ОБЛАСТЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
[0001] Настоящее изобретение относится к области технологий измерения проходки, и в частности, к методу измерения проходки для проходческого комбайна, с использованием лазерного датчика и датчика ориентации.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
[0002] Проходка тоннеля - это длина проезда, который прокладывается при проходке тоннелей для различных проездов и залов, а также представляет собой экономический и технический показатель в производственных статистических данных. Соотношение производственной проходки тоннеля к производительности шахты отражает то, насколько хорошо согласованы производственная проходка тоннеля и разработка.
[0003] Условия работы в проходческом забое сложны и изменчивы. В настоящее время, проходки тоннеля рассчитываются, главным образом, путем ручного измерения. С одной стороны, присутствуют такие проблемы, как длительная задержка измерения и путаница с недействительными данными по проходке. С другой стороны, когда работники производят измерение под землей, то им приходится сталкиваться с относительно суровыми условиями и сильной запыленностью на проезде для проходки тоннеля, при этом трудоемкость во время измерения проходки тоннеля является высокой.
[0004] Следовательно, ввиду проблем, изложенных выше, необходимо предложить метод, пригодный к использованию для точного измерения проходки тоннеля, чтобы обеспечить соответствие производственным требованиям по безопасности в шахтах.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0005] С этой целью, по настоящему изобретению раскрывается метод измерения проходки для проходческого комбайна. Проходка, преодолеваемая проходческим комбайном, автоматически измеряется с помощью устройства измерения расстояния и светоотражающей мишени с высокой точностью измерения. Кроме того, вместе с методом измерения предполагается использовать функцию наведения на мишень, что повышает точность и полноту измерения расстояния.
[0006] Согласно цели настоящего изобретения, предлагается метод измерения проходки для проходческого комбайна, включающий в себя следующие этапы:
[0007] этап 1. установка светоотражающей мишени и устройства измерения расстояния, при этом светоотражающая мишень устанавливается над путем, сопрягаемым с ленточным транспортером двойного назначения, и неподвижна относительного него; устройство измерения расстояния включает в себя лазерный датчик, датчик ориентации, головку штатива двигателя управления и блок обработки данных, головка штатива двигателя управления включает в себя двигатель управления в горизонтальной плоскости, двигатель управления относительно поперечной оси и головку штатива; устройство измерения расстояния устанавливается на ленточном транспортере двойного назначения, а головка штатива двигателя управления настраивается таким образом, чтобы лазерный луч, направляемый лазерным датчиком, образует круг радиусом 5 см, располагающийся в середине светоотражающей мишени;
[0008] этап 2. во время начала работы, определение рабочего режима данного проходческого комбайна на основании расстояния, измеряемого лазерным датчиком, и ускорения, измеряемого датчиком ориентации, а также регистрирование расстояния проходки тоннеля, когда проходческий комбайн работает в режиме проходки тоннеля в первый раз, при этом расстояние проходки тоннеля обозначается как  ;
;
[0009] этап 3. регистрирование количества  возвращаемого света, измеряемого лазерным датчиком (21), и сравнение количества
возвращаемого света, измеряемого лазерным датчиком (21), и сравнение количества  возвращаемого света, измеряемого лазерным датчиком (21), с предварительно установленным пороговым количеством
возвращаемого света, измеряемого лазерным датчиком (21), с предварительно установленным пороговым количеством  возвращаемого света в блоке обработки данных (24), при этом, если измеренное количество возвращаемого света превышает пороговое количество, лазерный луч падает на светоотражающую мишень (1), что обозначается как «попадание в мишень», и выполняется этап 5; в противном случае облучение обозначается как «непопадание в мишень», и выполняется этап 4;
возвращаемого света в блоке обработки данных (24), при этом, если измеренное количество возвращаемого света превышает пороговое количество, лазерный луч падает на светоотражающую мишень (1), что обозначается как «попадание в мишень», и выполняется этап 5; в противном случае облучение обозначается как «непопадание в мишень», и выполняется этап 4;
[0010] этап 4. включение головки штатива двигателя управления для наведения на мишень; Э1. расчет угловых диапазонов  и
и  для горизонтального вращения головки штатива двигателя управления и ее вращения относительно поперечной оси, исходя из расстояния проходки тоннеля
для горизонтального вращения головки штатива двигателя управления и ее вращения относительно поперечной оси, исходя из расстояния проходки тоннеля  в момент до того, как устройство измерения расстояния промахнется мимо мишени, а также длины
в момент до того, как устройство измерения расстояния промахнется мимо мишени, а также длины  и ширины
и ширины  светоотражающей мишени, при этом
светоотражающей мишени, при этом  и
и  ; Э2. расчет количеств
; Э2. расчет количеств  и
и  раз выполнения сканирования для головки штатива в горизонтальном направлении и в направлении относительно поперечной оси, с учетом расчетных угловых диапазонов
раз выполнения сканирования для головки штатива в горизонтальном направлении и в направлении относительно поперечной оси, с учетом расчетных угловых диапазонов  и
и  для горизонтального вращения головки штатива двигателя управления и ее вращения относительно поперечной оси, при этом
для горизонтального вращения головки штатива двигателя управления и ее вращения относительно поперечной оси, при этом  ,
,  ,
,  - это угол разрешения двигателя управления в горизонтальной плоскости, а
- это угол разрешения двигателя управления в горизонтальной плоскости, а  - это угол разрешения двигателя управления относительно поперечной оси; Э3. установление прямоугольной системы координат с использованием положения, в котором луч света падает на светоотражающую мишень в момент до того, как луч света будет направлен мимо мишени, изначально, координаты с положительной величиной по
- это угол разрешения двигателя управления относительно поперечной оси; Э3. установление прямоугольной системы координат с использованием положения, в котором луч света падает на светоотражающую мишень в момент до того, как луч света будет направлен мимо мишени, изначально, координаты с положительной величиной по  -оси идут в горизонтальном направлении вправо, при этом координаты с положительной величиной по
-оси идут в горизонтальном направлении вправо, при этом координаты с положительной величиной по  -оси идут в вертикальном направлении вверх, а головка штатива двигателя управления ищет светоотражающую мишень отдельно по линейным направлениям
-оси идут в вертикальном направлении вверх, а головка штатива двигателя управления ищет светоотражающую мишень отдельно по линейным направлениям  и
и  в системе координат, пока не будет обнаружена светоотражающая мишень в первый раз; Э4. при движении по часовой стрелке и против часовой стрелки, при помощи двигателя управления в горизонтальной плоскости, отдельно выполняется сканирование раз, а также регистрирование количеств
в системе координат, пока не будет обнаружена светоотражающая мишень в первый раз; Э4. при движении по часовой стрелке и против часовой стрелки, при помощи двигателя управления в горизонтальной плоскости, отдельно выполняется сканирование раз, а также регистрирование количеств  и
и  раз выполнения сканирования светоотражающей мишени отдельно по часовой стрелке и против часовой стрелки; и если
раз выполнения сканирования светоотражающей мишени отдельно по часовой стрелке и против часовой стрелки; и если  , то, при движении по часовой стрелке, при помощи двигателя управления в горизонтальной плоскости, сканирование выполняется
, то, при движении по часовой стрелке, при помощи двигателя управления в горизонтальной плоскости, сканирование выполняется  раз; или если
раз; или если  , то, при движении против часовой стрелки, при помощи двигателя управления в горизонтальной плоскости, сканирование выполняется
, то, при движении против часовой стрелки, при помощи двигателя управления в горизонтальной плоскости, сканирование выполняется  раз, при этом, в данном случае, лазерный луч падает в центр светоотражающей мишени в горизонтальном направлении; при движении по часовой стрелке и против часовой стрелки, при помощи двигателя управления относительно поперечной оси, выполняется сканирование раз, а также регистрирование количеств
раз, при этом, в данном случае, лазерный луч падает в центр светоотражающей мишени в горизонтальном направлении; при движении по часовой стрелке и против часовой стрелки, при помощи двигателя управления относительно поперечной оси, выполняется сканирование раз, а также регистрирование количеств  и
и  раз выполнения сканирования светоотражающей мишени отдельно по часовой стрелке и против часовой стрелки; и если
раз выполнения сканирования светоотражающей мишени отдельно по часовой стрелке и против часовой стрелки; и если  , то, при движении по часовой стрелке, при помощи двигателя управления относительно поперечной оси, сканирование выполняется
, то, при движении по часовой стрелке, при помощи двигателя управления относительно поперечной оси, сканирование выполняется  раз; или если
раз; или если  , то, при сканировании против часовой стрелки, при помощи двигателя управления относительно поперечной оси, сканирование выполняется
, то, при сканировании против часовой стрелки, при помощи двигателя управления относительно поперечной оси, сканирование выполняется  раз, при этом, в данном случае, лазерный луч падает в центр светоотражающие мишени в вертикальном направлении; два положения сочетаются, и устройство измерения расстояния направляет луч в центр светоотражающей мишени, чтобы завершить процесс наведения на мишень;
раз, при этом, в данном случае, лазерный луч падает в центр светоотражающие мишени в вертикальном направлении; два положения сочетаются, и устройство измерения расстояния направляет луч в центр светоотражающей мишени, чтобы завершить процесс наведения на мишень;
[0011] этап 5. регистрирование расстояния проходки тоннеля, когда проходческий комбайн (5) находится в режиме проходки тоннеля, для получения проходки тоннеля  =
=  - проходческого комбайна (5), при этом расстояние проходки тоннеля определяется как ; а также
- проходческого комбайна (5), при этом расстояние проходки тоннеля определяется как ; а также
[0012] этап 6. повторение вышеизложенных этапов, чтобы завершить измерение проходки проходческого комбайна.
[0013] В предпочтительном варианте на этапе 1 устройство измерения расстояния дополнительно включает в себя датчик угла, предназначенный для сбора данных о величинах углов в трех осях с лазерного датчика и для корректировки отклонения по расстоянию, а датчик угла устанавливается на головке штатива и точно сопрягается с лазерным датчиком; блок обработки данных принимает и обрабатывает данные, контролируемые лазерным датчиком и датчиком угла, для получения расстояния проходки тоннеля  , при этом
, при этом  - расстояние, измеряемое лазерным датчиком (21) от устройства измерения расстояния до светоотражающей мишени (1), а
- расстояние, измеряемое лазерным датчиком (21) от устройства измерения расстояния до светоотражающей мишени (1), а  - расстояние проходки тоннеля после настройки точности; в данном случае расстояние проходки тоннеля, когда проходческий комбайн (5) находится в режиме проходки тоннеля в первый раз, обозначается как
- расстояние проходки тоннеля после настройки точности; в данном случае расстояние проходки тоннеля, когда проходческий комбайн (5) находится в режиме проходки тоннеля в первый раз, обозначается как  ; тогда расстояние проходки тоннеля, когда проходческий комбайн (5) находится в режиме проходки тоннеля, обозначается как
; тогда расстояние проходки тоннеля, когда проходческий комбайн (5) находится в режиме проходки тоннеля, обозначается как  , а проходка тоннеля составляет:
, а проходка тоннеля составляет:  .
.
[0014] В предпочтительном варианте устройство измерения расстояния дополнительно включает в себя противовзрывной корпус, сервер, дисплей и источник питания постоянного тока; на противовзрывном корпусе располагается множество сигнализаторов, предназначенных для подачи питания и связи с окружающей средой, а в передней части располагается одно стеклянное окно, через которое проходит лазерный луч, направляемый лазерным датчиком на светоотражающую мишень; сервер предназначен для хранения и дальнейшей обработки данных, получаемых блоком обработки данных, а также вывода окончательного результата на дисплей для отображения; дисплей предназначен для отображения проходки и рабочего режима данного проходческого комбайна, статуса светоотражающей мишени, а также данных о величинах углов в трех осях головки штатива; источник питания постоянного тока предназначен для подачи питания на все устройства измерения расстояния.
[0015] В предпочтительном варианте датчик ориентации представляет собой датчик измерения пространственного движения, основанный на технологии МЭМС.
[0016] В предпочтительном варианте головка штатива двигателя управления включает в себя двигатель управления в горизонтальной плоскости, двигатель управления относительно поперечной оси и головку штатива, способную вращаться в горизонтальном направлении и относительно поперечной оси.
[0017] В предпочтительном варианте, на этапе 2, предусматривается пять режимов работы проходческого комбайна: включение питания, проходка тоннеля, движение вперед, движение назад и перемещение пути, сопрягаемого с ленточным транспортером; когда разница в значениях  между расстояниями проходки тоннеля, получаемыми с помощью лазерного датчика в двух точках времени, колеблется в пределах диапазона
между расстояниями проходки тоннеля, получаемыми с помощью лазерного датчика в двух точках времени, колеблется в пределах диапазона  , а ускорение, измеряемое датчиком ориентации, соответствует
, а ускорение, измеряемое датчиком ориентации, соответствует  , то определяется, что проходческий комбайн находится в режиме включения питания; когда значения, получаемые при возврате сигнала лазерного датчика, постепенно увеличиваются,
, то определяется, что проходческий комбайн находится в режиме включения питания; когда значения, получаемые при возврате сигнала лазерного датчика, постепенно увеличиваются,  , а ускорение, измеряемое датчиком ориентации, соответствует
, а ускорение, измеряемое датчиком ориентации, соответствует  , то определяется, что данный проходческий комбайн находится в режиме движения вперед; когда разность в значениях, получаемая при возврате сигнала лазерного датчика, соответствует
, то определяется, что данный проходческий комбайн находится в режиме движения вперед; когда разность в значениях, получаемая при возврате сигнала лазерного датчика, соответствует  , а ускорение, измеряемое датчиком ориентации, соответствует
, а ускорение, измеряемое датчиком ориентации, соответствует  , то определяется, что проходческий комбайн находится в режиме проходки тоннеля; когда значения, получаемые при возврате сигнала лазерного датчика, постепенно уменьшаются,
, то определяется, что проходческий комбайн находится в режиме проходки тоннеля; когда значения, получаемые при возврате сигнала лазерного датчика, постепенно уменьшаются,  , а ускорение, измеряемое датчиком ориентации, соответствует
, а ускорение, измеряемое датчиком ориентации, соответствует  , то определяется, что проходческий комбайн в данное время находится в режиме движения назад; когда разница в значениях, получаемых при возврате сигнала лазерного датчика, соответствует
, то определяется, что проходческий комбайн в данное время находится в режиме движения назад; когда разница в значениях, получаемых при возврате сигнала лазерного датчика, соответствует  , а ускорение, измеряемое датчиком ориентации, соответствует
, а ускорение, измеряемое датчиком ориентации, соответствует  , определяется, что проходческий комбайн в данное время находится в режиме перемещения пути, сопрягаемого с ленточным транспортером, при этом
, определяется, что проходческий комбайн в данное время находится в режиме перемещения пути, сопрягаемого с ленточным транспортером, при этом  и
и  - расстояния проходки тоннеля в двух точках времени,
- расстояния проходки тоннеля в двух точках времени,  - ускорение в реальном времени, измеряемое датчиком ориентации,
- ускорение в реальном времени, измеряемое датчиком ориентации,  и
и  - два пороговых значения ускорения, предварительно установленных в системе, и
- два пороговых значения ускорения, предварительно установленных в системе, и  .
.
[0018] В предпочтительном варианте на этапе 4, количества раз выполнения сканирования увеличиваются до  и
и  , чтобы обеспечить точное сканирование светоотражающей мишени,
, чтобы обеспечить точное сканирование светоотражающей мишени,  , и
, и  , где
, где  - любое целое число от 0 до 5.
- любое целое число от 0 до 5.
[0019] В предпочтительном варианте пороговое начальное количество возвращаемого света обозначается как  ; дополнительно устанавливается значение выбора порогового количества возвращаемого света
; дополнительно устанавливается значение выбора порогового количества возвращаемого света  , и когда измеряемое количество возвращаемого света соответствует
, и когда измеряемое количество возвращаемого света соответствует  , лазерный луч падает на светоотражающую мишень, что обозначается как «попадание в мишень», а пороговое начальное количество возвращаемого света остается
, лазерный луч падает на светоотражающую мишень, что обозначается как «попадание в мишень», а пороговое начальное количество возвращаемого света остается  ; когда измеряемое количество возвращаемого света соответствует
; когда измеряемое количество возвращаемого света соответствует  , для порогового количества возвращаемого света задается значение
, для порогового количества возвращаемого света задается значение  ; измеряемое количество возвращаемого света повторно сравнивается с заданным пороговым количеством возвращаемого света, и если
; измеряемое количество возвращаемого света повторно сравнивается с заданным пороговым количеством возвращаемого света, и если  , то лазерный луч падает на светоотражающую мишень, что обозначается как «попадание в мишень», или, в противном случае, как «непопадание в мишень».
, то лазерный луч падает на светоотражающую мишень, что обозначается как «попадание в мишень», или, в противном случае, как «непопадание в мишень».
[0020] В сравнении с предыдущим уровнем техники, метод измерения проходки для проходческого комбайна, раскрываемый в настоящем изобретении, имеет следующие преимущества:
[0021] (1) Согласно настоящему изобретению, устанавливаются устройство измерения расстояния и светоотражающая мишень, лазерный луч направляется на светоотражающую мишень при помощи лазерного датчика в устройстве измерения расстояния, лазерный луч, отражаемый светоотражающей мишенью, принимается при помощи фотоэлемента лазерного датчика, а время между отправкой и приемом лазерного луча определяется на таймере, чтобы вычислить расстояние  от лазерного датчика до светоотражающей мишени, а также автоматически измерить проходку, преодолеваемую проходческим комбайном.
от лазерного датчика до светоотражающей мишени, а также автоматически измерить проходку, преодолеваемую проходческим комбайном.
[0022] (2) Согласно настоящему изобретению, попадание лазерного луча на мишень может быть определено исходя из количества возвращаемого света, которое измеряется лазерным датчиком после того, как лазерный луч направляется на светоотражающую мишень, чтобы активировать головку штатива двигателя управления, когда требуется произвести наведение на мишень, что повышает точность и полноту измерения расстояния.
[0023] (3) Согласно настоящему изобретению, пороговое количество возвращаемого света в блоке обработки данных может быть задано в реальном времени в соответствии с измеряемым количеством возвращаемого света, что больше подходит для тяжелых условий работы на проходческом забое.
[0024] (4) Согласно настоящему изобретению, предусматривается установка датчика угла. Датчик угла устанавливается на головке штатива и точно сопрягается с лазерным датчиком. Контролируются данные о величинах углов в трех осях  лазерного датчика, и корректируется отклонение по расстоянию, чтобы повысить точность измерения расстояния.
лазерного датчика, и корректируется отклонение по расстоянию, чтобы повысить точность измерения расстояния.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0025] Для более точного описания решений в вариантах осуществления настоящего изобретения или на предыдущем уровне техники далее приведено краткое описание прилагаемых чертежей, необходимых для описания вариантов осуществления или предыдущего уровня техники. Очевидно, что в прилагаемых чертежах в следующем описании показано только несколько вариантов осуществления настоящего изобретения и специалистами в данной области техники могут быть получены другие чертежи на основании этих прилагаемых чертежей без творческих усилий.
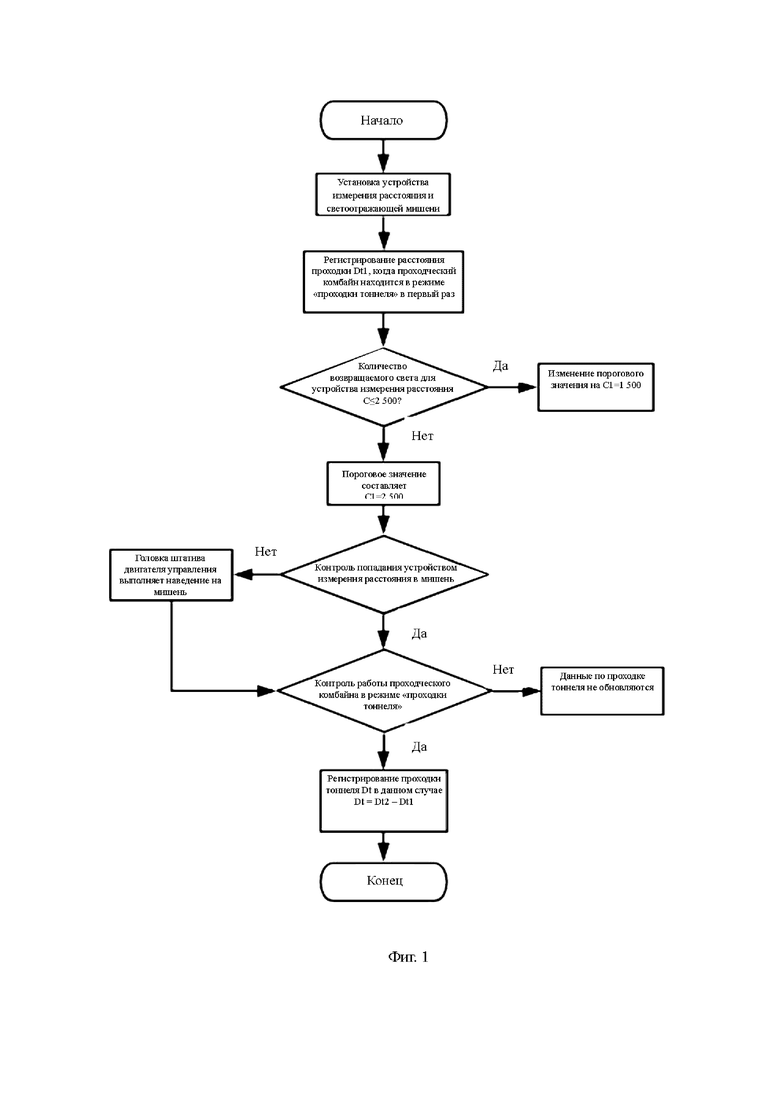
[0026] Фиг. 1 - блок-схема метода измерения проходки для проходческого комбайна по настоящему изобретению;
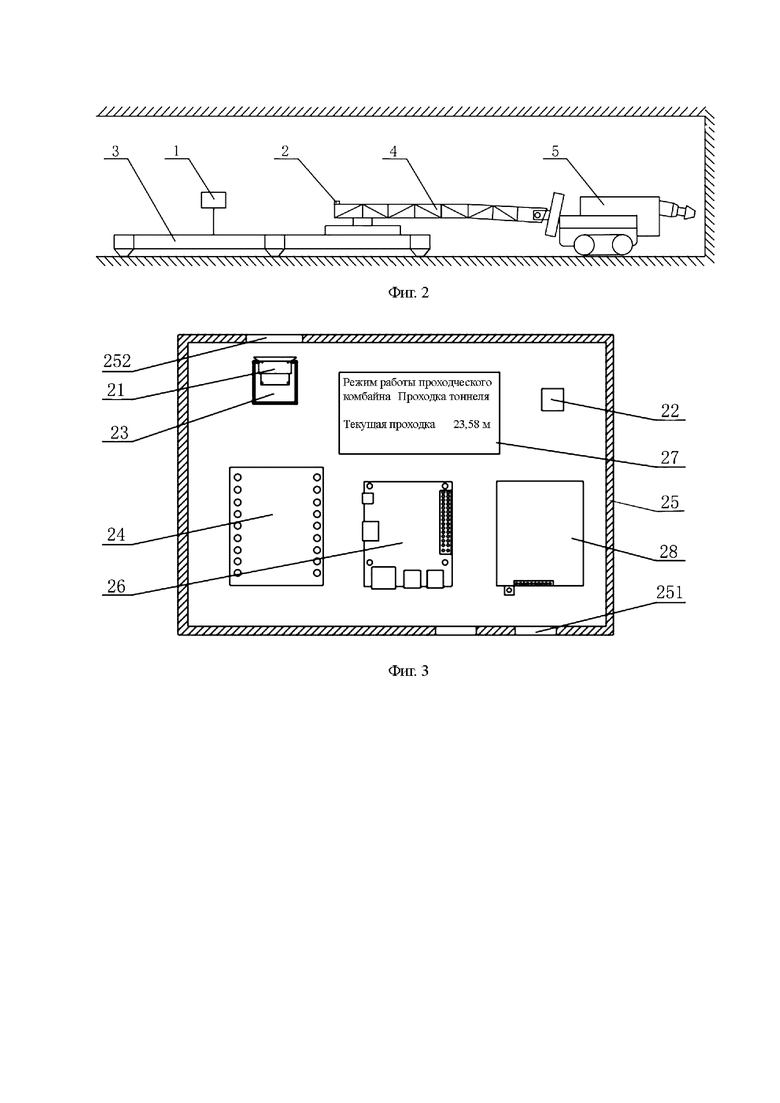
[0027] Фиг. 2 - схема использования метода измерения проходки для проходческого комбайна по настоящему изобретению; а также
[0028] Фиг. 3 - схема внутренней конструкции устройства измерения расстояния, где
[0029] наименования составляющих частей обозначаются следующими номерами или буквами на фигурах:
[0030] 1 - светоотражающая мишень; 2 - устройство измерения расстояния; 21 - лазерный датчик; 22 - датчик ориентации; 23 - головка штатива двигателя управления; 24 - блок обработки данных; 25 - противовзрывной корпус; 251 - сигнализатор; 252 - стеклянное окно; 26 - сервер; 27 - дисплей; 28 - источник питания постоянного тока; 3 - путь, сопрягаемый с ленточным транспортером; 4 - ленточный транспортер двойного назначения; 5 - проходческий комбайн.
ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
[0031] Конкретные варианты осуществления настоящего изобретения кратко описаны ниже, со ссылкой на прилагаемые чертежи. Очевидно, что описываемые варианты осуществления представляют собой лишь некоторые варианты осуществления настоящего изобретения, а не все из них. Все другие варианты осуществления, получаемые специалистом в данной области техники без творческих усилий, и основывающиеся на вариантах осуществления настоящего изобретения, должны укладываться в объем правовой охраны настоящего изобретения.
[0032] На фиг. 1 - фиг. 3 представлены предпочтительные варианты осуществления настоящего изобретения, которые анализируются раздельно, с разных точек зрения.
[0033] Метод измерения проходки для проходческого комбайна, представленный на фиг. 1 и фиг. 2, включает в себя следующие этапы:
[0034] Этап 1. Установка светоотражающей мишени 1 и устройства измерения расстояния 2. Светоотражающая мишень 1 устанавливается над путем 3, сопрягаемым с ленточным транспортером двойного назначения 4, и неподвижна относительного него. Устройство измерения расстояния 2 устанавливается на ленточном транспортере двойного назначения 4, а головка штатива двигателя управления 23 настраивается таким образом, чтобы лазерный луч, направляемый лазерным датчиком 21, образует круг радиусом 5 см, располагающийся в середине светоотражающей мишени 1.
[0035] Светоотражающая мишень 1 представляет собой прямоугольник длиной  и шириной
и шириной  , и предназначен для отражения лазерного луча, направляемого устройством измерения расстояния 2, чтобы увеличить количество возвращаемого света для увеличения расстояния измерения и точности измерения лазерного датчика 21. Наконец, получается расстояние между устройством измерения расстояния 2 и светоотражающей мишенью 1.
, и предназначен для отражения лазерного луча, направляемого устройством измерения расстояния 2, чтобы увеличить количество возвращаемого света для увеличения расстояния измерения и точности измерения лазерного датчика 21. Наконец, получается расстояние между устройством измерения расстояния 2 и светоотражающей мишенью 1.
[0036] Как представлено на фиг. 3, устройство измерения расстояния 2 включает в себя противовзрывной корпус 25 и лазерный датчик 21, датчик ориентации 22, датчик угла, головку штатива двигателя управления 23, блок обработки данных 24, сервер 26, источник питания постоянного тока 28 и дисплей 27, располагающиеся в противовзрывном корпусе 25.
[0037] На противовзрывном корпусе 25 располагается множество сигнализаторов 251, предназначенных для подачи питания и связи с окружающей средой, а в передней части противовзрывного корпуса 25 располагается одно стеклянное окно 252, через которое проходит лазерный луч, направляемый лазерным датчиком 21 на светоотражающую мишень 1.
[0038] Лазерный датчик 21 устанавливается на головке штатива двигателя управления 23, и вращается вместе с ней. Лазерный датчик 21 направляет очень тонкий лазерный луч на цель во время работы. После того, как лазерный луч отражается от светоотражающей мишени 1, фотоэлемент лазерного датчика 21 принимает отражаемый лазерный луч. Таймер лазерного датчика 21 определяет время между отправкой и приемом лазерного луча, чтобы вычислить расстояние от лазерного датчика 21 до цели и измерить количество возвращаемого света.
[0039] Датчик ориентации 22 представляет собой датчик измерения пространственного движения, основанный на технологии МЭМС, и предназначен для измерения данных, таких как ускорение в трех осях, гироскопия в трех осях или угол в трех осях проходческого комбайна 5.
[0040] Датчик угла устанавливается на головке штатива, точно сопрягается с лазерным датчиком 21, и предназначен для сбора данных о величинах углов в трех осях с лазерного датчика 21 и для корректировки отклонения по расстоянию, для получения расстояния проходки тоннеля , при этом - расстояние, измеряемое лазерным датчиком (21) от устройства измерения расстояния до светоотражающей мишени 1, а - расстояние проходки тоннеля после настройки точности
[0041] Головка штатива двигателя управления 23 включает в себя двигатель управления в горизонтальной плоскости, двигатель управления относительно поперечной оси и головку штатива, способную вращаться в горизонтальном направлении и относительно поперечной оси.
[0042] На блоке обработки данных 24 используется Arduino для получения расстояния и информации о количестве возвращаемого света с лазерного датчика 21. Датчик ориентации 22 возвращает ряд групп данных по ускорению, гироскопии и углу, а также данные о величинах углов в трех осях с лазерного датчика 21, измеряемые датчиком угла, а также производит обработку с настройкой точности, для получения точной проходки тоннеля и рабочего режима проходческого комбайна 5.
[0043] Сервер 26 предназначен для хранения и дальнейшей обработки данных, получаемых блоком обработки данных 24, а также вывода окончательного результата на дисплей 27.
[0044] Источник питания постоянного тока 28 предназначен для подачи питания на все устройства измерения расстояния 2.
[0045] Дисплей 27 предназначен для отображения проходки и рабочего режима данного проходческого комбайна 5, статуса светоотражающей мишени 1, а также данных о величинах углов в трех осях головки штатива.
[0046] Этап 2. Во время начала работы, определение рабочего режима данного проходческого комбайна 5 на основании расстояния, измеряемого лазерным датчиком 21, и ускорения, измеряемого датчиком ориентации 22, а также регистрирование расстояния проходки тоннеля, когда проходческий комбайн 5 работает в режиме проходки тоннеля в первый раз, и ;
[0047] В частности, предусматривается пять режимов работы проходческого комбайна: включение питания, проходка тоннеля, движение вперед, движение назад и перемещение пути, сопрягаемого с ленточным транспортером. Когда разница в значениях между расстояниями проходки тоннеля, получаемыми с помощью лазерного датчика 21 в двух точках времени, колеблется в пределах диапазона  , а ускорение, измеряемое датчиком ориентации 22, соответствует , то определяется, что данный проходческий комбайн 5 находится в режиме включения питания; когда значения, получаемые при возврате сигнала лазерного датчика 21, постепенно увеличиваются,
, а ускорение, измеряемое датчиком ориентации 22, соответствует , то определяется, что данный проходческий комбайн 5 находится в режиме включения питания; когда значения, получаемые при возврате сигнала лазерного датчика 21, постепенно увеличиваются,  , а ускорение, измеряемое датчиком ориентации 22, соответствует , то определяется, что проходческий комбайн 5 находится в режиме движения вперед; когда разность в значениях, получаемая при возврате сигнала лазерного датчика 21, соответствует
, а ускорение, измеряемое датчиком ориентации 22, соответствует , то определяется, что проходческий комбайн 5 находится в режиме движения вперед; когда разность в значениях, получаемая при возврате сигнала лазерного датчика 21, соответствует  , а ускорение, измеряемое датчиком ориентации 22, соответствует , то определяется, что проходческий комбайн 5 находится в режиме проходки тоннеля; когда значения, получаемые при возврате сигнала лазерного датчика 21, постепенно уменьшаются,
, а ускорение, измеряемое датчиком ориентации 22, соответствует , то определяется, что проходческий комбайн 5 находится в режиме проходки тоннеля; когда значения, получаемые при возврате сигнала лазерного датчика 21, постепенно уменьшаются,  , а ускорение, измеряемое датчиком ориентации 22, соответствует , то определяется, что проходческий комбайн 5 в данное время находится в режиме движения назад; когда разница в значениях, получаемых при возврате сигнала лазерного датчика 21, соответствует
, а ускорение, измеряемое датчиком ориентации 22, соответствует , то определяется, что проходческий комбайн 5 в данное время находится в режиме движения назад; когда разница в значениях, получаемых при возврате сигнала лазерного датчика 21, соответствует  , а ускорение, измеряемое датчиком ориентации 22, соответствует , определяется, что проходческий комбайн 5 в данное время находится в режиме перемещения пути, сопрягаемого с ленточным транспортером, и - расстояния проходки тоннеля в двух точках времени, - ускорение в реальном времени, измеряемое датчиком ориентации, и - два пороговых значения ускорения, предварительно установленных в системе, и .
, а ускорение, измеряемое датчиком ориентации 22, соответствует , определяется, что проходческий комбайн 5 в данное время находится в режиме перемещения пути, сопрягаемого с ленточным транспортером, и - расстояния проходки тоннеля в двух точках времени, - ускорение в реальном времени, измеряемое датчиком ориентации, и - два пороговых значения ускорения, предварительно установленных в системе, и .
[0048] Этап 3. Регистрирование количества возвращаемого света, измеряемого лазерным датчиком 21, и сравнение количества возвращаемого света, измеряемого лазерным датчиком 21, с предварительно установленным пороговым количеством  возвращаемого света в блоке обработки данных 24, при этом, если измеренное количество возвращаемого света соответствует
возвращаемого света в блоке обработки данных 24, при этом, если измеренное количество возвращаемого света соответствует  , лазерный луч падает на светоотражающую мишень 1, что обозначается как «попадание в мишень», выполняется этап 5, а исходное пороговое количество возвращаемого света остается
, лазерный луч падает на светоотражающую мишень 1, что обозначается как «попадание в мишень», выполняется этап 5, а исходное пороговое количество возвращаемого света остается  ; в противном случае, дополнительно устанавливается значение выбора порогового количества возвращаемого света
; в противном случае, дополнительно устанавливается значение выбора порогового количества возвращаемого света  , и когда измеренное количество возвращаемого света соответствует
, и когда измеренное количество возвращаемого света соответствует  , для порогового количества возвращаемого света задается значение
, для порогового количества возвращаемого света задается значение  ; измеряемое количество возвращаемого света повторно сравнивается с заданным пороговым количеством возвращаемого света, и если
; измеряемое количество возвращаемого света повторно сравнивается с заданным пороговым количеством возвращаемого света, и если  , то лазерный луч падает на светоотражающую мишень 1, что обозначается как «попадание в мишень», и выполняется этап 5; в противном случае, облучение обозначается как «непопадание в мишень», и выполняется этап 4.
, то лазерный луч падает на светоотражающую мишень 1, что обозначается как «попадание в мишень», и выполняется этап 5; в противном случае, облучение обозначается как «непопадание в мишень», и выполняется этап 4.
Этап 4. Включение головки штатива двигателя управления 23 для наведения на мишень. Э1. Расчет угловых диапазонов и для горизонтального вращения головки штатива двигателя управления 23 и ее вращения относительно поперечной оси, исходя из расстояния проходки тоннеля в момент до того, как устройство измерения расстояния 2 промахнется мимо мишени, а также длины и ширины светоотражающей мишени 1, при этом и . Э2. Расчет количеств и раз выполнения сканирования для головки штатива в горизонтальном направлении и в направлении относительно поперечной оси, с учетом расчетных угловых диапазонов и для горизонтального вращения головки штатива двигателя управления 23 и ее вращения относительно поперечной оси, при этом , , - это угол разрешения двигателя управления в горизонтальной плоскости, а - это угол разрешения двигателя управления относительно поперечной оси. Чтобы обеспечить попадание в светоотражающую мишень 1, количества раз выполнения сканирования увеличиваются до и , , и , где - любое целое число от 0 до 5. Э3. Установление прямоугольной системы координат с использованием положения, в котором луч света падает на светоотражающую мишень 1 в момент до того, как луч света будет направлен мимо мишени, изначально, координаты с положительной величиной по -оси идут в горизонтальном направлении вправо, координаты с положительной величиной по -оси идут в вертикальном направлении вверх, а головка штатива двигателя управления 23 ищет светоотражающую мишень 1 отдельно по линейным направлениям и в системе координат, пока не будет обнаружена светоотражающая мишень 1 в первый раз. Э4. Двигатель управления в горизонтальной плоскости выполняет сканирование отдельно по часовой стрелке и против часовой стрелки раз, и регистрирует количества и раз выполнения сканирования светоотражающей мишени 1 отдельно по часовой стрелке и против часовой стрелки; и если , то двигатель управления в горизонтальной плоскости выполняет сканирование по часовой стрелке раз; или если , то двигатель управления в горизонтальной плоскости выполняет сканирование против часовой стрелки раз, при этом, в данном случае, лазерный луч падает в центр светоотражающей мишени 1 в горизонтальном направлении; двигатель управления относительно поперечной оси выполняет сканирование по часовой стрелке и против часовой стрелки раз, и регистрирует количества и раз выполнения сканирования светоотражающей мишени 1 отдельно по часовой стрелке и против часовой стрелки; и если , то двигатель управления относительно поперечной оси выполняет сканирование по часовой стрелке раз; или если , то двигатель управления относительно поперечной оси выполняет сканирование против часовой стрелки раз, при этом, в данном случае, лазерный луч падает в центр светоотражающие мишени 1 в вертикальном направлении; два положения сочетаются, и устройство измерения расстояния 2 направляет луч в центр светоотражающей мишени 1, чтобы завершить процесс наведения на мишень.
[0049] Этап 5. Регистрирование расстояния проходки тоннеля, когда проходческий комбайн 5 находится в режиме проходки тоннеля, для получения проходки тоннеля проходческого комбайна 5, при этом расстояние проходки тоннеля определяется как .
[0050] Этап 6. Повторение вышеизложенных этапов, чтобы завершить измерение проходки проходческого комбайна 5.
[0051] В итоге, согласно методу измерения проходки для проходческого комбайна по настоящему изобретению, устанавливаются устройство измерения расстояния и светоотражающая мишень для автоматического измерения проходки проходческого комбайна. Ручное измерение заменяется автоматическим измерением, обеспечивается высокая точность измерения и снижается трудоемкость. Кроме того, попадание лазерного луча на мишень определяется исходя из количества возвращаемого света, измеряемого лазерным датчиком, чтобы активировать, когда требуется, головку штатива двигателя управления для наведения на мишень, что повышает точность и полноту измерения расстояния.
[0052] Описание раскрытых вариантов осуществления выше позволяет специалисту реализовать и использовать настоящее изобретение. Различные модификации настоящих вариантов осуществления очевидны для специалиста, а общие принципы, представленные в настоящем документе, могут быть воплощены в других вариантах осуществления изобретения без отступления от существа и объема настоящего изобретения. Следовательно, настоящее изобретение не ограничивается вариантами осуществления, приведенными в настоящем документе, но максимально широко соответствует принципам и элементам новизны, раскрытым в настоящем документе.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОРИЕНТАЦИИ ПРОХОДЧЕСКОГО КОМПЛЕКСА ПРИ СТРОИТЕЛЬСТВЕ КРИВОЛИНЕЙНЫХ ТОННЕЛЕЙ | 2008 |
|
RU2385418C1 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТАЦИИ ПРОХОДЧЕСКОГО КОМПЛЕКСА ПРИ СТРОИТЕЛЬСТВЕ КРИВОЛИНЕЙНЫХ ТОННЕЛЕЙ | 2008 |
|
RU2385419C1 |
| Способ позиционирования проходческого комбайна и коронки его исполнительного органа | 2023 |
|
RU2830692C1 |
| ПРОХОДЧЕСКИЙ КОМБАЙН С ЭКСЦЕНТРИКОВОЙ ФРЕЗОЙ, СПОСОБНЫЙ РАЗРУШАТЬ ГОРНУЮ ПОРОДУ ПО ЗАДАННОЙ ТРАЕКТОРИИ, НЕ ВЛИЯЯ ПРИ ЭТОМ НА ОПЕРАЦИЮ ПОДДЕРЖКИ | 2020 |
|
RU2777772C1 |
| Система позиционирования проходческого комплекса в пространстве | 2019 |
|
RU2733256C1 |
| Способ разработки месторождений полезных ископаемых подземным способом с использованием тоннелепроходческих механизированных комплексов | 2022 |
|
RU2801989C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ИСКРИВЛЕНИЯ СКВАЖИНЫ | 1999 |
|
RU2166085C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО КОНТРОЛЯ СКОРОСТИ ХОДА УГОЛЬНОГО КОМБАЙНА НА ОСНОВАНИИ СТЕПЕНИ ОБРУШЕНИЯ УГОЛЬНОГО ЗАБОЯ | 2020 |
|
RU2780056C1 |
| СИСТЕМА НАВЕДЕНИЯ ГОРНОГО КОМБАЙНА | 2015 |
|
RU2716765C2 |
| ИДЕНТИФИКАЦИЯ САМОЛЕТА И СИСТЕМЫ УПРАВЛЕНИЯ ШВАРТОВКОЙ | 1994 |
|
RU2155384C2 |
Изобретение относится к области технологий измерения проходки, в частности к способу измерения проходки для проходческого комбайна с использованием лазерного датчика и датчика ориентации. Согласно способу устанавливается устройство измерения расстояния и светоотражающая мишень, лазерный луч направляется на светоотражающую мишень при помощи лазерного датчика. Лазерный луч, отражаемый светоотражающей мишенью, принимается, а время между отправкой и приемом лазерного луча определяется на таймере, чтобы вычислить расстояние от лазерного датчика до светоотражающей мишени, а также автоматически измерить проходку, преодолеваемую проходческим комбайном. Кроме того, контролируется количество
от лазерного датчика до светоотражающей мишени, а также автоматически измерить проходку, преодолеваемую проходческим комбайном. Кроме того, контролируется количество  возвращаемого света, определяется попадание лазерного луча на мишень, исходя из количества возвращаемого света, и надлежащим образом начинается процесс наведения на мишень. Согласно методу измерения проходки для проходческого комбайна по настоящему изобретению устанавливаются устройство измерения расстояния и светоотражающая мишень для автоматического измерения проходки проходческого комбайна. Технический результат заключается в обеспечении высокой точности измерения проходки, а также в снижении трудоемкости. Кроме того, попадание лазерного луча на мишень определяется исходя из количества возвращаемого света, измеряемого лазерным датчиком, чтобы активировать, когда требуется, головку штатива двигателя управления для наведения на мишень, что повышает точность и полноту измерения расстояния. 7 з.п. ф-лы, 3 ил.
возвращаемого света, определяется попадание лазерного луча на мишень, исходя из количества возвращаемого света, и надлежащим образом начинается процесс наведения на мишень. Согласно методу измерения проходки для проходческого комбайна по настоящему изобретению устанавливаются устройство измерения расстояния и светоотражающая мишень для автоматического измерения проходки проходческого комбайна. Технический результат заключается в обеспечении высокой точности измерения проходки, а также в снижении трудоемкости. Кроме того, попадание лазерного луча на мишень определяется исходя из количества возвращаемого света, измеряемого лазерным датчиком, чтобы активировать, когда требуется, головку штатива двигателя управления для наведения на мишень, что повышает точность и полноту измерения расстояния. 7 з.п. ф-лы, 3 ил.
1. Способ измерения проходки для проходческого комбайна, включающий следующие этапы:
этап 1 - установка светоотражающей мишени (1) и устройства измерения расстояния (2), отличающийся тем, что светоотражающая мишень (1) устанавливается над путем (3), сопрягаемым с ленточным транспортером двойного назначения (4), и неподвижна относительного него; устройство измерения расстояния (2) включает лазерный датчик (21), датчик ориентации (22), головку штатива двигателя управления (23) и блок обработки данных (24), головка штатива двигателя управления (23) включает двигатель управления в горизонтальной плоскости, двигатель управления относительно поперечной оси и головку штатива; устройство измерения расстояния (2) устанавливается на ленточном транспортере двойного назначения (4), а головка штатива двигателя управления (23) настраивается таким образом, чтобы лазерный луч, направляемый лазерным датчиком (21), образовал круг радиусом 5 см, располагающийся в середине светоотражающей мишени (1);
этап 2 - во время начала работы определение рабочего режима данного проходческого комбайна (5) на основании расстояния, измеряемого лазерным датчиком (21), и ускорения, измеряемого датчиком ориентации (22), а также регистрирование расстояния проходки тоннеля, когда проходческий комбайн (5) работает в режиме проходки тоннеля в первый раз, при этом расстояние проходки тоннеля обозначается как  ;
;
этап 3 - регистрирование количества  возвращаемого света, измеряемого лазерным датчиком (21), и сравнение количества
возвращаемого света, измеряемого лазерным датчиком (21), и сравнение количества  возвращаемого света, измеряемого лазерным датчиком (21), с предварительно установленным пороговым количеством
возвращаемого света, измеряемого лазерным датчиком (21), с предварительно установленным пороговым количеством  возвращаемого света в блоке обработки данных (24), при этом, если измеренное количество возвращаемого света превышает пороговое количество, лазерный луч падает на светоотражающую мишень (1), что обозначается как «попадание в мишень», и выполняется этап 5; в противном случае облучение обозначается как «непопадание в мишень» и выполняется этап 4;
возвращаемого света в блоке обработки данных (24), при этом, если измеренное количество возвращаемого света превышает пороговое количество, лазерный луч падает на светоотражающую мишень (1), что обозначается как «попадание в мишень», и выполняется этап 5; в противном случае облучение обозначается как «непопадание в мишень» и выполняется этап 4;
этап 4 - включение головки штатива двигателя управления (23) для наведения на мишень;
Э1: расчет угловых диапазонов  и
и  для горизонтального вращения головки штатива двигателя управления (23) и ее вращения относительно поперечной оси исходя из расстояния проходки тоннеля
для горизонтального вращения головки штатива двигателя управления (23) и ее вращения относительно поперечной оси исходя из расстояния проходки тоннеля  в момент до того, как устройство измерения расстояния (2) промахнется мимо мишени, а также длины
в момент до того, как устройство измерения расстояния (2) промахнется мимо мишени, а также длины  и ширины
и ширины  светоотражающей мишени (1), так что
светоотражающей мишени (1), так что 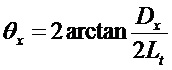 и
и  ;
;
Э2: расчет количеств  и
и  раз выполнения сканирования для головки штатива в горизонтальном направлении и в направлении относительно поперечной оси с учетом расчетных угловых диапазонов
раз выполнения сканирования для головки штатива в горизонтальном направлении и в направлении относительно поперечной оси с учетом расчетных угловых диапазонов  и для горизонтального вращения головки штатива двигателя управления (23) и ее вращения относительно поперечной оси, так что
и для горизонтального вращения головки штатива двигателя управления (23) и ее вращения относительно поперечной оси, так что  ,
,  ,
,  - это угол разрешения двигателя управления в горизонтальной плоскости, а
- это угол разрешения двигателя управления в горизонтальной плоскости, а  - это угол разрешения двигателя управления относительно поперечной оси;
- это угол разрешения двигателя управления относительно поперечной оси;
Э3: установление прямоугольной системы координат с использованием положения, в котором луч света падает на светоотражающую мишень (1) в момент до того, как луч света будет направлен мимо мишени, изначально, так что координаты с положительной величиной по  -оси идут в горизонтальном направлении вправо, координаты с положительной величиной по
-оси идут в горизонтальном направлении вправо, координаты с положительной величиной по  -оси идут в вертикальном направлении вверх, а головка штатива двигателя управления (23) ищет светоотражающую мишень (1) отдельно по линейным направлениям
-оси идут в вертикальном направлении вверх, а головка штатива двигателя управления (23) ищет светоотражающую мишень (1) отдельно по линейным направлениям  и
и  в системе координат, пока не будет обнаружена светоотражающая мишень (1) в первый раз;
в системе координат, пока не будет обнаружена светоотражающая мишень (1) в первый раз;
Э4: при движении по часовой стрелке и против часовой стрелки, при помощи двигателя управления в горизонтальной плоскости, отдельно выполняется сканирование раз, а также регистрирование количеств  и
и  раз выполнения сканирования светоотражающей мишени (1) отдельно по часовой стрелке и против часовой стрелки; и если
раз выполнения сканирования светоотражающей мишени (1) отдельно по часовой стрелке и против часовой стрелки; и если  , то, при движении по часовой стрелке, при помощи двигателя управления в горизонтальной плоскости, сканирование выполняется
, то, при движении по часовой стрелке, при помощи двигателя управления в горизонтальной плоскости, сканирование выполняется  раз; или если
раз; или если  , то, при движении против часовой стрелки, при помощи двигателя управления в горизонтальной плоскости, сканирование выполняется
, то, при движении против часовой стрелки, при помощи двигателя управления в горизонтальной плоскости, сканирование выполняется  раз, при этом в данном случае лазерный луч падает в центр светоотражающей мишени (1) в горизонтальном направлении; при движении по часовой стрелке и против часовой стрелки, при помощи двигателя управления относительно поперечной оси, выполняется сканирование раз, а также регистрирование количеств
раз, при этом в данном случае лазерный луч падает в центр светоотражающей мишени (1) в горизонтальном направлении; при движении по часовой стрелке и против часовой стрелки, при помощи двигателя управления относительно поперечной оси, выполняется сканирование раз, а также регистрирование количеств  и
и  раз выполнения сканирования светоотражающей мишени (1) отдельно по часовой стрелке и против часовой стрелки; и если
раз выполнения сканирования светоотражающей мишени (1) отдельно по часовой стрелке и против часовой стрелки; и если  , то, при движении по часовой стрелке, при помощи двигателя управления относительно поперечной оси, сканирование выполняется
, то, при движении по часовой стрелке, при помощи двигателя управления относительно поперечной оси, сканирование выполняется  раз; или если
раз; или если  , то, при сканировании против часовой стрелки, при помощи двигателя управления относительно поперечной оси, сканирование выполняется
, то, при сканировании против часовой стрелки, при помощи двигателя управления относительно поперечной оси, сканирование выполняется  раз, при этом в данном случае лазерный луч падает в центр светоотражающей мишени (1) в вертикальном направлении; два положения сочетаются, и устройство измерения расстояния (2) направляет луч в центр светоотражающей мишени (1), чтобы завершить процесс наведения на мишень;
раз, при этом в данном случае лазерный луч падает в центр светоотражающей мишени (1) в вертикальном направлении; два положения сочетаются, и устройство измерения расстояния (2) направляет луч в центр светоотражающей мишени (1), чтобы завершить процесс наведения на мишень;
этап 5 - регистрирование расстояния проходки тоннеля, когда проходческий комбайн (5) находится в режиме проходки тоннеля, для получения проходки тоннеля  =
=  - проходческого комбайна (5), при этом расстояние проходки тоннеля определяется как ; а также
- проходческого комбайна (5), при этом расстояние проходки тоннеля определяется как ; а также
этап 6 - повторение вышеизложенных этапов, чтобы завершить измерение проходки проходческого комбайна (5).
2. Способ по п. 1, отличающийся тем, что на этапе 1 устройство измерения расстояния (2) дополнительно включает датчик угла, предназначенный для сбора данных о величинах углов в трех осях с лазерного датчика (21) и для корректировки отклонения по расстоянию, а датчик угла устанавливается на головке штатива и точно сопрягается с лазерным датчиком (21); блок обработки данных (24) принимает и обрабатывает данные, контролируемые лазерным датчиком (21) и датчиком угла, для получения  , где:
, где:  - расстояние, измеряемое лазерным датчиком (21) от устройства измерения расстояния до светоотражающей мишени (1), а
- расстояние, измеряемое лазерным датчиком (21) от устройства измерения расстояния до светоотражающей мишени (1), а  - расстояние проходки тоннеля после настройки точности, γ, α - оси; в данном случае расстояние проходки тоннеля, когда проходческий комбайн (5) находится в режиме проходки тоннеля в первый раз, обозначается как
- расстояние проходки тоннеля после настройки точности, γ, α - оси; в данном случае расстояние проходки тоннеля, когда проходческий комбайн (5) находится в режиме проходки тоннеля в первый раз, обозначается как  ; тогда расстояние проходки тоннеля, когда проходческий комбайн (5) соответственно находится в режиме проходки тоннеля, обозначается как
; тогда расстояние проходки тоннеля, когда проходческий комбайн (5) соответственно находится в режиме проходки тоннеля, обозначается как  , а проходка тоннеля составляет:
, а проходка тоннеля составляет:  .
.
3. Способ по п. 2, отличающийся тем, что устройство измерения расстояния (2) дополнительно включает противовзрывной корпус (25), сервер (26), дисплей (27) и источник питания постоянного тока (28); на противовзрывном корпусе (25) располагается множество сигнализаторов (251), предназначенных для подачи питания и связи с окружающей средой, а в передней части располагается одно стеклянное окно (252), через которое проходит лазерный луч, направляемый лазерным датчиком (21) на светоотражающую мишень (1); сервер (26) предназначен для хранения и дальнейшей обработки данных, получаемых блоком обработки данных (24), а также вывода окончательного результата на дисплей (27) для отображения; дисплей (27) предназначен для отображения проходки и рабочего режима данного проходческого комбайна (5), статуса светоотражающей мишени (1), а также данных о величинах углов в трех осях головки штатива; источник питания постоянного тока (28) предназначен для подачи питания на все устройства измерения расстояния (2).
4. Способ по п. 2, отличающийся тем, что датчик ориентации (22) представляет собой датчик измерения пространственного движения, основанный на технологии микроэлектромеханических систем (МЭМС).
5. Способ по п. 2, отличающийся тем, что головка штатива двигателя управления (23) включает двигатель управления в горизонтальной плоскости, двигатель управления относительно поперечной оси и головку штатива, способную вращаться в горизонтальном направлении и относительно поперечной оси.
6. Способ по п. 1, отличающийся тем, что на этапе 2 предусматривается пять режимов работы проходческого комбайна (5): включение питания, проходка тоннеля, движение вперед, движение назад и перемещение пути, сопрягаемого с ленточным транспортером; когда разница в значениях  между расстояниями проходки тоннеля, получаемыми с помощью лазерного датчика (21) в двух точках времени, колеблется в пределах диапазона
между расстояниями проходки тоннеля, получаемыми с помощью лазерного датчика (21) в двух точках времени, колеблется в пределах диапазона  , а ускорение, измеряемое датчиком ориентации (22), соответствует
, а ускорение, измеряемое датчиком ориентации (22), соответствует  , то определяется, что данный проходческий комбайн (5) находится в режиме включения питания; когда значения, получаемые при возврате сигнала лазерного датчика (21), постепенно увеличиваются,
, то определяется, что данный проходческий комбайн (5) находится в режиме включения питания; когда значения, получаемые при возврате сигнала лазерного датчика (21), постепенно увеличиваются,  , а ускорение, измеряемое датчиком ориентации (22), соответствует
, а ускорение, измеряемое датчиком ориентации (22), соответствует  , то определяется, что проходческий комбайн (5) находится в режиме движения вперед; когда разность в значениях, получаемая при возврате сигнала лазерного датчика (21), соответствует
, то определяется, что проходческий комбайн (5) находится в режиме движения вперед; когда разность в значениях, получаемая при возврате сигнала лазерного датчика (21), соответствует  , а ускорение, измеряемое датчиком ориентации (22), соответствует
, а ускорение, измеряемое датчиком ориентации (22), соответствует  , то определяется, что проходческий комбайн (5) находится в режиме проходки тоннеля; когда значения, получаемые при возврате сигнала лазерного датчика (21), постепенно уменьшаются,
, то определяется, что проходческий комбайн (5) находится в режиме проходки тоннеля; когда значения, получаемые при возврате сигнала лазерного датчика (21), постепенно уменьшаются,  , а ускорение, измеряемое датчиком ориентации (22), соответствует
, а ускорение, измеряемое датчиком ориентации (22), соответствует  , то определяется, что проходческий комбайн (5) в данное время находится в режиме движения назад; когда разница в значениях, получаемых при возврате сигнала лазерного датчика (21), соответствует
, то определяется, что проходческий комбайн (5) в данное время находится в режиме движения назад; когда разница в значениях, получаемых при возврате сигнала лазерного датчика (21), соответствует  , а ускорение, измеряемое датчиком ориентации (22), соответствует
, а ускорение, измеряемое датчиком ориентации (22), соответствует  , то определяется, что проходческий комбайн (5) в данное время находится в режиме перемещения пути, сопрягаемого с ленточным транспортером, где:
, то определяется, что проходческий комбайн (5) в данное время находится в режиме перемещения пути, сопрягаемого с ленточным транспортером, где:  и
и  - расстояния проходки тоннеля в двух точках времени,
- расстояния проходки тоннеля в двух точках времени,  - ускорение в реальном времени, измеряемое датчиком ориентации (22),
- ускорение в реальном времени, измеряемое датчиком ориентации (22),  и
и  - два пороговых значения ускорения, предварительно установленных в системе, и
- два пороговых значения ускорения, предварительно установленных в системе, и  .
.
7. Способ по п. 1, отличающийся тем, что на этапе 4 количество раз выполнения сканирования увеличивают до  и
и  , чтобы обеспечить точное сканирование светоотражающей мишени (1),
, чтобы обеспечить точное сканирование светоотражающей мишени (1),  , и
, и  , где:
, где:  - любое целое число от 0 до 5.
- любое целое число от 0 до 5.
8. Способ по п. 1, отличающийся тем, что пороговое начальное количество возвращаемого света обозначается как  ; дополнительно устанавливается значение выбора порогового количества возвращаемого света
; дополнительно устанавливается значение выбора порогового количества возвращаемого света  , и когда измеряемое количество возвращаемого света соответствует
, и когда измеряемое количество возвращаемого света соответствует  , лазерный луч падает на светоотражающую мишень (1), что обозначается как «попадание в мишень», а пороговое начальное количество возвращаемого света остается
, лазерный луч падает на светоотражающую мишень (1), что обозначается как «попадание в мишень», а пороговое начальное количество возвращаемого света остается  ; когда измеряемое количество возвращаемого света соответствует
; когда измеряемое количество возвращаемого света соответствует  , для порогового количества возвращаемого света задается значение
, для порогового количества возвращаемого света задается значение  ; измеряемое количество возвращаемого света повторно сравнивается с заданным пороговым количеством возвращаемого света, и если
; измеряемое количество возвращаемого света повторно сравнивается с заданным пороговым количеством возвращаемого света, и если  , то лазерный луч падает на светоотражающую мишень (1), что обозначается как «попадание в мишень», или в противном случае как «непопадание в мишень».
, то лазерный луч падает на светоотражающую мишень (1), что обозначается как «попадание в мишень», или в противном случае как «непопадание в мишень».
| СПОСОБ КОНТРОЛЯ СМЕЩЕНИЯ ПОДВИЖНОГО ОБЪЕКТА ОТНОСИТЕЛЬНО ОПОРНОГО НАПРАВЛЕНИЯ | 1989 |
|
RU2068091C1 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТАЦИИ ПРОХОДЧЕСКОГО КОМПЛЕКСА ПРИ СТРОИТЕЛЬСТВЕ КРИВОЛИНЕЙНЫХ ТОННЕЛЕЙ | 2008 |
|
RU2385418C1 |
| СИСТЕМА КОНТРОЛЯ ПОЛОЖЕНИЯ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ МИНИ-ЩИТА ДЛЯ СТРОИТЕЛЬСТВА МИНИ-ТОННЕЛЕЙ | 2009 |
|
RU2405937C1 |
| RU 2008128927 A, 27.01.2010 | |||
| US 5667279 A1, 16.09.1997 | |||
| CN 106646498 A, 10.05.2017 | |||
| JP 2019199708 A, 21.11.2019. | |||

