Изобретение относится к области радиотехники и может быть использовано для измерения двумерных координат наземной цели угломерно-дальномерным методом радиолокационной системой, состоящей из многолучевого передатчика с известными координатами, излучающего кодированные радиолокационные сигналы в заданных направлениях, и приемника-пеленгатора с известными координатами, принимающего сигналы, отраженные от наземной цели, определяющего направление на наземную цель и измеряющего расстояние приемник-пеленгатор - наземная цель - передатчик.
В радиолокации весьма обширный и важный класс лоцируемых объектов составляют источники радиоизлучений, наблюдение за которыми осуществляется пеленгаторами, принимающими излучаемые радиосигналы. Широкое применение на практике нашли системы, базирующиеся на пеленгационных методах [1]. Одной из задач, решаемых при радиолокационном наблюдении, является задача измерения пеленгов источников излучений [2].
Известен способ определения координат наземной цели радиолокационной системой, состоящей из двух многолучевых радиопередатчиков и приемника [3]. Недостатком этого способа является то, что зона поиска координат наземной цели (область неопределенности) достаточно велика и ограничивается четырехугольником, определяемым пересечением лучей диаграмм направленности антенн двух многолучевых передатчиков, в пределах которых находится наземная цель. При этом поиск оценок координат наземной цели осуществляется путем последовательной проверки гипотез о нахождении наземной цели в точках, задаваемых с некоторым шагом в пределах всей области неопределенности, а количество проверяемых гипотез определяется размером зоны неопределенности и величиной шага перебора проверяемых точек.
Целью изобретения является сокращение количества проверяемых гипотез за счет сокращения области неопределенности при поиске оценок координат наземной цели.
Поставленная цель достигается тем, что в предлагаемом изобретении измерение координат наземной цели осуществляется радиолокационной системой, содержащей один многолучевой передатчик и приемник-пеленгатор сигналов, отраженных от наземной цели, за счет использования информации о номере луча передатчика, сигнал которого обеспечивает подсвет наземной цели, измерения приемником-пеленгатором направления на наземную цель и расстояния приемник-пеленгатор - наземная цель - передатчик. При этом область неопределенности при поиске оценок координат наземной цели ограничивается отрезком прямой, определяемым пересечением границ луча передатчика, в пределах которого находится наземная цель, с линией пеленга наземной цели, измеренного приемником-пеленгатором.
Способ определения координат наземной цели радиолокационной системой, состоящей из приемника-пеленгатора и многолучевого передатчика заключается в следующем:
- передатчик с известными координатами х1, y1 осуществляет излучение в направлениях ϕn, (n=1, 2, …, N) кодированных радиолокационных сигналов со своим кодом для каждого направления, которые рассеиваются наземной целью с искомыми координатами х, у и принимаются приемником-пеленгатором с известными координатами хп, уп, синхронизированным с передатчиком;
- приемник-пеленгатор измеряет расстояние R передатчик - наземная цель - приемник-пеленгатор, определяет направление ϕn передатчик - наземная цель по коду радиолокационного сигнала, рассеянного наземной целью и принятому приемником-пеленгатором, измеряет направление пеленга ϕц на наземную цель;
- с использованием известных координат х1, y1 многолучевого передатчика, известных координат хп, уп приемника-пеленгатора, измеренного направления ϕn луча передатчика и измеренного направления пеленга ϕц на наземную цель осуществляется оценка границ области поиска координат х, у наземной цели;
- определение координат х, у наземной цели осуществляется путем последовательного перебора координат точек в области поиска и проверки гипотез о нахождении наземной цели в этих точках, критерием рабочей гипотезы является минимум разности между измеренным расстоянием R и расстоянием  передатчик - гипотетическая наземная цель - приемник-пеленгатор, координаты
передатчик - гипотетическая наземная цель - приемник-пеленгатор, координаты  и
и  гипотетической наземной цели, соответствующие минимуму этого критерия, являются искомыми координатами х, у наземной цели.
гипотетической наземной цели, соответствующие минимуму этого критерия, являются искомыми координатами х, у наземной цели.
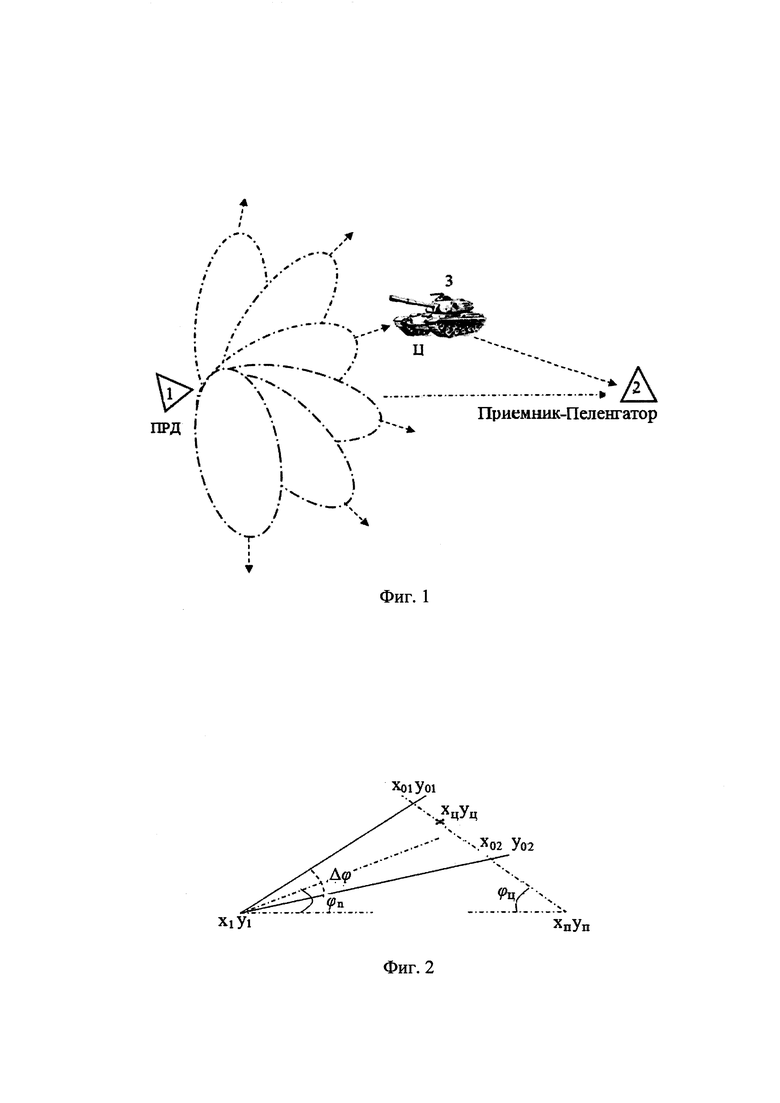
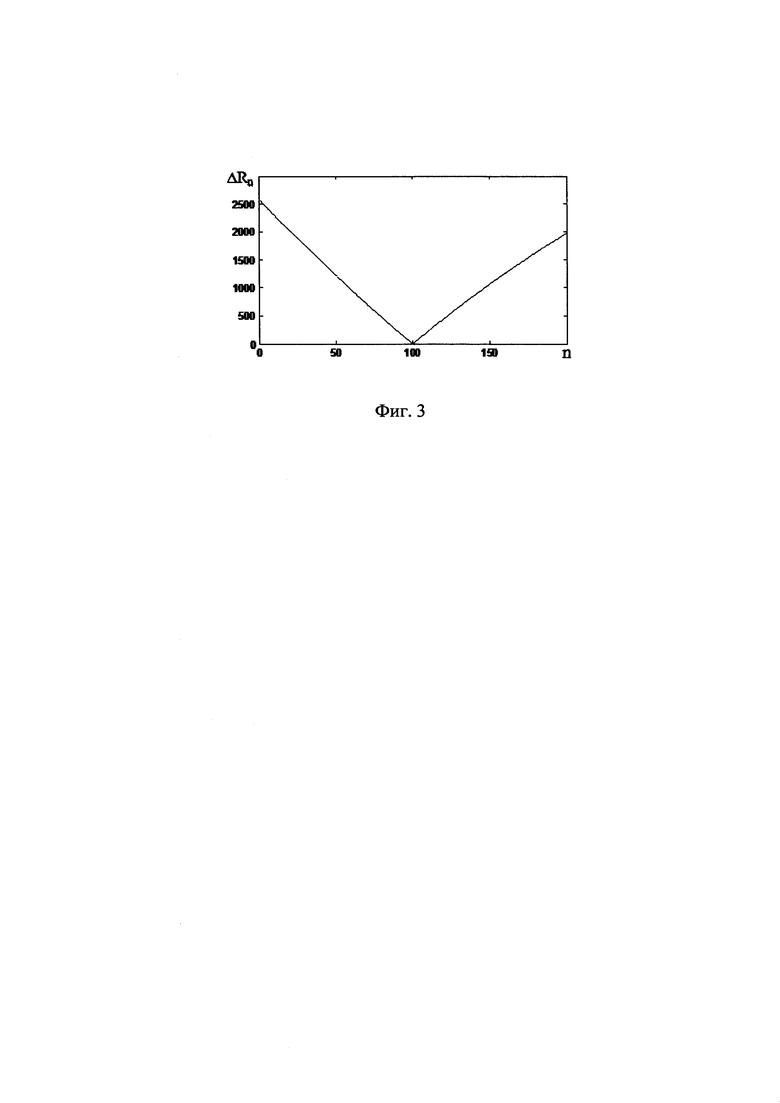
На Фиг. 1 приведена схема радиолокационной системы, на Фиг. 2 показана область поиска местоположения наземной цели. На Фиг. 3 приведены результаты численного моделирования предложенного способа в виде графика зависимости критериального параметра ΔRm от номера шага поиска m.
Радиолокационная система состоит из многолучевого передатчика 1 с известными координатами х1, у1, и приемника-пеленгатора 2 с известными координатами хп, уп.
Многолучевой передатчик 1 излучает кодированные радиолокационные сигналы в направлениях ϕn (n=1, 2, …, N), сформированных лучами диаграммы направленности антенны.
При этом каждому лучу соответствует свой индивидуальный код, обеспечивающий возможность его идентификации в приемнике-пеленгаторе 2 и возможность определения приемником-пеленгатором направления передатчик - наземная цель по коду сигнала передатчика 1, отраженного от наземной цели 3.
Принимая сигнал, отраженный от наземной цели 3, приемник-пеленгатор 2 измеряет направление пеленга ϕц на наземную цель.
С использованием информации о координатах х1, y1 передатчика 1, координатах пеленгатора хп, уп, направлении пеленга на наземную цель ϕц, направлении луча передатчик - наземная цель ϕn, а также о ширине луча Δϕ передатчика 1, определяется область поиска местоположения наземной цели 3 (Фиг. 2).
Она ограничена отрезком прямой линии с координатами x01, y01 и x02, y02, определяемыми пересечением границ луча ϕn с направлением пеленга на наземную цель ϕц.
Определение координат x01, y01 осуществляется в результате решения системы уравнений


В матричном виде эта система может быть записана

Решение этой системы имеет вид

Аналогично определяются координаты х02, y02

С использованием координат x01, y01 и х02, y02, формируются границы области поиска координат наземной цели 3.
В сформированной области поиска последовательно с некоторым шагом задаются координаты 
 гипотетической точки, и проверяется гипотеза о нахождении наземной цели 3 в этой точке.
гипотетической точки, и проверяется гипотеза о нахождении наземной цели 3 в этой точке.
Для этого для каждой гипотетической точки рассчитывается расстояние передатчик - гипотетическая наземная цель - приемник-пеленгатор

и определяется значение критериального параметра, представляющего собой модуль разности измеренного расстояния передатчик - наземная цель - приемник-пеленгатор и гипотетического расстояния передатчик - гипотетическая наземная цель - приемник-пеленгатор
Координаты  и
и  соответствующие минимуму критерия ΔR, являются искомыми координатами наземной цели 3.
соответствующие минимуму критерия ΔR, являются искомыми координатами наземной цели 3.
В подтверждение работоспособности предложенного способа приведен пример оценки координат наземной цели 3 с использованием многолучевого передатчика 1 и приемника-пеленгатора 2.
Исходные данные, необходимые для контроля расчета:
Координаты наземной цели 3: х=14000 м; у=10000 м.
Исходные данные для расчета:
Координаты многолучевого передатчика 1: x1=8000 м, y1=4000 м.
Координаты приемника-пеленгатора 2: хп=18000 м, уп=6000 м.
Направление пеленга на наземную цель: ϕц=45°.
Направление луча передатчик - наземная цель: ϕ1=45°.
Ширина луча передатчика: Δϕ=30°.
Измеренное расстояние передатчик - наземная цель - приемник-пеленгатор: R=14135 м.
Результаты расчета
Результаты оценки координат точек пересечения луча ϕ1 и направления пеленга на наземную цель 3 ϕц:
(х01,y01)=(12385 м, 11595 м), (х02,y02)=(15602 м, 8389 м).
Количество шагов поиска оценок координат наземной цели 3 в пределах полученной области неопределенности (отрезка прямой между точками (х01,у01) и (х02,y02)) было задано М=200.
Шаг поиска составил (dx,dy)=[(x02,y02)-(x01,y01)]/M≈(16 м, -16 м).
В цикле от m=1 до М на каждом m-ом шаге рассчитывалось гипотетическое расстояние

где 
 m - номер шага поиска, и значение критериального параметра
m - номер шага поиска, и значение критериального параметра
На Фиг. 3 приведен график зависимости критериального параметра ΔRm от номера шага поиска m.
Проведенные расчеты показали, что для заданных исходных данных минимум критериального параметра ΔRm достигается при m=100. При этом рассчитанные координаты цели равны 
 что практически совпадает с исходными координатами. Абсолютные погрешности определения координат составили значение
что практически совпадает с исходными координатами. Абсолютные погрешности определения координат составили значение 
Определение координат наземной цели 3 при тех же условиях с теми же значениями шага поиска по координатам х и у с использованием известного способа радиолокационной системой, состоящей из двух многолучевых радиопередатчиков и приемника [5], потребовало бы М=200*200=40000 шагов поиска оценок координат наземной цели.
Таким образом, предлагаемый способ с использованием многолучевого передатчика и приемника-пеленгатора позволяет сократить количество проверяемых гипотез при поиске оценок координат наземной цели за счет сокращения области неопределенности. При этом для его реализации, в отличии от известного способа, требуется только один многолучевой передатчик.
Источники информации
1. Черняк B.C. Многопозиционная радиолокация. - М.: Радио и связь, 1993, стр. 73-74, 392-396.
2. Радиоэлектронные системы: Основы построения и теория. Справочник. / Ширман Я.Д., Лосев Ю.И., Минервин Н.Н. и др. / Под ред. проф. Я.Д. Ширмана. - М.: ЗАО "Маквис", 1998, стр. 608.
3. Патент №2722224 РФ, МПК G01S 5/14. Способ определения координат наземной цели радиолокационной системой, состоящей из двух многолучевых радиопередатчиков и приемника / А.В. Журавлев (RU), В.В. Кирюшкин (RU), Е.М. Красов (RU), В.Г. Маркин (RU), В.А. Шуваев (RU); Акционерное общество научно-внедренческое предприятие «ПРОТЕК» (RU). - №2019135370; Заявл. 05.11.2019; Опубл. 28.05.2020, Бюл. №16, 11 с.: 3 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения координат наземной цели радиолокационной системой, состоящей из двух многолучевых радиопередатчиков и приемника | 2019 |
|
RU2722224C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ ВЫСОКОТОЧНОГО ОДНОЭТАПНОГО ПЕЛЕНГАТОРА И АДРЕСНО-ОТВЕТНОЙ ПАКЕТНОЙ ЦИФРОВОЙ РАДИОЛИНИИ В ДКМВ ДИАПАЗОНЕ | 2016 |
|
RU2613369C1 |
| ОДНОЭТАПНЫЙ МЕТОД ПЕЛЕНГОВАНИЯ ИСТОЧНИКОВ ИЗЛУЧЕНИЯ В ДКМВ ДИАПАЗОНЕ С ПРИМЕНЕНИЕМ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКИ, СОСТОЯЩЕЙ ИЗ ВЗАИМНО ОРТОГОНАЛЬНЫХ СИММЕТРИЧНЫХ ГОРИЗОНТАЛЬНЫХ ВИБРАТОРОВ | 2016 |
|
RU2614035C1 |
| Способ определения координат воздушных целей в многопозиционной радиолокационной системе в условиях малого значения отношения сигнал/шум | 2019 |
|
RU2722209C1 |
| Способ определения местоположения сканирующей РЛС пассивным многолучевым пеленгатором | 2016 |
|
RU2633962C1 |
| ВРЕМЕННОЙ СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ СКАНИРУЮЩЕГО ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2020 |
|
RU2742581C1 |
| СПОСОБ ЗАЩИТЫ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ ОТ ПРОТИВОРАДИОЛОКАЦИОННЫХ РАКЕТ И РАЗВЕДЫВАТЕЛЬНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2002 |
|
RU2205418C1 |
| СПОСОБ ПРОСТРАНСТВЕННОЙ ЛОКАЛИЗАЦИИ РАДИОПЕРЕДАТЧИКОВ | 2019 |
|
RU2716004C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2018 |
|
RU2680969C1 |
| Способ определения местоположения работающей РЛС пассивным многолучевым пеленгатором | 2019 |
|
RU2741333C1 |
Изобретение относится к области радиотехники и может быть использовано для измерения двумерных координат наземной цели угломерно-дальномерным методом радиолокационной системой, состоящей из многолучевого передатчика с известными координатами, излучающего кодированные радиолокационные сигналы в заданных направлениях, и приемника-пеленгатора с известными координатами, принимающего сигналы, отраженные от наземной цели, определяющего направление на наземную цель и измеряющего расстояние пеленгатор - наземная цель - передатчик. Техническим результатом изобретения является сокращение количества проверяемых гипотез за счет сокращения области неопределенности при поиске оценок координат наземной цели. В заявленном способе радиолокационной системой, состоящей из приемника-пеленгатора и многолучевого передатчика, осуществляют излучение в направлениях ϕn, (n=1, 2, …, N) передатчиком с известными координатами х1, y1 кодированных радиолокационных сигналов со своим кодом для каждого направления, которые рассеиваются наземной целью с искомыми координатами х, у и принимаются приемником с известными координатами хп, уп, синхронизированным с передатчиком. Измеряют расстояние R передатчик - наземная цель - приемник, определяют направления ϕn передатчик - наземная цель по коду радиолокационного сигнала, и затем определяют границы области поиска координат х, у наземной цели. Область поиска ограничивается отрезком прямой, определяемой пересечением границ луча ϕn с линией пеленга на наземную цель ϕц. Координаты х, у наземной цели определяют путем проверки гипотез о нахождении наземной цели в каждой из точек в области поиска, при этом критерием рабочей гипотезы является минимум разности между измеренным расстоянием R и расстоянием  передатчик - гипотетическая наземная цель - приемник. 3 ил.
передатчик - гипотетическая наземная цель - приемник. 3 ил.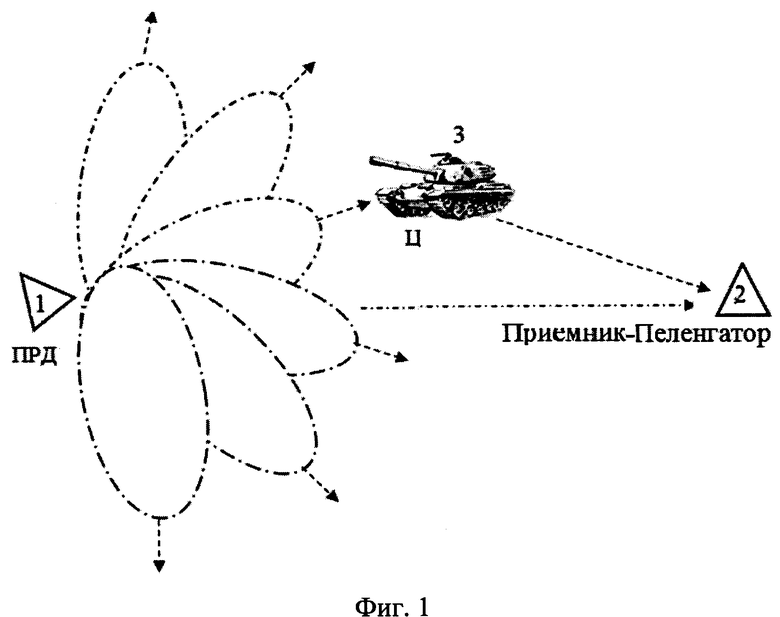
Способ определения координат наземной цели радиолокационной системой, состоящей из приемника-пеленгатора и многолучевого передатчика, осуществляющий:
- излучение в направлениях ϕn, (n=1, 2, …, N) передатчиком с известными координатами х1, y1 кодированных радиолокационных сигналов со своим кодом для каждого направления, которые рассеиваются наземной целью с искомыми координатами х, у и принимаются приемником с известными координатами хп, уп, синхронизированным с передатчиком, и измеряется расстояние R передатчик - наземная цель - приемник;
- определение направления ϕn передатчик - наземная цель по коду радиолокационного сигнала, рассеянного целью и принятому приемником;
- определение границы области поиска координат х, у наземной цели с использованием координат х1, y1 многолучевого передатчика, и направления ϕn луча;
- определение координат х, у наземной цели путем перебора координат последовательно задаваемых значений точки в области поиска и проверки гипотезы о нахождении наземной цели в этой точке, критерием рабочей гипотезы является минимум разности между измеренным приемником расстоянием R и расстоянием  передатчик - гипотетическая наземная цель - приемник, координаты
передатчик - гипотетическая наземная цель - приемник, координаты  и
и  гипотетической наземной цели, соответствующие минимуму этого критерия, являются искомыми координатами х, у наземной цели,
гипотетической наземной цели, соответствующие минимуму этого критерия, являются искомыми координатами х, у наземной цели,
отличающийся тем, что
- измерение пеленга ϕц на наземную цель производятся приемником-пеленгатором по сигналам от одного используемого многолучевого передатчика;
- область поиска оценок координат наземной цели ограничивается отрезком прямой, определяемой пересечением границ луча ϕn с линией пеленга на наземную цель ϕц.
| Способ определения координат наземной цели радиолокационной системой, состоящей из двух многолучевых радиопередатчиков и приемника | 2019 |
|
RU2722224C1 |
| Способ пространственного отождествления пеленгов с наземными источниками радиоизлучения | 2020 |
|
RU2731682C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ НАЗЕМНОГО ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2018 |
|
RU2695642C1 |
| Способ первичного отождествления позиционных измерений и определения местоположения целей в наземной пространственно распределенной радионавигационной системе в условиях многоцелевой обстановки | 2018 |
|
RU2692702C1 |
| АДАПТИВНЫЙ СПОСОБ ПРОСТРАНСТВЕННОГО ОТОЖДЕСТВЛЕНИЯ ПЕЛЕНГОВ С НАЗЕМНЫМИ ИСТОЧНИКАМИ РАДИОИЗЛУЧЕНИЯ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2018 |
|
RU2686481C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГОРИЗОНТАЛЬНОЙ ДАЛЬНОСТИ ЦЕЛИ ПО ИЗЛУЧЕНИЮ СКАНИРУЮЩЕЙ БОРТОВОЙ РЛС | 2001 |
|
RU2217772C2 |
| СМИРНОВА Д.М | |||
| Определение координат наземных целей в многопозиционной просветной радиолокационной системе // Известия высших учебных заведений России | |||
| Радиоэлектроника | |||
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |

