Изобретение относится к рычажным механизмам и может найти применение в автоматических линиях и транспортирующих системах для обеспечения точного позиционирования перемещения в трех измерениях подвижной горизонтальной платформы с установленными на ней рабочим органом, обрабатывающим инструментом или транспортируемой деталью.
Известен платформенный механизм, содержащий стойку и подвижную прямоугольную платформу, подвижно соединенные между собой посредством двух симметричных рычажных ромбов, раздельно установленных между собой на этой платформе (схема рычажного платформенного механизма в книге А.Ф. Крайнева «Словарь-справочник по механизмам/ М.: Изд-во «Машиностроение», 1987, с. 313, рис. б) - 2-издание) - аналог.
Недостатками известного платформенного механизма являются:
1. Ограниченные двигательные возможности платформенного механизма, реализующего движение платформы только в двух измерениях - одно поступательное перемещение и одно вращательное перемещение, приводящее к угловому перекосу платформы.
2. Возникающий угловой перекос подвижной горизонтальной платформы с установленными на ней рабочим органом или перемещаемой деталью снижает точность их позиционирования и поэтому недопустим в автоматических технологических линиях, обрабатывающих центрах и устройствах для позиционирования.
Наиболее близким по технической сущности и достигаемому эффекту к предлагаемому изобретению является платформенный механизм, содержащий опорное основание и подвижную платформ, которые выполнены в виде равносторонних треугольников и подвижно соединены между собой посредством шарнирного соединительного опорного устройства, выполненного в виде раздельно соединенных с подвижной платформой двухзвенных стержневых поворотных опор с раздельным приводом от трех монтируемых на опорном основании электродвигателей (схем платформенного механизм в статье Мирзаев Р.А., Смирнов Н.А., «Исследование кинематики манипулятора параллельной структуры (дельта-механизма)» Вестник Сибирского аэрокосмического гос.ун-та, вып. 4 (44), 2012, с. 47, общий вид механизма на рис. 1) - прототип.
Недостатками указанного платформенного механизма являются:
1. Платформенный механизм не обеспечивает точное горизонтальное позиционирование платформы из-за ее перекоса при вращении стержневых поворотных опор и согласно теории и эксперимента имеет очень узкую рабочую зону движения подвижной платформы с рабочим органом (представлена в виде сужающегося конуса в пределах угла, равного всего 20 градусов - в указанной статье СибГАУ, вып. 4(44), 2012, с. 49, рис. 4).
2. Сложный привод механизма не обеспечивает требуемое в автоматических линиях и транспортирующих системах сборочных конвейеров поступательное перемещение горизонтальной платформы в плоскости (по осям x и y), а также поворот этой платформы (вокруг оси Z), что ограничивает области его применения в технике и медицине.
3. Низкая жесткость двухзвенных стержневых поворотных опор снижает точность позиционирования подвижной платформы и ограничивает нагрузочную способность платформенного механизма.
В основу изобретения положена техническая задача, заключающаяся в обеспечении перемещения и точного позиционирования в горизонтальной плоскости подвижной платформы с рабочим органом в заданных трех измерениях, включающих поступательное перемещение платформы по осям x и y в одной горизонтальной плоскости и вращение вокруг вертикальной оси Z без каких-либо угловых перекосов платформы с установленным на ней рабочим органом, а также упрощении конструкции и снижении габаритов и веса платформенного механизма при увеличении его нагрузочной способности.
Получение технического результата достигается за счет того, что платформенный механизм содержит опорное основание и подвижную платформу в виде равносторонних треугольников, соединенных между собой посредством шарнирного соединительного опорного устройства, выполненного в виде соединенных между собой через вершины треугольной подвижной платформы трех замкнутых двухконтурных кинематических цепей, звенья которых выполнены в виде двухшарнирных соединительных рычагов и подвижно соединены между собой, а также с опорным основанием и подвижной платформой посредством двойных цилиндрических шарниров с параллельными между собой осями вращения, в внутри каждой замкнутой двухконтурной кинематической цепи шарнирного соединительного опорного устройства параллельно каждой из сторон треугольника подвижной платформы установлен гидропривод в виде подвижного гидроцилиндра с расположенным в нем поршнем со штоком.
Сущность изобретения поясняется чертежами на фиг. 1 и фиг. 2.
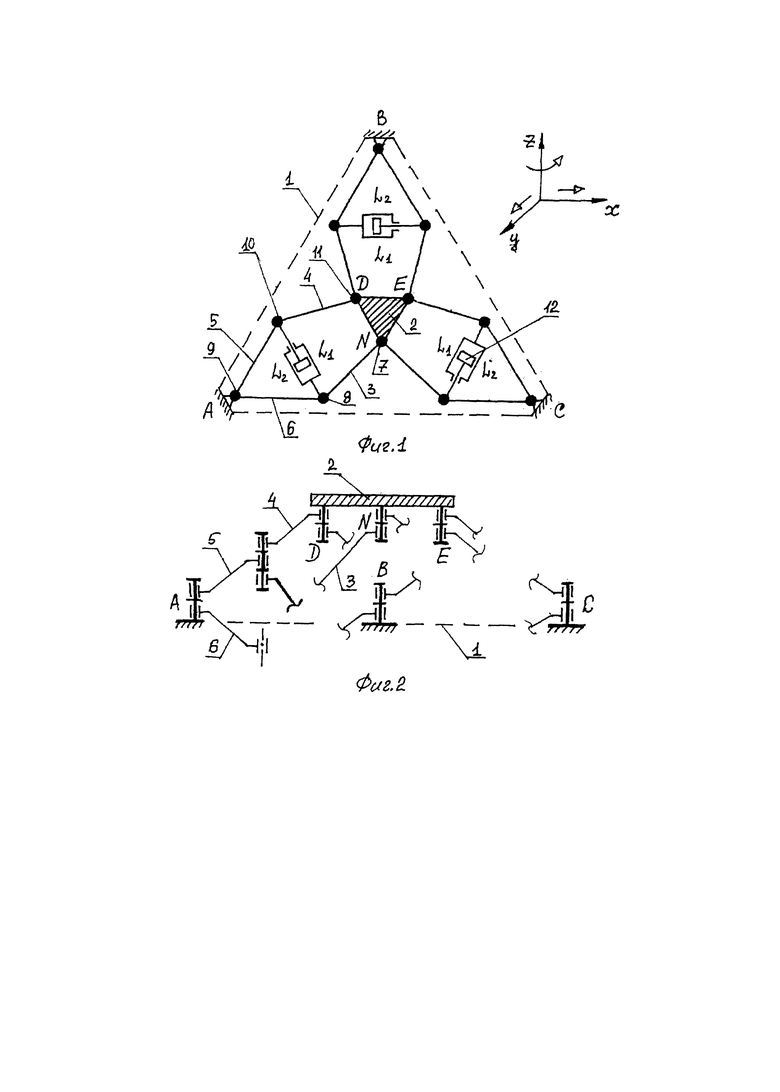
На фиг. 1 представлена общая структурная схема платформенного механизма.
На фиг. 2 представлена схема шарнирного соединения подвижной платформы с опорным основанием посредством двухшарнирных соединительных рычагов и двойных цилиндрических шарниров с параллельными осями вращения.
Платформенный механизм (фиг. 1) содержит опорное основание 1 и подвижную платформу 2, которые выполнены в виде равносторонних треугольников ABC и DEN, подвижно соединенных между собой посредством шарнирного соединительного опорного устройства через вершины D, E и N треугольной подвижной платформы 2 через три замкнутые двухконтурные кинематические цепи с контурами L1 и L2, звенья 3, 4, 5 и 6 которых выполнены в виде двухшарнирных соединительных рычагов с параллельно изогнутыми концами с вертикальными отверстиями двойных цилиндрических шарниров 7, 8, 9, 10 и 11 (фиг. 2) и подвижно соединены между собой, а также с опорным основанием 2 и подвижной платформой 2 через двойные цилиндрические шарниры 7, 8, 9, 10 и 11 с параллельными между собой осями вращения, а внутри каждой их трех замкнутых двухконтурных кинематических цепей AND, DNE и CEN (с контурами L1 и L2) параллельно каждой из сторон треугольника DEN подвижной платформы 2 установлен гидропривод в виде подвижного гидроцилиндра 12 с расположенным в нем поршнем и штоком.
Работа представленного платформенного механизма заключается в следующем.
При попеременной подаче рабочей жидкости в поршневую или штоковую полости гидроцилиндра 12 происходит изменение геометрии замкнутых контуров L1 и L2 в каждой из замкнутых двухконтурных кинематических цепей, что приводит к требуемому поступательному (по осям x и y) и вращательному (вокруг оси Z) перемещению подвижной платформы 2, что обеспечивает ее точное позиционирование с сохранением ее гарантированного горизонтального расположения вместе с установленным на ней рабочим органом.
Достигаемый в предлагаемом платформенном механизме положительный эффект заключается в следующем:
1. Упрощение конструкции, снижение ее габаритов и веса, и повышение жесткости и нагрузочной способности платформенного механизма за счет применения двухконтурных опорных устройств подвижной платформы.
2. Обеспечение требуемого поступательного в двух направлениях и вращательного перемещений подвижной платформы в заданной плоскости рабочего пространства с ее точным позиционированием за счет гарантированного сохранения горизонтального расположения платформы с установленным на ней рабочим органом, инструментом или деталью.
3. Три дополнительных вращательных перемещения подвижной платформы 2 в виде раздельного вращения вокруг каждой из параллельных вертикальных осей Z, проходящих через вершины А, В, С треугольного опорного основания 1 (Рис. 1), и еще три дополнительных раздельных поступательных перемещения (в горизонтальной плоскости) в направлении от центра опорного основания 1 и его вершинам А или В или С, что увеличивает до 9-ти число реализуемых в данном платформенном механизме перемещений подвижной платформы 2 и расширяет рабочее пространство ее движений с рабочим органом.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИММЕТРИЧНЫЙ ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР С ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ | 2021 |
|
RU2776578C1 |
| ШАРНИРНОЕ ЗАЖИМНОЕ УСТРОЙСТВО | 2019 |
|
RU2729690C1 |
| ПРОСТРАНСТВЕННЫЙ ПЛАТФОРМЕННЫЙ VIP-МАНИПУЛЯТОР | 2019 |
|
RU2722165C1 |
| ПЛОСКО-ПРОСТРАНСТВЕННЫЙ ТРЕХПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР | 2021 |
|
RU2774279C1 |
| ШАРНИРНЫЙ ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР | 2020 |
|
RU2751782C1 |
| ШАРНИРНЫЙ МЕХАНИЗМ | 2021 |
|
RU2753064C1 |
| ГРУЗОПОДЪЕМНЫЙ МАНИПУЛЯТОР | 2020 |
|
RU2737012C1 |
| ПЛАТФОРМЕННЫЙ МЕХАНИЗМ ОТНОСИТЕЛЬНОГО МАНИПУЛИРОВАНИЯ | 2021 |
|
RU2758391C1 |
| ПАРАЛЛЕЛОГРАММНЫЙ ПРЯМОЛИНЕЙНО-НАПРАВЛЯЮЩИЙ МЕХАНИЗМ | 2021 |
|
RU2769002C1 |
| ПЛАТФОРМЕННЫЙ РОБОТ | 2020 |
|
RU2751778C1 |
Изобретение относится к рычажным механизмам. Платформенный механизм содержит опорное основание и подвижную платформу, которые выполнены в виде равносторонних треугольников, подвижно соединенных между собой посредством шарнирного соединительного опорного устройства. Шарнирное соединительное опорное устройство выполнено в виде соединенных между собой через вершины треугольной подвижной платформы посредством трех замкнутых двухконтурных кинематических цепей, звенья которых выполнены в виде двухшарнирных соединительных рычагов и подвижно соединены между собой, а также с опорным основанием и подвижной платформой через двойные цилиндрические шарниры с параллельными между собой осями вращения. Внутри каждой замкнутой двухконтурной кинематической цепи шарнирного соединительного опорного устройства параллельно каждой из сторон треугольника подвижной платформы установлен гидропривод в виде подвижного гидроцилиндра с расположенным в нем поршнем со штоком. Обеспечивается упрощение конструкции платформенного механизма, снижение его габаритов и повышение жесткости при нагружении .1 з.п. ф-лы, 2 ил.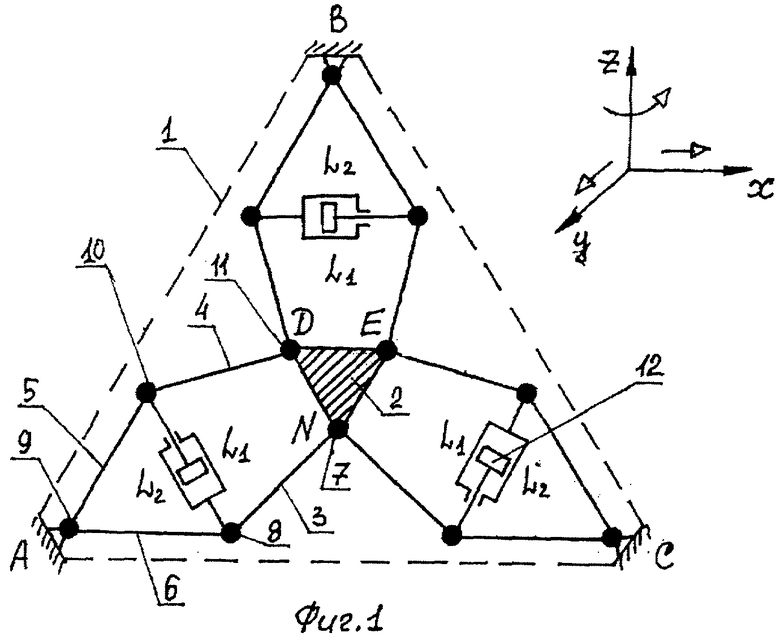
1. Платформенный механизм, содержащий опорное основание и подвижную платформу, которые выполнены в виде равносторонних треугольников, подвижно соединенных между собой посредством шарнирного соединительного опорного устройства, отличающийся тем, что шарнирное соединительное опорное устройство выполнено в виде соединенных между собой через вершины треугольной подвижной платформы посредством трех замкнутых двухконтурных кинематических цепей, звенья которых выполнены в виде двухшарнирных соединительных рычагов и подвижно соединены между собой, а также с опорным основанием и подвижной платформой через двойные цилиндрические шарниры с параллельными между собой осями вращения, а внутри каждой замкнутой двухконтурной кинематической цепи шарнирного соединительного опорного устройства параллельно каждой из сторон треугольника подвижной платформы установлен гидропривод в виде подвижного гидроцилиндра с расположенным в нем поршнем со штоком.
2. Платформенный механизм по п. 1, отличающийся тем, что двухшарнирные соединительные рычаги шарнирного соединительного опорного устройства выполнены с параллельно изогнутыми концами, которые содержат вертикальные отверстия для образования вращательных кинематических пар с параллельными осями вращения с другими звеньями замкнутой двухконтурной кинематической цепи.
| Погрузочно-разгрузочная рампа | 1983 |
|
SU1092118A1 |
| Эстакада для погрузки и выгрузки из транспортного средства животных | 1984 |
|
SU1227575A1 |
| CN 205151269 U, 13.04.2016 | |||
| CN 202880510 U, 17.04.2013. | |||

