Изобретение относится в области машиностроения и может найти применение в качестве механизмов роботов и манипуляторов, летучих ножниц, многоконтурных каркасов крыш, антенн рефлекторов и локаторов.
Известно механическое устройство каркаса крупногабаритной антенны в виде многослойной цепи из пересекающихся ребер - для образования рефлектора с эллиптической линией раскрыва (журнал «Известия ВУЗов. Машиностроение. №9 (726), 2020 г., с. 56, рис. 1) - аналог №1.
Недостатками известного устройства являются большие габариты и вес, а также сложность изготовления и сборки.
Известен шарнирный механизм антенны рефлектора, содержащий замкнутую кинематическую цепь с применением в ней трех приводных двигателей и двух сложных сферических шарниров (книга А.Ф. Крайнев «Механика машин. Фундаментальный словарь» - Москва: Машиностроение, 2000. - с. 35, схема) - аналог №2.
Недостатками известного шарнирного механизма являются сложность конструкции и сборка, а также большие габариты и вес.
Наиболее близким по технической сущности и достигаемому эффекту является многоконтурный шарнирный механизм, замкнутая кинематическая цепь которого составлена из отдельных рычажных звеньев, собираемых друг с другом через шарниры с взаимно-перпендикулярными осями вращения (Patent CN 112550762 В от 02.12.2002., фиг. 3) - прототип.
Недостатками указанного шарнирного механизма являются:
1) Сложность конструкции, большие пространственные габариты и вес.
2) Невозможность складывания всех звеньев кинематической цепи только в. одной плоскости для образования компактной конструкции при ее транспортировке, что ограничивает области применения.
3) Сложность изготовления и сборки всей конструкции механизма, состоящего из большого количества рычажных звеньев со взаимно-перпендикулярными осями шарниров точно под углом β=90°.
В основу изобретения положена техническая задача упрощения конструкции, изготовления и сборки многоконтурных шарнирных механизмов; обеспечения их складываемости только в одной компактной плоскости и расширения их функциональности.
Получение технического результата достигается за счет того, что паутинный шарнирный механизм содержит замкнутую кинематическую цепь, выполненную в. виде расширяющейся от центра к периферии многоконтурной кольцевой структуры, составленной из концентрично установленных один вокруг другого шарнирных многозвенников, которые попарно соединены между собой рычажными звеньями через цилиндрические шарниры с одноподвижными вращательными кинематическими парами.
Сущность изобретения поясняется чертежами на фиг. 1, фиг. 2, фиг. 3, фиг. 4, фиг. 5, фиг. 6 и фиг. 7.
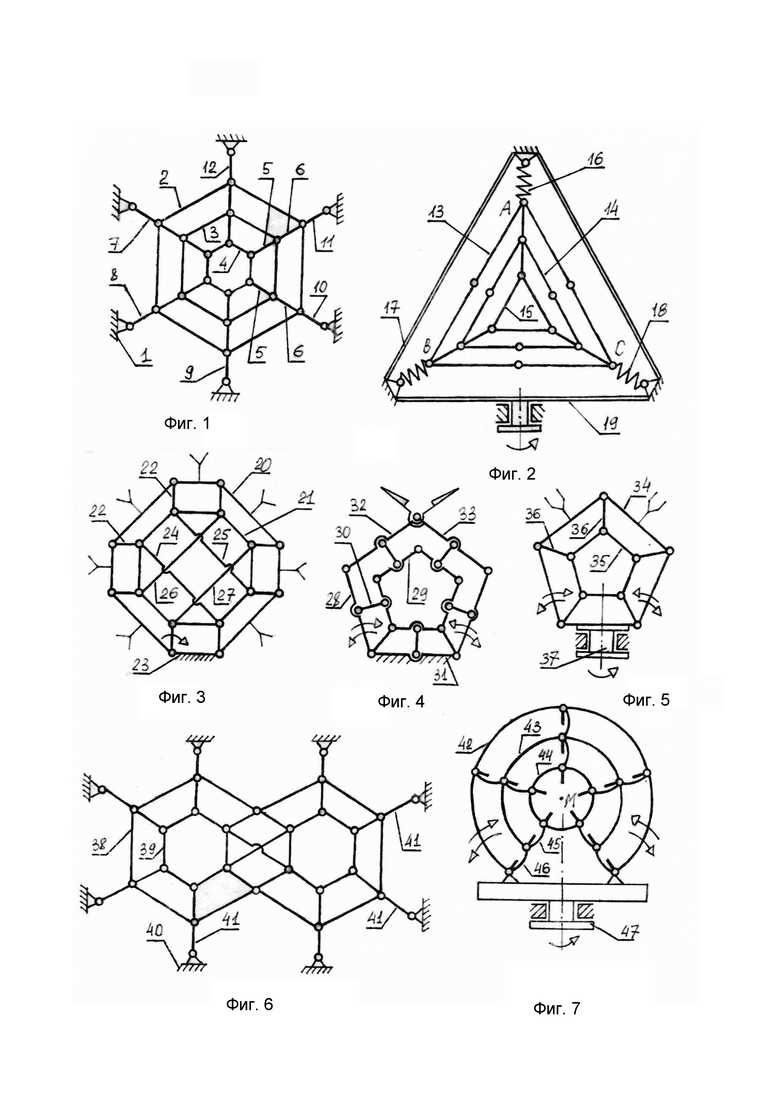
На фиг. 1 изображен общий вид паутинного шарнирного механизма, содержащего стойку 1 и замкнутую кинематическую цепь, которая выполнена в виде расширяющейся от центра к периферии многоконтурной кольцевой структуры и составлена из концентрично установленных один вокруг другого шарнирных шестизвенников 2, 3 и 4, вершины которых соединены между собой посредством радиально установленных двухшарнирных соединительных звеньев 5 и 6 с одноподвижными вращательными парами.
Все вершины наружного шарнирного шестизвенника 2 соединены со стойкой 1 посредством опорных двухшарнирных звеньев 7, 8, 9, 10, 11 и 12 через цилиндрические шарниры с параллельными осями вращения, для образования складывающейся без стойки плоской антенны рефлектора с круговой линией раскрыва.
На фиг. 2 представлен вариант выполнения паутинного шарнирного механизма, в котором замкнутая кинематическая цепь составлена из концентрично установленных один вокруг другого наружного и внутреннего шарнирных шестизвенников 13, 14 и центрального шарнирного шестизвенника 15. При этом три вершины А, В и С наружного шарнирного шестизвенника 13 равномерно по окружности соединены со стойкой через упругие элементы 16, 17 и 18, например, в виде пружин растяжения или пружин сжатия или торсионных валов, для образования складывающейся антенны радиолокатора с треугольной линией раскрыва.
На фиг. 3 представлен вариант выполнения паутинного шарнирного механизма, в котором замкнутая кинематическая цепь составлена из концетрично установленных один вокруг другого наружного и внутреннего шарнирных восьмизвенников 20 и 21, вершины которых попарно соединены между собой посредством двухшарнирных соединительных звеньев 22. При этом одна из сторон наружного шарнирного восьмизвенника 20 сблокирована со стойкой 23, а противоположные вершины внутреннего шарнирного восьмизвеннника 21 попарно связаны между собой четырьмя соединительными двухшарнирными звеньями 24, 25, 26 и 27, для образования паутинного параллелограммного механизма многорукого робота с одной управляемой степенью свободы. Все подвижные стороны наружного шарнирного восьмизвенника 20 выполнены с возможностью установки на них отдельных рабочих органов.
На фиг. 4 представлен вариант выполнения паутинного шарнирного механизма, в котором замкнутая кинематическая цепь составлен из концентрично установленных один вокруг другого наружного и внутреннего шарнирных пятизвенников 28 и 29, противолежащие стороны которых попарно соединены между собой посредством соединительных двухшарнирных звеньев 30. При этом одна из сторон наружного шарнирного пятизвенника 28 сблокирована со стойкой 31, а две другие смежные стороны 32 и 33 наружного шарнирного пятизвенника 28 выполнены с возможностью установки на них режущих рабочих органов, например, для образования механизма летучих ножниц.
На фиг. 5 представлен вариант выполнения паутинного шарнирного механизма, в котором замкнутая кинематическая цепь составлена из концентрично установленных один вокруг другого наружного и внутреннего шарнирных пятизвенников 34 и 35, вершины которых попарно соединены посредством соединительных двухшарнирных звеньев 36. При этом одна из сторон наружного шарнирного пятизвенника 34 сблокирована с поворотной платформой 37 для образования поворотного плоского манипулятора с двумя управляемыми степенями свободы.
На фиг. 6 представлен вариант выполнения паутинного шарнирного механизма, в котором замкнутая кинематическая цепь составлена из концентрично установленных один вокруг другого наружного и внутреннего шарнирных шестизвенников 38 и 39, образующих между собой сотовую многоконтурную конструкцию складывающегося без стойки каркаса, например, крыши, в которой вершины наружных шарнирных шестизвенников 38 соединены со стойкой 40 посредством опорных двухшарнирных звеньев 41, расположенных по периферии упомянутой сотовой конструкции.
На фиг. 7 представлен вариант выполнения паутинного шарнирного механизма, в котором оси всех цилиндрических шарниров цепи выполнены пересекающимися между собой в одной общей точке М, а все рычажные звенья замкнутой кинематической цепи кольцевой структуры выполнены в виде радиально изогнутых пластин 42, 43, 44, 45, 46 и установлены на поворотную платформу 47 для образования пространственной складывающейся сферической антенны с круговой линией раскрыва.
Работа представленного в разных вариантах выполнения (на фиг. 1, фиг. 2, фиг. 3, фиг. 4, фиг. 5, фиг. 6 и фиг. 7) паутинного шарнирного механизма заключается в следующем.
Вращение входных звеньев (в направлении указанных круговых стрелок) приводит к складыванию или раскладыванию многоконтурной кольцевой структуры замкнутой кинематической цепи составной шарнирной конструкции в виде набора концентричных многозвенников, а также к образованию: плоских и пространственных антенн с круговой и треугольной линией раскрыва, компактных шарнирно-рычажных передач привода, например, летучих ножниц, роботов и манипуляторов.
Достигаемый технический эффект заключается в упрощении конструкции многозвенных шарнирно-рычажных устройств, снижении трудоемкости их изготовления и сборки (за счет выполнения их кольцевой структуры из концентричных шарнирных многозвенников), а также компактности антенн рефлекторов, каркасных конструкций и робототехники в нерабочем положении.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШАРНИРНЫЙ МЕХАНИЗМ | 2021 |
|
RU2753064C1 |
| ПЛАТФОРМЕННЫЙ МЕХАНИЗМ ОТНОСИТЕЛЬНОГО МАНИПУЛИРОВАНИЯ | 2021 |
|
RU2758391C1 |
| СКЛАДЫВАЮЩИЙСЯ СИММЕТРИЧНЫЙ МЕХАНИЗМ МАНИПУЛЯТОРА | 2023 |
|
RU2821637C1 |
| СИММЕТРИЧНЫЙ ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР С ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ | 2021 |
|
RU2776578C1 |
| МНОГОКОНТУРНЫЙ ШАРНИРНЫЙ МЕХАНИЗМ | 2020 |
|
RU2751777C1 |
| СКЛАДЫВАЮЩИЙСЯ МНОГОКРАТНЫЙ ПАРАЛЛЕЛОГРАММНЫЙ МЕХАНИЗМ | 2023 |
|
RU2810882C1 |
| МЕХАНИЗМ ПЛАВАЮЩЕГО ШАРНИРНОГО ПАРАЛЛЕЛОГРАММА | 2021 |
|
RU2765387C1 |
| ПРОСТРАНСТВЕННЫЙ МАНИПУЛЯТОР | 2021 |
|
RU2758377C1 |
| ПАРАЛЛЕЛОГРАММНЫЙ ПРЯМОЛИНЕЙНО-НАПРАВЛЯЮЩИЙ МЕХАНИЗМ | 2021 |
|
RU2769002C1 |
| КРУГОВОЙ ПРОСТРАНСТВЕННЫЙ СФЕРИЧЕСКИЙ МАНИПУЛЯТОР | 2021 |
|
RU2758385C1 |
Изобретение относится к области машиностроения и служит в качестве механизмов роботов и манипуляторов, летучих ножниц, многоконтурных каркасов крыш, антенн рефлекторов и локаторов. Технический результат - упрощение конструкции многозвенных шарнирно-рычажных устройств, снижение трудоемкости их изготовления и сборки, а также компактность в нерабочем положении. Результат достигается тем, что предложен паутинный шарнирный механизм, который содержит замкнутую кинематическую цепь из шарнирно-сочлененных между собой звеньев, которая выполнена в виде расширяющейся от центра к периферии многоконтурной кольцевой структуры, составленной из концентрически установленных один вокруг другого шарнирных многозвенников, которые попарно соединены между собой посредством рычажных звеньев и цилиндрических шарниров, радиально установленных между упомянутыми многозвенниками. 7 з.п. ф-лы, 7 ил.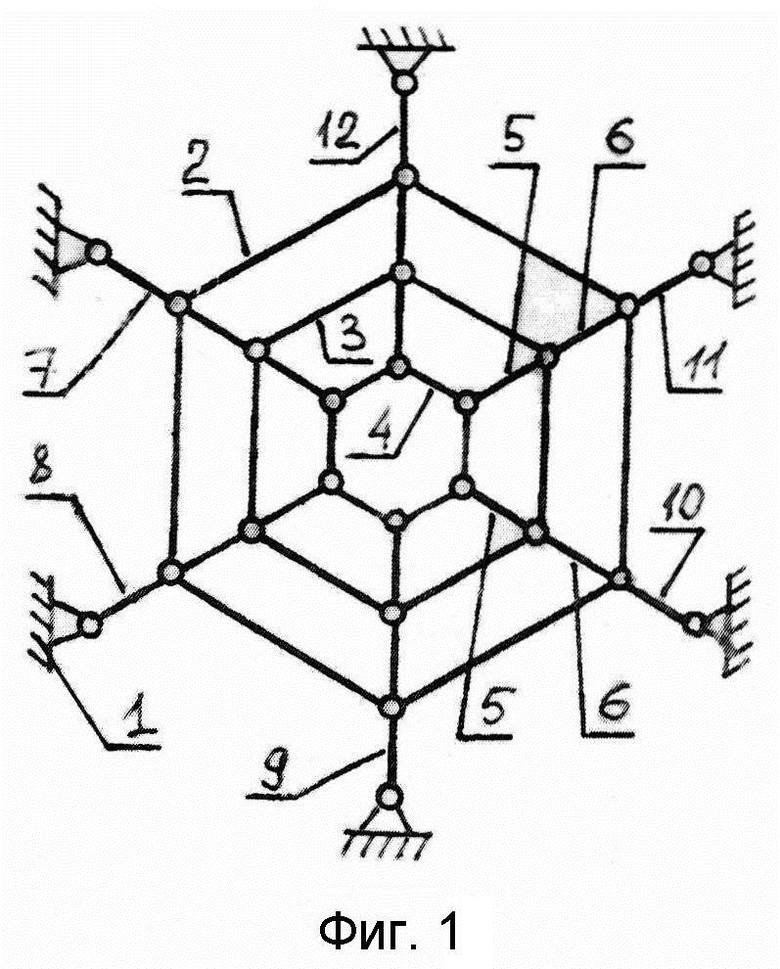
1. Паутинный шарнирный механизм, преимущественно, антенны рефлектора или локатора, содержащий стойку и замкнутую кинематическую цепь из шарнирно-сочлененных между собой звеньев, отличающийся тем, что замкнутая кинематическая цепь выполнена в виде расширяющейся от центра к периферии многоконтурной кольцевой структуры, составленной из концентрично установленных один вокруг другого шарнирных многозвенников, которые попарно соединены между собой посредством рычажных звеньев, радиально установленных между упомянутыми многозвенниками и образующих с ними цилиндрические шарниры с одноподвижными вращательными кинематическими парами, при этом оси всех шарниров выполнены с параллельными между собой или с пересекающимися в одной общей точке осями вращения.
2. Паутинный шарнирный механизм по п. 1, отличающийся тем, что замкнутая кинематическая цепь составлена из концентрично установленных один вокруг другого шарнирных шестизвеников, вершины которых соединены между собой посредством двухшарнирных соединительных звеньев, а все вершины наружного шарнирного шестизвенника соединены со стойкой посредством опорных двухшарнирных звеньев для образования складывающейся плоской антенны рефлектора с круговой линией раскрыва.
3. Паутинный шарнирный механизм по п. 1, отличающийся тем, что замкнутая кинематическая цепь составлена из концентрично установленных один вокруг другого шарнирных шестизвенников и центрального шарнирного трехзвенника, при этом три вершины наружного шарнирного шестизвенника равномерно по окружности соединены со стойкой через упругие элементы, например, в виде пружин растяжения или пружин сжатия или торсионных валов, а стойка выполнена в виде поворотной треугольной рамки для образования складывающейся антенны радиолокатора с треугольной линией раскрыва.
4. Паутинный шарнирный механизм по п. 1, отличающийся тем, что замкнутая кинематическая цепь составлена из концентрично установленных один вокруг другого наружного и внутреннего шарнирных восьмизвенников, вершины которых попарно соединены между собой посредством двухшарнирных соединительных звеньев, при этом одна из сторон наружного шарнирного восьмизвенника сблокирована со стойкой, а противоположные вершины внутреннего шарнирного восьмизвенника попарно связаны между собой четырьмя соединительными двухшарнирными звеньями для образования паутинного параллелограммного механизма многорукого робота с одной управляемой степенью свободы.
5. Паутинный шарнирный механизм по п. 1, отличающийся тем, что замкнутая кинематическая цепь составлена из концетрично установленных один вокруг другого наружного и внутреннего шарнирных пятизвенников, противолежащие стороны которых попарно соединены между собой посредством соединительных двухшарнирных звеньев, при этом одна из сторон наружного шарнирного пятизвенника сблокирована со стойкой, а две другие смежные стороны наружного пятизвенника выполнены с возможностью установки на них режущих рабочих органов, например для образования механизма летучих ножниц.
6. Паутинный шарнирный механизм по п. 1, отличающийся тем, что замкнутая кинематическая цепь составлена из концентрично установленных один вокруг другого наружного и внутреннего шарнирных пятизвенников, вершины которых попарно соединены между собой посредством соединительных двухшарнирных звеньев, при этом одна из сторон наружного шарнирного пятизвенника сблокирована с поворотной платформой для образования поворотного плоского манипулятора с двумя управляемыми степенями свободы.
7. Паутинный шарнирный механизм по п. 1, отличающийся тем, что замкнутая кинематическая цепь составлена из концентрично установленных один вокруг другого наружного и внутреннего шарнирных шестизвенников, образующих между собой сотовую многоконтурную конструкцию складывающегося каркаса, например крыши, в которой вершины наружных шестизвенников соединены со стойкой посредством опорных двухшарнирных звеньев.
8. Паутинный шарнирный механизм по п. 1, отличающийся тем, что оси всех цилиндрических шарниров выполнены пересекающимися между собой в одной общей точке, а все рычажные звенья выполнены в виде радиально изогнутых плоских пластин и установлены на поворотную платформу для образования пространственной складывающейся сферической антенны с круговой линией раскрыва.
| CN 112550762 A, 26.03.2021 | |||
| RU 2777123 C1, 01.08.2022 | |||
| CN 111641020 A, 08.09.2020 | |||
| CN 107331939 B, 04.09.2018 | |||
| US 10407896 B2, 10.09.2019 | |||
| CN 108847518 B, 06.09.2019. |

