ОБЛАСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к области определения веса по осадке судов и в частности, но не исключительно, к системам и способам осуществления автоматизированного определения веса судов с помощью оптических измерений и измерений осадки пришвартованного у причала судна на основе GPS/GNSS.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
Осадка судна является расстоянием от ватерлинии до днища корпуса. Во время загрузки и разгрузки судна важно контролировать осадку судна для обеспечения того, чтобы оно не было перегруженным или неустойчивым и чтобы оно имело достаточный зазор для портов, в которое оно должно войти или из которых должно выйти во время его следующего рейса.
Ручной контроль осадки судна во время загрузки и разгрузки является времязатратным и может требовать от персонала измерения осадки на океанской стороне судна изнутри лоцманского бота или схожего судна.
Загрузка сухогрузных судов и других грузовых судов может быть прервана на время осуществления определения веса по осадке судна. Это увеличивает время, требующееся для загрузки судна. Автоматизация определения веса по осадке судна направлена на устранение некоторых из этих проблем.
ИЗЛОЖЕНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Согласно первому аспекту настоящего изобретения предложен способ определения осадки судна, включающий этапы:
измерения осадки судна с использованием по меньшей мере одного устройства оптического формирования изображений для предоставления данных оптического измерения осадки;
измерения осадки судна с использованием данных о высоте, предоставленных по меньшей мере одним устройством GNSS или GPS, для предоставления данных высотного измерения осадки; и
использования данных высотного измерения осадки и данных оптического измерения осадки для определения осадки судна.
Способ может дополнительно включать использование данных высотного измерения осадки для подтверждения данных оптического измерения осадки, на основании которых в случае подтверждения определяют осадку судна.
Способ может включать этап захвата по меньшей мере одного оптического изображения марок осадки на корпусе судна с использованием по меньшей мере одного устройства оптического формирования изображений;
выполнения обработки оптического изображения посредством оптического распознавания знаков (OCR) для предоставления данных OCR; и
использования данных OCR при определении данных оптического измерения осадки.
Способ может включать этап измерения осадки судна с использованием по меньшей мере одного устройства оптического формирования изображений;
измерения расстояния между по меньшей мере одной точкой на корпусе судна и по меньшей мере одним устройством оптического формирования изображений; и
измерения относительного угла между первым и вторым положениями оптической оси устройства оптического формирования изображений, при этом первое положение является заданным положением, и второе положение является положением устройства оптического формирования изображений, когда измеряют расстояние между устройством оптического формирования изображений и по меньшей мере одной точкой на корпусе.
Способ может включать расположение по меньшей мере одного устройства оптического формирования изображений и по меньшей мере одного лазерного дальномерного устройства на поворотно-наклонной платформе; и
эксплуатацию лазерного дальномерного устройства для измерения расстояния между по меньшей мере одним устройством оптического формирования изображений и указанной по меньшей мере одной точкой на корпусе судна;
и использование поворотно-наклонной платформы для перемещения устройства оптического формирования изображений во второе положение, и использование указанной поворотно-наклонной платформы для измерения относительного угла между указанным первым положением и указанным вторым положением.
Первое положение устройства оптического формирования изображений может содержать оптическую ось устройства оптического формирования изображений, расположенную под углом, по существу перпендикулярным продольной оси причала, на котором или смежно с которым расположено устройство оптического формирования изображений; и
измерение относительного угла между указанным первым положением и указанным вторым положением может включать измерение относительного угла в горизонтальной плоскости и вертикальной плоскости.
Способ может включать использование измерений:
i) расстояния между устройством оптического формирования изображений и корпусом; и
ii) относительного угла между первым положением и вторым положением,
для создания набора данных из трехмерных данных расположения по меньшей мере одной точки на поверхности корпуса по меньшей мере вблизи от одного набора марок осадки.
Способ может включать использование:
i) измерений расстояния между устройством оптического формирования изображений и корпусом; и
ii) относительного угла между первым положением и вторым положением,
для определения ширины корпуса судна между соответствующими марками осадки на левой и правой сторонах корпуса судна.
Способ может включать этап выполнения преобразования по меньшей мере одного изображения, содержащего по меньшей мере один набор марок осадки; при этом при преобразовании используют относительный угол между вторым положением, в котором указанное изображение было захвачено устройством оптического формирования изображений, и указанным первым положением.
Способ может включать этапы:
получения по меньшей мере одного изображения, содержащего по меньшей мере один набор марок осадки;
коррекции указанного изображения на относительный угол между вторым положением, в котором указанное изображение было захвачено устройством оптического формирования изображений, и указанным первым положением для создания откорректированного изображения; и
выполнения оптического распознавания знаков в отношении указанного откорректированного изображения.
Способ может включать этап:
преобразования указанного изображения таким образом, чтобы казалось, будто корпус судна расположен в вертикальной плоскости, в результате чего все точки на корпусе судна кажутся равноудаленными от точки наблюдения устройства оптического формирования изображений.
Посредством способа можно преобразовывать изображение таким образом, чтобы казалось, будто оно было получено устройством оптического формирования изображений:
i) расположенным в точке наблюдения, которая:
a) перпендикулярна продольной оси причала, у которого поставлено указанное судно; и
b) находится на бесконечном расстоянии от корпуса судна, и
ii) работающим с бесконечным увеличением.
Способ может включать преобразование, выполняемое для преобразования изображения таким образом, чтобы казалось, будто все лучи света, которые образуют изображение, параллельны друг другу и перпендикулярны плоскости, в которой образуют изображение.
Лучи света могут быть параллельны как в горизонтальной, так и в вертикальной плоскостях.
Способ может включать преобразование, при котором дополнительно преобразовывают изображение таким образом, чтобы казалось, будто все точки на поверхности корпуса равноудалены от точки наблюдения.
Способ может включать измерение осадки судна с использованием данных о высоте, которое включает расположение по меньшей мере одного устройства GNSS или GPS на судне для измерения высоты судна и получения тем самым данных о высоте и использование данных о высоте для определения осадки судна.
Этап измерения осадки судна с использованием указанных данных о высоте может дополнительно включать измерение прилива для предоставления данных о приливе и использование данных о приливе и данных о высоте для определения осадки судна.
Способ может включать этапы:
размещения по меньшей мере двух устройств GNSS или GPS на указанном судне в положениях, смещенных в боковом направлении относительно продольной оси указанного судна;
измерения данных о высоте на указанных по меньшей мере двух устройствах GNSS или GSP; и
использования данных о высоте для определения угла крена судна и тем самым предоставления данных об угле крена.
Способ может включать этап использования данных об угле крена и оптических данных осадки для определения измерения осадки судна для океанской стороны судна.
По меньшей мере одно устройство оптического формирования изображений может быть расположено на причале, и указанный способ может дополнительно включать этап постановки указанного судна у указанного причала до определения указанного оптического измерения осадки и указанного измерения осадки по высоте.
По меньшей мере одно устройство оптического формирования изображений может быть расположено в фиксированном положении на указанном причале.
По меньшей мере два устройства оптического формирования изображений могут быть расположены на указанном причале в положениях, подходящих для измерения марок осадки на носу и корме судна.
Способ может включать этап выполнения нескольких измерений осадки судна во время загрузки или разгрузки судна для предоставления измерений осадки судна в режиме реального времени или почти в реальном времени.
Согласно второму аспекту настоящего изобретения предложена система определения осадки судна, при этом система содержит:
по меньшей мере одно устройство оптического формирования изображений, расположенное на причале, и по меньшей мере одно устройство GNSS или GPS;
при этом система выполнена с возможностью эксплуатации согласно этапам:
измерения осадки судна с использованием по меньшей мере одного устройства оптического формирования изображений для предоставления данных оптического измерения осадки;
измерения осадки судна с использованием данных о высоте, предоставленных по меньшей мере одним устройством GNSS или GPS, для предоставления данных высотного измерения осадки; и
использования данных высотного измерения осадки и данных оптического измерения осадки для определения осадки судна.
Система дополнительно может быть выполнена с возможностью использования данных высотного измерения осадки для подтверждения данных оптического измерения осадки, на основании которых в случае подтверждения определяют осадку судна.
Система может дополнительно содержать блок обработки данных, и указанный этап измерения осадки судна с использованием по меньшей мере одного устройства оптического формирования изображений может дополнительно включать:
захват оптического изображения марок осадки на корпусе судна;
эксплуатацию блока обработки данных для выполнения обработки оптического изображения посредством оптического распознавания знаков (OCR) для предоставления данных OCR; и
дальнейшую обработку данных OCR указанным блоком обработки данных при определении данных оптического измерения осадки.
Этап измерения осадки судна с использованием по меньшей мере одного устройства оптического формирования изображений может дополнительно включать:
эксплуатацию измерительного устройства для измерения расстояния между по меньшей мере одной точкой на корпусе судна и по меньшей мере одним устройством оптического формирования изображений; и
измерение относительного угла между первым и вторым положениями оптической оси устройства оптического формирования изображений, при этом первое положение является заданным положением, и второе положение является положением устройства оптического формирования изображений, когда измеряют расстояние между устройством оптического формирования изображений и по меньшей мере одной точкой на корпусе.
Система может дополнительно содержать поворотно-наклонную платформу, на которой установлено указанное по меньшей мере одно устройство оптического формирования изображений, и лазерное дальномерное устройство, расположенное смежно с указанным по меньшей мере одним устройством оптического формирования изображений;
и указанная система может быть дополнительно выполнена с возможностью:
эксплуатации лазерного дальномерного устройства для измерения расстояния между по меньшей мере одним устройством оптического формирования изображений и по меньшей мере одной точкой на корпусе судна;
эксплуатации поворотно-наклонного блока для перемещения устройства оптического формирования изображений между по меньшей мере первым заданным положением и вторым положением, в котором измеряют указанное расстояние между указанным устройством оптического формирования изображений и указанной по меньшей мере одной точкой на корпусе; и
эксплуатации поворотно-наклонной платформы для измерения относительного угла между по меньшей мере первым заданным положением и вторым положением.
В первом положении оптическая ось по меньшей мере одного устройства оптического формирования изображений может быть по существу перпендикулярной продольной оси причала, на котором или смежно с которым расположено устройство оптического формирования изображений; и
этап измерения относительного угла между первым положением и вторым положением может включать измерение относительного угла в горизонтальной плоскости и вертикальной плоскости.
Система может быть выполнена с возможностью использования по меньшей мере одного измерения:
расстояния между устройством оптического формирования изображений и корпусом и соответствующего измерения относительного угла между первым положением и вторым положением, в котором измеряют указанное расстояние, для создания набора данных из трехмерных данных расположения по меньшей мере одной точки на поверхности корпуса судна по меньшей мере вблизи от одного набора марок осадки.
Система может использовать набор данных из трехмерных данных по меньшей мере одной точки на поверхности корпуса для определения ширины корпуса судна между соответствующими марками осадки на левой и правой сторонах корпуса судна.
Система может выполнять преобразование по меньшей мере одного изображения, содержащего по меньшей мере один набор марок осадки; при этом при преобразовании используют относительный угол между положением устройства оптического формирования изображений, в котором было получено указанное изображение, и заданным первым положением.
Система может быть выполнена с возможностью эксплуатации согласно этапам:
эксплуатации по меньшей мере одного устройства оптического формирования изображений для получения по меньшей мере одного изображения, содержащего по меньшей мере один набор марок осадки на корпусе судна; и
коррекции указанного изображения на относительный угол между первым заданным положением указанного устройства оптического формирования изображений и вторым положением, в котором указанное изображение было захвачено указанным устройством оптического формирования изображений, для создания по меньшей мере одного откорректированного изображения; и
выполнения оптического распознавания знаков в отношении указанного по меньшей мере одного откорректированного изображения.
Система может быть выполнена с возможностью эксплуатации согласно этапу:
преобразования указанного изображения таким образом, чтобы казалось, будто корпус судна расположен в вертикальной плоскости, в результате чего все точки на корпусе судна кажутся равноудаленными от точки наблюдения устройства оптического формирования изображений.
Система может быть выполнена с возможностью преобразования по меньшей мере одного изображения таким образом, чтобы:
i) казалось, будто оно получено устройством оптического формирования изображений, расположенным в точке наблюдения, которая:
a) перпендикулярна продольной оси причала, у которого поставлено указанное судно; и
b) находится на бесконечном расстоянии от корпуса судна, и
ii) казалось, будто указанное устройство оптического формирования изображений работает с бесконечным увеличением с целью захвата указанного по меньшей мере одного изображения с указанной точки наблюдения.
Система может быть выполнена с возможностью преобразования изображения таким образом, чтобы казалось, будто все лучи света, которые образуют изображение, параллельны друг другу и перпендикулярны плоскости, в которой образовано изображение.
Лучи света могут быть параллельны друг другу как горизонтально, так и вертикально.
Способ может включать преобразование, при котором дополнительно преобразовывают изображение таким образом, чтобы казалось, будто все точки на поверхности корпуса равноудалены от точки наблюдения.
Измерение осадки судна с использованием данных о высоте может включать расположение по меньшей мере одного устройства GNSS или GPS на судне для измерения высоты судна для получения тем самым указанных данных о высоте и использование данных о высоте для определения данных высотного измерения осадки.
Этап измерения осадки судна с использованием указанных данных о высоте может дополнительно включать измерение прилива вблизи от судна для предоставления данных о приливе и использование данных о приливе и данных о высоте для определения данных высотного измерения осадки.
Система может содержать по меньшей мере два устройства GNSS или GPS, одно из которых может быть расположено на левой стороне указанного судна, и одно из которых может быть расположено на правой стороне указанного судна для предоставления тем самым данных о высоте левого борта и данных о высоте правого борта; и
устройство обработки может обрабатывать данные о высоте левого борта и данные о высоте правого борта для определения угла крена судна для предоставления данных об угле крена.
Система может использовать данные об угле крена и оптические данные осадки с причальной стороны судна для определения данных измерения осадки для океанской стороны судна.
Система может дополнительно содержать:
по меньшей мере два устройства GNSS или GPS, расположенных в отдельных местах, расположенных на расстоянии друг от друга в продольном направлении корпуса, для предоставления данных о высоте в носовой части и данных о высоте в кормовой части; и
может эксплуатировать блок обработки для обработки данных о высоте в носовой части и данных о высоте в кормовой части для определения угла килевой качки судна.
По меньшей мере одно устройство оптического формирования изображений может быть расположено на причале, выполненном с возможностью постановки у причала указанного судна.
Устройство оптического формирования изображений может быть расположено в фиксированном положении на указанном причале.
По меньшей мере два указанных устройства оптического формирования изображений могут быть расположены на указанном причале в положениях, подходящих для измерения марок осадки на носу и корме судна.
Система может быть выполнена с возможностью выполнения нескольких измерений осадки судна во время загрузки или разгрузки для предоставления измерения осадки судна в режиме реального времени или почти в реальном времени.
Согласно дополнительному аспекту настоящего изобретения предложен способ определения осадки судна с использованием по меньшей мере одного устройства оптического формирования изображений, включающий:
эксплуатацию устройства оптического формирования изображений для захвата оптического изображения марок осадки на корпусе судна;
выполнение обработки оптического изображения посредством оптического распознавания знаков (OCR) для предоставления данных OCR; и
использование данных OCR при определении данных оптического измерения осадки в отношении судна.
Способ может дополнительно включать:
измерение расстояния между по меньшей мере одной точкой на корпусе судна и по меньшей мере одним устройством оптического формирования изображений; и
измерение относительного угла между первым и вторым положениями оптической оси устройства оптического формирования изображений, при этом первое положение является заданным положением, и второе положение является положением устройства оптического формирования изображений, когда измеряют расстояние между устройством оптического формирования изображений и по меньшей мере одной точкой на корпусе.
По меньшей мере одно устройство оптического формирования изображений может быть расположено на поворотно-наклонной платформе, и по меньшей мере одно лазерное дальномерное устройство может быть расположено смежно с по меньшей мере одним устройством оптического формирования изображений.
Способ может дополнительно включать эксплуатацию лазерного дальномерного устройства для измерения расстояния между по меньшей мере одним устройством оптического формирования изображений и указанной по меньшей мере одной точкой на корпусе судна;
и использование поворотно-наклонной платформы для перемещения устройства оптического формирования изображений во второе положение, и использование указанной поворотно-наклонной платформы для измерения относительного угла между указанным первым положением и указанным вторым положением.
В первом положении оптическая ось устройства оптического формирования изображений может быть по существу перпендикулярной продольной оси причала, на котором или смежно с которым расположено указанное устройство оптического формирования изображений;
и измерение относительного угла между указанным первым положением и указанным вторым положением может включать измерение относительного угла в горизонтальной плоскости и вертикальной плоскости.
Способ может дополнительно включать использование измерений:
i) расстояния между устройством оптического формирования изображений и корпусом; и
ii) относительного угла между первым положением и вторым положением,
для создания набора трехмерных данных расположения по меньшей мере одной точки на поверхности корпуса по меньшей мере вблизи от одного набора марок осадки.
Способ может дополнительно включать этап использования измерений:
i) расстояния между устройством оптического формирования изображений и корпусом; и
ii) относительного угла между первым положением и вторым положением,
для определения ширины корпуса судна между соответствующими марками осадки на левой и правой сторонах корпуса судна.
Способ может дополнительно включать этап выполнения преобразования по меньшей мере одного изображения, содержащего по меньшей мере один набор марок осадки; при этом при преобразовании могут использовать относительный угол между вторым положением, в котором указанное изображение было захвачено устройством оптического формирования изображений, и указанным первым положением.
Способ может дополнительно включать этапы:
получения по меньшей мере одного изображения, содержащего по меньшей мере один набор марок осадки;
коррекции указанного изображения на относительный угол между вторым положением, в котором указанное изображение было захвачено устройством оптического формирования изображений, и указанным первым положением для создания откорректированного изображения; и
выполнения оптического распознавания знаков в отношении указанного откорректированного изображения.
Способ может дополнительно включать этап преобразования указанного изображения таким образом, чтобы казалось, будто корпус судна расположен в вертикальной плоскости, в результате чего все точки на корпусе судна кажутся равноудаленными от точки наблюдения устройства оптического формирования изображений.
Преобразование можно выполнять для преобразования изображения таким образом, чтобы казалось, будто оно получено устройством оптического формирования изображений:
i) расположенным в точке наблюдения, которая:
a) перпендикулярна продольной оси причала, у которого поставлено указанное судно, и
b) находится на бесконечном расстоянии от корпуса судна, и
ii) работающим с бесконечным увеличением.
Преобразование можно выполнять для преобразования изображения таким образом, чтобы казалось, будто все лучи света, которые образуют изображение, параллельны друг другу и перпендикулярны плоскости, в которой образовано изображение.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
Ниже будут описаны варианты осуществления со ссылкой на прилагаемые графические материалы, в которых:
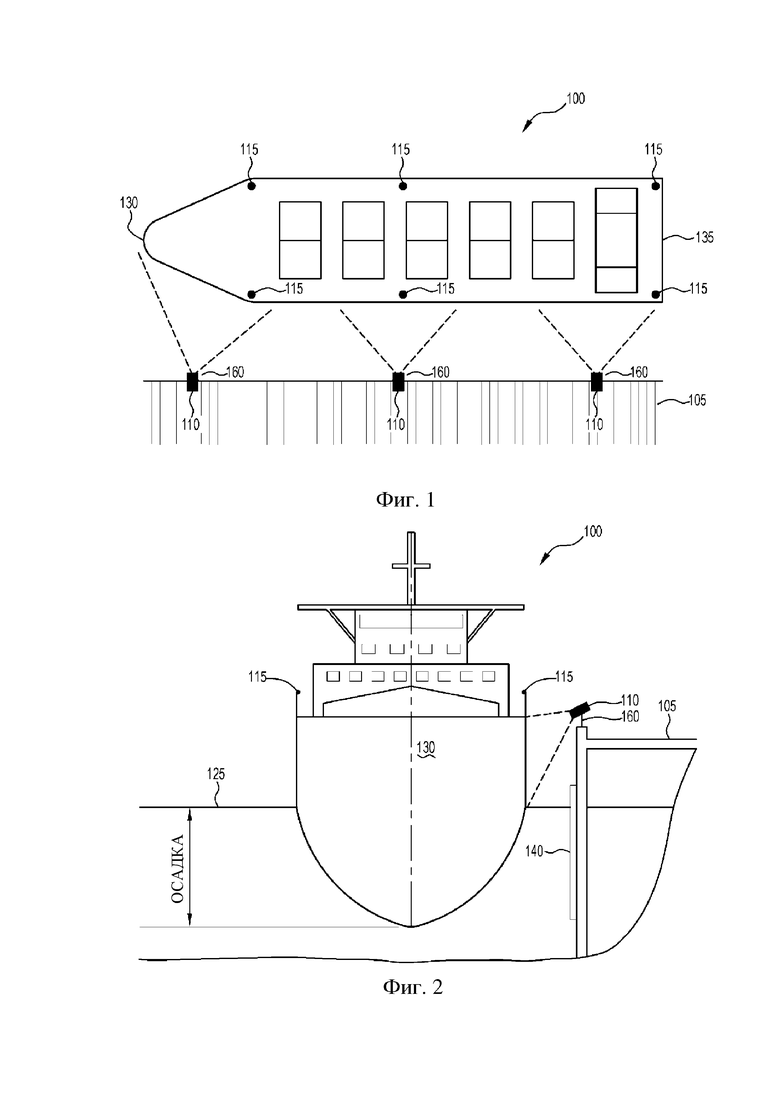
на фиг. 1 показано схематическое представление в виде сверху судна, пришвартованного у причала;
на фиг. 2 показано схематическое представление в виде спереди судна, пришвартованного у причала, на котором показана осадка судна;
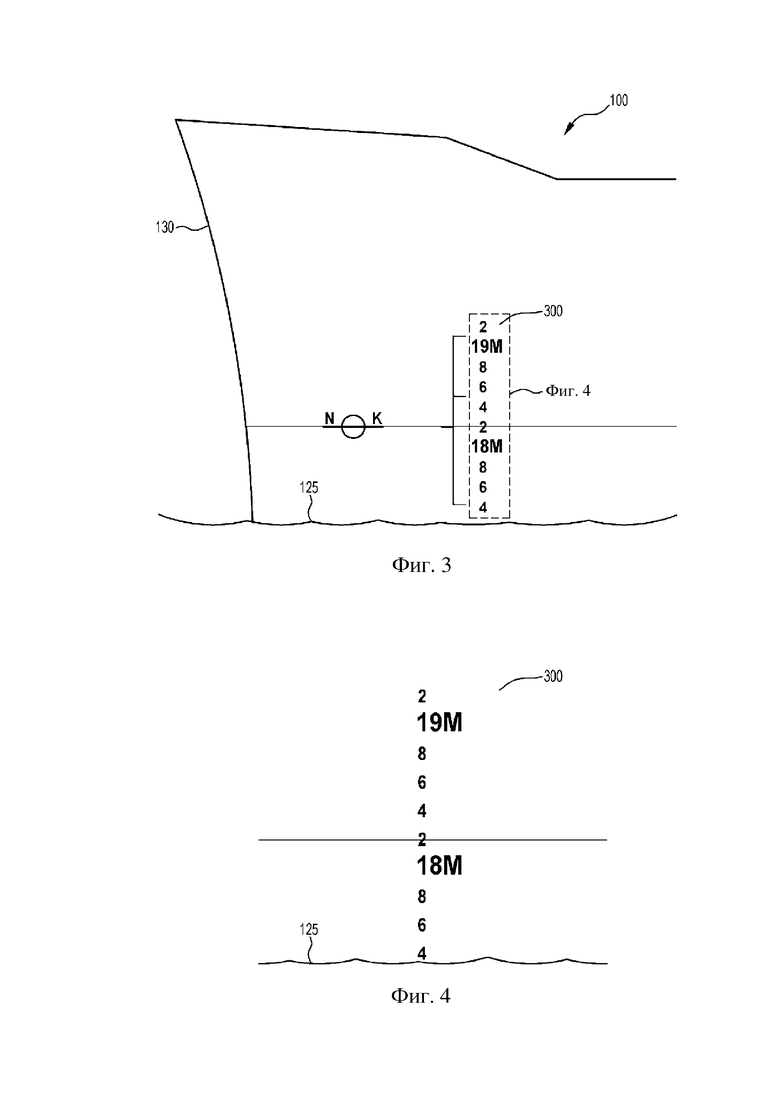
на фиг. 3 показан схематический вид сбоку носа судна, пришвартованного у причала, на котором показана шкала осадки;
на фиг. 4 показан более подробный схематический вид спереди шкалы осадки, показанной на фиг. 3;
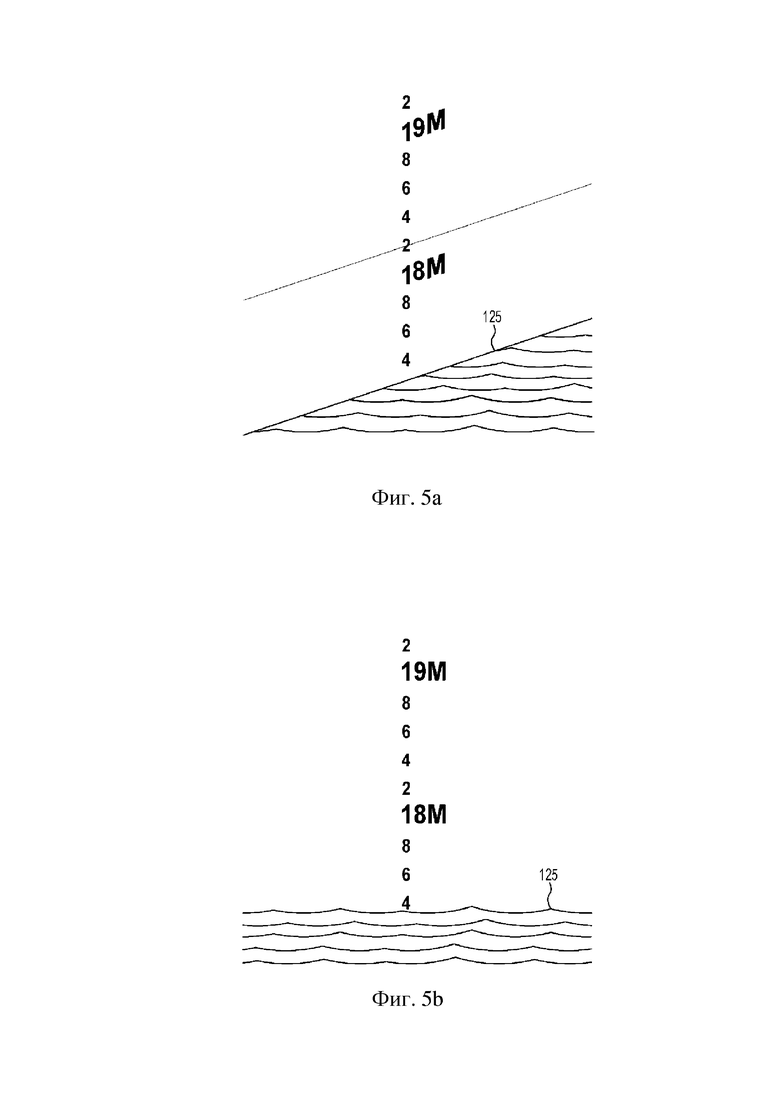
на фиг. 5a показано представление оптического изображения шкалы осадки, показанной на фиг. 3, полученного из устройства оптического формирования изображений, расположенного на причале и размещенного под углом к шкале осадки;
на фиг. 5b показано представление изображения, показанного на фиг. 5a, откорректированного на угол, под которым было получено изображение;
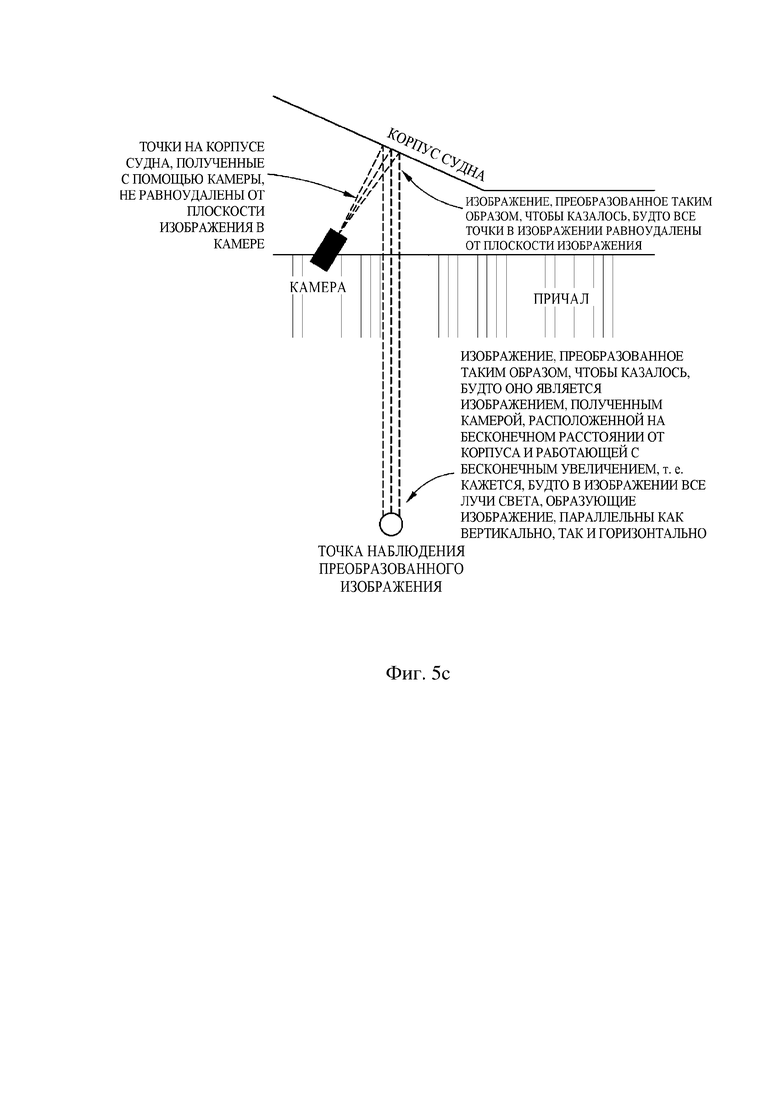
на фиг. 5c показано схематическое представление преобразования, выполненного в отношении изображения, показанного на фиг. 5a;
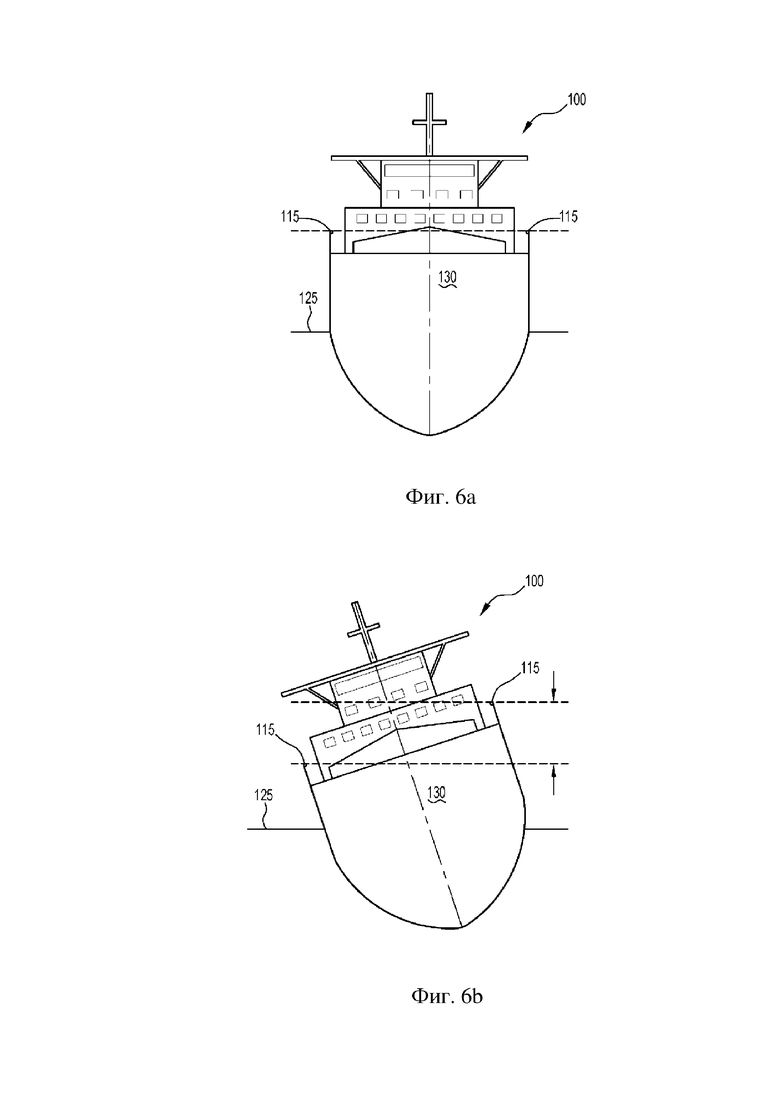
на фиг. 6a показано представление судна без крена;
на фиг. 6b показано представление кренящегося судна;
на фиг. 7 проиллюстрирован способ определения осадки судна с использованием оптических измерений;
на фиг. 8 проиллюстрирован способ автоматического обнаружения положения марок осадки на корпусе;
на фиг. 9 проиллюстрирован способ коррекции изображения марки осадки для того, чтобы могла быть определена осадка судна;
на фиг. 10 проиллюстрирован способ определения марки осадки шкалы осадки, которая является смежной с ватерлинией судна;
на фиг. 11 проиллюстрирован способ определения осадки судна на основе оптической, лазерной и приливной (OLT) составляющих;
на фиг. 12 проиллюстрирован способ определения уровня воды в изображении и вычисления осадки судна; и
на фиг. 13 проиллюстрирован способ объединения измерений осадки на основе уровня воды, измерений осадки на основе OLT и измерений осадки судна на основе GNSS.
ОПИСАНИЕ КОНКРЕТНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
В вариантах осуществления настоящего изобретения предложены системы и способы автоматического измерения осадки судна, когда оно поставлено у причала для загрузки или разгрузки. В таких вариантах осуществления могут быть предусмотрены как оптические измерения, так и измерения осадки судна, выполняемые посредством глобальной навигационной спутниковой системы (GNSS). Результаты измерения, полученные от любой из этих систем, могут быть использованы для подтверждения измерения для определения веса по осадке судна другой системой. В одном варианте осуществления систему на основе GPS или GNSS используют для подтверждения точности измерения для определения веса по осадке судна посредством оптической системы или вероятности ошибки в нем.
Осадка судна является расстоянием от ватерлинии до днища корпуса судна (как изображено на фиг. 2). Осадка судна обычно изменяется с загрузкой и разгрузкой судна и с изменениями в балласте.
Судна обычно имеют шкалы 300 осадки и грузовые марки, нанесенные на их корпуса. Шкала 300 осадки представляет собой ряд чисел, написанных краской вертикально на корпусе, как изображено на фиг. 3 и фиг. 4. Осадку судна измеряют путем считывания числа шкалы осадки, расположенного на ватерлинии 125. Судно обычно имеет шесть шкал осадки, нанесенных на его корпус, в том числе две смежных с носом 130 (одна на левой стороне и одна на правой стороне), две смежных с кормой 135 (одна на левой стороне и одна на правой стороне) и две в средней части судна (одна на левой стороне и одна на правой стороне).
Грузовая марка представляет собой линию, которая показывает наибольшую нагрузку для судна. На боку судна может быть несколько грузовых марок, нанесенных для того, чтобы указывать наибольшую нагрузку для случаев, когда судно находится в тропических водах, холодных водах и в разное время года.
Обратимся к фиг. 1 и фиг. 2, на которых показано судно 100, поставленное у причала 105. Судно 100 имеет шесть блоков 115 GNSS, расположенных на его палубе надстроек, в том числе два смежных с носом 130 судна (один на левой стороне и один на правой стороне), два в средней части судна (один на левой стороне и один на правой стороне) и два смежных с кормой 135 судна (один смежный с левой стороной и один смежный с правой стороной). Блоки 115 GNSS устанавливают, когда судно прибывает в порт, или после постановки судна у причала 105, и они функционируют для передачи данных GNSS о местоположении на блок 155 управления. Блоки GNSS выполнены с возможностью передачи данных о высоте, широте и долготе на блок 155 управления по беспроводной сети, расположенной в порту, в котором судно поставлено у причала.
В этом варианте осуществления блок 155 управления расположен на расстоянии от причала 105 и содержит процессор, запоминающее устройство, операционную систему и программу для автоматизированного определения веса по осадке судна. Блок 155 управления может находиться в связи с беспроводной сетью, расположенной в порту.
В варианте осуществления, показанном на фиг. 1, три устройства 110 оптического формирования изображений расположены на причале 105. Устройства 110 оптического формирования изображений расположены на поворотно-наклонных монтажных блоках 160. Устройства 110 оптического формирования изображений и поворотно-наклонные монтажные блоки 160 находятся в связи с блоком 155 управления и управляются им и программой для автоматизированного определения веса по осадке судна. В альтернативных вариантах осуществления предусмотрено другое количество устройств 110 оптического формирования изображений, например, одно или два устройства оптического формирования изображений.
Устройства оптического формирования изображений 110 установлены в фиксированном положении на причале 105 или в порту, или могут быть передвижными относительно причала 110 и судна 100, и могут быть расположены вручную оператором смежно с судном после того, как оно поставлено у причала, или могут быть установлены на пути или рельсы, которые позволяют блоку 155 управления управлять расположением устройств оптического формирования изображений на путях или рельсах.
В варианте осуществления с тремя устройствами 110 оптического формирования изображений устройства 110 оптического формирования изображений и поворотно-наклонные монтажные блоки 160 расположены на причале 105 или смежно с ним, смежно с марками шкалы осадки на судне 300, одно на носу 130, одно в средней части судна и одно на корме 135 судна.
Блок 155 управления управляет каждым устройством 110 оптического формирования изображений и соответствующими поворотно-наклонными монтажными блоками 160 для захвата одного или нескольких оптических изображений шкалы 300 осадки. Эти изображения могут быть захвачены как видео или как неподвижные изображения, но обычно их захватывают как видео. Блок 155 управления затем обрабатывает оптические изображения, используя программное обеспечение для обработки изображений (как дополнительно описано ниже), включая программное обеспечение для оптического распознавания знаков (OCR), с целью определения марки шкалы осадки, смежной с ватерлинией 125. Это дает измерение осадки судна 100 на основе оптической составляющей в соответствующем месте (а именно на носу, на корме или в средней части судна) и на стороне судна, которая является смежной с причалом (на левой стороне или на правой стороне).
Блок 155 управления также получает данные GNSS от блоков 115 GNSS и обрабатывает эти данные для определения осадки судна в шести местах осадки на корпусе. Для выполнения этого блок 155 управления может использовать широту, долготу и данные о высоте от шести блоков GNSS, чтобы обеспечить соответствие поверхности судну рядом с блоками GNSS. Эту поверхность вместе с данными прилива, полученными от датчика 140 прилива, используют при вычислении осадки судна. Датчик 140 прилива обычно расположен в порту или на причале 105 и предоставляет данные в режиме реального времени или почти в реальном времени касательно относительной высоты прилива. Разница между относительным уровнем ватерлинии 125 и высотой поверхности, полученной на основе местоположения шести блоков GNSS, может быть использована для определения геометрической высоты поверхности над уровнем воды смежно с каждой из шкал осадки. Эту информацию можно объединять с первоначальным оптическим измерением осадки судна для установления осадки судна, что соответствует конкретной разнице в высоте между поверхностью и приливом. При загрузке или разгрузке судна изменения в высоте поверхности и прилива предоставляют меру любого изменения в осадке судна.
По мере выполнения загрузки или разгрузки судна измерение осадки судна на основе GNSS может быть использовано для верификации последующих оптических измерений осадки судна. Альтернативно, измерение осадки судна на основе GNSS может быть использовано вместо оптического измерения осадки судна, если оптическое измерение не может быть получено или если полагают, что оно неточное или ненадежное.
Блок 155 управления может также иметь доступ к данным GNSS для определения угла крена судна. Его вначале определяют на основе разницы в высоте между блоками GNSS, расположенными на левой стороне и на правой стороне судна в средней части судна. Как изображено на фиг. 6a и фиг. 6b, разница в высоте между правой стороной и левой стороной судна может быть использована для вычисления крена судна.
После того, как определена разница в высоте между блоками GNSS в средней части судна, эта информация может быть использована для калибровки разницы в высоте между любыми блоками GNSS, расположенными в носовой части и в кормовой части судна. Эта калибровка является необходимой, так как палуба и/или леерные ограждения, расположенные в носовой части и в кормовой части судна, могут иметь наклон. Следствием любого наклона в палубе или леерных ограждениях является то, что рассогласование блоков GNSS на левой стороне и на правой стороне с большой вероятностью даст неточные данные об угле крена судна. Путем коррекции любой разницы в высоте блоков GNSS на левой стороне и на правой стороне, расположенных в носовой части и в кормовой части судна, возможно использовать данные о высоте от этих блоков GNSS для определения угла крена судна во время загрузки. Это полезно, когда, например, один из блоков GNSS в средней части судна прекращает работать во время загрузки судна.
Угол крена на носу 130 и ширина судна на ватерлинии смежно с носом могут быть использованы для вычисления измерения осадки смежно с носом 130 на океанской стороне судна. Это можно повторять для каждой из шкал осадки на океанской стороне судна, т.е. шкал осадки, смежных с кормой 135 и в средней части судна.
Осадку судна 100 можно контролировать во время загрузки и разгрузки, повторяя вышеупомянутые измерения осадки судна на основе оптической составляющей и GNSS через равные промежутки времени на протяжении всего процесса загрузки и разгрузки. Измерение осадки можно получать по меньшей мере один раз в минуту во время загрузки или разгрузки и предпочтительно чаще, чем это, для предоставления измерений осадки судна во время загрузки и/или разгрузки в режиме реального времени или почти в реальном времени.
В альтернативных вариантах осуществления дальномерное устройство, такое как дальномерное устройство на основе лазера, расположено смежно с устройством 110 оптического формирования изображений и поворотно-наклонным блоком 160. Лазерное дальномерное устройство можно эксплуатировать вместе с поворотно-наклонным блоком 160 для сканирования корпуса судна 100 и генерирования набора данных расстояния от различных точек на поверхности корпуса до поворотно-наклонного блока 160. Эти данные можно комбинировать с информацией об угле поворота и наклона для того, чтобы было известно расстояние от различных точек на корпусе до поворотно-наклонного блока наряду с относительным углом этих точек к заданному положению поворотно-наклонного блока. На основе этой информации можно сгенерировать набор данных о трехмерном профиле поверхности корпуса. Любой такой набор данных обычно имеет разрешение по меньшей мере четыре точки сканирования на квадратный метр корпуса.
Набор трехмерных данных корпуса и относительный угол точек сканирования на корпусе к заданному положению поворотно-наклонного блока 160 (и устройства 110 оптического формирования изображений) могут быть использованы для преобразования оптических изображений шкалы 300 осадки для того, чтобы изображение могло быть обработано с целью определения осадки судна.
Обратимся к фиг. 3 и фиг. 4, где на фиг. 3 показана шкала 300 осадки, расположенная смежно с носом 130 судна 100. Шкала осадки состоит из марок метров, между которыми имеются марки 10 см. На фиг. 3 и фиг. 4 видны марки шкалы осадки 19 метров и 18 метров, при этом между ними также видны марки 80 см, 60 см, 40 см и 20 см.
Шкала 300 осадки показана более подробно на фиг. 4, на которой показано, что ватерлиния 125 пересекается с числом «4» (т.е. марка 40 см), который находится ниже марки шкалы осадки 18 метров. Марку шкалы осадки 19 метров можно увидеть над маркой шкалы осадки 18 метров. Марка шкалы осадки 17 метров невидима, так как она находится ниже ватерлинии 125. Ватерлиния 125, смежная с числом «4», которое находится ниже марки 18 метров, указывает на то, что осадка корпуса составляет 17,4 метра. Линия 170, проходящая через марку 18,2 метра, отражает изменение в расцветке корпуса судна.
Обратимся к фиг. 5a, фиг. 5b и фиг. 5c. На фиг. 5a показано изображение шкалы 300 осадки, которое было получено, когда оптическая ось устройства 110 оптического формирования изображений расположена под углом, который не является горизонтальным и который не является перпендикулярным продольной оси причала.
На фиг. 5b показано преобразованное изображение шкалы осадки, показанное на фиг. 5a. На фиг. 5c показано схематическое представление преобразования, которое было выполнено в отношении изображения на фиг. 5a с целью создания изображения на фиг. 5b. Изображение, показанное на фиг. 5a, было получено, когда устройство оптического формирования изображений было расположено в месте А, при этом устройство оптического формирования изображений находилось в положении с углами как поворота, так и наклона относительно заданного положения. Преобразование выполняют для корректирования изображение таким образом, что кажется, словно изображение было получено, когда устройство 110 оптического формирования изображений было расположено в месте B. Преобразование создает изображение таким образом, что кажется, словно изображение было получено устройством оптического формирования изображений, размещенным в точке наблюдения, которая находится на бесконечном расстоянии от корпуса судна, и при этом устройство оптического формирования изображений имеет бесконечное увеличение. В дополнение к этому преобразование может корректировать все точки в изображении таким образом, что они кажутся равноудаленными от точки наблюдения.
Следствием преобразования является то, что изображение создают таким образом, словно все лучи света от поверхности корпуса, которые образуют изображение, являются горизонтальными и параллельными друг другу и исходят из точек, равноудаленных от точки наблюдения изображения. Преобразование повышает надежность обработки посредством оптического распознавания знаков (OCR), выполняемой в отношении цифр, образующих шкалу осадки, а также повышает надежность определения уровня воды в изображении. Преобразование может также сохранять относительное местоположение пикселей в изображении в пространстве декартовых координат для того, чтобы можно было определить расстояние от любого пикселя до поверхности воды.
Другими словами, алгоритм коррекции изображения работает так, чтобы сделать точку наблюдения всех пикселей непосредственно перпендикулярной причалу и параллельной поверхности воды на постоянном расстоянии. Это преобразование обеспечивает возможность размещения в изображении марок осадки, которые нанесены краской на корпус, в прямой вертикальной линии и позволяет им иметь один и тот же относительный размер. Уровень воды также оказывается по существу горизонтальным таким образом, что уровень воды может быть определен в любой точке вдоль ватерлинии, при этом средний уровень воды не находится выше или ниже в различных положениях вдоль ватерлинии.
Ниже приведены дополнительные подробности о способах и системах, изложенных в вариантах осуществления. В частности, система может состоять из различных подсистем, включая подсистему машинного зрения, подсистему GNSS; подсистему прилива; подсистему оценки осадки; и пользовательский интерфейс. Каждая из этих подсистем будет описана более подробно ниже.
Подсистема машинного зрения может содержать:
a) блок датчиков, расположенный на причале смежно с каждой маркой осадки (обычно 3 положения – в носовой части, в средней части судна и в кормовой части). Каждый блок датчиков может состоять из:
i. моторизованного поворотно-наклонного блока (PTU);
ii. видеокамеры видимого света с высокой четкостью с моторизованным увеличением, установленной на PTU;
iii. точного лазерного дальномера (измерительного устройства), установленного на PTU и выровненного в одну линию с камерой;
iv. узконаправленного источника света, установленного на PTU и выровненного в одну линию с камерой;
v. монтажных кронштейнов и крепежных средств для прикрепления датчиков к PTU и PTU к причалу;
vi. оборудования для обеспечения возможности осуществления удаленной связи с датчиками;
b) центрального компьютерного сервера с программным обеспечением, выполняющего алгоритмы, состоящего из:
i. компьютера, способного параллельно выполнять сложные алгоритмы машинного зрения;
ii. программного обеспечения для управления блоком датчиков для отправки команд на блоки датчиков (например, для настройки поворота, наклона и увеличения) и для приема видео и данных от блоков датчиков;
iii. программного обеспечения алгоритма машинного зрения для обнаружения положения марок осадки и вычисления осадки из видео и данных блока датчиков;
iv. базы данных для хранения результатов алгоритмов машинного зрения.
Подсистема GNSS может содержать:
a) переносные датчики RTK-GNSS (кинематическая глобальная навигационная спутниковая система, работающая в режиме реального времени), которые установлены на поручни судна возле каждого из наборов марок осадки (обычно 6 наборов марок осадки);
b) сеть радиосвязи для осуществления связи между центральным компьютерным сервером и переносными датчиками GNSS;
c) центральный компьютерный сервер с программным обеспечением, выполняющий алгоритмы, состоящий из:
i. программного обеспечения для осуществления связи с мобильными датчиками RTK-GNSS;
ii. программного обеспечения для математической модели для преобразования данных GNSS и данных прилива в значения осадки и крена;
iii. базы данных для хранения данных о конфигурации и результатов программного обеспечения для математической модели.
Подсистема прилива может содержать систему для измерения уровня прилива в порту и/или на причале в режиме реального времени или почти в реальном времени. Она может подавать измеренные значения прилива на центральный компьютерный сервер посредством системы компьютера и сети.
Подсистема оценки осадки может содержать:
a) программное обеспечение, которое получает данные измерения осадки от подсистемы машинного зрения и подсистемы GNSS и вычисляет предполагаемую осадку для судна, или соответствующей шкалы осадки судна; и
b) базу данных для хранения полученных в результате предполагаемых осадок.
Подсистема пользовательского интерфейса может содержать:
a) переносной компьютер (например, планшет), который можно брать с собой на борт судна;
b) веб-приложение, которое работает на переносном компьютере и отображает в режиме реального времени или почти в реальном времени:
i. предполагаемую осадку в каждом положении марки осадки;
ii. видеозапись о границе раздела воды и марки осадки в каждом положении марки осадки на причальной стороне, предпочтительно с отображением как исходных, так и преобразованных видеоизображений;
iii. информацию о текущем состоянии загрузки судна (например, груз в тоннах, загруженный в каждый трюм);
c) беспроводную сеть, обеспечивающую возможность осуществления связи между переносным компьютером и веб-приложением и компьютерным сервером для управления.
Комбинирование подсистемы машинного зрения и подсистемы GNSS позволяет выполнять измерения осадки как на причальной, так и океанской сторонах судна.
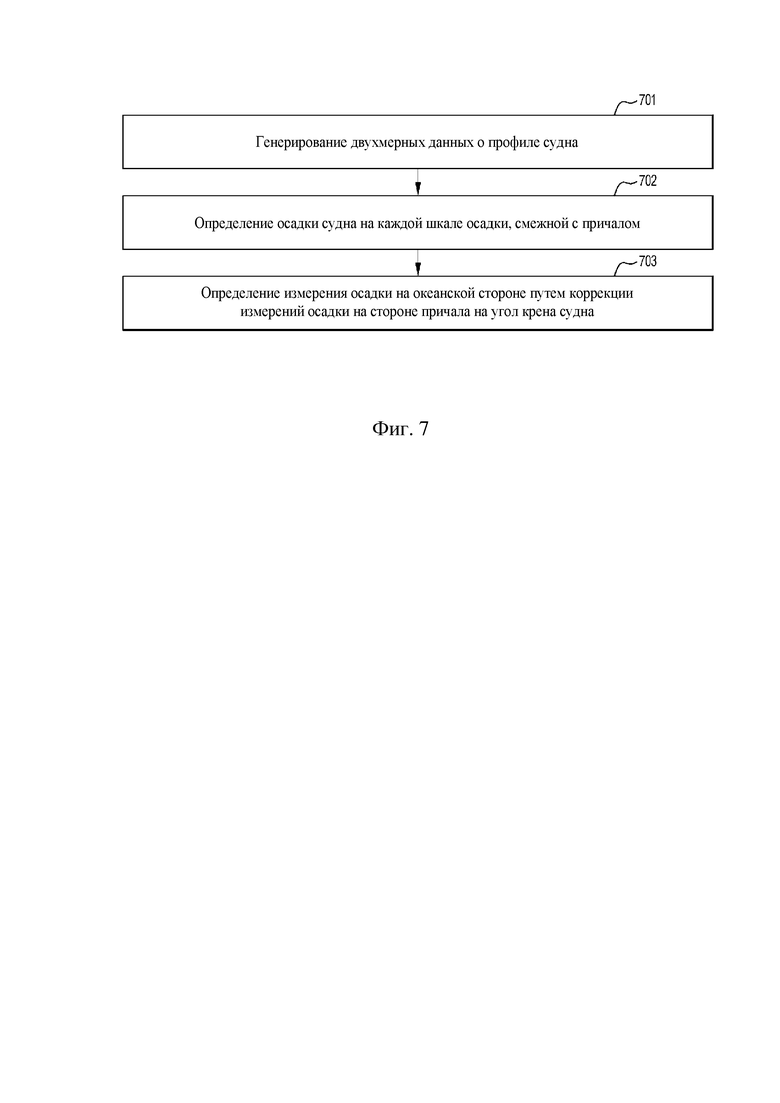
Обратимся к фиг. 7, на которой проиллюстрирован способ определения осадки судна на причальной и океанской сторонах, используя данные оптического измерения осадки и данные измерения осадки GNSS. В частности:
на этапе 701 из результатов измерения, связанных с корпусом и полученных подсистемой машинного зрения, генерируют набор двухмерных данных о ширине судна по отношению к осадке в каждом наборе марок осадки;
на этапе 702 осадки на причальной стороне измеряют оптически посредством подсистемы машинного зрения; и
на этапе 703 осадки на океанской стороне определяют путем коррекции осадок на причальной стороне для крена судна, измеряемого подсистемой GNSS, и расстояния между марками осадки на любой стороне судна на уровне воды.
Автоматическое обнаружение положения марок осадки на корпусе может быть предусмотрено в подсистеме машинного зрения для того, чтобы избежать или свести к минимуму необходимость оператору физически позиционировать или удаленно управлять поворотно-наклонным блоком 160 или увеличением устройства оптического формирования изображений.
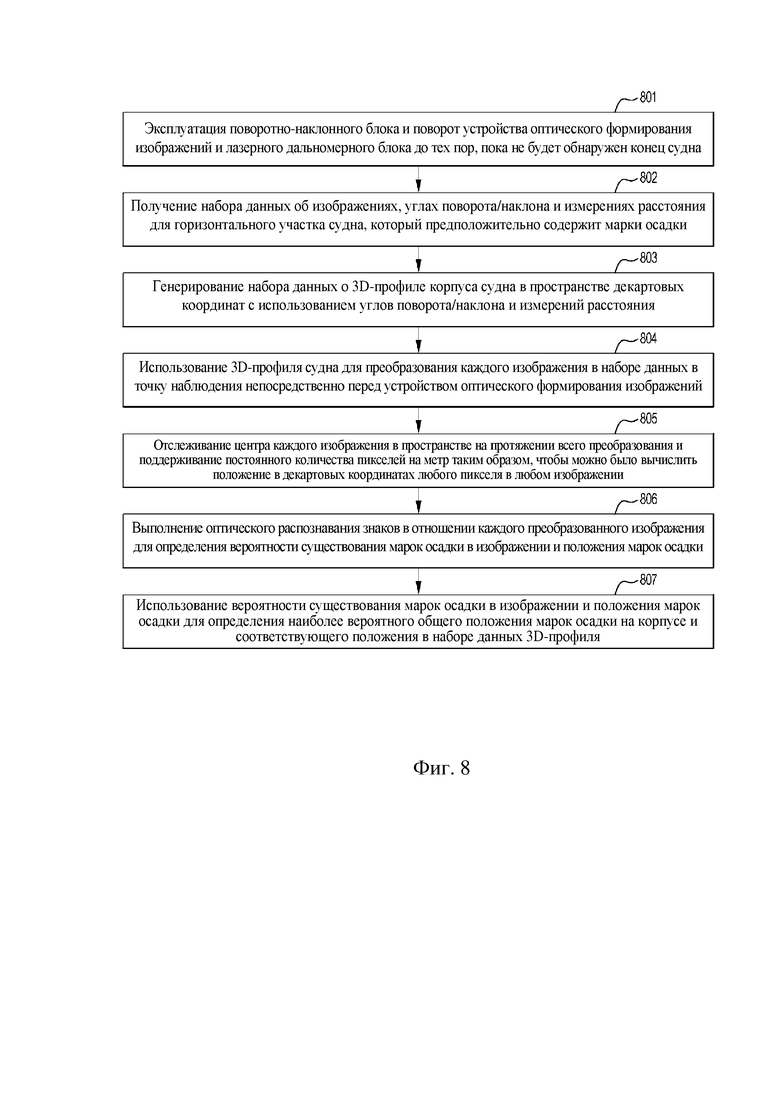
Обратимся к фиг. 8, на которой проиллюстрирован способ автоматического обнаружения положения марок осадки на корпусе подсистемой машинного зрения. В частности:
на этапе 801 блок датчиков (а именно устройство 110 оптического формирования изображений, поворотно-наклонный блок 160 и лазерное дальномерное устройство) поворачивают для обнаружения конца судна;
на этапе 802 собирают набор данных об изображениях, углах поворота и наклона и измерениях расстояния для горизонтального участка судна 100, который предположительно содержит марки 300 осадки и ватерлинию 125;
на этапе 803 углы поворота и наклона и измерения расстояния преобразовывают в 3D-профиль корпуса судна в пространстве декартовых координат;
на этапе 804 каждое из изображений в наборе данных преобразовывают в точку наблюдения непосредственно спереди (что соответствует камере с бесконечным увеличением, которая находится на бесконечном расстоянии от судна, перпендикулярна длине причала и находится горизонтально на одном уровне), используя 3D-профиль корпуса судна (упомянутого выше);
на этапе 805 центр изображения в пространстве отслеживают на протяжении всего преобразования, и количество пикселей на метр поддерживают постоянным таким образом, чтобы можно было вычислить положение в декартовых координатах любого пикселя в любом изображении;
на этапе 806 для определения вероятности существования марок осадки в изображении и положения марок осадки в каждом изображении в отношении преобразованных изображений выполняют алгоритм оптического распознавания знаков (OCR); и
на этапе 807 алгоритм использует вероятность существования марок осадки и положение марок осадки во всех изображениях для вычисления самого вероятного общего положения марок осадки на 3D-поверхности корпуса.
Преобразование изображений направлено на обеспечение того, чтобы казалось, будто изображения были получены с точки наблюдения непосредственно перед марками осадки. Преобразование может также стабилизировать положение марок осадки в полученном в результате изображении или в последовательных изображениях. Это направлено на обеспечение более легкой читаемости изображений человеком и того, чтобы алгоритм машинного зрения мог быть использован для определения измерения осадки независимо от угла, под которым устройство 110 оптического формирования изображений расположено к маркам осадки, и формы корпуса судна.
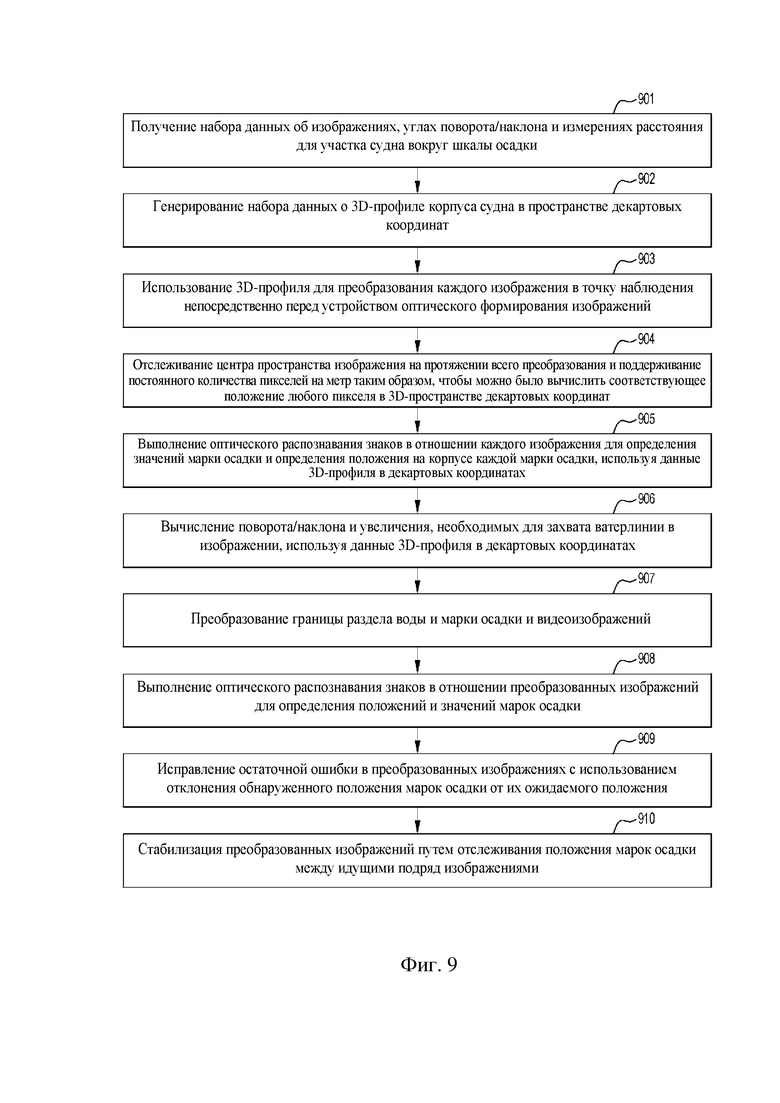
Обратимся к фиг. 9, на которой проиллюстрирован способ коррекции изображения корпуса. В частности:
на этапе 901 для участка судна вокруг марок осадки собирают набор данных об изображениях, углах поворота и наклона и измерениях расстояния. Самое вероятное общее положение марок осадки, вычисленное ранее, используют в качестве начальной точки;
на этапе 902 углы поворота и наклона и измерения расстояния преобразовывают в 3D-профиль корпуса судна в пространстве декартовых координат;
на этапе 903 каждое из изображений в наборе данных преобразовывают в точку наблюдения непосредственно перед устройством 115 оптического формирования изображений (что соответствует камере с бесконечным увеличением, которая находится на бесконечном расстоянии от судна, перпендикулярна длине причала и находится горизонтально на одном уровне), используя 3D-профиль корпуса, упомянутого выше;
на этапе 904 центр изображения в пространстве отслеживают на протяжении всего преобразования, и пиксели на метр поддерживают постоянными таким образом, чтобы можно было легко вычислить положение в декартовых координатах любого пикселя в любом изображении;
на этапе 905 для определения положений и значений марок осадки в отношении преобразованных изображений выполняют алгоритм оптического распознавания знаков (OCR). Регистрируют расположение марок осадки относительно 3D-профиля корпуса;
на этапе 906 поворот, наклон и увеличение, необходимые для правильного захвата ватерлинии 125 в изображениях, вычисляют, используя 3D-профиль, текущий прилив и последнее предполагаемое значение осадки;
на этапе 907 видеоизображения границы раздела воды и марки осадки (т.е. видеоизображения ватерлинии 125) преобразовывают в точку наблюдения непосредственно перед камерой 110, используя 3D-профиль корпуса;
на этапе 908 для определения положений и значений марок осадки в отношении преобразованных изображений выполняют алгоритм оптического распознавания знаков (OCR);
на этапе 909 любую остаточную ошибку в преобразовании корректируют, используя отклонение обнаруженного положения марок осадки от ожидаемого положения; и
на этапе 910 для обеспечения возможности стабилизации преобразованных изображений между последовательными изображениями отслеживают положение марок осадки (т.е. таким образом, чтобы положение марки осадки в изображениях не передвигалось по мере того, как судно следует по морю).
Дополнительные подробности преобразования изображения на этапе 903 описаны на следующих этапах 903a–903d.
903a) Создание сетки точек в пространстве декартовых координат вдоль оси X (горизонтальный причал) и оси Z (вертикальная) таким образом, что сетка слегка больше, чем поле зрения (в метрах) исходного изображения, размещенного в центре декартовых координат исходного изображения.
903b) Вычисление значений точек вдоль оси Y (горизонтальной и перпендикулярной переднему краю причала) для точек сетки, сгенерированных на этапе 903a), используя 3D-профиль, сгенерированный на этапе 902 с целью создания тем самым набора 3D-точек. В качестве 3D-профиля используют эмпирически подобранный многомерный полином.
903c) 3D-точки на этапе 903b) преобразовывают в набор 2D-точек, используя стандартную проекцию 3D на 2D, где в расстоянии от наблюдателя используют расстояние от камеры до изображения (на основе данных лазера), и в углах вращения используют углы камеры к горизонтали и перпендикулярные относительно переднего края причала.
903d) Набор фиксированных 2D-точек в единицах пикселей вычисляют, используя точки, сгенерированные на этапе 903a), и используя пиксели на метр изображения (которое известно благодаря тому, что известен угол поля зрения камеры, и известно расстояние от камеры до различных точек на корпусе судна). Фиксированные 2D-точки представляют точку в преобразованном изображении.
Дополнительные подробности отслеживания пикселей, упомянутого на этапе 904, описаны на следующих этапах 904a–904g.
904a) Набор передвигающихся 2D-точек в единицах пикселей вычисляют с использованием 2D-точек, вычисленных на 903d). Передвигающиеся 2D-точки отражают то, где в исходном изображении находились бы фиксированные точки.
904b) Генерируют два многомерных полинома, которые выполняют сопоставление передвигающихся точек с фиксированными точками. Один для горизонтальных положений пикселя и один для вертикальных положений пикселя.
904c) Полиномы, сформированные на 904b), используют для создания двух 2D-массивов (один для горизонтальных положений пикселя и один для вертикальных положений пикселя), которые выполняют сопоставление преобразованного изображения с исходным изображением. Например, допустим, что значения в положении (1,1) для двух массивов составляют (23, 45), тогда пиксель, который следует поставить в (1,1) в преобразованном изображении, является (23, 45) в исходном изображении.
904d) Сопоставляющие массивы, созданные на 904c), используют для определения того, где в преобразованном изображении будет расположен центральный пиксель из исходного изображения.
904e) Положение центрального пикселя исходного изображения в преобразованном изображении из 904d) используют в качестве центральной точки для повтора этапа 904c) для того, чтобы центр исходного изображения находился в центре преобразованного изображения. Это направлено на то, чтобы декартовы координаты (X, Z) любого пикселя в преобразованном изображении можно было определить на основе его расстояния от центра изображения и масштабирования пикселей на метр, используемого на этапах 903d) и 904b).
904f) Сопоставляющие массивы, созданные на 904e, затем используют с изображением всех 1. Это направлено на то, чтобы создать изображение маски, которое имеет 1, где в исходном изображении для преобразованного изображения присутствует пиксель, и 0, где нет соответствующего пикселя. В преобразованном изображении могут присутствовать пиксели, которые выходят за пределы исходного изображения. Эту маску используют для того, чтобы убедиться в том, что части преобразованного изображения, которые не имеют соответствующей части в исходном изображении, не учитываются остальными алгоритмами машинного зрения.
904g) Сопоставляющие массивы, созданные на 904e), затем используют для создания преобразованного изображения из исходного изображения.
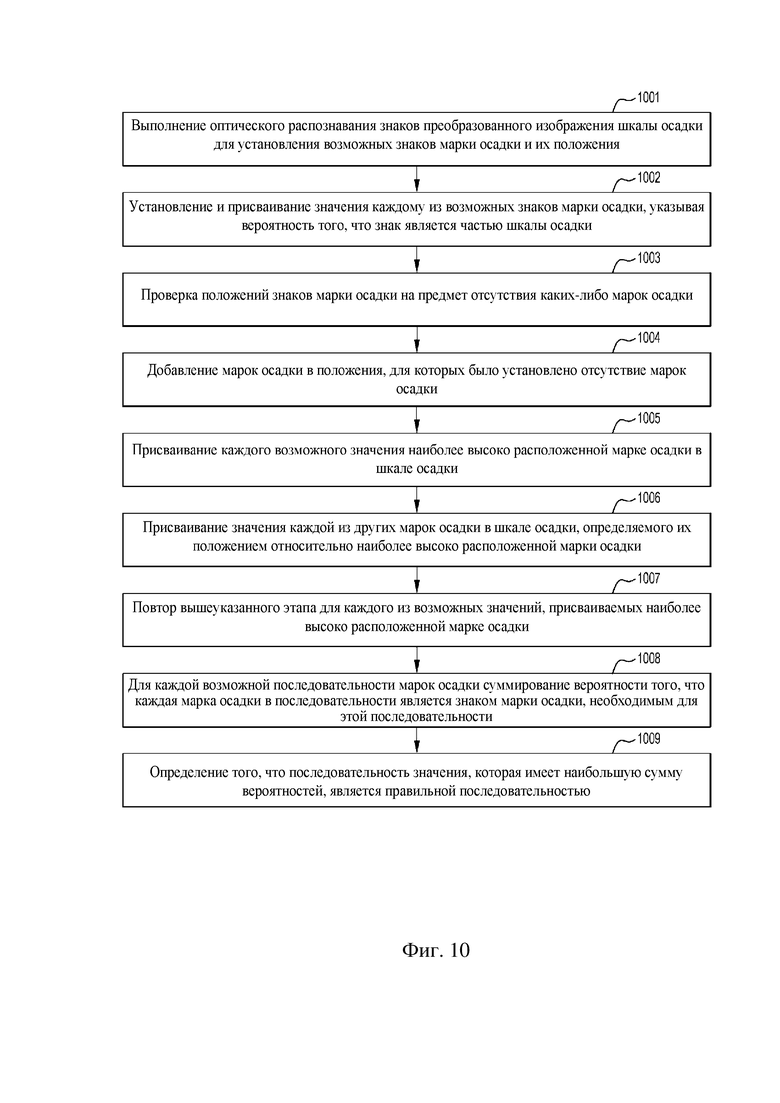
Значения марки осадки могут быть определены путем выбора последовательности марок с наибольшей суммой вероятностей того, что каждая марка осадки в последовательности представляет собой значение, установленное согласно ее значению в последовательности; и на основе известной схемы марок осадки. Это позволяет правильно определять значения марки осадки, даже когда некоторые значения марки осадки не поддаются чтению человеком по отдельности.
Обратимся к фиг. 10, на которой проиллюстрирован способ определения значения марки осадки на ватерлинии судна. В частности:
на этапе 1001 используют алгоритм OCR для установления возможных знаков марки осадки в изображении и для установления их положения в изображении;
на этапе 1002 устанавливают и присваивают значение каждому из возможных знаков марки осадки, указывая вероятность того, что он является частью шкалы осадки;
на этапе 1003 положения установленных марок осадки проверяют на предмет отсутствия каких-либо марок осадки;
на этапе 1004 отсутствующие марки осадки добавляют в положения, для которых было установлено отсутствие марок осадки;
на этапе 1005 наиболее высоко расположенной марке осадки на корпусе в изображении дают каждое возможное значение;
на этапе 1006 каждой из других марок осадки в шкале присваивают значение, определяемое ее положением относительно наиболее высоко расположенной марки осадки.
на этапе 1007 повторяют этап 1006 для каждого из возможных значений, присваиваемых наиболее высоко расположенной марке осадки;
на этапе 1008 для каждой возможной последовательности марок осадки суммируют вероятность того, что каждая марка осадки является знаком марки осадки, необходимым для этой последовательности; и
на этапе 1009 определяют, что последовательность значения, которая имеет наибольшую сумму вероятностей, является правильной последовательностью.
Этот алгоритм применяют для определения марок 10 см, а также метровых марок.
В отношении метровых марок способ, показанный на фиг. 10, может быть применен в изображениях под разными углами поворота/наклона, тем самым позволяя определить правильные значения метровых марок на границе раздела воды и марки осадки (уровень 125 воды), даже если метровые марки не поддаются чтению человеком по отдельности на границе раздела воды и марки осадки. Это возможно лишь благодаря тому, что посредством способов, описанных выше, можно установить положение в декартовых координатах каждой метровой марки.
Ниже приведены дополнительные подробности об этапах 1001 и 1002 в способе, предназначенном для определения значений марки осадки на уровне воды.
В отношении этапа 1001:
1001a) В отношении преобразованного изображения применяют краевой фильтр свертки. Это создает изображение в шкале серых тонов, в котором любые края в преобразованном изображении будут иметь более высокие числовые значения.
1001b) Фильтр свертки c эталонами различных чисел марки осадки в качестве ядра применяют в отношении изображения, созданного на этапе 1001a). Эти эталоны являются примерами того, как выглядели бы хорошо образованные марки осадки в случае, если бы в их отношении был применен краевой фильтр свертки. Эти эталоны масштабируют до различных размеров (меньший, равный и больший) ожидаемого размера марки осадки. Результатом этого этапа является набор «изображений» со значениями, которые равны тому, насколько хорошо этот участок краевого изображения соответствует эталону.
1001c) В отношении результата этапа 1001b) применяют алгоритм локальных максимумов, который выдает максимальные значения и положение этих максимальных значений результата этапа 1001b) на малых (в размерах марки осадки) участках.
1001d) Перечень возможных марок осадки генерируют на основе результатов свертки, сгенерированных на этапе 1001c).
В отношении этапа 1002:
Выполняют поиск в перечне возможных марок осадки из этапа 1001d), чтобы найти все совпадающие марки осадки. Совпадающие марки осадки объединяют в одну марку осадки в перечне, который будет иметь разный показатель или «вероятность» для каждого возможного числового значения. Например, если совпадают «2» с показателем 0,3, другая «2» с показателем 0,15 и «4» с показателем 0,8, их объединяют в одну марку осадки с показателем 0,3 для значения 2 и с показателем 0,8 для 4.
Осадку судна можно определять двумя разными способами. В первом способе осадку судна определяют путем объединения данных OCR из видеоизображений, содержащих марки осадки, с измерениями расстояния и точными измерениями прилива. В этом способе не требуется, чтобы уровень воды был обнаружен в изображениях (этот способ называют способом OLT – OCR, Laser distance (лазерная дальнометрия) и Tide (прилив)).
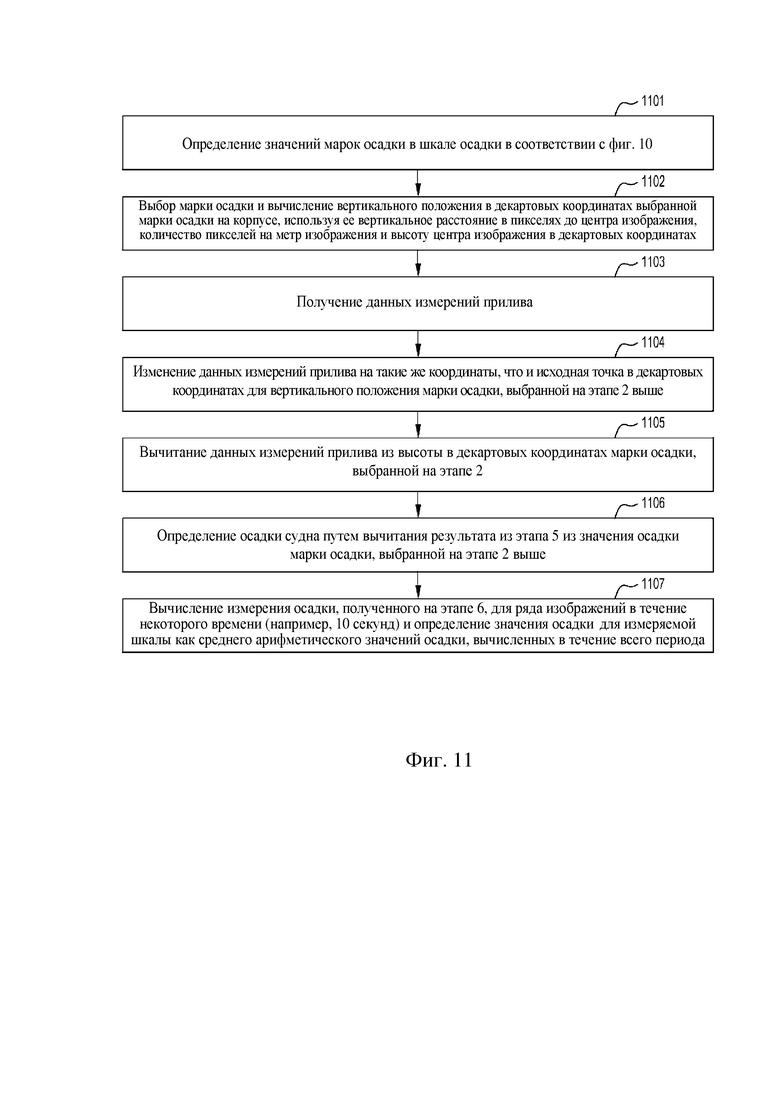
Обратимся к фиг. 11, на которой более подробно проиллюстрирован способ OLT для определения осадки судна. В частности:
на этапе 1101 преобразовывают изображения из видео марок осадки и применяют алгоритмы OCR, как определено выше, таким образом, что обнаруживают положение и значение марок осадки, и при этом имеются постоянное количество пикселей на метр по изображению, и известно расположение центра изображения в пространстве декартовых координат;
на этапе 1102 выбирают марку осадки и вычисляют вертикальное положение в декартовых координатах выбранной марки осадки, используя ее вертикальное расстояние в пикселях до центра изображения, количество пикселей на метр изображения и высоту центра изображения в декартовых координатах;
на этапе 1103 получают данные измерений прилива;
На этапе 1104 изменяют данные измерений прилива на такие же координаты, что и исходная точка в декартовых координатах для вертикального положения марки осадки, выбранной на этапе 2 выше;
на этапе 1105 вычитают измерение прилива из высоты в декартовых координатах марки осадки, выбранной на этапе 1102;
на этапе 1106 определяют осадку судна путем вычитания результата вычисления на этапе 1105 из значения осадки марки осадки, выбранной на этапе 2; и
на этапе 1107 измерение осадки, полученное на этапе 1106, вычисляют для ряда изображений в течение некоторого времени (например, 10 секунд), и значение осадки для измеряемой шкалы определяют как среднее арифметическое значений осадки, вычисленных в течение всего периода.
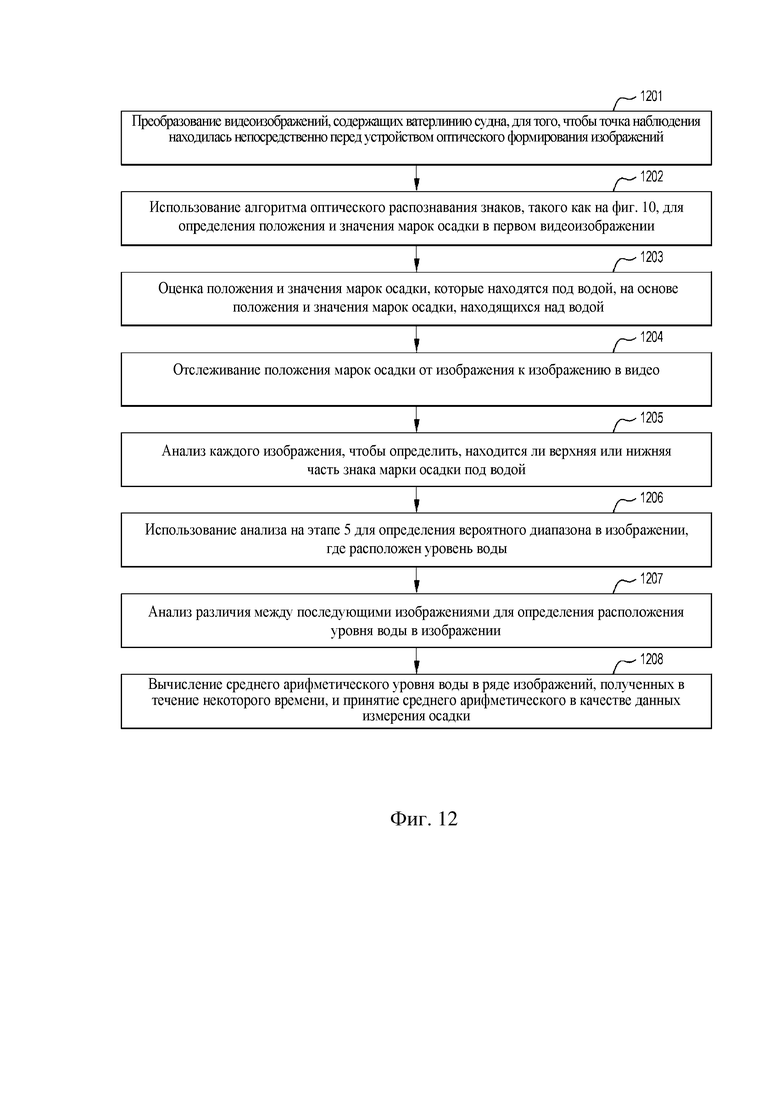
Обратимся к фиг. 12, на которой проиллюстрирован второй способ определения осадки судна. В частности, на фиг. 12 изображен алгоритм машинного зрения, который может быть использован для определения уровня 125 воды в изображениях (и, следовательно, осадки судна) путем определения того, какие марки осадки находятся под водой. В частности:
на этапе 1201 видеоизображения, содержащие ватерлинию 125 судна, преобразовывают для того, чтобы точка наблюдения находилась непосредственно перед устройством 110 оптического формирования изображений в соответствии со способом, рассмотренным выше;
на этапе 1202 используют алгоритм OCR для определения положения и значения марок осадки в первом изображении видео;
на этапе 1203 оценивают положение и значение марок осадки под водой на основе положения и значения марок осадки, не находящихся под водой;
на этапе 1204 положение марок осадки отслеживают от изображения к изображению в видео;
на этапе 1205 анализируют каждое изображение, чтобы определить, находится ли верхняя или нижняя часть знака каждой марки осадки под водой (следует иметь в виду, что используют верхнюю и нижнюю марок осадки, поскольку это является положением в изображении, которое больше всего изменяется в случаях, когда вода присутствует или не присутствует, даже в случае с очень чистой водой);
на этапе 1206 верхние и нижние части марки осадки, которые находятся (или не находятся) под водой, используют для определения вероятного диапазона в изображении, где должен быть уровень воды (т.е. рядом с местом, где верхняя или нижняя часть марки осадки не находится в воде, и верхняя или нижняя часть марки осадки ниже находятся под водой);
на этапе 1207 анализируют различия между изображениями видео для определения расположения уровня воды. В отношении алгоритма могут быть применены весовые коэффициенты на основе обнаруженного вероятного диапазона, используя верхние и нижние части марки осадки; и
на этапе 1208 измерение осадки принимают в качестве среднего арифметического осадки, вычисленного для каждого из изображений в течение некоторого времени (например, 10 секунд).
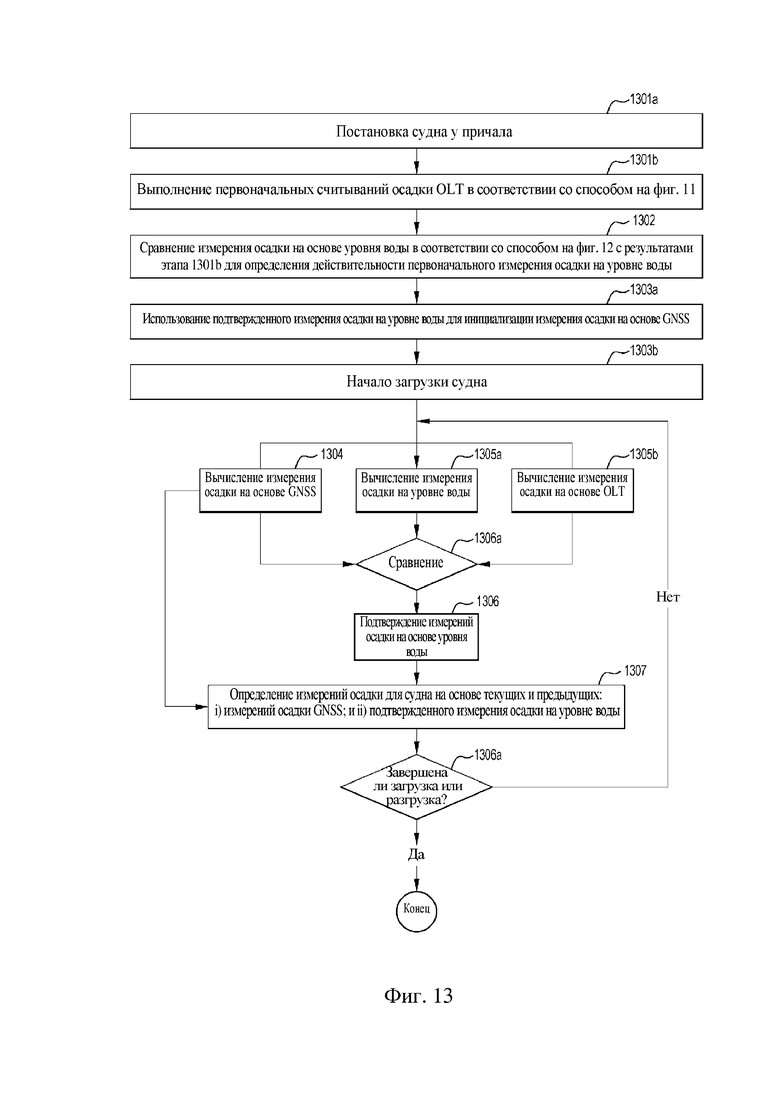
Обратимся к фиг. 13, на которой проиллюстрирован способ объединения осадок на основе GNSS, осадок OLT на основе машинного зрения и осадок уровня воды на основе машинного зрения для вычисления предполагаемого значения осадки в режиме реального времени. В частности:
на этапе 1301 и для каждой шкалы осадки на судне на причальной стороне первоначальные показания осадки OLT в соответствии со способом, показанным на фиг. 11, принимают в ряде (например, 7) различных вертикальных положений вдоль марок осадки; Алгоритм используют для определения того, являются ли первоначальные осадки OLT действительными, и для вычисления для каждой из шкал осадки одного первоначального значения осадки OLT;
на этапе 1302 и для каждой шкалы осадки на судне на причальной стороне действительность первоначальной осадки на уровне воды в соответствии со способом, показанным на фиг. 12, подтверждают путем ее сравнения с первоначальной осадкой OLT;
на этапе 1303 подтвержденные первоначальные осадки на уровне воды используют для инициализации значений осадки на основе GNSS;
на этапе 1304 значения осадки на основе GNSS вычисляют на протяжении всей загрузки, используя изменения в высотных отметках шести датчиков GNSS, расположенных на судне, для моделирования изменения в осадке судна в марках осадки по сравнению с первоначальной осадкой;
на этапе 1305 на протяжении всей загрузки проводят измерения OLT видео на уровне 125 воды в соответствии с фиг. 11 и измерения осадки на уровне воды в соответствии с фиг. 12;
на этапе 1306 для подтверждения измерения осадки на уровне воды каждое из измерений осадки на уровне воды сравнивают как с измерениями осадки OLT, так и с измерениями осадки на основе GNSS; и
на этапе 1307 определяют измерения осадки судна на основе текущих и предыдущих подтвержденных осадок на уровне воды и осадок на основе GNSS.
В способе, показанном на фиг. 13, инициализацию осадки на основе GNSS непрерывно корректируют на основе подтвержденных осадок на уровне воды, и, если не может быть вычислена текущая подтвержденная осадка на уровне воды, результаты системы автоматизированного определения веса по осадке настраивают на осадку на основе GNSS.
Подтверждение трех способов измерения осадки путем сравнения друг с другом значительным образом повышает целостность, надежность и точность по сравнению с использованием только одного способа.
В нижеследующих абзацах приведены дополнительные подробности об этапе 1301.
В алгоритме на этапе 1301 используют среднюю величину показаний осадки OLT, которые находятся в пределах конфигурируемого диапазона средней величины всех показаний осадки OLT. В случае недостаточного количества показаний в пределах конфигурируемого диапазона его считают недействительным;
Этот способ позволяет отбросить все показания с неправильным значением метровой марки и обеспечить, чтобы они не влияли на результат. Это связано с тем, что распространенная ошибка заключается в неправильном определении значения метра, так как в изображении обычно имеются только 3 метровые марки по сравнению с приблизительно десятью марками 10 см.
В этом описании следует понимать, что, если в данном документе приводят ссылку на какую-либо публикацию из уровня техники, то такая ссылка не означает признания того, что эта публикация образует часть общедоступных известных знаний в данной области техники в Австралии или любой другой стране.
В следующей формуле изобретения и предшествующем описании настоящего изобретения, за исключением случаев, когда контекст требует иного в силу явно выраженных формулировок или необходимого логического вывода, слово «содержать» или его варианты, такие как «содержит» или «содержащий», употребляются во включающем смысле, т.е. для указания наличия заявленных признаков, но не для исключения наличия или добавления дополнительных признаков в различных вариантах осуществления настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления поперечным и продольным движением судна относительно морского грузового терминала | 2024 |
|
RU2834495C1 |
| Способ определения осадки и внешнего состояния корпуса судна | 2019 |
|
RU2729495C1 |
| АНАЛИЗАТОР ЦИФРОВОЙ ТОРГОВОЙ ТОЧКИ | 2010 |
|
RU2452021C1 |
| Способ крепления устройства определения средней осадки судна на корпусе судна | 2021 |
|
RU2788458C2 |
| СУДОВОЙ ИЗМЕРИТЕЛЬ ТОЛЩИНЫ ЛЬДА | 2021 |
|
RU2767293C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ПРОВЕРКИ ПРАВИЛЬНОСТИ НЕОДНОЗНАЧНО РАСПОЗНАННЫХ СЛОВ В OCR-СИСТЕМЕ | 2007 |
|
RU2417435C2 |
| УСТРОЙСТВО ОПТИЧЕСКОГО ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ И(ИЛИ) ОРИЕНТАЦИИ ОБЪЕКТОВ И СООТВЕТСТВУЮЩИЕ СПОСОБЫ ОПРЕДЕЛЕНИЯ | 2007 |
|
RU2428709C2 |
| Способ текущего контроля остойчивости судна | 2024 |
|
RU2829030C1 |
| СТОЯНОЧНЫЙ КОМПЛЕКС АЭРОПОРТА | 2020 |
|
RU2781495C1 |
| Способ автоматической посадки воздушного судна | 2023 |
|
RU2839178C2 |
Изобретение относится к области судостроения, в частности к системам и способам осуществления автоматизированного определения веса по осадке судов с помощью оптических измерений и измерений осадки пришвартованного у причала судна на основе GPS/GNSS. Способ определения осадки судна включает этапы: измерения осадки судна с использованием по меньшей мере одного устройства оптического формирования изображений для предоставления данных оптического измерения осадки; измерения осадки судна с использованием данных о высоте, предоставленных по меньшей мере одним устройством GNSS или GPS, для предоставления данных высотного измерения осадки; и использования данных высотного измерения осадки и данных оптического измерения осадки для определения осадки судна. Изобретение повышает целостность, надежность и точность определения осадки судна. 3 н. и 53 з.п. ф-лы, 16 ил.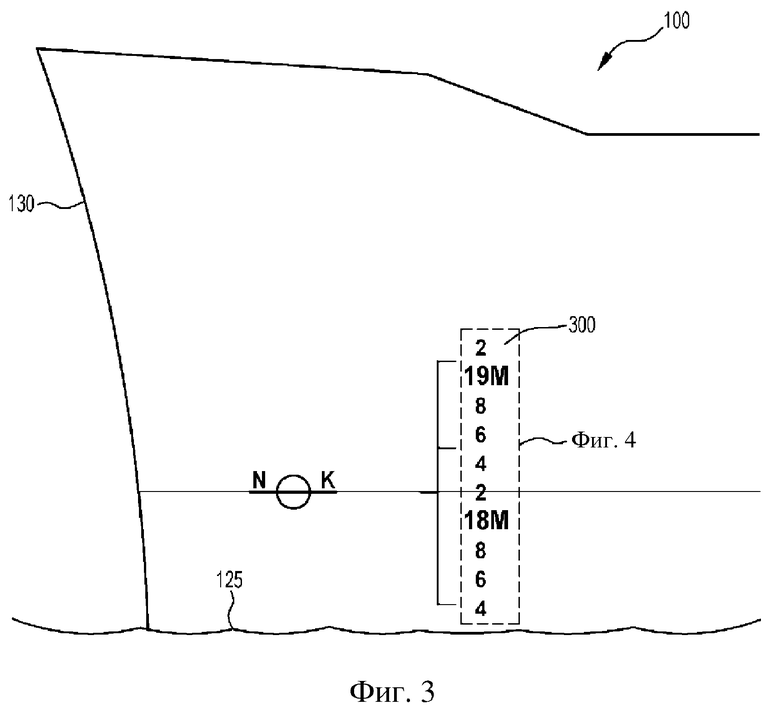
1. Способ определения осадки судна, включающий этапы:
измерения осадки судна с использованием по меньшей мере одного устройства оптического формирования изображений для предоставления данных оптического измерения осадки по осадке судна на основе автоматического обнаружения положения по меньшей мере одной марки осадки на корпусе судна;
использования данных оптического измерения осадки для инициализации данных о высоте, предоставленных по меньшей мере одним устройством GNSS или GPS, для предоставления данных высотного измерения осадки по осадке судна; и
использования данных высотного измерения осадки для предоставления по меньшей мере одного измерения осадки судна после этапа инициализации данных высотного измерения осадки.
2. Способ по п. 1, отличающийся тем, что этап измерения осадки судна с использованием по меньшей мере одного устройства оптического формирования изображений дополнительно включает:
захват оптического изображения по меньшей мере одной марки осадки на корпусе судна;
выполнение обработки оптического изображения посредством оптического распознавания знаков (OCR) для предоставления данных OCR для по меньшей мере одной марки осадки; и
использование данных OCR при определении данных оптического измерения осадки.
3. Способ по п. 2, отличающийся тем, что дополнительно включает этапы:
определения расположения в пространстве декартовых координат по меньшей мере одной марки осадки; и
использования данных OCR и расположения в пространстве декартовых координат по меньшей мере одной марки осадки при определении данных оптического измерения осадки для осадки судна.
4. Способ по п. 3, отличающийся тем, что дополнительно включает этап получения данных о приливе и вычитания данных о приливе из расположения марки осадки в пространстве декартовых координат для определения высоты марки осадки над приливом; и
вычитания высоты марки осадки над приливом из числового значения марки осадки для получения измерения осадки судна.
5. Способ по любому из пп. 1-4, отличающийся тем, что этап измерения осадки судна с использованием по меньшей мере одного устройства оптического формирования изображений включает:
измерение расстояния между по меньшей мере одной точкой на корпусе судна и по меньшей мере одним устройством оптического формирования изображений; и
измерения относительного угла между первым и вторым положениями оптической оси устройства оптического формирования изображений, при этом первое положение является заданным положением, и второе положение является положением устройства оптического формирования изображений, когда измеряют расстояние между устройством оптического формирования изображений и по меньшей мере одной точкой на корпусе.
6. Способ по п. 5, отличающийся тем, что по меньшей мере одно устройство оптического формирования изображений расположено на поворотно-наклонной платформе, и по меньшей мере одно лазерное дальномерное устройство расположено смежно с по меньшей мере одним устройством оптического формирования изображений;
и при этом способ включает:
эксплуатацию лазерного дальномерного устройства для измерения расстояния между по меньшей мере одним устройством оптического формирования изображений и указанной по меньшей мере одной точкой на корпусе судна;
и использование поворотно-наклонной платформы для перемещения устройства оптического формирования изображений во второе положение и использование указанной поворотно-наклонной платформы для измерения относительного угла между указанным первым положением и указанным вторым положением.
7. Способ по п. 6, отличающийся тем, что:
в первом положении оптическая ось устройства оптического формирования изображений является по существу перпендикулярной продольной оси причала, на котором или смежно с которым расположено указанное устройство оптического формирования изображений;
и при этом измерение относительного угла между указанным первым положением и указанным вторым положением включает измерение относительного угла в горизонтальной плоскости и вертикальной плоскости.
8. Способ по любому из пп. 5-7, отличающийся тем, что включает этап:
использования измерений:
i) расстояния между устройством оптического формирования изображений и корпусом; и
ii) относительного угла между первым положением и вторым положением,
для создания набора трехмерных данных расположения по меньшей мере одной точки на поверхности корпуса по меньшей мере вблизи от одного набора марок осадки.
9. Способ по любому из пп. 5-8, отличающийся тем, что включает этап использования:
i) измерений расстояния между устройством оптического формирования изображений и корпусом; и
ii) относительного угла между первым положением и вторым положением,
для определения ширины корпуса судна между соответствующими марками осадки на левой и правой сторонах корпуса судна.
10. Способ по любому из пп. 5-9, отличающийся тем, что включает этап выполнения преобразования по меньшей мере одного изображения, содержащего по меньшей мере один набор марок осадки; при этом при преобразовании используют относительный угол между вторым положением, в котором указанное изображение было захвачено устройством оптического формирования изображений, и указанным первым положением.
11. Способ по любому из пп. 5-9, отличающийся тем, что включает этапы:
получения по меньшей мере одного изображения, содержащего по меньшей мере один набор марок осадки;
коррекции указанного изображения на относительный угол между вторым положением, в котором указанное изображение было захвачено устройством оптического формирования изображений, и указанным первым положением для создания откорректированного изображения; и
выполнения оптического распознавания знаков в отношении указанного откорректированного изображения.
12. Способ по любому из пп. 1-11, отличающийся тем, что дополнительно включает этап:
преобразования указанного изображения таким образом, чтобы казалось, будто корпус судна расположен в вертикальной плоскости, в результате чего все точки на корпусе судна кажутся равноудаленными от точки наблюдения устройства оптического формирования изображений.
13. Способ по п. 12, отличающийся тем, что преобразование выполняют для преобразования изображения таким образом, чтобы казалось, будто оно получено устройством оптического формирования изображений:
i) расположенным в точке наблюдения, которая:
a) перпендикулярна продольной оси причала, у которого поставлено указанное судно, и
b) находится на бесконечном расстоянии от корпуса судна, и
ii) работающим с бесконечным увеличением.
14. Способ по любому из пп. 12 или 13, отличающийся тем, что преобразование выполняют для преобразования изображения таким образом, чтобы казалось, будто все лучи света, которые образуют изображение, параллельны друг другу и перпендикулярны плоскости, в которой образуют изображение.
15. Способ по любому из пп. 1-14, отличающийся тем, что измерение осадки судна с использованием данных о высоте включает расположение по меньшей мере одного устройства GNSS или GPS на судне для измерения высоты судна и получения тем самым данных о высоте и использование данных о высоте для определения осадки судна.
16. Способ по любому из пп. 1-15, отличающийся тем, что включает этапы:
размещения по меньшей мере двух устройств GNSS или GPS на указанном судне в положениях, смещенных в боковом направлении относительно продольной оси указанного судна;
измерения данных о высоте на указанных по меньшей мере двух устройствах GNSS или GSP; и
использования данных о высоте для определения угла крена судна и тем самым предоставления данных об угле крена.
17. Способ по п. 16, отличающийся тем, что включает этап использования данных об угле крена и оптических данных осадки для определения измерения осадки судна для океанской стороны судна.
18. Способ по любому из пп. 16 или 17, отличающийся тем, что включает этап использования данных о высоте от по меньшей мере двух устройств GNSS или GPS для определения угла килевой качки судна и тем самым предоставления данных об угле килевой качки.
19. Способ по любому из предыдущих пунктов, отличающийся тем, что включает этап выполнения нескольких измерений осадки судна во время загрузки или разгрузки судна для предоставления измерений осадки судна в режиме реального времени или почти в реальном времени.
20. Система определения осадки судна, при этом система содержит:
по меньшей мере одно устройство оптического формирования изображений, расположенное на причале, и по меньшей мере одно устройство GNSS или GPS;
при этом система выполнена с возможностью:
измерения осадки судна с использованием по меньшей мере одного устройства оптического формирования изображений для предоставления данных оптического измерения осадки на основе автоматического обнаружения положения по меньшей мере одной марки осадки на корпусе судна;
использования данных оптического измерения осадки для инициализации данных высотного измерения осадки, предоставленных по меньшей мере одним устройством GNSS или GPS; и
использования данных высотного измерения осадки для предоставления по меньшей мере одного измерения осадки судна после этапа инициализации данных высотного измерения осадки.
21. Система по по п. 20, отличающаяся тем, что указанная система дополнительно содержит блок обработки данных, и при этом измерение осадки судна с использованием по меньшей мере одного устройства оптического формирования изображений для предоставления данных оптического измерения осадки дополнительно включает:
захват оптического изображения по меньшей мере одной марки осадки на корпусе судна;
эксплуатацию блока обработки данных для выполнения обработки оптического изображения посредством оптического распознавания знаков (OCR) для предоставления данных OCR для по меньшей мере одной марки осадки; и
указанную обработку данных OCR для предоставления данных оптического измерения осадки.
22. Система по п. 21, отличающаяся тем, что дополнительно выполнена с возможностью:
определения расположения в пространстве декартовых координат по меньшей мере одной марки осадки; и
использования данных OCR и расположения в пространстве декартовых координат по меньшей мере одной марки осадки при определении данных оптического измерения осадки для осадки судна.
23. Система по п. 22, отличающаяся тем, что дополнительно выполнена с возможностью получения данных о приливе и вычитания данных о приливе из расположения марки осадки в пространстве декартовых координат для определения высоты марки осадки над приливом; и
вычитания высоты марки осадки над приливом из числового значения марки осадки для получения измерения осадки судна.
24. Система по любому из пп. 20-23, отличающаяся тем, что измерение осадки судна с использованием по меньшей мере одного устройства оптического формирования изображений для предоставления данных оптического измерения осадки дополнительно включает:
эксплуатацию измерительного устройства для измерения расстояния между по меньшей мере одной точкой на корпусе судна и по меньшей мере одним устройством оптического формирования изображений; и
измерение относительного угла между первым и вторым положениями оптической оси устройства оптического формирования изображений, при этом первое положение является заданным положением, и второе положение является положением устройства оптического формирования изображений, когда измеряют расстояние между устройством оптического формирования изображений и по меньшей мере одной точкой на корпусе.
25. Система по п. 24, отличающаяся тем, что указанная система дополнительно содержит поворотно-наклонную платформу, на которой установлено указанное по меньшей мере одно устройство оптического формирования изображений, и лазерное дальномерное устройство, расположенное смежно с указанным по меньшей мере одним устройством оптического формирования изображений;
и при этом указанная система дополнительно выполнена с возможностью:
эксплуатации лазерного дальномерного устройства для измерения расстояния между по меньшей мере одним устройством оптического формирования изображений и по меньшей мере одной точкой на корпусе судна;
эксплуатации поворотно-наклонного блока для перемещения устройства оптического формирования изображений между по меньшей мере первым заданным положением и вторым положением, в котором измеряют указанное расстояние между указанным устройством оптического формирования изображений и указанной по меньшей мере одной точкой на корпусе; и
эксплуатации поворотно-наклонной платформы для измерения относительного угла между по меньшей мере первым заданным положением и вторым положением.
26. Система по п. 25, отличающаяся тем, что
в первом положении оптическая ось по меньшей мере одного устройства оптического формирования изображений является по существу перпендикулярной продольной оси причала, на котором или смежно с которым расположено устройство оптического формирования изображений; и
при этом измерение относительного угла между первым положением и вторым положением включает измерение относительного угла в горизонтальной плоскости и вертикальной плоскости.
27. Система по любому из пп. 24 или 25, отличающаяся тем, что дополнительно выполнена с возможностью получения по меньшей мере одного измерения расстояния между устройством оптического формирования изображений и корпусом и соответствующего измерения относительного угла между первым положением и вторым положением, в котором измеряют указанное расстояние, в результате чего путем указанного по меньшей мере одного измерения создается набор данных из трехмерных данных расположения по меньшей мере одной точки на поверхности корпуса судна по меньшей мере вблизи от одного набора марок осадки.
28. Система по п. 27, отличающаяся тем, что выполнена с возможностью использования набора данных из трехмерных данных по меньшей мере одной точки на поверхности корпуса при определении ширины корпуса судна между соответствующими марками осадки на левой и правой сторонах корпуса судна.
29. Система по любому из пп. 24-28, отличающаяся тем, что дополнительно выполнена с возможностью коррекции по меньшей мере одного изображения корпуса, содержащего по меньшей мере один набор марок осадки, на относительный угол между положением устройства оптического формирования изображений, в котором было получено указанное изображение, и заданным первым положением.
30. Система по любому из пп. 20-28, отличающаяся тем, что дополнительно выполнена с возможностью:
эксплуатации по меньшей мере одного устройства оптического формирования изображений для получения по меньшей мере одного изображения, содержащего по меньшей мере один набор марок осадки на корпусе судна; и
коррекции указанного изображения на относительный угол между первым заданным положением указанного устройства оптического формирования изображений и вторым положением, в котором указанное изображение было захвачено указанным устройством оптического формирования изображений, тем самым создавая по меньшей мере одно откорректированное изображение; и
выполнения оптического распознавания знаков в отношении указанного по меньшей мере одного откорректированного изображения.
31. Система по любому из пп. 20-30, отличающаяся тем, что дополнительно выполнена с возможностью:
преобразования указанного изображения, в результате чего все точки на корпусе судна кажутся равноудаленными от точки наблюдения устройства оптического формирования изображений.
32. Система по любому из пп. 20-31, отличающаяся тем, что дополнительно выполнена с возможностью преобразования по меньшей мере одного изображения таким образом, чтобы:
i) казалось, будто оно получено устройством оптического формирования изображений, расположенным в точке наблюдения, которая:
a) перпендикулярна продольной оси причала, у которого поставлено указанное судно; и
b) находится на бесконечном расстоянии от корпуса судна, и
ii) казалось, будто указанное устройство оптического формирования изображений, расположенное в указанной точке наблюдения, работает с бесконечным увеличением при захвате указанного по меньшей мере одного изображения.
33. Система по любому из пп. 31 или 32, отличающаяся тем, что дополнительно выполнена с возможностью преобразования изображения таким образом, чтобы казалось, будто все лучи света, которые образуют изображение, параллельны друг другу и перпендикулярны плоскости, в которой образовано изображение.
34. Система по любому из пп. 20-33, отличающаяся тем, что дополнительно выполнена с возможностью приема данных о высоте от по меньшей мере одного устройства GNSS или GPS, расположенного на судне, для измерения высоты судна и использования данных о высоте для определения данных высотного измерения осадки судна.
35. Система по любому из пп. 20-34, отличающаяся тем, что дополнительно выполнена с возможностью:
приема данных от по меньшей мере двух устройств GNSS или GPS, размещенных на судне таким образом, что по меньшей мере одно устройство GNSS или GPS расположено на левой стороне указанного судна, и по меньшей мере одно устройство GNSS или GPS расположено на правой стороне указанного судна, для предоставления данных о высоте левого борта и данных о высоте правого борта; и
обработки данных о высоте левого борта и данных о высоте правого борта для определения угла крена судна и для предоставления данных об угле крена.
36. Система по п. 35, отличающаяся тем, что дополнительно выполнена с возможностью использования данных об угле крена и оптических данных осадки с причальной стороны судна для определения данных измерения осадки для океанской стороны судна.
37. Система по любому из пп. 35 или 36, отличающаяся тем, что дополнительно выполнена с возможностью:
расположения по меньшей мере двух устройств GNSS или GPS в отдельных местах, расположенных на расстоянии друг от друга в продольном направлении корпуса, для предоставления данных о высоте в носовой части и данных о высоте в кормовой части; и
обработки данных о высоте в носовой части и данных о высоте в кормовой части для определения угла килевой качки судна.
38. Система по любому из пп. 20-37, отличающаяся тем, что дополнительно выполнена с возможностью выполнения нескольких измерений осадки судна во время загрузки или разгрузки для предоставления измерения осадки судна в режиме реального времени или почти в реальном времени.
39. Способ определения осадки судна с использованием по меньшей мере одного устройства оптического формирования изображений, включающий:
эксплуатацию устройства оптического формирования изображений для захвата оптического изображения по меньшей мере одной марки осадки на корпусе судна;
выполнение обработки оптического изображения посредством оптического распознавания знаков (OCR) для предоставления данных OCR для по меньшей мере одной марки осадки;
определение расположения в пространстве декартовых координат по меньшей мере одной марки осадки;
использования данных OCR и расположения в пространстве декартовых координат по меньшей мере одной марки осадки при определении данных оптического измерения осадки для осадки судна.
40. Способ по п. 39, отличающийся тем, что дополнительно включает:
измерение расстояния между по меньшей мере одной точкой на корпусе судна и по меньшей мере одним устройством оптического формирования изображений; и
измерения относительного угла между первым и вторым положениями оптической оси устройства оптического формирования изображений, при этом первое положение является заданным положением, и второе положение является положением устройства оптического формирования изображений, когда измеряют расстояние между устройством оптического формирования изображений и по меньшей мере одной точкой на корпусе.
41. Способ по п. 40, отличающийся тем, что дополнительно включает этап получения данных о приливе и вычитания данных о приливе из расположения марки осадки в пространстве декартовых координат для определения высоты марки осадки над приливом; и
вычитания высоты марки осадки над приливом из числового значения марки осадки для получения измерения осадки судна.
42. Способ по любому из пп. 40 или 41, отличающийся тем, что по меньшей мере одно устройство оптического формирования изображений расположено на поворотно-наклонной платформе, и по меньшей мере одно лазерное дальномерное устройство расположено смежно с по меньшей мере одним устройством оптического формирования изображений;
и при этом способ включает:
эксплуатацию лазерного дальномерного устройства для измерения расстояния между по меньшей мере одним устройством оптического формирования изображений и указанной по меньшей мере одной точкой на корпусе судна;
и использование поворотно-наклонной платформы для перемещения устройства оптического формирования изображений во второе положение, и использование указанной поворотно-наклонной платформы для измерения относительного угла между указанным первым положением и указанным вторым положением.
43. Способ по п. 42, отличающийся тем, что:
в первом положении оптическая ось устройства оптического формирования изображений является по существу перпендикулярной продольной оси причала, на котором или смежно с которым расположено указанное устройство оптического формирования изображений;
и при этом измерение относительного угла между указанным первым положением и указанным вторым положением включает измерение относительного угла в горизонтальной плоскости и вертикальной плоскости.
44. Способ по любому из пп. 40-43, отличающийся тем, что дополнительно включает этап:
использования измерений:
i) расстояния между устройством оптического формирования изображений и корпусом; и
ii) относительного угла между первым положением и вторым положением,
для создания набора трехмерных данных расположения по меньшей мере одной точки на поверхности корпуса по меньшей мере вблизи от одного набора марок осадки.
45. Способ по любому из пп. 40-44, отличающийся тем, что дополнительно включает этап использования:
i) измерений расстояния между устройством оптического формирования изображений и корпусом; и
ii) относительного угла между первым положением и вторым положением,
для определения ширины корпуса судна между соответствующими марками осадки на левой и правой сторонах корпуса судна.
46. Способ по любому из пп. 40-45, отличающийся тем, что дополнительно включает этап выполнения преобразования по меньшей мере одного изображения, содержащего по меньшей мере один набор марок осадки; при этом при преобразовании используют относительный угол между вторым положением, в котором указанное изображение было захвачено устройством оптического формирования изображений, и указанным первым положением.
47. Способ по любому из пп. 40-46, отличающийся тем, что дополнительно включает этапы:
получения по меньшей мере одного изображения, содержащего по меньшей мере один набор марок осадки;
коррекции указанного изображения на относительный угол между вторым положением, в котором указанное изображение было захвачено устройством оптического формирования изображений, и указанным первым положением для создания откорректированного изображения; и
выполнения оптического распознавания знаков в отношении указанного откорректированного изображения.
48. Способ по любому из пп. 39-47, отличающийся тем, что дополнительно включает этап:
преобразования указанного изображения таким образом, чтобы казалось, будто корпус судна расположен в вертикальной плоскости, в результате чего все точки на корпусе судна кажутся равноудаленными от точки наблюдения устройства оптического формирования изображений.
49. Способ по п. 48, отличающийся тем, что преобразование выполняют для преобразования изображения таким образом, чтобы казалось, будто оно получено устройством оптического формирования изображений:
i) расположенным в точке наблюдения, которая:
a) перпендикулярна продольной оси причала, у которого поставлено указанное судно, и
b) находится на бесконечном расстоянии от корпуса судна, и
ii) работающим с бесконечным увеличением.
50. Способ по любому из пп. 48 или 49, отличающийся тем, что преобразование выполняют для преобразования изображения таким образом, чтобы казалось, будто все лучи света, которые образуют изображение, параллельны друг другу и перпендикулярны плоскости, в которой образуют изображение.
51. Способ по любому из пп. 39-50, отличающийся тем, что дополнительно включает этап измерения осадки судна с использованием данных о высоте, предоставленных по меньшей мере одним устройством GNSS или GPS, для предоставления данных высотного измерения осадки; и
использования данных высотного измерения осадки и данных оптического измерения осадки для определения осадки судна.
52. Способ по п. 51, отличающийся тем, что дополнительно включает этап использования данных высотного измерения осадки для подтверждения данных оптического измерения осадки, на основании которых в случае подтверждения определяют осадку судна.
53. Способ по любому из пп. 51 или 52, отличающийся тем, что дополнительно включает этапы:
размещения по меньшей мере двух устройств GNSS или GPS на указанном судне в положениях, смещенных в боковом направлении относительно продольной оси указанного судна;
измерения данных о высоте на указанных по меньшей мере двух устройствах GNSS или GSP; и
использования данных о высоте для определения угла крена судна и тем самым предоставления данных об угле крена.
54. Способ по п. 53, отличающийся тем, что включает этап использования данных об угле крена и оптических данных осадки для определения измерения осадки судна для океанской стороны судна.
55. Способ по любому из пп. 53 или 54, отличающийся тем, что дополнительно включает этап использования данных о высоте от по меньшей мере двух устройств GNSS или GPS для определения угла килевой качки судна и тем самым предоставления данных об угле килевой качки.
56. Способ по любому из пп. 39-55, отличающийся тем, что дополнительно включает этап выполнения нескольких измерений осадки судна с использованием как данных высотного измерения осадки, так и данных оптического измерения осадки во время загрузки или разгрузки судна для предоставления измерений осадки судна в режиме реального времени или почти в реальном времени.
| US 2009112510 A1, 30.04.2009 | |||
| CN 102975826 A, 20.03.2013 | |||
| СПОСОБ ПОЛУЧЕНИЯ АЛКИЛФЕНОЛОВ | 0 |
|
SU240715A1 |
| СПОСОБ АРГУМЕНТИРОВАННОГО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОТМЕТОК ОСАДКИ СУДНА | 2007 |
|
RU2363611C2 |

