Изобретение относится к механизмам манипуляторов с несколькими степенями свободы и может быть использовано в машиностроении и медицине в качестве привода рабочих органов с изменяемой траекторией движения, например, в экскаваторах-погрузчиках, антеннах рефлекторов, автоматических линиях и обрабатывающих центрах для групповых технологических операций.
Известен шарнирно-рычажный механизм манипулятора в виде платформы Стюарта, содержащий 6 приводных поступательных двигателей в виде гидроцилиндров и 12 сферических шарниров с пересекающимися строго в одной точке осями вращения рычагов (книга Коловский М.З. и др. Теория механизмов и машин. - М.: Изд. Центр «Академия», 2006, стр. 19, рис. 1.13) - аналог.
Недостатками известного механизма манипулятора являются:
1. Сложная конструкция, а также высокая трудоемкость изготовления и точной сборки 12 сферических шарниров.
2. Сложная система управления одновременно всеми 6-ю приводными двигателями для перемещения выходной платформы.
3. Возможность привода только одного рабочего органа.
4. Большие пространственные габариты, вес и стоимость.
Наиболее близким по технической сущности и достигаемому эффекту к предлагаемому изобретению является механизм манипулятора, содержащий опорное основание и приводное устройство его кинематической связи в виде 25 рычажных звеньев, 24 цилиндрическими шарнирами с пересекающимися осями вращения, требующими для управления только одним рабочим органом применения 6 приводных вращательных двигателей (книга Смелягин А.И. «Структура машин, механизма и конструкций» / Учебное пособие. - Москва: ИНФА_М, 2019, с. 154, рис. 2.74 со схемой манипулятора) - прототип.
Недостатками указанного механизма манипулятора являются:
1) Сложная конструкция, требующая применения 12 сложных сферических шарниров и 6 приводных двигателей для изменения углов поворота этих шарниров.
2) Сложная система управления положением рабочего органа требует одновременной работы всех 6 приводных двигателей из-за связанной кинематики движений механизма манипулятора.
3) Большие пространственные габариты механизма манипулятора как в рабочем, так и в нерабочем положениях манипулятора.
4) Большая трудоемкость изготовления и сборки узлов с непараллельными осями шарниров.
В основу изобретения положена техническая задача, заключающаяся в упрощении конструкции; снижении числа приводных двигателей, а также снижении ее габаритов (как в рабочем, так и в нерабочем положении манипулятора) - на основе реализации складывающейся симметричной (ymmetry) конструкции S-механизма манипулятора, звенья которого расположены в одной плоскости и собираются на простых цилиндрических шарнирах с параллельными между собой осями вращения.
Получение технического результата достигается за счет того, что приводное устройство кинематической связи механизма манипулятора выполнено в виде шарнирного шестизвенника с последовательно расположенными внутри упомянутого шестизвенника вдоль вертикальной оси симметрии шарнирными структурными модулями, один из которых выполнен в виде кинематически связанных между собой двух трехшарнирных звеньев треугольной формы, а другой структурный модуль выполнен в виде шарнирного четырехзвенника, звенья которого соединены между собой через цилиндрические шарниры с взаимно параллельными осями вращения и образуют при их сборке четырехшатунный параллелограмм или антипараллелограмм.
Сущность изобретения поясняется чертежами на фиг. 1, фиг. 2, фиг. 3, фиг. 4, фиг. 5, фиг. 6, фиг. 7, фиг. 8, фиг. 9, фиг. 10 и фиг. 11.
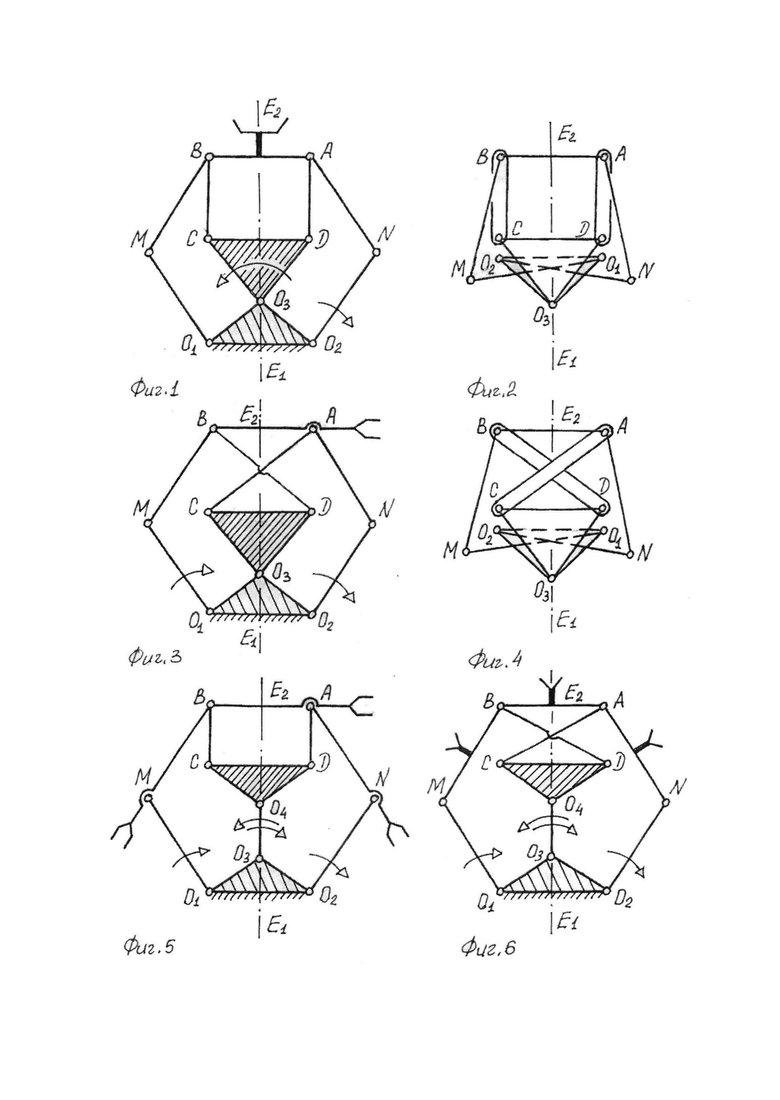
На фиг. 1 и фиг. 2 изображен общий вид складывающегося симметричного S-механизма манипулятора в рабочем положении (фиг. 1) и в нерабочем положении, быстро реализуемом без разборки и сборки всей многозвенной кинематической цепи (фиг. 2). Механизм манипулятора содержит опорное основание и приводное устройство кинематической связи, которое выполнено в виде шарнирного шестизвенника ABMO1O2N с последовательно расположенными внутри этого шестизвенника вдоль вертикальной оси симметрии Е1-Е2 шарнирными структурными модулями, один из которых выполнен в виде двух спаренных между собой (через однократный шарнир O3) трехшарнирных звеньев треугольной формы O1O2O3 и O3CD, а другой структурный модуль выполнен в виде шарнирного четырехзвенника ABCD, звенья которого соединены между собой через цилиндрические шарниры А, В, С и D с взаимно параллельными осями вращения и образуют при их сборке четырехшатунный параллелограмм.
Одно из трехшарнирных звеньев O1O2O3 сблокировано со стороной O1O2 шарнирного шестизвенника ABMO1O2N и выполнено в виде опорного основания, а другое трехшарнирное звено треугольной формы O3CD сблокировано со стороной CD шарнирного четырехзвенника ABCD. При этом противоположная CD сторона АВ шарнирного четырехзвенника ABCD подвижно соединена со сторонами NA и MB шарнирного шестизвенника ABMO1O2N через два двойных цилиндрических шарнира А и В, составленных из соосно расположенных одноподвижных вращательных кинематических пар.
Механизм манипулятора выполнен с двумя приводными вращательными кинематическими парами, одна из которых совмещена с цилиндрическим шарниром O2 шестизвенника ABMO1O2N, а другая приводная вращательная кинематическая пара совмещена с цилиндрическим шарниром O3, соединяющим трехшарнирные звенья O1O2O3 и O3CD. Рабочий орган манипулятора с двумя степенями свободы закреплен на звене АВ по вертикали.
На фиг. 3 и фиг. 4 представлен вариант выполнения одного из структурных модулей в виде шарнирного четырехзвенника ABCD, звенья которого образуют при их сборке четырехшатунный антипараллелограмм. Механизм манипулятора на фиг. 3 представлен в рабочем положении, а на фиг. 4 - в нерабочем положении, достигаемом за счет его быстрого складывания вокруг вертикальной оси симметрии Е1-Е2 без разборки всей кинематической цепи устройства.
Механизм манипулятора выполнен с двумя приводными вращательными кинематическими парами O1 и O2, совмещенными с цилиндрическими шарнирами, соединяющими вершины О1 и O2 трехшарнирного звена O1O2O3 со звеньями MO1 и NO2 шарнирного шестизвенника ABMO1O2N - для образования складывающегося симметричного механизма манипулятора с двумя степенями свободы, в котором рабочий орган закреплен на звене АВ по горизонтали.
На фиг. 5 и фиг. 6 представлен вариант выполнения одного из структурных модулей в виде двух трехшарнирных звеньев треугольной формы O1O2O3 и O4CD, которые подвижно соединены между собой посредством дополнительного двухшарнирного рычажного звена O3O4, расположенного на вертикальной оси симметрии Е1-Е2 и выполненного с параллельными между собой осями цилиндрических шарниров O3 и O4 для образования симметричного механизма манипулятора с тремя степенями свободы. При этом в варианте механизма на фиг. 5 другой структурный модуль в виде шарнирного четырехзвенника ABCD выполнен в виде четырехшатунного параллелограмма, а в варианте механизма на фиг. 6 другой структурный модуль в виде шарнирного четырехзвенника ABCD выполнен в виде четырехшатунного антипараллелограмма.
Механизмы манипулятора на фиг. 5 и фиг. 6 выполнены с тремя приводными вращательными кинематическими парами, соответственно совмещенными с каждым из трех цилиндрических шарниров O1, O2, O3 трехшарнирного звена O1O2O3, а манипулятор выполнен с тремя рабочими органами, закрепленными на смежных звеньях АВ, ВМ и AN шарнирного шестизвенника ABMO1O2N.
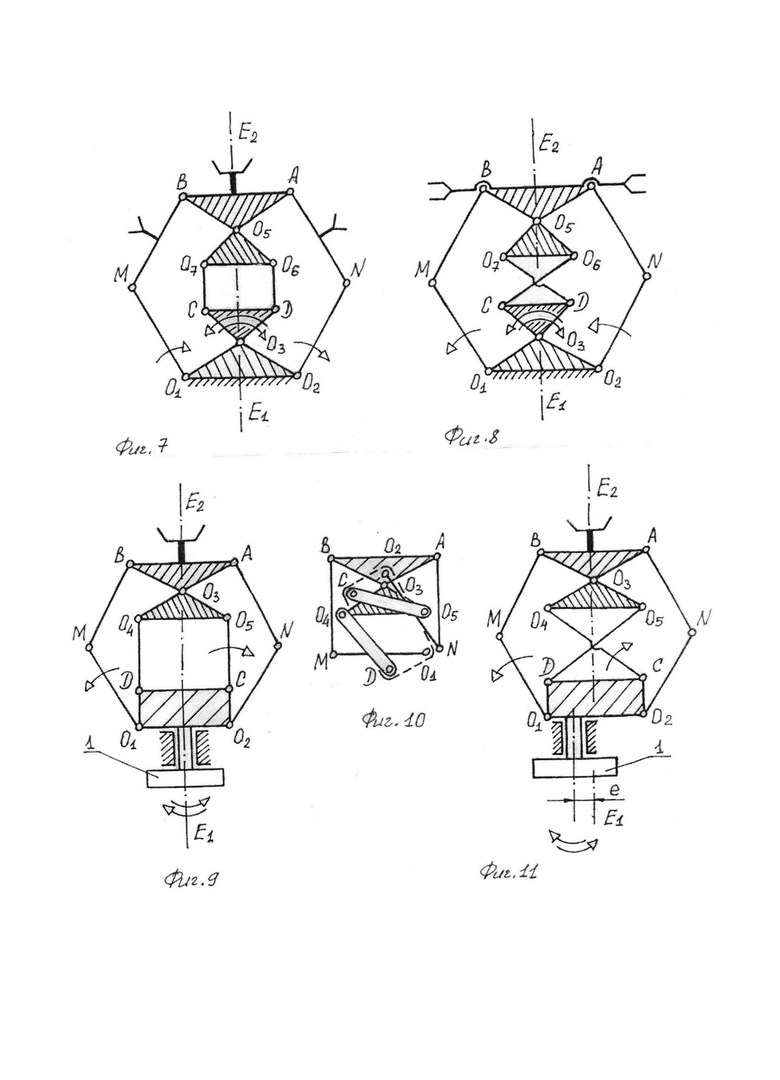
На фиг. 7 и фиг. 8 представлен вариант выполнения приводного устройства кинематической связи в виде двух структурных модулей, каждый из которых составлен из двух спаренных трехшарнирных звеньев треугольной формы O1O2O3 в сочетании с CDO3, а также O5O6O7 в сочетании с O5AB. При этом в варианте механизма на фиг. 7 другой структурный модуль в виде шарнирного четырехзвенника CDO6O7 выполнен в виде четырехшатунного параллелограмма, а в варианте механизма на фиг. 8 другой структурный модуль в виде шарнирного четырехзвенника CDO6O7 выполнен в виде четырехшатунного антипараллелограмма.
Оба механизма манипулятора на фиг. 7 и фиг. 8 выполнены с тремя приводными вращательными кинематическими парами, соответственно совмещенными с каждым из трех цилиндрических шарниров O1, O2, O3 трехшарнирного звена O1O2O3, а манипулятор выполнен (фиг. 7) с тремя рабочими органами, закрепленными на смежных звеньях АВ, ВМ и AN шарнирного шестизвенника ABMO1O2N, или выполнен с одним двусторонним рабочим органом, закрепленном на звене АВ (фиг. 8).
На фиг. 9 представлен вариант выполнения механизма манипулятора, в котором структурный модуль в виде параллелограммного шарнирного четырехзвенника O4O5CD кинематически связан со стороной O1O2 шарнирного шестизвенника O1O2NABM посредством дополнительного четырехшарнирного звена O1O2CD, выполненного в виде опорного основания, которое установлено на поворотную платформу 1 с приводом от вращательного двигателя вокруг вертикальной оси вращения. Представленный на фиг. 9 вариант S-механизма изображен в рабочем положении и имеет две степени свободы.
На фиг. 10 представлено нерабочее положение сложенного компактного S-механизма, получаемое из рабочего положения на фиг. 9 путем углового поворота его звеньев между собой и без разборки всей его замкнутой кинематической цепи (т.е. без разрыва цилиндрических шарниров).
На фиг. 11 представлен вариант выполнения механизма манипулятора, в котором структурный модуль в виде антипараллелограммного шарнирного четырехзвенника O4O5CD кинематически связаны со стороной O1O2 шарнирного шестизвенника O1O2NABM посредством дополнительного четырехшарнирного звена O1O2CD, выполненного в виде опорного основания, которое установлено на поворотную платформу 1 с приводом от вращательного двигателя вокруг вертикальной оси вращения, например, совмещенной с вертикальной осью симметрии Е1-Е2 (при эксцентриситете е=0) или эксцентрично (е>0) расположенной относительно последней.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШАРНИРНЫЙ МЕХАНИЗМ | 2021 |
|
RU2753064C1 |
| СКЛАДЫВАЮЩИЙСЯ ШАРНИРНЫЙ МАНИПУЛЯТОР | 2021 |
|
RU2765030C1 |
| ШАРНИРНЫЙ МЕХАНИЗМ ИЗМЕНЯЕМОЙ СТРУКТУРЫ | 2021 |
|
RU2765386C1 |
| ПРОСТРАНСТВЕННЫЙ ПАРАЛЛЕЛОГРАММНЫЙ МАНИПУЛЯТОР-ТРИПОД | 2023 |
|
RU2824543C1 |
| СИММЕТРИЧНЫЙ ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР С ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ | 2021 |
|
RU2776578C1 |
| ПАРАЛЛЕЛОГРАММНЫЙ ПРЯМОЛИНЕЙНО-НАПРАВЛЯЮЩИЙ МЕХАНИЗМ | 2021 |
|
RU2769002C1 |
| ПРОСТРАНСТВЕННЫЙ МАНИПУЛЯТОР | 2021 |
|
RU2758377C1 |
| МЕХАНИЗМ ПЛАВАЮЩЕГО ШАРНИРНОГО ПАРАЛЛЕЛОГРАММА | 2021 |
|
RU2765387C1 |
| ПЛАТФОРМЕННЫЙ СТЫКОВОЧНЫЙ МАНИПУЛЯТОР | 2020 |
|
RU2751781C1 |
| КОПИРУЮЩИЙ МАНИПУЛЯТОР | 2020 |
|
RU2751779C1 |
Изобретение относится к механизмам манипуляторов с несколькими степенями свободы и может быть использовано в машиностроении и медицине в качестве привода рабочих органов с изменяемой траекторией движения, например, в экскаваторах-погрузчиках, антеннах рефлекторов, автоматических линиях и обрабатывающих центрах для групповых технологических операций. Складывающийся симметричный механизм манипулятора содержит опорное основание и приводное устройство кинематической связи опорного основания с исполнительными рабочими органами. Приводное устройство кинематической связи выполнено в виде шарнирного шестизвенника с последовательно расположенными внутри него вдоль вертикальной оси симметрии шарнирными структурными модулями. Один из структурных модулей выполнен в виде кинематически связанных между собой двух трехшарнирных звеньев треугольной формы, а другой структурный модуль выполнен в виде шарнирного четырехзвенника, звенья которого соединены между собой через цилиндрические шарниры с взаимно параллельными осями вращения и образуют при их сборке четырехшатунный параллелограмм или антипараллелограмм. Обеспечивается упрощение конструкции, снижение числа приводных двигателей, а также снижение габаритов. 8 з.п. ф-лы, 11 ил.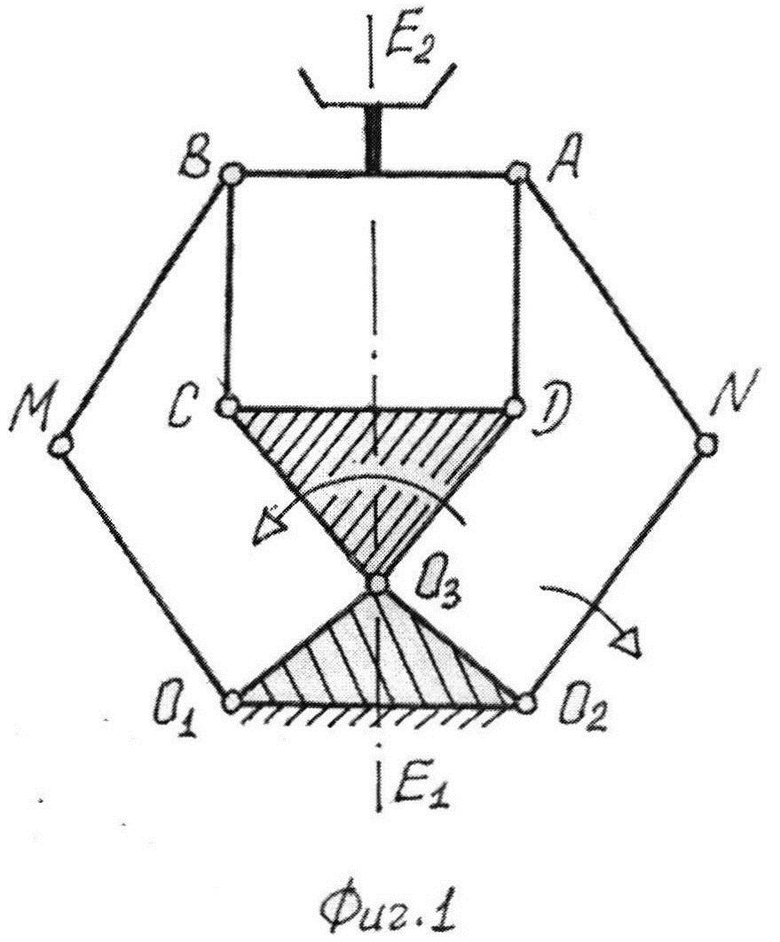
1. Складывающийся симметричный механизм манипулятора, содержащий опорное основание и приводное устройство кинематической связи опорного основания с исполнительными рабочими органами, отличающийся тем, что приводное устройство кинематической связи выполнено в виде шарнирного шестизвенника с последовательно расположенными внутри упомянутого шестизвенника вдоль вертикальной оси симметрии шарнирными структурными модулями, один из которых выполнен в виде кинематически связанных между собой двух трехшарнирных звеньев треугольной формы, а другой структурный модуль выполнен в виде шарнирного четырехзвенника, звенья которого соединены между собой через цилиндрические шарниры с взаимно параллельными осями вращения и образуют при их сборке четырехшатунный параллелограмм или антипараллелограмм.
2. Механизм манипулятора по п. 1, отличающийся тем, что одно из трехшарнирных звеньев треугольной формы сблокировано с одной из сторон шарнирного шестизвенника и выполнено в виде опорного основания, а другое из трехшарнирных звеньев треугольной формы сблокировано с одной из сторон шарнирного четырехзвенника, при этом противоположная сторона шарнирного четырехзвенника подвижно соединена с другими сторонами шарнирного шестизвенника через два двойных цилиндрических шарнира, составленных из соосно расположенных одноподвижных вращательных кинематических пар.
3. Механизм манипулятора по п. 2, отличающийся тем, что в приводном устройстве кинематической связи два трехшарнирных звена треугольной формы спарены между собой через однократный шарнир для образования симметричного механизма манипулятора с двумя степенями свободы.
4. Механизм манипулятора по п. 2, отличающийся тем, что в приводном устройстве кинематической связи два трехшарнирных звена треугольной формы подвижно соединены между собой посредством дополнительного двухшарнирного рычажного звена, расположенного на вертикальной оси симметрии и выполненного с параллельными между собой осями цилиндрических шарниров, для образования симметричного механизма манипулятора с тремя степенями свободы.
5. Механизм манипулятора по п. 3, отличающийся тем, что он выполнен с двумя приводными вращательными кинематическими парами, совмещенными с цилиндрическими шарнирами, соединяющими вершины одного из трехшарнирных звеньев со звеньями шарнирного шестизвенника.
6. Механизм манипулятора по п. 3, отличающийся тем, что он выполнен с двумя приводными вращательными кинематическими парами, одна из которых совмещена с цилиндрическим шарниром шестизвенника, а другая приводная вращательная пара совмещена с цилиндрическим шарниром, соединяющим между собой спаренные трехшарнирные звенья треугольной формы.
7. Механизм манипулятора по п. 4, отличающийся тем, что он выполнен с тремя приводными вращательными кинематическими парами, соответственно совмещенными с каждым из трех цилиндрических шарниров трехшарнирного звена треугольной формы, сблокированного с одной из сторон шарнирного шестизвенника.
8. Механизм манипулятора по п. 1, отличающийся тем, что структурный модуль в виде шарнирного четырехзвенника кинематически связан со стороной шарнирного шестизвенника посредством дополнительного четырехшарнирного звена, выполненного в виде опорного основания для образования механизма манипулятора с двумя степенями свободы.
9. Механизм манипулятора по п. 1, отличающийся тем, что звенья шарнирного шестизвенника выполнены рычажными с возможностью установки на них исполнительных рабочих органов, а опорное основание механизма манипулятора выполнено с возможностью установки на поворотную платформу с приводом от вращательного двигателя вокруг вертикальной оси вращения.
| СКЛАДЫВАЮЩИЙСЯ ГРУЗОПОДЪЕМНЫЙ МАНИПУЛЯТОР ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ | 2021 |
|
RU2780824C1 |
| ПРОСТРАНСТВЕННЫЙ ПЛАТФОРМЕННЫЙ СКЛАДЫВАЮЩИЙСЯ МАНИПУЛЯТОР | 2021 |
|
RU2759552C1 |
| Механизм прямолинейного перемещения объекта | 1988 |
|
SU1576315A1 |
| KR 20010001319 A, 05.01.2001 | |||
| US 7367772 B2, 06.05.2008. | |||

