Изобретение относится к области измерительной техники, а именно к устройствам для измерения переменных магнитных полей, в частности к устройствам для высокоточного измерения пространственных компонент вектора индукции магнитного поля с помощью индукционных датчиков.
Известен трехкоординатный магнитометр, в задачи которых входят юстировка взаимной перпендикулярности осей датчика и определения дрейфа нуль-пункта (патент RU №2229727, от 27.11.2002). Известны патенты, когда в трехкоординатном магнитометре задачи устранения помех решаются в процессе его калибровки (RU 2497139, от 18.05.2012). Так, например, в патенте RU №2290657 от 09.08.2005 г., калибровка осуществляется с помощью эталонной меры магнитного момента (магнитного диполя).
Наиболее близким по технической сущности является трехкоординатный магнитометр, калибровка которого осуществляется с помощью трехкомпонентной меры магнитной индукции (патент RU №2229727, от 27. 11.2002 г.).
Недостатком известных трехкоординатных магнитометров является постепенное снижение точности, стабильности и надежности работы, так как калибровка осуществляется перед началом эксплуатации датчика или проводится с некоторой периодичностью в процессе эксплуатации. В этом случае непосредственно во время эксплуатации возможно воздействия различных внешних факторов на сам датчик, которые могут существенно изменить его характеристики. Наиболее подверженным внешним влияниям является магнитная проницаемость ферромагнитного сердечника катушки индуктивности, которая существенным образом зависит от воздействия внешнего постоянного магнитного поля, наличия вблизи датчика ферромагнитных предметов, от температуры внешней среды.
Техническим результатом предлагаемого устройства является повышение точности, стабильности и надежности работы трехкоординатного индукционного магнитометра за счет постоянной самокалибровки индукционных датчиков магнитометра непосредственно в процессе его эксплуатации.
Технический результат достигается тем, что в отличие от известного устройства, содержащего трехкоординатный индукционный магнитометр, состоящий из шести идентичных индукционных датчиков со стержневыми ферритовыми сердечниками, причем датчики попарно соединены последовательно и расположены вдоль трех взаимно перпендикулярных осей с центральной геометрической симметрией, центр которой совпадает с магнитным центром магнитометра, дополнительно введена внутренняя трехкомпонентная мера магнитной индукции, состоящая из диэлектрического куба, центр которого совмещен с центром магнитометра, а ребра куба параллельны его осям, с нанесенными на каждую грань куба вокруг оси индукционного датчика катушки индуктивности, по меньшей мере, с одним витком.
Сущность изобретения заключается в том, что для самокалибровки магнитометра дополнительно в центре него установлен диэлектрик, выполненный в виде куба, а ребра куба параллельны осям магнитометра, на каждой грани куба вокруг оси индукционного датчика нанесена катушка индуктивности, по меньшей мере, с одним витком. Куб служит для фиксации катушки индуктивности, а материал из диэлектрика выбран для исключения влияния на магнитное поле. Катушки индуктивности служат для формирования собственного калибровочного магнитного поля.
Диэлектрический куб с нанесенными катушками индуктивности образуют меру магнитной индукции с известными параметрами и может использоваться для калибровки трехкоординатного магнитометра.
Поясним возможность калибровки. Диаметр однослойной катушки и ее расположение на диэлектрическом материале относительно ферромагнитного сердечника индукционного датчика таковы, что влиянием параметров сердечника на индуктивность меры магнитной индукции можно пренебречь. В этом случае магнитное поле, создаваемое каждой одновитковой катушкой индуктивности в центре витка, будет равно
где R - радиус витка, μ0=4π⋅-7 Гн/м - магнитная постоянная, Im - амплитуда переменного калибровочного тока [Иродов И.Е. Основные законы электромагнетизма. М.: Высш. шк., 1991, стр. 139]. Например, при радиусе витка R=5⋅10-3 м и силе тока Im=10-4 А с частотой 103 Гц амплитуда индукции Bm калибровочного магнитного поля будет равна 125,7⋅10-9 Тл, что уверенно может быть измерено индукционным датчиком. Например, при чувствительности датчика 10-11 Тл [Голев КМ. Трехкоординатный индукционный датчик переменного магнитного поля для магнитометрических систем навигации // И.М. Голев, Т.Н. Заенцева, Е.А. Никитина и др. Воздушно-космические силы. Теория и практика. №12, 2019, С. 91-100], точность оценки коэффициента преобразования индукционным датчиком может быть не менее 0,1%.
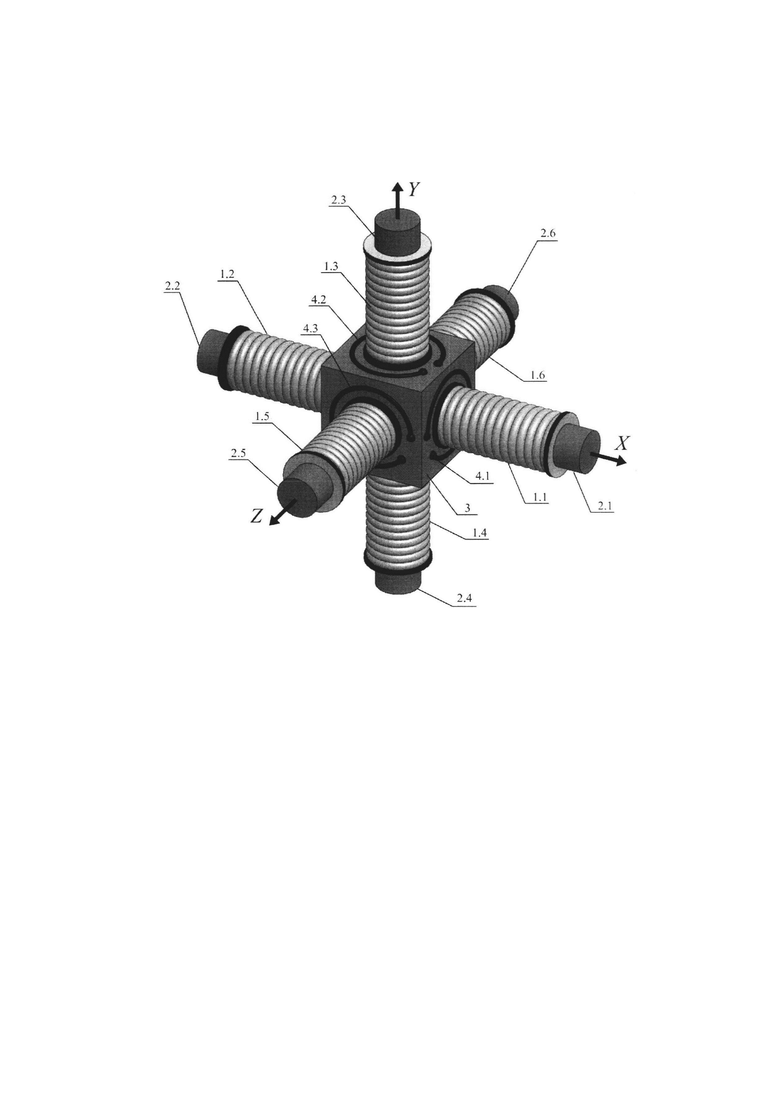
Структура предлагаемого устройства приведена на фигуре, где введены обозначения: 1 - индукционный датчик; 2 - стержневой ферритовый сердечник; XYZ - трехкоординатная система; 3 - диэлектрический куб; 4 -плоская катушка индуктивности.
Индукционные датчики 1.1, 1.2, 1.3, 1.4, 1.5, 1.6 каждой оси намотаны на соответствующие ферритовые сердечники 2.1, 2.2, 2.3, 2.4, 2.5, 2.6, соединены последовательно и жестко зафиксированы с центральным диэлектрическим кубом 3. На все грани куба 3 нанесены плоские катушки индуктивности 4 (на фигуре представлены катушки 4.1, 4.2 и 3.3. Катушки 4.4, 4.5 и 4.6 не представлены, так как не видны). Куб 3 с плоскими катушками 4 представляет собой внутреннюю трехкомпонентную меру магнитной индукции.
Работа магнитометра аналогична работе прототипа с некоторым отличием, связанным с калибровкой индукционных датчиков магнитометра непосредственно в процессе его эксплуатации.
Перед применением устройства проводится его калибровка с помощью внешней меры магнитной индукции или с помощью магнитного диполя.
После этой калибровки проводится калибровка с помощью внутренней трехкомпонентной меры магнитной индукции. Для этого последовательно все шесть катушек индуктивности 4 создают внутреннее эталонное переменное магнитное поле с помощью калибровочного тока, протекающего через соответствующие катушки 4. При этом производится измерение величины амплитуды этих магнитных полей трехкоординатным индукционным магнитометром. Например, поле плоской катушки 4.1 измеряется датчиком 1.1, катушки 4.2 - датчиком 1.3 и так далее. Эти измеренные значения запоминаются и считаются исходными, имея в виду, что на данный момент трехкоординатный индукционный магнитометр был уже откалиброван с помощью внешней трехкомпонентной меры магнитной индукции.
В процессе эксплуатации трехкоординатного индукционного магнитометра периодически проводится его самокалибровка. Для этого результаты периодических измерений калибровочного магнитного поля, создаваемого внутренней мерой индукции, сравниваются с исходными и при необходимости производится корректировка коэффициента преобразования каждого из шести индукционных датчиков, например, путем учета при дальнейших математических вычислениях.
Этим достигается указанный в изобретении технический результат.
Если обнаруживается существенное изменение параметров индукционного датчика, то тогда делается вывод о невозможности его эксплуатации.
Куб должен быть выполнен из диэлектрического немагнитного материала с низким температурным коэффициентом линейного расширения и с высокими механическими свойствами, например из ситалла. В настоящее время технологически достижимы точность линейных размеров ±0,03 мм, точность углов ±3 угловых секунды [https://oltech.ru/catalog/prizmy-i-kubiki/]. Индукционный датчик трехкоординатного индукционного магнитометра выполнен в виде катушки индуктивности.
Таким образом, предлагаемое устройство обеспечивает повышение точности, стабильности и надежности работы трехкоординатного индукционного магнитометра за счет постоянной самокалибровки индукционных датчиков магнитометра непосредственно в процессе его эксплуатации.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОЙ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПОДЗЕМНЫХ ТРУБОПРОВОДОВ С ВОЗМОЖНОСТЬЮ КАЛИБРОВКИ В ПОЛЕВЫХ УСЛОВИЯХ | 2016 |
|
RU2620326C1 |
| СПОСОБ КАЛИБРОВКИ ТРЕХКОМПОНЕНТНОГО МАГНИТОМЕТРА | 2012 |
|
RU2497139C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ХАРАКТЕРИСТИКИ ПРЕОБРАЗОВАНИЯ ТРЕХКОМПОНЕНТНОГО МАГНИТОМЕТРА | 2011 |
|
RU2481593C9 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОСТОЯННЫХ ПО МАГНИТНОЙ ИНДУКЦИИ ОБМОТОК ТРЕХКОМПОНЕНТНОГО МАГНИТОМЕТРА | 2005 |
|
RU2282205C1 |
| Трехкомпонентная мера магнитного момента | 2024 |
|
RU2824326C1 |
| ФЕРРОЗОНДОВЫЙ МАГНИТОМЕТР И СПОСОБ ИЗМЕРЕНИЯ КОМПОНЕНТ ИНДУКЦИИ МАГНИТНОГО ПОЛЯ ПРИ ПОМОЩИ ВЕКТОРНОЙ КОМПЕНСАЦИИ | 2013 |
|
RU2539726C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И ОРИЕНТАЦИИ ТРЕХКОМПОНЕНТНОГО ДАТЧИКА МАГНИТОМЕТРА ОТНОСИТЕЛЬНО МЕРЫ МАГНИТНОГО МОМЕНТА | 2005 |
|
RU2290657C1 |
| Способ диагностики технического состояния подземных трубопроводов | 2016 |
|
RU2630856C1 |
| СПОСОБ РЕГИСТРАЦИИ МАГНИТНОЙ ИНДУКЦИИ МАГНИТНОГО ПОЛЯ | 2006 |
|
RU2337371C2 |
| СПОСОБ ИЗМЕРЕНИЯ ПРИРАЩЕНИЯ ИНДУКЦИИ МАГНИТНОГО ПОЛЯ ТРЕХКОМПОНЕНТНЫМ ДИФФЕРЕНЦИАЛЬНЫМ МАГНИТОМЕТРОМ | 2006 |
|
RU2313801C1 |
Изобретение относится к области измерительной техники, а именно к устройствам для измерения переменных магнитных полей, в частности к устройствам для высокоточного измерения пространственных компонент вектора индукции магнитного поля с помощью индукционных датчиков. Трехкоординатный индукционный магнитометр с самокалибровкой состоит из шести идентичных индукционных датчиков со стержневыми ферритовыми сердечниками, причем датчики попарно соединены последовательно и расположены вдоль трех взаимно перпендикулярных осей с центральной геометрической симметрией, центр которой совпадает с магнитным центром магнитометра. Дополнительно введена внутренняя трехкомпонентная мера магнитной индукции, состоящая из диэлектрического куба, центр которого совмещен с центром магнитометра, а ребра куба параллельны его осям, с нанесенными на каждую грань куба вокруг оси индукционного датчика катушками индуктивности, по меньшей мере, с одним витком. Технический результат: повышение точности, стабильности и надежности работы трехкоординатного индукционного магнитометра. 1 ил.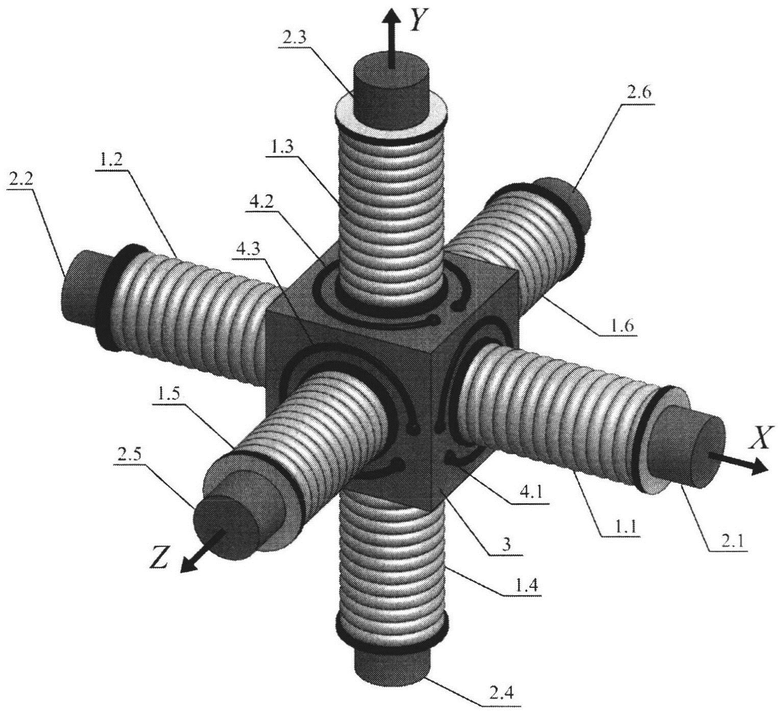
Трехкоординатный индукционный магнитометр с самокалибровкой, состоящий из шести идентичных индукционных датчиков со стержневыми ферритовыми сердечниками, причем датчики попарно соединены последовательно и расположены вдоль трех взаимно перпендикулярных осей с центральной геометрической симметрией, центр которой совпадает с магнитным центром магнитометра, отличающийся тем, что дополнительно введена внутренняя трехкомпонентная мера магнитной индукции, состоящая из диэлектрического куба, центр которого совмещен с центром магнитометра, а ребра куба параллельны его осям, с нанесенными на каждую грань куба вокруг оси индукционного датчика катушками индуктивности, по меньшей мере, с одним витком.
| JP 2014085176 A, 12.05.2014 | |||
| УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОЙ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПОДЗЕМНЫХ ТРУБОПРОВОДОВ С ВОЗМОЖНОСТЬЮ КАЛИБРОВКИ В ПОЛЕВЫХ УСЛОВИЯХ | 2016 |
|
RU2620326C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КАЛИБРОВОЧНОЙ МАТРИЦЫ ТРЕХКОМПОНЕНТНОГО МАГНИТОМЕТРА (ВАРИАНТЫ) | 2003 |
|
RU2262711C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2005 |
|
RU2285931C1 |

