Изобретение относится к пассивной радиолокации. Преимущественно может использоваться в одно- и многопозиционных системах воздушного радиомониторинга для повышения эффективности отождествления пеленгов с наземными источниками радиоизлучения (ИРИ).
Современные наземные ИРИ используют радиосигналы с псевдослучайно изменяемыми параметрами (несущая частота, длительность и период повторения импульсов, параметры модуляции и др.). Это обстоятельство затрудняет, а в ряде случаев исключает возможность использования указанных данных для идентификации с ними пеленгов, измеряемых воздушными однопозиционными угломерными системами при решении задач радиомониторинга.
В этой связи возникает объективная необходимость использования для отождествления пеленгов с ИРИ координатной информации, инвариантной к изменению радиотехнических параметров сигналов.
Задача отождествления пеленгов с наземными ИРИ по координатной информации может быть решена способами, приведенными в [1] (выбран в качестве прототипа), а также в [2, 3].
Основные недостатки прототипа:
- радиус доверительной области (ДО) ИРИ в процессе обработки пеленгов не адаптируют к текущей точке пеленгования, а используют вычисленный применительно к точке пеленгования на траверзе радиус для отождествления пеленгов, измеренных из других точек. При этом значительное количество пеленгов, в первую очередь полученных в точках измерения, дальность до ИРИ из которых существенно больше расстояния до источников радиоизлучения по линии траверза, с ними не отождествляется;
- построение ДО ИРИ и отождествление пеленгов выполняют не в реальном масштабе времени, а после получения группы пеленгов.
Заявляемый способ обладает следующими основными преимуществами:
- адаптацией радиуса ДО ИРИ применительно к текущей точке пеленгования с учетом взаимного пространственного положения точек пеленгования и координат центра ДО, благодаря которой (адаптации) обеспечивается заданная достоверность (доверительная вероятность) попадания истинного пеленга в соответствующую ДО;
- последовательной обработкой измеренных пеленгов в реальном масштабе времени;
- более высокой вероятностью правильного отождествления пеленгов и оперативностью решения воздушными одно- и многопозиционными угломерными системами задач радиомониторинга.
Предлагаемый способ может использоваться как на этапе первичного (при отсутствии данных о местоположении (МП) ИРИ), так и вторичного (при наличии оценочных значений МП ИРИ или предварительно сгруппированных пеленгов) отождествления пеленгов.
Одновременно предлагается система пространственного отождествления пеленгов (в горизонтальной плоскости) с наземными источниками радиоизлучения, реализующая этот способ.
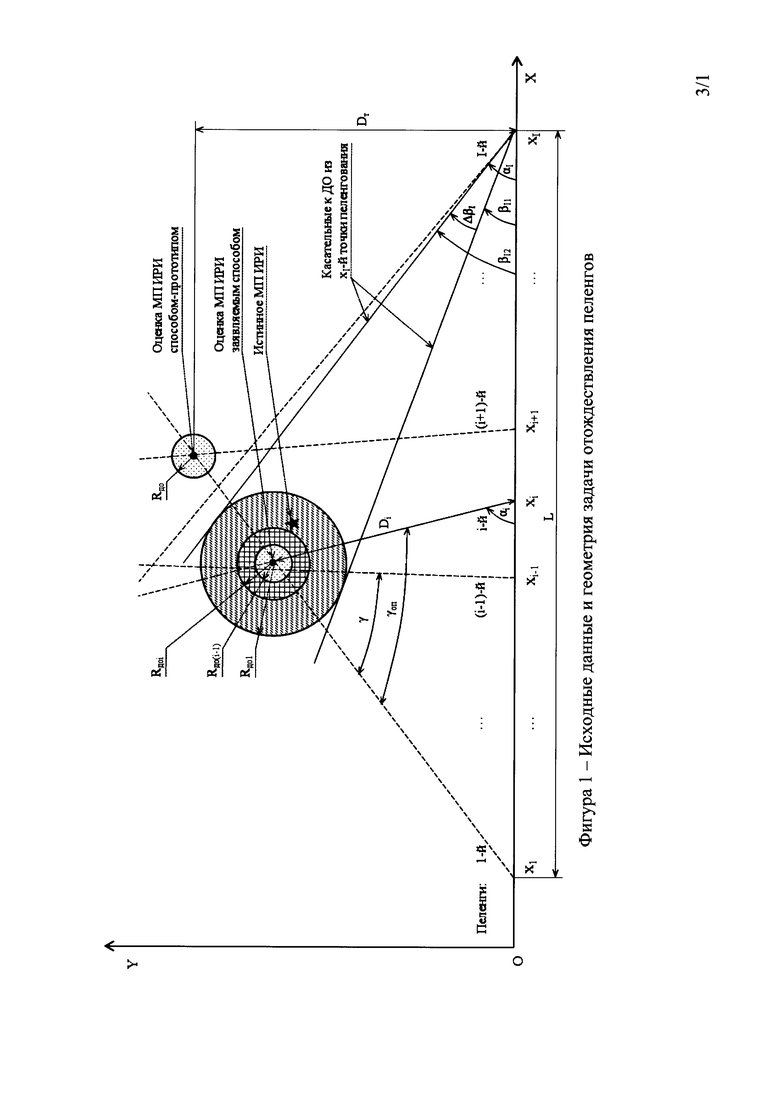
Сущность заявляемого способа поясняется на примере пеленгования однопозиционной воздушной системой радиомониторинга одного ИРИ (фигура 1).
Летательный аппарат (ЛА), оснащенный станцией радиомониторинга (СРМ), осуществляет прямолинейный полет по заданному маршруту. В процессе полета бортовая СРМ последовательно осуществляет пеленгование наземного неподвижного ИРИ из точек xi для определения пеленгов по азимуту αi, где
 L - база пеленгования.
L - база пеленгования.
После измерения первого пеленга производится запоминание его значения и координат точки пеленгования (координат xi, yi ЛА в момент измерения первого пеленга).
При поступлении второго пеленга его значение и координаты соответствующей ему точки пеленгования также запоминаются. Затем выполняется вычисление угла пересечения первого и второго пеленгов γ=|α1-α2| и проверка удовлетворения значения данного угла условию 30°<γ=γоп<120°, где γоп - угол пересечения опорных пеленгов.
Если параметры первого и второго пеленгов не соответствуют данному условию, то этой же процедуре подвергаются очередные (вновь полученные) пеленги до тех пор, пока угол пересечения текущего пеленга с первым не попадет в указанный диапазон. Применительно к фигуре 1, (i-1)-й пеленг пересекается с первым, но не удовлетворяет заданному условию и поэтому не становится вторым опорным.
После попадания угла γ в указанный диапазон углов пересечения, оба пеленга (на фиг. 1 это 1-й и i-й пеленги для заявляемого способа, 1-й и (i+1)-й пеленги для способа-прототипа) считаются опорными, и производится оценка опорных координат ИРИ как точки их пересечения по формулам


где L12 - расстояние между 1-й и 2-й опорными точками нахождения ЛА в момент пеленгования, α1оп и α2оп - опорные пеленги на ИРИ из 1-й и 2-й опорных точек измерения соответственно.
Оцениваемые по двум опорным пеленгам координаты ИРИ используются для определения (задания) центра и радиуса ДО, а также вычисления оценочных значений дальностей до ИРИ из текущих точек пеленгования.
Радиус доверительной области Rдо, в которую попадают с заданной доверительной вероятностью (достоверностью) Рдов мп координаты истинного местоположения (МП) ИРИ (истинные пеленги), рассчитывается с использованием формулы [4]

где ρ - расстояние от центра ДО до точки истинного МП ИРИ,
σα - среднеквадратическая ошибка измерения пеленгов, D - дальность до ИРИ из точки пеленгования.
Задавая Рдов мп, например, для Рдов мп=0,9, получаем выражение для расчета Rдоi применительно к каждой текущей (i-й) точке пеленгования

где Di - дальность до ИРИ из текущей (i-й) точки пеленгования, 
Радиус Rдо ДОдля всех точек пеленгования в способе-прототипе вычисляется по формуле

где Dт - дальность до ИРИ по линии траверза.
Из выражений (4) и (5) следует, что радиус ДО в заявляемом способе изменяется в зависимости от точки пеленгования: Rдоi=var, а в способе-прототипе остается одним и тем же для всех точек пеленгования: Rдoi=Rдо=const.
Далее реализуется алгоритм отождествления ранее поступивших и очередных (вновь полученных) пеленгов с ИРИ, включающий следующие операции:
- вычисление по известным координатам точки измерения пеленга, оценочным (опорным) значениям МП ИРИ и σа по формуле (4) радиуса доверительной области Rдоi для текущей точки пеленгования;
- определение по известным координатам точки измерения пеленга, вычисленному Rдоi и оценочным значениям координат ИРИ углового размера ДО (сектора) Δβi=|βi1-βi2|, где βi1, (βi2) - угол наклона первой (второй) касательной к ДО из i-й точки пеленгования, в пределах которого происходит попадание в нее пеленга, измеренного из текущей точки пеленгования;
- проверку условия попадания пеленга на ИРИ из текущей точки пеленгования в пределы сектора βi1≤αi≤βi2;
- отождествление пеленга, удовлетворяющего указанному условию, с ИРИ.
Проверка работоспособности и оценка эффективности предлагаемого технического решения проводились путем статистического имитационного моделирования на ЭВМ применительно к пеленгованию одного ИРИ.
Моделирование осуществлялось путем задания координат точек пеленгования и наземного ИРИ, по которым рассчитывались пеленги на него. К вычисленным пеленгам добавлялись ошибки их измерения. Отождествление пеленгов, имитирующих измеренные, проводилось заявляемым способом и способом - прототипом для восемнадцати вариантов исходных данных:
- СКО измерения пеленгов σа=0,3°:
1) значение отношения дальности до ИРИ по линии траверза к базе Dт/L=0,1 и количество пеленгов I=5, 15, 31 шт.;
2) Dт/L=0,3 и I=5, 15, 31 шт.;
3) Dт/L=0,6 и I=5, 15, 31 шт.;
- СКО измерения пеленгов σa=3,0°:
1) Dт/L=0,1 и I=5, 15, 31 шт.;
2) Dт/L=0,3 и I=5, 15, 31 шт.;
3) Dт/L=0,6 и I=5, 15, 31 шт.
Качество отождествления пеленгов оценивалось вероятностью их правильного отождествления  равной относительной частоте (отношение числа пеленгов, попадающих в ДО ИРИ, к общему числу измеренных на него пеленгов), а эффективность Э - отношением
равной относительной частоте (отношение числа пеленгов, попадающих в ДО ИРИ, к общему числу измеренных на него пеленгов), а эффективность Э - отношением  где
где  вероятность правильного отождествления заявляемым способом,
вероятность правильного отождествления заявляемым способом,  вероятность правильного отождествления способом - прототипом.
вероятность правильного отождествления способом - прототипом.
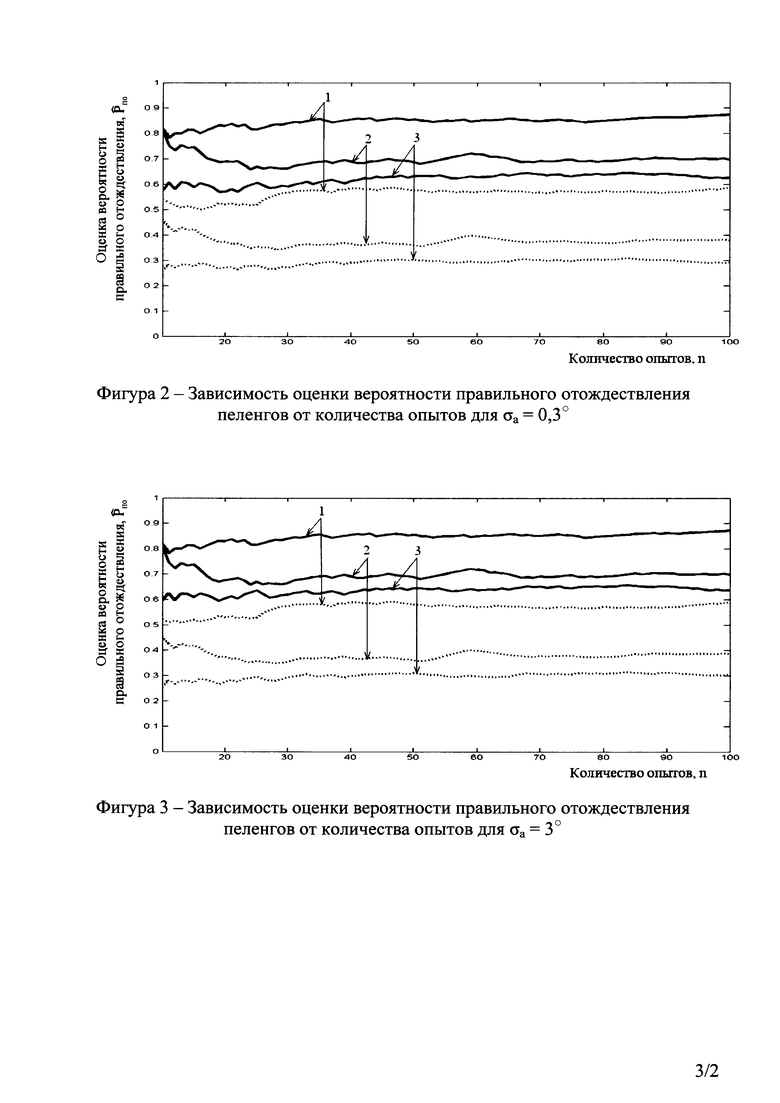
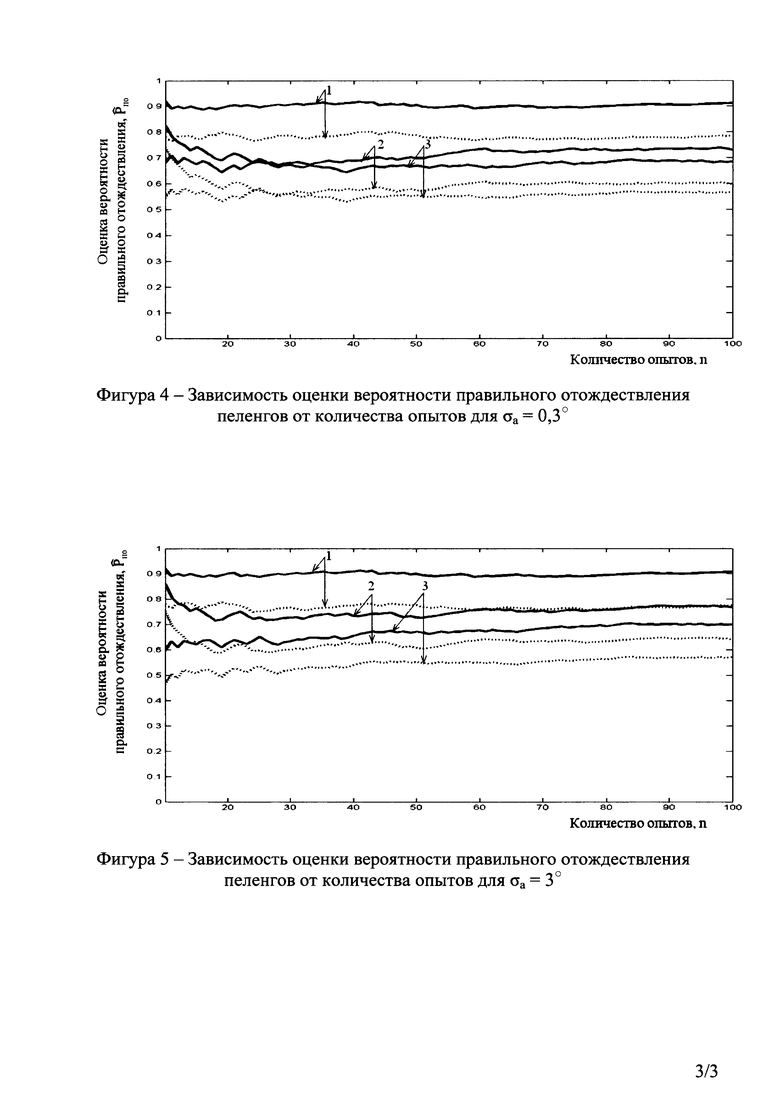
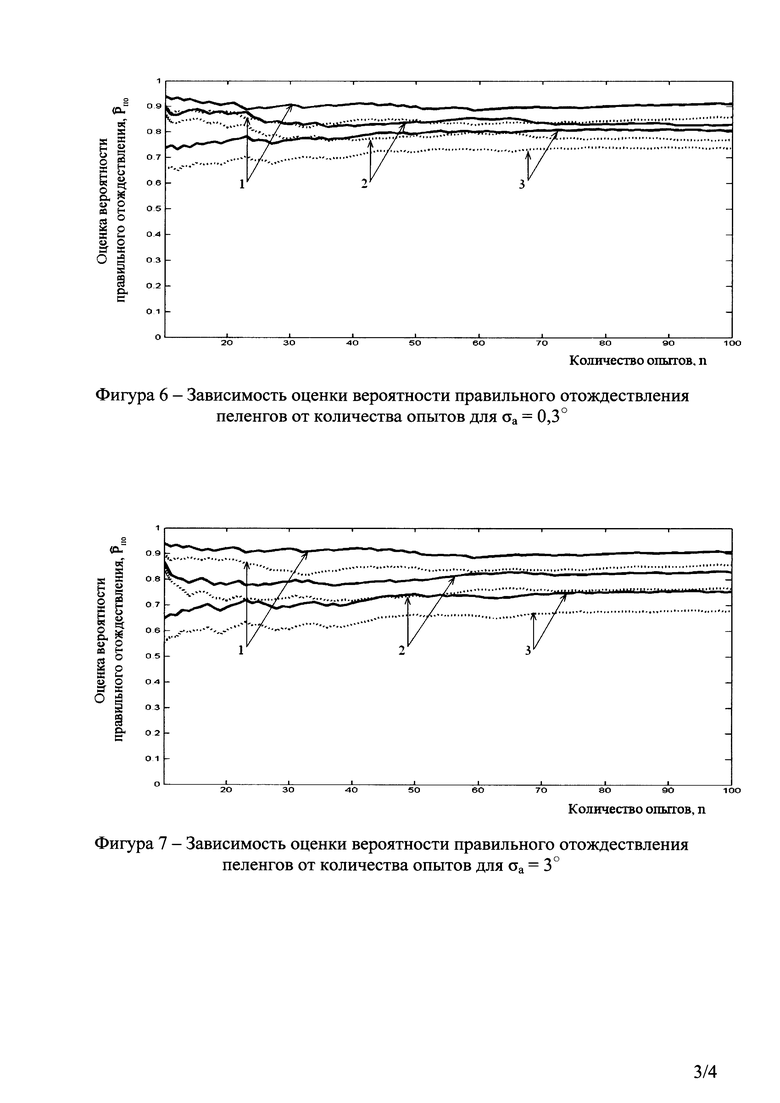
Результаты оценки  и сравнительной эффективности Э предлагаемого способа и способа-прототипа, полученные путем статистического имитационного моделирования на ЭВМ в 100 опытах, а также данные по их надежности (достоверности) и точности приведены на фигурах 2-9 (сплошная линия относится к заявляемому способу, пунктирная - к способу-прототипу, а графики 1, 2, 3 - к значениям количества пеленгов I=5, 15, 31 шт. соответственно) и в таблицах 1-8.
и сравнительной эффективности Э предлагаемого способа и способа-прототипа, полученные путем статистического имитационного моделирования на ЭВМ в 100 опытах, а также данные по их надежности (достоверности) и точности приведены на фигурах 2-9 (сплошная линия относится к заявляемому способу, пунктирная - к способу-прототипу, а графики 1, 2, 3 - к значениям количества пеленгов I=5, 15, 31 шт. соответственно) и в таблицах 1-8.
На фигурах 2, 3 и в таблицах 1, 2 приведены результаты оценки вероятности правильного отождествления пеленгов заявляемым способом и прототипом для значений σа=0,3°; 3,0°, Dт/L=0,1 и I=5, 15, 31 шт.
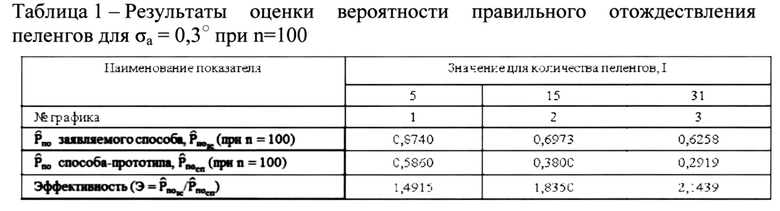
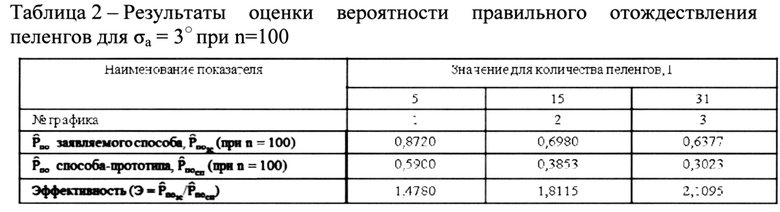
Анализ представленных на графиках (фигуры 2, 3) и в таблицах 1, 2 данных показывает, что по вероятности правильного отождествления пеленгов заявляемый способ превосходит прототип в 1,5 раза при I=5 шт., в 1,8 раза при I=15 шт. и в 2,1 раза при I=31 шт.
Превосходство предлагаемого способа возрастает по мере увеличения количества обрабатываемых пеленгов и практически не зависит от СКО их измерения. Преимущество заявляемого технического решения достигается благодаря тому, что в нем, в отличие от прототипа, применяется адаптация радиуса (размера) ДО ИРИ к текущей точке пеленгования в соответствии с формулой (4). Размеры ДО ИРИ в способе - прототипе вычисляются по выражению (5) только для точки пеленгования на траверзе и без корректировки применяются для обработки пеленгов, полученных в остальных точках измерения, дальность из значительного числа которых до ИРИ может быть существенно больше расстояния до него по линии траверза. В частности, в анализируемом варианте исходных данных дальность до ИРИ из крайних точек пеленгования превосходит расстояние по линии траверза в 5,1 раза.
На фигурах 4, 5 и в таблицах 3, 4 представлены результаты сравнительной оценки вероятности правильного отождествления пеленгов для значений σа=0,3°; 3,0°, Dт/L=0,3 и I=5, 15, 31 шт.
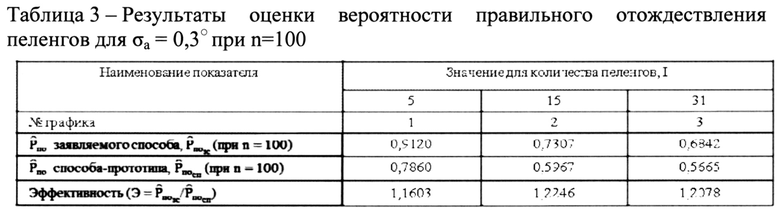
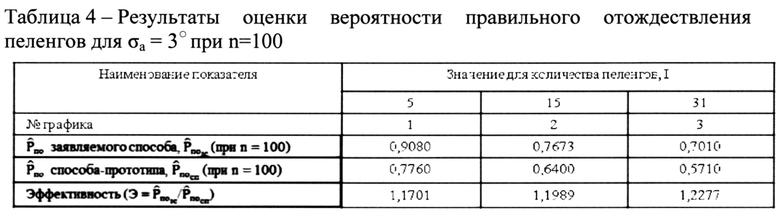
Данные, приведенные на графиках (фигуры 4, 5) и в таблицах 4, 5 свидетельствуют о том, что по вероятности правильного отождествления пеленгов заявляемый способ превосходит прототип примерно в 1, 2 раза во всех вариантах по количеству пеленгов независимо от СКО их измерения.
Преимущество предлагаемого способа достигается за счет, во-первых, адаптации размера ДО ИРИ к текущей точке пеленгования и, во-вторых, благодаря использованию в формуле (4)вычисления радиуса ДО ИРИ математически обоснованного в соответствии с выражением (3) коэффициента пропорциональности, равного 2,146 (применяемый в способе - прототипе аналогичный сомножитель в формуле (5) равен двум).
На фигурах 6, 7 и в таблицах 5, 6 представлены результаты сравнительной оценки вероятности правильного отождествления пеленгов для значений σа=0,3°; 3,0°, Dт/L=0,6 и I=5, 15, 31 шт.
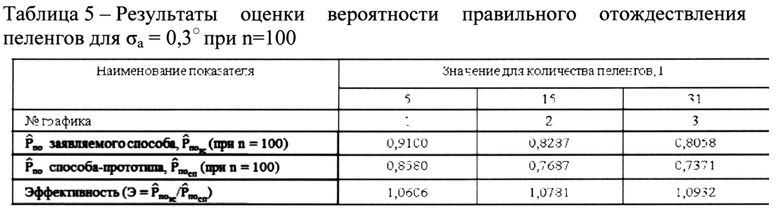
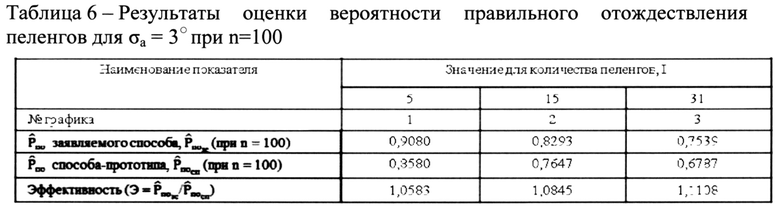
Анализ представленных на графиках (фигуры 6, 7) и в таблицах 6, 7 данных показывает, что по вероятности правильного отождествления пеленгов заявляемый способ превосходит прототип примерно в 1,1 раза во всех вариантах по количеству пеленгов независимо от СКО их измерения.
Преимущество предлагаемого способа в этом варианте исходных данных достигается благодаря использованию для вычисления радиуса ДО ИРИ оптимального (по критерию доверительной вероятности) коэффициента, равного 2,146 при Рдов мп=0,9, вместо применяемого в способе - прототипе аналогичного сомножителя равного двум.
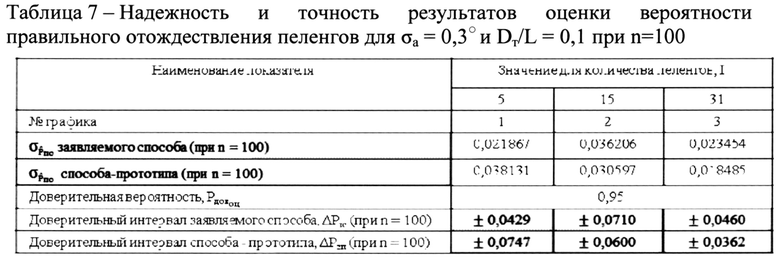
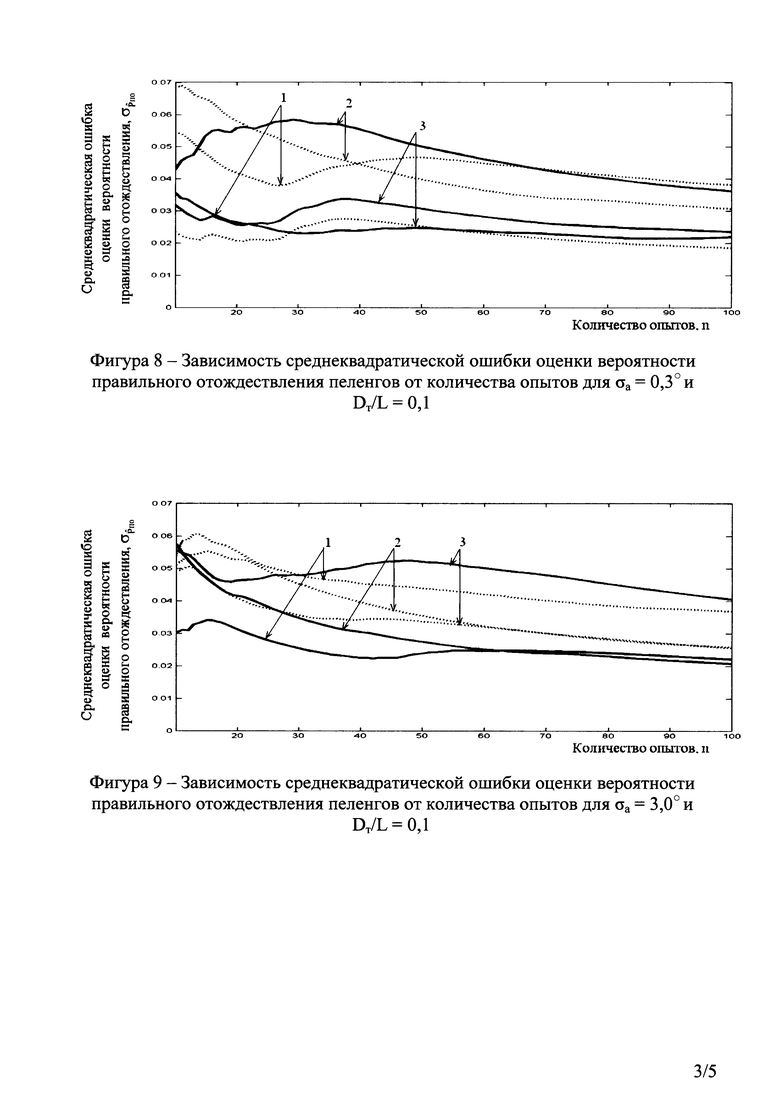
Показатели надежности (достоверности) и точности результатов оценки вероятности правильного отождествления пеленгов заявляемым способом и способом - прототипом для шести наихудших (при наибольших значениях СКО оценки вероятности правильного отождествления) исследованных вариантов, полученные путем статистической обработки данных 100 опытов, представлены на фигурах 8, 9 и в таблицах 7, 8.
На графиках (фигура 8) и в таблице 7 приведены значения СКО, доверительной вероятности Рдов оц и доверительных интервалов оценки вероятности правильного отождествления пеленгов заявляемым способом и способом - прототипом для значений σа=0,3°; Dт/L=0,1 и I=5, 15, 31 шт.
На графиках (фигура 9) и в таблице 8 приведены значения СКО, доверительной вероятности Рдов оц и доверительных интервалов оценки вероятности правильного отождествления пеленгов заявляемым способом и способом - прототипом для значений σа=3,0; Dт/L=0,1; I=5, 15, 31 шт.
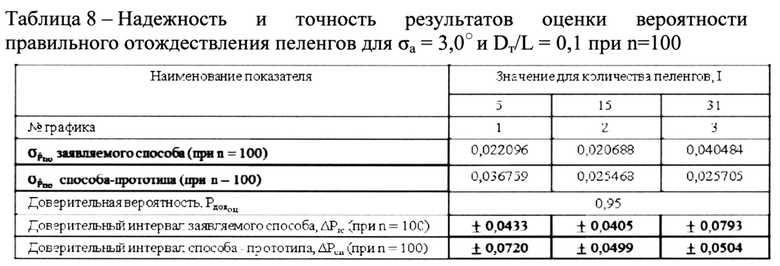
Данные на фигурах 8, 9 и в таблицах 7, 8 свидетельствуют о том, что с 95 - процентной достоверностью значения оценок вероятности правильного отождествления пеленгов заявляемым способом и способом - прототипом, полученные путем статистического имитационного моделирования в 100 опытах, находятся в пределах доверительных интервалов:
 и
и  - для четырех из шести наихудших (при наибольших значениях СКО оценки вероятности правильного отождествления) исследованных вариантов;
- для четырех из шести наихудших (при наибольших значениях СКО оценки вероятности правильного отождествления) исследованных вариантов;
 и
и  - для двух из шести наихудших вариантов.
- для двух из шести наихудших вариантов.
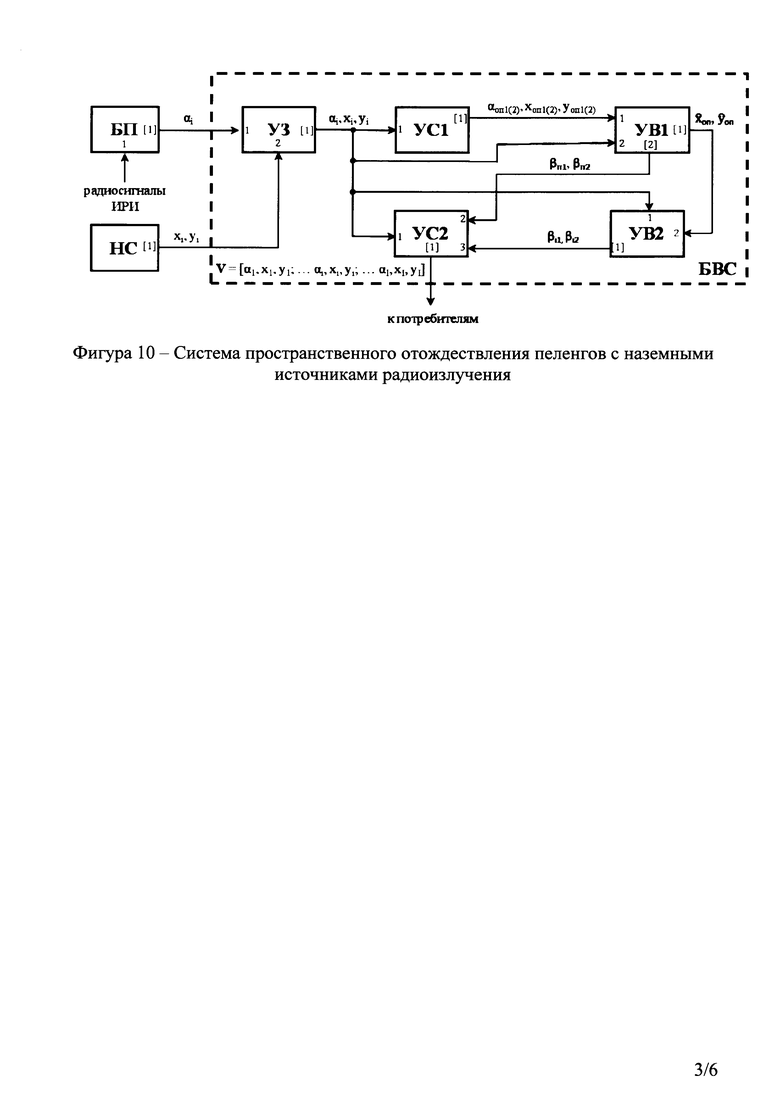
На фигуре 10 представлена упрощенная структурная схема системы пространственного отождествления пеленгов с наземными источниками радиоизлучения, реализующей предлагаемый способ, где входные сигналы обозначены цифрами, а выходные - цифрами в квадратных скобках.
Система включает в себя бортовой пеленгатор (БП) для измерения пеленгов по азимуту αi на ИРИ, навигационную систему (НС) для определения координат xi, yi летательного аппарата, устройство запоминания (УЗ), устройство сравнения (УС1), устройство сравнения (УС2), устройство вычисления (УВ1) и устройство вычисления (УВ2).
Перечисленные устройства, за исключением БП и НС, объединены в бортовую вычислительную систему (БВС).
Система работает следующим образом.
Сигналы от наземного ИРИ поступают на вход 1 бортового пеленгатора, измеряющего пеленги по азимуту αi на ИРИ, которые с выхода [1] БП подаются на вход 1 УЗ. Одновременно с выхода [1] НС на вход 2 УЗ подаются значения координат точек пеленгованиях xi, yi.
После измерения первого пеленга УЗ производится запоминание его значения и координат точки пеленгования.
При поступлении на вход 1 УЗ второго пеленга и координат соответствующей ему точки пеленгования, значения пеленга и координат запоминаются УЗ. Далее значения αi, xi, yi, относящиеся к первому и второму пеленгам, поступают на вход 1 УС1, которое выполняет вычисление утла γ=|α1-α2| между ними и проверку удовлетворения значения данного угла условию 30°<γ=γоп<120°.
Если это условие не выполняется, то система продолжает работать в режиме ожидания поступления очередного пеленга с выхода [1] БП.
После поступления на вход 1 УЗ вновь полученного (очередного) пеленга его параметры запоминаются, затем подаются на вход 1 УС1, которое выполняет вышеперечисленные операции.
В случае попадания угла γ в указанный диапазон углов пересечения, соответствующие два пеленга считаются опорными. Значения опорных пеленгов αоп1(2) и соответствующих им координат точек пеленгования xoп1(2), yоп1(2) с выхода [1] УС1, а также параметры остальных пеленгов αi, хi, уi c выхода [1] УЗ подаются на вход 1 и вход 2 УВ1 соответственно, которое вычисляет опорные координаты  ИРИ по формулам (1, 2), а также радиус ДО согласно (5) и угловой размер ДО Δβiт=|βiт1-βiт2| для точки пеленгования по линии траверза (применяется только в прототипе).
ИРИ по формулам (1, 2), а также радиус ДО согласно (5) и угловой размер ДО Δβiт=|βiт1-βiт2| для точки пеленгования по линии траверза (применяется только в прототипе).
Далее с выхода [2] УВ1на вход 2 УВ2 поступают значения а с выхода [1] УЗ на вход 1УВ2 - параметры измеренных пеленгов αi, xi, yi, которое вычисляет угловой размер ДО Δβi=|βi1-βi2| для каждой текущей точки пеленгования (применяется в заявляемой системе).
Затем с выхода [2] УВ1 на вход 2 УС2 поступают значения βiт1, βiт2, а с выхода [1] УВ2 на вход 3УС2 - βi1, βi2. Одновременно с выхода [1] УЗ на вход 1 УС2 подаются параметры измеренных пеленгов αi, xi, yi.
По этим данным УС2 реализует проверку попадания текущих пеленгов в пределы сектора βiт1≤αi≤βiт2 (применяется только в прототипе) и в пределы сектора βi1≤αi≤βi2 (применяется в заявляемой системе), а также формирует список отождествленных с ИРИ пеленгов и соответствующих им координат точек пеленгования V=[α1, х1, у1; …αi, хi, уi; …αI, хI, yI] в интересах потребителей.
Реализация заявляемого технического решения, включающего адаптацию радиуса ДО ИРИ к текущей точке пеленгования и обработку в реальном масштабе времени, позволит существенно повысить вероятность правильного отождествления пеленгов и, благодаря этому, точность определения МП ИРИ, а также оперативность решения воздушными одно- и многопозиционными угломерными системами задач радиомониторинга.
ЛИТЕРАТУРА
1. Мельников Ю.П., Попов С.В. Радиотехническая разведка. - М.: Радиотехника, 2008.
2. Гребенников В.Б., Меркулов В.И., Тетеруков А.Г. Алгоритм многоцелевого сопровождения объектов в пассивной многопозиционной радиолокационной системе // Успехи современной радиоэлектроники. 2016. №2.
3. Уфаев В.А. Синтез алгоритмов межпериодной идентификации результатов синхронного многопозиционного пеленгования // Антенны. 2016. Вып. 6 (226).
4. Корн Г., Корн Т. Справочник по математике для научных работников и инженеров. Определения, теоремы, формулы. М.: Наука, 1974.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ пространственного отождествления пеленгов с наземными источниками радиоизлучения | 2020 |
|
RU2731682C1 |
| Способ комплексирования пеленга и координат источника радиоизлучения | 2022 |
|
RU2799498C1 |
| СПОСОБ СТРОБОВОГО ОТОЖДЕСТВЛЕНИЯ СИГНАЛОВ С ИСТОЧНИКАМИ РАДИОИЗЛУЧЕНИЯ В МНОГОЦЕЛЕВОЙ ОБСТАНОВКЕ | 2014 |
|
RU2557784C1 |
| Способ стробового отождествления сигналов с источниками радиоизлучения в многоцелевой обстановке | 2020 |
|
RU2752863C1 |
| Способ определения координат источников радиосигналов с взаимно перекрывающимися спектрами | 2024 |
|
RU2834966C1 |
| Способ одноэтапного адаптивного определения координат источников радиоизлучений | 2021 |
|
RU2768011C1 |
| Способ определения географических координат источников радиоизлучения в многоцелевой обстановке | 2021 |
|
RU2773307C1 |
| СПОСОБ ОТОЖДЕСТВЛЕНИЯ ПЕЛЕНГОВ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ В УГЛОМЕРНЫХ ДВУХПОЗИЦИОННЫХ ПАССИВНЫХ РАДИОЛОКАЦИОННЫХ СИСТЕМАХ | 2004 |
|
RU2253126C1 |
| СПОСОБ И УСТРОЙСТВО КОРРЕЛЯЦИОННОГО ОТОЖДЕСТВЛЕНИЯ ПЕЛЕНГОВ | 2006 |
|
RU2350977C2 |
| Способ обнаружения и азимутального пеленгования наземных источников радиоизлучения с летно-подъемного средства | 2020 |
|
RU2732505C1 |
Изобретение относится к пассивной радиолокации и может использоваться в одно- и многопозиционных системах воздушного радиомониторинга для повышения эффективности отождествления пеленгов с наземными источниками радиоизлучения (ИРИ). Достигаемый технический результат – повышение вероятности правильного отождествления пеленгов и точность определения местоположения ИРИ. Указанный результат в способе адаптивного пространственного отождествления пеленгов с наземными ИРИ достигается за счет того, что бортовой станцией радиомониторинга в процессе полета летательного аппарата определяют пеленги αi на ИРИ из точек xi, yi (i-я точка). Первый пеленг из полученной группы последовательно сравнивают с другими до тех пор, пока угол их пересечения не превзойдет заданную величину. Два пеленга, отвечающих указанному условию, считают опорными и находят координаты 
 точки их пересечения. Относительно опорной точки строят доверительную область (ДО); отождествляют попадающие в ДО пеленги с ИРИ. Для каждой текущей (i-й) точки пеленгования вычисляют адаптированные к ней радиус и угловой размер ДО ИРИ; отождествляют попадающие в адаптированную ДО пеленги с ИРИ. Операции по обработке и отождествлению пеленгов с ИРИ выполняют в реальном масштабе времени. Система, реализующая способ, содержит бортовой пеленгатор, навигационную систему, устройство запоминания, два устройства сравнения, два устройства вычисления, определенным образом выполненные и соединенные между собой. Система пространственного отождествления пеленгов с наземными источниками радиоизлучения может быть реализована в рамках бортовой вычислительной системы. 2 н.п. ф-лы, 10 ил., 8 табл.
точки их пересечения. Относительно опорной точки строят доверительную область (ДО); отождествляют попадающие в ДО пеленги с ИРИ. Для каждой текущей (i-й) точки пеленгования вычисляют адаптированные к ней радиус и угловой размер ДО ИРИ; отождествляют попадающие в адаптированную ДО пеленги с ИРИ. Операции по обработке и отождествлению пеленгов с ИРИ выполняют в реальном масштабе времени. Система, реализующая способ, содержит бортовой пеленгатор, навигационную систему, устройство запоминания, два устройства сравнения, два устройства вычисления, определенным образом выполненные и соединенные между собой. Система пространственного отождествления пеленгов с наземными источниками радиоизлучения может быть реализована в рамках бортовой вычислительной системы. 2 н.п. ф-лы, 10 ил., 8 табл.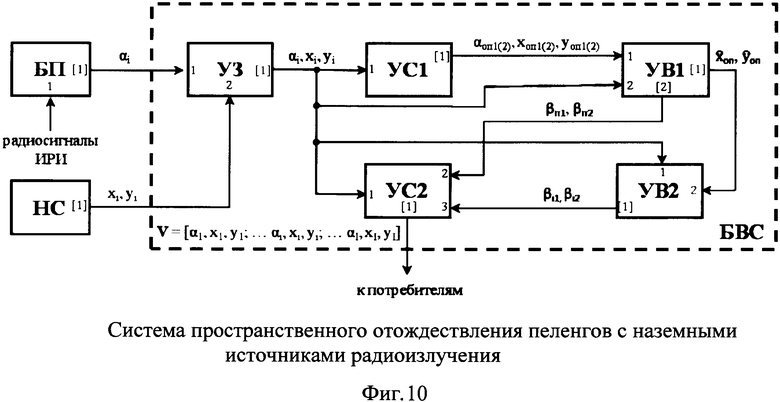
1. Адаптивный способ пространственного отождествления пеленгов с наземными источниками радиоизлучения (ИРИ), заключающийся в том, что бортовой станцией радиомониторинга (СРМ) в процессе полета летательного аппарата последовательно осуществляют пеленгование ИРИ из точек xi, yi (i-я точка) для определения пеленгов по азимуту αi; после получения группы пеленгов берут первый пеленг и последовательно сравнивают с другими до тех пор, пока угол их пересечения γ не удовлетворит условию 30°<γ=γоп<120°, где  два пеленга, отвечающих указанному условию, считают опорными и находят координаты
два пеленга, отвечающих указанному условию, считают опорными и находят координаты  точки их пересечения; относительно этой точки пересечения строят доверительную область (ДО), радиус Rдо которой вычисляют по формуле
точки их пересечения; относительно этой точки пересечения строят доверительную область (ДО), радиус Rдо которой вычисляют по формуле  где Dт - дальность до ИРИ по линии траверза, σα - среднеквадратическая ошибка измерения пеленгов; отождествляют попадающие в ДО пеленги с ИРИ, отличающийся тем, что для каждой текущей (i-й) точки пеленгования вычисляют радиус ДО ИРИ Rдoi из формулы Рдов мп=1-exp(-R2доi/2σ2αDi2), где Рдов мп - заданная доверительная вероятность попадания истинного местоположения ИРИ в ДО, σα - среднеквадратическая ошибка измерения пеленгов, Di - дальность до ИРИ из текущей (i-й) точки пеленгования, и угловой размер ДО (сектор)
где Dт - дальность до ИРИ по линии траверза, σα - среднеквадратическая ошибка измерения пеленгов; отождествляют попадающие в ДО пеленги с ИРИ, отличающийся тем, что для каждой текущей (i-й) точки пеленгования вычисляют радиус ДО ИРИ Rдoi из формулы Рдов мп=1-exp(-R2доi/2σ2αDi2), где Рдов мп - заданная доверительная вероятность попадания истинного местоположения ИРИ в ДО, σα - среднеквадратическая ошибка измерения пеленгов, Di - дальность до ИРИ из текущей (i-й) точки пеленгования, и угловой размер ДО (сектор)  где βi1, (βi2) - угол наклона первой (второй) касательной к ДО из текущей (i-й) точки пеленгования, в пределах которого происходит попадание пеленга в ДО; проверяют для каждой текущей точки пеленгования попадание измеренного пеленга в пределы сектора βi1≤αi≤βi2; отождествляют попадающие в ДО пеленги с ИРИ; при этом операции по обработке и отождествлению пеленгов с ИРИ выполняют по мере их измерения в реальном масштабе времени.
где βi1, (βi2) - угол наклона первой (второй) касательной к ДО из текущей (i-й) точки пеленгования, в пределах которого происходит попадание пеленга в ДО; проверяют для каждой текущей точки пеленгования попадание измеренного пеленга в пределы сектора βi1≤αi≤βi2; отождествляют попадающие в ДО пеленги с ИРИ; при этом операции по обработке и отождествлению пеленгов с ИРИ выполняют по мере их измерения в реальном масштабе времени.
2. Система пространственного отождествления пеленгов с наземными источниками радиоизлучения, реализующая способ по п. 1, содержащая бортовой пеленгатор (БП) для измерения пеленгов по азимуту αi на ИРИ, навигационную систему (НС) для определения координат xi, yi летательного аппарата, устройство запоминания (УЗ) осуществляет запоминание измеренных пеленгов на ИРИ и координат точек пеленгования, устройство сравнения (УС1) реализует проверку попадания измеренных пеленгов в диапазон опорных пеленгов, устройство сравнения (УС2), устройство вычисления (УВ1) для вычисления по двум опорным пеленгам и соответствующим им координатам точек пеленгования опорных координат ИРИ, а также радиуса ДО и углового размера ДО (сектора)  для точки пеленгования по линии траверза; при этом на вход 1 БП поступают сигналы от ИРИ, выход 1 БП соединен с входом 1 УЗ, выход 1 НС соединен с входом 2 УЗ, выход 1 УЗ соединен с входом 1 УС1, входом 2 УВ1 и с входом 1 УС2, выход 1 УС 1 соединен с входом 1 УВ1, выход 2 УВ1 соединен с входом 2 УС2, отличающаяся тем, что дополнительно содержит устройство вычисления (УВ2) с функцией вычисления по координатам точек пеленгования и опорным координатам ИРИ радиуса ДО и углового размера ДО (сектора)
для точки пеленгования по линии траверза; при этом на вход 1 БП поступают сигналы от ИРИ, выход 1 БП соединен с входом 1 УЗ, выход 1 НС соединен с входом 2 УЗ, выход 1 УЗ соединен с входом 1 УС1, входом 2 УВ1 и с входом 1 УС2, выход 1 УС 1 соединен с входом 1 УВ1, выход 2 УВ1 соединен с входом 2 УС2, отличающаяся тем, что дополнительно содержит устройство вычисления (УВ2) с функцией вычисления по координатам точек пеленгования и опорным координатам ИРИ радиуса ДО и углового размера ДО (сектора)  для каждой текущей точки пеленгования; выход 1 УЗ соединен с входом 1 УВ2, выход 1 УВ1 соединен с входом 2 УВ2, выход 1 УВ2 соединен с входом 3 УС2; при этом в УС2 реализуется проверка попадания текущего пеленга в пределы сектора βiт1≤αi≤βiт2 и в пределы сектора βi1≤αi≤βi2, а также формирование списка значений отождествленных пеленгов и соответствующих им координат точек пеленгования V=[α1, х1, y1; … αi, хi, yi; … αI, xI, yI].
для каждой текущей точки пеленгования; выход 1 УЗ соединен с входом 1 УВ2, выход 1 УВ1 соединен с входом 2 УВ2, выход 1 УВ2 соединен с входом 3 УС2; при этом в УС2 реализуется проверка попадания текущего пеленга в пределы сектора βiт1≤αi≤βiт2 и в пределы сектора βi1≤αi≤βi2, а также формирование списка значений отождествленных пеленгов и соответствующих им координат точек пеленгования V=[α1, х1, y1; … αi, хi, yi; … αI, xI, yI].
| СПОСОБ ОТОЖДЕСТВЛЕНИЯ ПЕЛЕНГОВ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ В УГЛОМЕРНЫХ ДВУХПОЗИЦИОННЫХ ПАССИВНЫХ РАДИОЛОКАЦИОННЫХ СИСТЕМАХ | 2004 |
|
RU2253126C1 |
| СПОСОБ СТРОБОВОГО ОТОЖДЕСТВЛЕНИЯ СИГНАЛОВ С ИСТОЧНИКАМИ РАДИОИЗЛУЧЕНИЯ В МНОГОЦЕЛЕВОЙ ОБСТАНОВКЕ | 2014 |
|
RU2557784C1 |
| ТРИАНГУЛЯЦИОННО-ГИПЕРБОЛИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ РАДИОИЗЛУЧАЮЩИХ ВОЗДУШНЫХ ОБЪЕКТОВ В ПРОСТРАНСТВЕ | 2012 |
|
RU2503969C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ КООРДИНАТ И ПАРАМЕТРОВ ЦЕЛИ В МНОГОПОЗИЦИОННОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЕ | 2006 |
|
RU2330306C1 |
| WO 2006114426 A1, 02.11.2006 | |||
| JP 8201501 A, 09.08.1996 | |||
| US 20080079542 A1, 03.04.2008. | |||

