Изобретение относится к машиностроению, в частности к платформенным механизмам параллельной структуры с несколькими степенями свободы, и может найти применение в разных областях техники и хирургии в качестве стационарных, переносных и подвесных манипуляционных устройств с заданной постоянной ориентацией перемещаемого рабочего органа во всем расширенном рабочем пространстве.
Известен пространственный платформенный манипулятор в виде «Платформы Стюарта», содержащий подвижную платформу с рабочим органом, перемещаемую одновременно шестью приводными двигателями со связанной кинематикой посредством шести сложных сферических шарниров с пересекающимися строго в одной точке осями вращения (книга Вульфсон И.И. и др. «Механика машин», Москва: Высшая школа, 1996 г., с. 28, рис. 1.20) - аналог.
Недостатками известного платформенного манипулятора являются сложность конструкции, низкая эксплуатационная эффективность в узкой рабочей зоне и сложность системы управления.
Наиболее близким к предлагаемому изобретению является пространственный манипулятор с тремя управляемыми степенями свободы перемещаемой платформы с рабочим органом, кинематически связанной через сферические шарниры с неподвижным опорным основанием (статья Мирзаев Р.А. и др. «Исследование кинематики манипулятора параллельной структуры (дельта-механизм)» // Вестник Сибирского госуд. аэрокосм. ун-та, 2012, Вып. 4, с. 46-50, рис. 1-4) - прототип.
Недостатками указанного платформенного манипулятора являются сложность конструкции, узкая рабочая зона (показанная на рис. 4 в упомянутой статье Мирзаева Р.А., 2012 г.), а также узкая функциональность и ограниченные области применения из-за возникающего углового поворота платформы с рабочим органом, что нарушает постоянство его ориентации в рабочем пространстве, требуемое при выполнении разных технологических операций, и приводит к изменению заданного вертикального углового или горизонтального расположения этого рабочего органа при его перемещении,
В основу изобретения положена техническая задача, заключающаяся в упрощении конструкции и системы управления, повышении эксплуатационной эффективности и обеспечении заданного постоянного ориентирования рабочего органа во всем расширенном рабочем пространстве манипулятора.
Получение технического результата достигается за счет того, что шарнирно-рычажное устройство привода рабочего органа выполнено в виде сборки из трех кинематически связанных между собой трехшарнирных звеньев, выполненных в виде равносторонних треугольников и представляющих собой последовательно расположенные по вертикали поворотную платформу, образующую с подвижной платформой плоскую замкнутую кинематическую цепь и присоединяемую к подвижной платформе через пространственную замкнутую кинематическую цепь дополнительную рабочую платформу с закрепленным за ней рабочим органом, где обе упомянутые кинематические цепи содержат цилиндрические шарниры, состоящие из вращательных кинематических пар с параллельно расположенными осями углового поворота соединяемых рычажных звеньев.
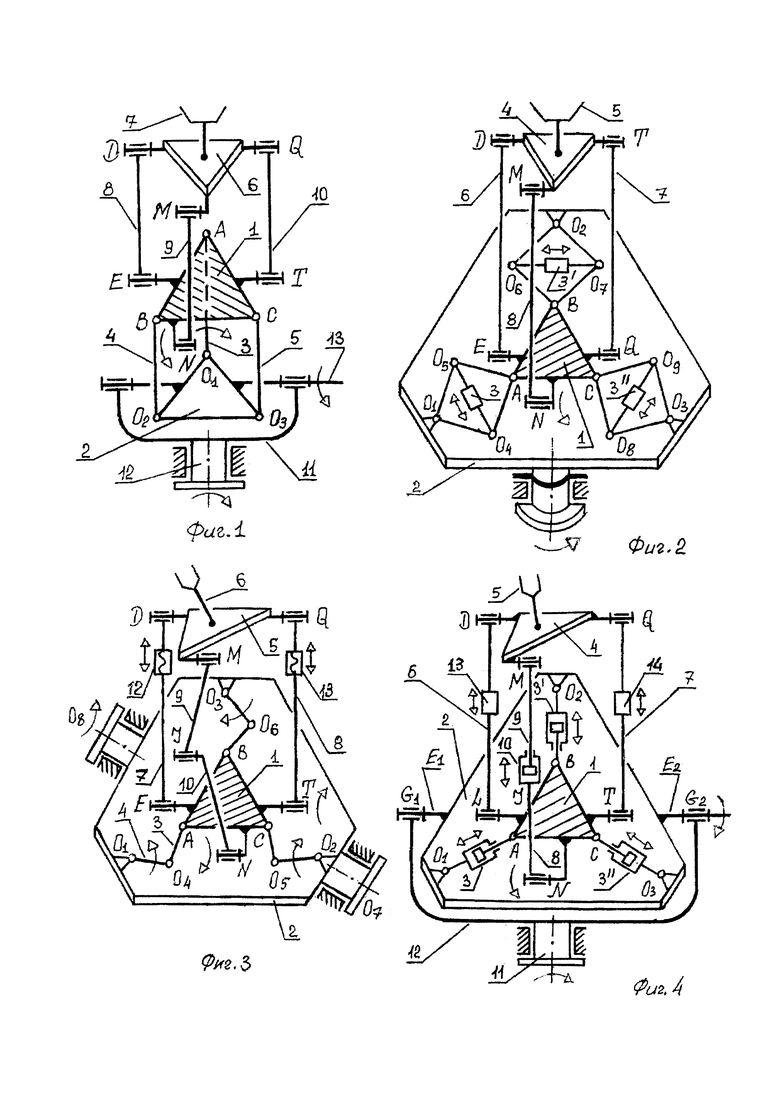
Сущность изобретения поясняется чертежами на фиг. 1, фиг. 2, фиг. 3 и фиг. 4.
На фиг. 1 изображен общий вид предлагаемого плоско-пространственного трехплатформенного манипулятора, в котором кинематическая связь между подвижной платформой 1 и поворотной платформой 2 выполнена в виде трех параллельно установленных между собой кривошипов 3, 4 и 5 одинаковой длины О1А = О2В = О3С. один из которых, например, кривошип 3 снабжен приводной вращательной кинематической парой О1, выполненной с вертикальной осью вращения и образует плоскую замкнутую кинематическую цепь.
Подвижная платформа 1 установлена в одной плоскости или в параллельных плоскостях, а также в одной угловой фазе расположения шарниров - относительно поворотной платформы 2.
Кинематическая связь рабочей платформы 6 и рабочего органа 7 с подвижной платформой 1 выполнена в виде трех установленных параллельно между собой кривошипов 8, 9 и 10 одинаковой NM = ED = TQ и образующих пространственную замкнутую многозвенную кинематическую цепь. Поворотная платформа 2 шарнирно соединена со стержневой рамкой 11, последняя выполнена с перпендикулярно расположенными между собой и сблокированными с упомянутой стержневой рамкой 11 вертикальной и горизонтальной осями ее вращения 12 и 13.
Подвижная платформа 1 и поворотная платформа 2 установлены в одной угловой фазе расположения их шарнирных треугольников ABC и О1О2О3 между собой, а рабочая платформа 6 и подвижная платформа 1 установлены в противофазе с разворотом на 180°.
Представленный на фиг. 1 платформенный манипулятор обладает четырьмя управляемыми степенями свободы (W = 4) - четырьмя ориентирующими движениями рабочей платформы 6 (направления движения входных звеньев манипулятора указаны на фиг. 1 стрелками).
На фиг. 2 представлен вариант выполнения плоско-пространственного трехплатформенного манипулятора, в котором шарнирно-рычажное устройство привода рабочего органа выполнено в виде сборки подвижной платформы 1 с поворотной платформой 2 через плоскую замкнутую кинематическую цепь, включающую три плоских шарнирных ромба О1О4АО5, О2О6ВО7 и О3О8СО9. симметрично расположенных между подвижной платформой 1 и поворотной 2 и присоединенных к вершинам А, В и С платформы 1 с установленными по диагоналям этих ромбов ОАО5, О6О7 и О8О9 приводными пневмоцилиндрами или гидроцилиндрами 3, 3' и 3''. или по диагоналям этих ромбов может быть установлена приводная винтовая кинематическая пара. Рабочая платформа 4 с рабочим органом 5 кинематически связана с подвижной платформой 1 через пространственную замкнутую кинематическую цепь, включающую три параллельных кривошипа 6, 7 и 8 одинаковой длины ED = QT = NM, из которых кривошип 8 снабжен приводной вращательной кинематической парой N. Поворотная платформа 2 выполнена с возможностью осуществления полного поворота вокруг вертикальной оси, а обе упомянутые кинематические цепи содержат цилиндрические шарниры, состоящие из вращательных кинематических пар с параллельно расположенными осями углового поворота звеньев.
Поворотная платформа 2 выполнена с возможностью осуществления полного поворота вокруг вертикальной оси от вращательного двигателя и последующей фиксации, в заданном угловом положении посредством самотормозящейся, например, червячной передачи. Поворотная платформа 2 может быть снабжена устройством ее угловой фиксации, в заданном угловом положении, например, посредством управляемого фрикционного тормоза.
Представленный на фиг. 2 платформенный манипулятор обладает пятью управляемыми степенями свободы (W = 5) - пятью ориентирующими движениями рабочей платформы 4 (направление движения входных звеньев манипулятора на фиг. 2 указано стрелками).
На фиг. 3 представлен вариант выполнения плоско-пространственного трехплатформенного манипулятора, в котором кинематическая связь между подвижной платформой 1 и поворотной платформой 2 выполнена в виде трех пар двухшарнирных соединительных рычагов 3 и 4. снабженных тремя установленными на поворотной платформе 2 приводными вращательными кинематическими парами О1, О2 и О3, а поворотная платформа 2 выполнена с возможностью осуществления полного поворота вокруг оси О7О8, расположенной в плоскости этой платформы 2, с приводом от вращательного двигателя.
Рабочая платформа 5 с рабочим органом 6 кинематически связана с подвижной платформой 1 через два параллельных кривошипа 7 и 8 одинаковой длины ED = TQ (которые снабжены приводными винтовыми механизмами 12 и 13, установленными вдоль упомянутыми двух кривошипов 7 и 8), в также через два подвижно сочленных через цилиндрический шарнир J двухшарнирных соединительных рычага 9 и 10, из которых рычаги 8 и 10 снабжены приводными вращательными кинематическими парами N и Т, которые установлены на платформе 1 и обеспечивают заданную угловую ориентацию платформы 5.
Представленный на фиг. 3 платформенный манипулятор обладает шестью управляемыми степенями свободы (W = 8) - восемью ориентирующими движениями рабочей платформы 5 (направления движения входных звеньев манипулятора на фиг. 3 указаны стрелками).
На фиг. 4 представлен вариант выполнения плоско-пространственного трехплатформенного манипулятора, в котором кинематическая связь между подвижной платформой 1 и поворотной платформой 2 выполнена в виде трех подвижных гидроцилиндров 3, 3' и 3'' в качестве приводных поступательных кинематических пар. Кинематическая связь между подвижной платформой 1 и рабочей платформой 4 с рабочим органом 5 выполнена в виде двух параллельных между собой кривошипов 6 и 7 одинаковой длины LD = TQ, снабженных установленной на подвижной платформе 1 приводной вращательной кинематической парой N, и дополнена двумя соединительными рычагами 8 и 9, связанными между собой через приводную поступательную кинематическую пару J в виде подвижного гидроцилиндра 10 или в виде приводного самотормозящегося винтового механизма. Кривошипы 6 и 8 снабжены сблокированными с ними поступательными приводами 13 и 14, предназначенными для установочного регулирования длины этих кривошипов.
Манипулятор снабжен цилиндрической стержневой опорой 11, выполненной с возможностью осуществления полного поворота вокруг вертикальной оси и сблокированной со стержневой рамкой 12, которая содержит две соосно расположенные между собой по горизонтали полуоси Е1 и Е2, закрепленные на поворотной платформе 2 и предназначенные для кинематической связи через цилиндрические шарниры G1 и G2 поворотной платформы 2 с цилиндрической стержневой опорой 11. Поворотная платформа 2 выполнена с возможностью осуществления полного поворота вокруг горизонтальной оси от вращательного двигателя.
Представленный на фиг. 4 платформенный манипулятор обладает девятью степенями свободы (W = 9) - девятью ориентирующими движениями рабочей платформы 4 с закрепленным на ней рабочим органом 5 (направления движения входных звеньев манипулятора на фиг. 4 указаны стрелками).
Работа представленного платформенного манипулятора заключается в следующем.
Заданное отдельное движение входных звеньев манипулятора (указанное стрелками на фиг. 1, фиг. 2, фиг. 3 и фиг. 4) посредством шарнирно-рычажного устройства на основе представленной плоско-пространственной замкнутой кинематической цепи преобразуется в круговое поступательное движение рабочей платформы с рабочим органом, что обеспечивает постоянство ориентирования рабочего органа во всем расширенном (за счет увеличения числа управляемых степеней свободы до W = 9) пространстве управляемой работы манипулятора. Кроме того, данный привод манипулятора обеспечивает установочное регулирование угла наклона рабочей платформы или его гарантированное постоянство или дальнейшем перемещении рабочего органа (в процессе выполнения технологических или хирургических операций).
Достигаемый в предлагаемом платформенном манипуляторе положительный эффект заключается в упрощении конструкции (на основе применения простых вращательных кинематических пар) и системы управления (за счет раздельной кинематики управляемых движений рабочего органа), расширении рабочего пространства и функциональности манипулятора (за счет увеличения до W=9 числа его управляемых степеней свободы), а также гарантированного постоянства ориентации перемещаемого рабочего органа при выполнении различных технологических и хирургических операций (за счет точного кинематического обеспечения кругового поступательного движения рабочего органа с заданным постоянным углом его расположения в пространстве) - что расширяет функциональность и области применения манипулятора.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЛОСКО-ПРОСТРАНСТВЕННЫЙ ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР С ИЗБЫТОЧНЫМ ПРИВОДОМ | 2021 |
|
RU2782460C1 |
| ПРОСТРАНСТВЕННО-ПЛОСКИЙ ПЛАТФОРМЕННЫЙ СФЕРИЧЕСКИЙ МАНИПУЛЯТОР | 2021 |
|
RU2781602C1 |
| ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР | 2020 |
|
RU2758607C1 |
| СИММЕТРИЧНЫЙ ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР С ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ | 2021 |
|
RU2776578C1 |
| ПРОСТРАНСТВЕННЫЙ ПАРАЛЛЕЛОГРАММНЫЙ МЕХАНИЗМ МАНИПУЛЯТОРА | 2022 |
|
RU2784764C1 |
| ПАРАЛЛЕЛЬНЫЙ МАНИПУЛЯТОР С ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ | 2020 |
|
RU2753217C1 |
| ПЛАТФОРМЕННЫЙ МЕХАНИЗМ ОТНОСИТЕЛЬНОГО МАНИПУЛИРОВАНИЯ | 2021 |
|
RU2758391C1 |
| МЕХАНИЗМ ПЛАВАЮЩЕГО ШАРНИРНОГО ПАРАЛЛЕЛОГРАММА | 2021 |
|
RU2765387C1 |
| СКЛАДЫВАЮЩИЙСЯ ШАРНИРНЫЙ МАНИПУЛЯТОР | 2021 |
|
RU2765030C1 |
| ШАРНИРНЫЙ МЕХАНИЗМ | 2021 |
|
RU2753064C1 |
Изобретение относится к машиностроению, в частности к платформенным механизмам параллельной структуры с несколькими степенями свободы, и может найти применение в разных областях техники и хирургии в качестве стационарных, переносных и подвесных устройств с заданной постоянной ориентацией перемещаемого рабочего органа во всем расширенном рабочем пространстве. Плоско-пространственный трехплатформенный манипулятор содержит шарнирно-рычажное устройство привода рабочего органа, которое выполнено в виде сборки из трех кинематически связанных между собой трехшарнирных звеньев, выполненных в виде последовательно расположенных по вертикали поворотной платформы, образующей с подвижной платформой плоскую замкнутую кинематическую цепь, и присоединяемой к подвижной платформе через пространственную замкнутую кинематическую цепь рабочей платформы с закрепленным на ней рабочим органом, где обе упомянутые кинематические цепи содержат цилиндрические шарниры, состоящие из вращательных кинематических пар с параллельно расположенными между собой осями углового поворота соединяемых звеньев. Технический результат заключается в упрощении конструкции и системы управления, расширении рабочего пространства и увеличении до девяти числа управляемых степеней свободы, а также в обеспечении постоянства заданной ориентации рабочего органа при его круговом поступательном перемещении. 9 з.п. ф-лы, 4 ил.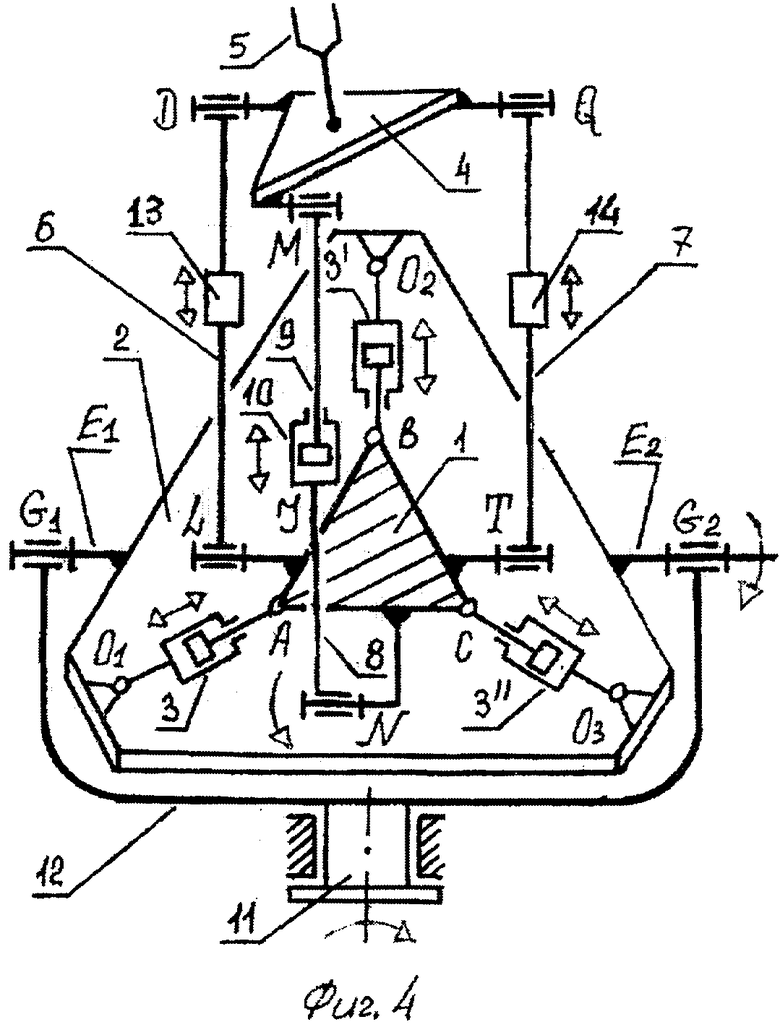
1. Плоско-пространственный трехплатформенный манипулятор, содержащий шарнирно-рычажное устройство привода рабочего органа, отличающийся тем, что шарнирно-рычажное устройство выполнено в виде сборки из трех кинематически связанных между собой трехшарнирных звеньев, последовательно расположенных по вертикали и выполненных в виде равносторонних треугольников, первый из которых представляет поворотную платформу, второй из которых представляет подвижную платформу, установленную в одной плоскости или в параллельных плоскостях, а также в одной угловой фазе расположения шарниров относительно упомянутой поворотной платформы, третий трехшарнирный треугольник представляет рабочую платформу с закрепленным на ней рабочим органом, которая установлена в противофазе с разворотом на 180 градусов относительно упомянутой подвижной платформы, при этом поворотная платформа и подвижная платформа вместе с соединяющими их рычажными звеньями образуют плоскую замкнутую кинематическую цепь, подвижная платформа и рабочая платформа вместе с соединяющими их рычажными звеньями образуют пространственную замкнутую кинематическую цепь, а обе упомянутые кинематические цепи содержат цилиндрические шарниры, состоящие из вращательных кинематических пар с параллельно расположенными осями углового поворота соединяемых рычажных звеньев.
2. Манипулятор по п. 1, отличающийся тем, что поворотная платформа выполнена с возможностью осуществления полного поворота вокруг вертикальной оси от вращательного двигателя и последующей фиксации в заданном угловом положении посредством самотормозящейся, например червячной, передачи.
3. Манипулятор по п. 1, отличающийся тем, что поворотная платформа выполнена с возможностью осуществления полного поворота от вращательного двигателя вокруг оси, расположенной в плоскости упомянутой поворотной платформы, которая снабжена устройством ее угловой фиксации в заданном угловом положении, например, посредством управляемого фрикционного тормоза.
4. Манипулятор по п. 1, отличающийся тем, что кинематическая связь между подвижной платформой и поворотной платформой выполнена в виде симметрично расположенных между ними трех шарнирных ромбов, каждый из которых снабжен приводной поступательной кинематической парой, выполненной в виде подвижного пневмоцилиндра или гидроцилиндра и установленной по диагонали упомянутых ромбов.
5. Манипулятор по п. 1, отличающийся тем, что кинематическая связь между подвижной платформой и поворотной платформой выполнена в виде симметрично расположенных между ними трех шарнирных ромбов, каждый из который снабжен приводной винтовой кинематической парой, расположенной по диагонали упомянутых ромбов, а поворотная платформа выполнена с возможностью осуществления поступательного движения вдоль вертикальной оси от приводного линейного двигателя, выполненного в виде приводного пневмоцилиндра или винтового одноподвижного механизма.
6. Манипулятор по п. 1, отличающийся тем, что кинематическая связь между подвижной платформой и поворотной платформой выполнена в виде трех одинаковых стержневых опор, каждая из которых составлена из двух двухшарнирных соединительных рычагов, один из которых снабжен установленной на поворотной платформе приводной вращательной кинематической парой.
7. Манипулятор по п. 1, отличающийся тем, что кинематическая связь между подвижной платформой и поворотной платформой выполнена в виде трех подвижных стержневых опор, каждая из которых составлена из двух соединительных рычагов и снабжена установленной между ними приводной поступательной кинематической парой, выполненной в виде установленного на поворотной платформе подвижного пневмоцилиндра или гидроцилиндра.
8. Манипулятор по п. 1, отличающийся тем, что кинематическая связь между рабочей платформой с закрепленным на ней рабочим органом и подвижной платформой выполнена в виде трех параллельно установленных между собой кривошипов одинаковой длины, один из которых снабжен установленной на подвижной платформе приводной вращательной кинематической парой.
9. Манипулятор по п. 1, отличающийся тем, что кинематическая связь между рабочей платформой с закрепленным на ней рабочим органом и подвижной платформой выполнена в виде трех подвижных стержневых опор, две из которых выполнены в виде двух параллельных между собой кривошипов одинаковой длины, которые снабжены приводными винтовыми механизмами, установленными вдоль упомянутых двух кривошипов, а третья подвижная стержневая опора составлена из двух двухшарнирных соединительных рычагов, один из которых снабжен установленной на подвижной платформе приводной вращательной кинематической парой.
10. Манипулятор по п. 1, отличающийся тем, что он снабжен цилиндрической стержневой опорой, выполненной с возможностью осуществления полного поворота вокруг вертикальной оси от вращательного двигателя и сблокированной со стержневой рамкой, которая содержит две соосно расположенные между собой по горизонтали полуоси Е1 и Е2, закрепленные на поворотной платформе и предназначенные для кинематической связи через цилиндрические шарниры этой поворотной платформы с упомянутой цилиндрической стержневой опорой, поворотная платформа выполнена с возможностью осуществления полного поворота вокруг горизонтальной оси от вращательного двигателя, кинематическая связь между рабочей платформой с закрепленным на ней рабочим органом и подвижной платформой выполнена в виде трех параллельных между собой кривошипов одинаковой длины, которые снабжены сблокированными с ними поступательными приводами для установочного регулирования длины этих кривошипов, а третья подвижная стержневая опора составлена из двух соединительных рычагов, связанных между собой через приводную поступательную или винтовую кинематическую пару, выполненную в виде подвижного пневмоцилиндра или приводного самотормозящегося винтового механизма, для образования платформенного манипулятора с девятью управляемыми степенями свободы перемещения рабочего органа.
| ПРОСТРАНСТВЕННЫЙ ПЛАТФОРМЕННЫЙ VIP-МАНИПУЛЯТОР | 2019 |
|
RU2722165C1 |
| СПОСОБ ПОЛУЧЕНИЯ ДДТ | 0 |
|
SU170930A1 |
| СФЕРИЧЕСКИЙ V-МАНИПУЛЯТОР | 2020 |
|
RU2730345C1 |
| US 6729202 B2, 04.05.2004 | |||
| УСТРОЙСТВО ДЛЯ ПОЗИЦИОНИРОВАНИЯ ИСПОЛНИТЕЛЬНОГО ОРГАНА | 2015 |
|
RU2605059C1 |

