого сигнала сравнивают с заранее заданным порогом и в случае превышения порога измеренные параметры заносятся в ЗУ. В противном случае измерение считается недостоверным и измеренные значения не записываются в ЗУ, чтобы не вносить погрешность в дальнейший расчет эффективной площади рассеяния.
Облучение цели зондирующим сигналом проводят до тех пор, пока не сформируют массив размерностью N не менее пяти. Параметр N определяется временем наблюдения цели и лежит в диапазоне значений от 5 и выше.
После завершения формирования N-мерного массива параметров определяют М значений эффективной площади рассеяния σ(n), где n=1,2…М, по основному уравнению радиолокации
 ,
,
где А - амплитуда принятого сигнала;
D - дальность до объекта;
Pi - мощность излучаемого сигнала БРЛС;
K - коэффициент, зависящий от параметров бортовой радиолокационной станции.
Коэффициент K определяется коэффициентом направленного действия антенны, коэффициентом шума приемника, загрублением аттенюаторов приемника и другими параметрами БРЛС. Используя полученный массив значений эффективной площади рассеяния воздушного объекта σ и измеренный с ними массив значений угла ракурса воздушного объекта ϕ, находят минимальное и максимальное значения углов ракурса полезной нагрузки min и ϕmax, определяют диапазон изменения угла горизонтального ракурса Δϕ=[ϕmin, ϕmax]. Далее определяют среднее значение эффективной площади рассеяния воздушного объекта в измеренном диапазоне углов горизонтального ракурса Δϕ по формуле  . Одновременно, бортовыми станциями беспилотных летательных аппаратов по приведенной выше методике определяют среднее значение эффективной площади рассеяния воздушного объекта в измеренном диапазоне углов горизонтального ракурса Δϕ (для конкретного беспилотного летательного аппарата Δϕ может иметь свое значение). Полученные на борту каждого беспилотного летательного аппарата средние значения эффективной площади рассеяния воздушного объекта по каналу радиокоррекции (радиосвязи) передают на борт пилотируемого летательного аппарата где как определенное в бортовой радиолокационной станции пилотируемого летательного аппарата среднее значение эффективной площади рассеяния воздушного объекта, так и сформированные и переданные беспилотными летательными аппаратами средние значения эффективной площади рассеяния воздушного объекта, поступают на вход многоканального вычислителя (фильтра) на выходе которого формируется уточненное среднее значение эффективной площади рассеяния воздушного объекта σ, на основании полученного уточненного значения эффективной поверхности рассеяния σ проводят классификацию воздушного объекта по заранее заданным критериям отнесения объекта к классам размерности «большая», «средняя», «малая», результат классификации объекта по каналу радиокоррекции (радиосвязи) передают на борт беспилотных летательных аппаратов, используют текущее значение горизонтального ракурса воздушного объекта ϕ и уточненное значение размерности воздушного объекта («большая», «средняя», «малая») для вычисления на борту беспилотных летательных аппаратов уточненного значения времени задержки для срабатывания их полезной нагрузки.
. Одновременно, бортовыми станциями беспилотных летательных аппаратов по приведенной выше методике определяют среднее значение эффективной площади рассеяния воздушного объекта в измеренном диапазоне углов горизонтального ракурса Δϕ (для конкретного беспилотного летательного аппарата Δϕ может иметь свое значение). Полученные на борту каждого беспилотного летательного аппарата средние значения эффективной площади рассеяния воздушного объекта по каналу радиокоррекции (радиосвязи) передают на борт пилотируемого летательного аппарата где как определенное в бортовой радиолокационной станции пилотируемого летательного аппарата среднее значение эффективной площади рассеяния воздушного объекта, так и сформированные и переданные беспилотными летательными аппаратами средние значения эффективной площади рассеяния воздушного объекта, поступают на вход многоканального вычислителя (фильтра) на выходе которого формируется уточненное среднее значение эффективной площади рассеяния воздушного объекта σ, на основании полученного уточненного значения эффективной поверхности рассеяния σ проводят классификацию воздушного объекта по заранее заданным критериям отнесения объекта к классам размерности «большая», «средняя», «малая», результат классификации объекта по каналу радиокоррекции (радиосвязи) передают на борт беспилотных летательных аппаратов, используют текущее значение горизонтального ракурса воздушного объекта ϕ и уточненное значение размерности воздушного объекта («большая», «средняя», «малая») для вычисления на борту беспилотных летательных аппаратов уточненного значения времени задержки для срабатывания их полезной нагрузки.
Уточненное значение времени задержки для срабатывания полезной нагрузки БЛА, обеспечивающее оптимальное для текущих условий сближения БЛА с воздушным объектом (r, ϑ1ц) положение точки срабатывания исполнительного механизма полезной нагрузки определяется в соответствии с выражением [3]:
 ,
,
где r - промах БЛА относительно воздушного объекта,  - среднее направление разлета элементов полезной нагрузки в динамике, ϑ0 – начальная скорость разлета элементов полезной нагрузки, ϑ1ц - относительная скорость сближения БЛА с воздушным объектом, L - линейный размер воздушного объекта («большой», «средний», «малый»), ϕ – текущий горизонтальный ракурс воздушного объекта.
- среднее направление разлета элементов полезной нагрузки в динамике, ϑ0 – начальная скорость разлета элементов полезной нагрузки, ϑ1ц - относительная скорость сближения БЛА с воздушным объектом, L - линейный размер воздушного объекта («большой», «средний», «малый»), ϕ – текущий горизонтальный ракурс воздушного объекта.
Среднее направление разлета элементов полезной нагрузки в динамике определяется в соответствии с выражением:
 ,
,
где  - среднее направление разлета элементов в статике; φ0 – угол наклона диаграммы направленности РЛС БЛА.
- среднее направление разлета элементов в статике; φ0 – угол наклона диаграммы направленности РЛС БЛА.
Таким образом, предлагаемое техническое решение позволяет повысить точность измерения эффективной площади рассеяния воздушного объекта в полете, а также точность определения времени задержки на срабатывание полезной нагрузки беспилотных летательных аппаратов, взаимодействующих с данным воздушным объектом.
Источники информации
1. Бекирбаев Т. О., Леонов Ю. И., Трушанов А. А., Балюра А. П.,
Евдокимов Г. И. Способ определения эффективной площади рассеяния воздушных объектов бортовой радиолокационной станцией Патент РФ на изобретение № 2626018, 2017.
2. Радиолокационные системы многофункциональных самолетов. Т.1. РЛС - информационная основа боевых действий многофункциональных самолетов. Системы и алгоритмы первичной обработки радиолокационных сигналов. / Под ред. А.И. Канащенкова и В.И. Меркулова. - М.: «Радиотехника», 2006, с. 126.
3. Ефанов В.В., Мужичек С. М., Гаврилов Н.В., Марухин А. С., Махно И. В. Способ управления характеристиками поля поражения осколочно-фугасной боевой части ракеты и устройство для его осуществления. Патент РФ на изобретение № 2484419, 2013.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения эффективной площади рассеяния воздушных объектов бортовой радиолокационной станцией | 2016 |
|
RU2626018C1 |
| Радиолокационный способ обнаружения беспилотных летательных аппаратов | 2023 |
|
RU2821381C1 |
| Радиолокационный способ обнаружения беспилотных летательных аппаратов | 2022 |
|
RU2799866C1 |
| Способ определения угла сноса летательного аппарата бортовой радиолокационной станцией | 2017 |
|
RU2660159C1 |
| Радиолокационный способ обнаружения беспилотных летательных аппаратов | 2021 |
|
RU2760828C1 |
| Радиолокационная станция | 2016 |
|
RU2618521C1 |
| РАДИОЛОКАЦИОННЫЙ СПОСОБ ОБНАРУЖЕНИЯ МАЛОЗАМЕТНЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2013 |
|
RU2534217C1 |
| АЭРОМОБИЛЬНЫЙ КОМПЛЕКС С БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ВЕРТОЛЕТНОГО ТИПА | 2022 |
|
RU2792314C1 |
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО ОБНАРУЖЕНИЯ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2024 |
|
RU2833132C1 |
| Бортовая радиолокационная станция дистанционно управляемого летательного аппарата | 2017 |
|
RU2668995C1 |
Изобретение относится к радиолокации, в частности к способам комплексирования бортовой радиолокационной станции (РЛС) пилотируемого летательного аппарата (ЛА) и бортовых радиолокационных станций беспилотных летательных аппаратов (БЛА) при определении времени задержки на срабатывание полезной нагрузки беспилотных летательных аппаратов, и может быть использовано для эффективного использования полезной нагрузки беспилотных летательных аппаратов. Технический результат заключается в повышении точности измерения эффективной площади рассеяния воздушного объекта в полете, а также точности определения времени задержки на срабатывание полезной нагрузки беспилотных летательных аппаратов, взаимодействующих с данным воздушным объектом. В заявленном способе на борту каждого из беспилотных летательных аппаратов рассчитывают посредством бортовой РЛС БЛА по аналогии с пилотируемым ЛА массив значений эффективной площади рассеяния воздушного объекта σ и измеренный с ними массив значений угла горизонтального ракурса воздушного объекта ϕ, находят минимальное и максимальное значения углов горизонтального ракурса ϕmin и ϕmax, определяют диапазон изменения угла горизонтального ракурса Δϕ=[ϕmin, ϕmax], затем определяют среднее значение эффективной площади рассеяния воздушного объекта в измеренном диапазоне углов горизонтального ракурса Δϕ, передают результаты вычислений по каналам радиокоррекции (радиосвязи) на борт пилотируемого летательного аппарата, где как определенное в бортовой радиолокационной станции пилотируемого летательного аппарата среднее значение эффективной площади рассеяния воздушного объекта, так и сформированные и переданные беспилотными летательными аппаратами средние значения эффективной площади рассеяния воздушного объекта поступают на вход многоканального вычислителя (фильтра), на выходе которого формируется уточненное среднее значение (оценка) эффективной площади рассеяния воздушного объекта σ, уточненное среднее значение эффективной площади рассеяния воздушного объекта σ передают на борт беспилотных летательных аппаратов, используют текущее значение горизонтального ракурса воздушного объекта ϕ и уточненное значение размерности воздушного объекта («большая», «средняя», «малая») для вычисления на борту беспилотных летательных аппаратов значения времени задержки для срабатывание их полезной нагрузки. 1 ил.
Способ комплексирования бортовой радиолокационной станции пилотируемого летательного аппарата и бортовых радиолокационных станций беспилотных летательных аппаратов при определении времени задержки на срабатывание полезной нагрузки беспилотных летательных аппаратов, заключающийся в том, что облучают зондирующим сигналом воздушный объект, принимают отраженный сигнал, измеряют мощность излучаемого сигнала и дальность до воздушного объекта, измеряют значение угла горизонтального ракурса воздушного объекта, измеряют амплитуду принятого сигнала, сравнивают амплитуду принятого сигнала с заранее заданным порогом, при превышении амплитудой принятого сигнала заранее заданного порога записывают в запоминающее устройство измеренные значения мощности излучаемого сигнала, дальности до воздушного объекта, угла горизонтального ракурса воздушного объекта, амплитуды принятого сигнала, повторяют указанные выше операции до накопления в запоминающем устройстве массива, состоящего не менее чем из пяти измеренных значений мощности излученного сигнала, дальности до воздушного объекта, угла горизонтального ракурса воздушного объекта и амплитуды принятого сигнала, рассчитывают массив значений эффективной площади рассеяния воздушного объекта σ для каждого из запомненных измерений по формуле
 ,
,
где А - амплитуда сигнала;
D - дальность до воздушного объекта;
Pi - выходная мощность передатчика БРЛС;
K - коэффициент, зависящий от параметров бортовой радиолокационной станции;
n - номер измерения,
используя полученный массив значений эффективной площади рассеяния воздушного объекта σ и измеренный с ними массив значений угла горизонтального ракурса воздушного объекта ϕ, находят минимальное и максимальное значения углов горизонтального ракурса ϕmin и ϕmax, определяют диапазон изменения угла горизонтального ракурса Δϕ=[ϕmin, ϕmax], затем определяют среднее значение эффективной площади рассеяния воздушного объекта в измеренном диапазоне углов горизонтального ракурса Δϕ, после чего на основании полученного значения эффективной поверхности рассеяния проводят классификацию цели по заранее заданным критериям отнесения воздушного объекта к классам размерности «большая», «средняя», «малая», отличающийся тем, что дополнительно на борту каждого из беспилотных летательных аппаратов рассчитывают посредством бортовой РЛС БЛА по аналогии с пилотируемым ЛА массив значений эффективной площади рассеяния воздушного объекта σ и измеренный с ними массив значений угла горизонтального ракурса воздушного объекта ϕ, находят минимальное и максимальное значения углов горизонтального ракурса ϕmin и ϕmax, определяют диапазон изменения угла горизонтального ракурса Δϕ=[ϕmin, ϕmax], затем определяют среднее значение эффективной площади рассеяния воздушного объекта в измеренном диапазоне углов горизонтального ракурса Δϕ, передают результаты вычислений по каналам радиокоррекции (радиосвязи) на борт пилотируемого летательного аппарата, где как определенное в бортовой радиолокационной станции пилотируемого летательного аппарата среднее значение эффективной площади рассеяния воздушного объекта, так и сформированные и переданные беспилотными летательными аппаратами средние значения эффективной площади рассеяния воздушного объекта поступают на вход многоканального вычислителя (фильтра), на выходе которого формируется уточненное среднее значение (оценка) эффективной площади рассеяния воздушного объекта σ, уточненное среднее значение эффективной площади рассеяния воздушного объекта σ передают на борт беспилотных летательных аппаратов, используют текущее значение горизонтального ракурса воздушного объекта ϕ и уточненное значение размерности воздушного объекта («большая», «средняя», «малая») для вычисления на борту беспилотных летательных аппаратов значения времени задержки на срабатывание их полезной нагрузки.

