Предлагаемое изобретение относится к области машиностроения, а именно к технике создания землеройных машин.
В настоящее время известны траншейные экскаваторы с разными рабочими органами. Широкое применения при выполнении строительных работ нашли, в частности, траншейные экскаваторы, в которых рабочим органом служит замкнутая цепь, перемещаемая приводом, на которой установлены ковши (URL: www.baurum.ru/_library/?cat=earthworks_machines
&id=1208. Цепные траншейные экскаваторы / Справочник строителя (дата обращения 07.09.2020 г.)). Экскаваторы с подобными рабочими органами позволяют разрабатывать траншеи для укладки кабелей и трубопроводов малых диаметров глубиной до 1,6 м и шириной 0,2…0,4 м при строительстве жилых зданий и т.п. Продольное копание протяженных траншей под магистральные трубопроводы и большие промышленные объекты глубиной до 3 и более метров и шириной до 1…1,5 метров цепные рабочие органы выполнять не позволяют из-за недостаточной прочности и надежности.
Более надежными и прочными из траншейных экскаваторов являются такие, в которых рабочим органом служит ротор, выполненный в виде колеса диаметром D с приводом вращения, и n ковшей, размещенных вокруг колеса и соединенных с ним. Такой рабочий орган траншейного экскаватора, описанный, например, в книге «Б.Н. Абрамов, О.А. Лукашук. Многоковшовые экскаваторы: проектирование и расчет. – Екатеринбург: УрФУ. 2012», принят нами за прототип предлагаемого.
Особенностью прототипа является то, что все ковши размещены на колесе на одинаковых расстояниях R от его центра и с одинаковым угловым шагом α. Это обеспечивает простоту конструкции ротора и ее более высокие эксплуатационные качества (например, более высокую жесткость), чем цепи с ковшами.
Вместе с тем, недостатком рабочих органов траншейных экскаваторов, состоящих из роторов, выполненных в виде колеса с приводом вращения, является необходимость применения привода значительной мощности: 100 и более кВт.
Проблемой, решаемой предлагаемым изобретением, в соответствии с этим, является снижение мощности привода ротора и создание рабочего органа экскаватора, обеспечивающего это.
В процессе работы экскаватора приводу его ротора приходится преодолевать значительные силы сопротивления, из которых главная – сила сопротивления грунта копанию P. Указанная сила, как известно из классической литературы по землеройным машинам (см., например, книгу «Д.И. Федоров. Рабочие органы землеройных машин. – М.: Машиностроение. 1990, стр. 7), может быть определена по формуле Н.Г. Домбровского
P=Kbh,
где K – удельное сопротивление грунта копанию, b и h соответственно ширина и толщина срезаемого ковшами пласта грунта. Уменьшив h или разделив его между ковшами, величину P можно снизить. Однако просто уменьшая h, приходится уменьшать и производительность экскаватора. Деление же h между ковшами снижения производительности за собой может не повлечь.
Учитывая изложенное, проблема, сформулированная выше, технически решается за счет того, что рабочий орган траншейного экскаватора, состоящий из ротора, выполненного в виде колеса диаметром D с приводом вращения, и n ковшей, размещенных вокруг колеса и соединенных с ним, отличается от прототипа тем, что ковши расположены относительно центра ротора и друг друга в соответствии с соотношениями
R_0=D/2+H; α_0=2π/n; α_j=R_(i-1)/R_i α_(j-1); R_i>R_(i-1),
где H – минимально допустимая высота ковша, i – порядковый номер ковша с [R_i>R]_0, равный 1, 2, …, n-1, j – порядковый номер углового шага между ковшами [α_J>α]_0, равный 1, 2, …, n-2, отсчитываемые против направления вращения ротора, R_0 – расстояние режущих кромок ковша минимальной высоты от центра ротора, α_0 – угловой шаг между ковшом с номером 1 и ковшом, предшествующим ему, R_i – расстояние режущих кромок i-го ковша от центра ротора, α_j – угловой шаг между i -ым и (i-1)-ым ковшами.
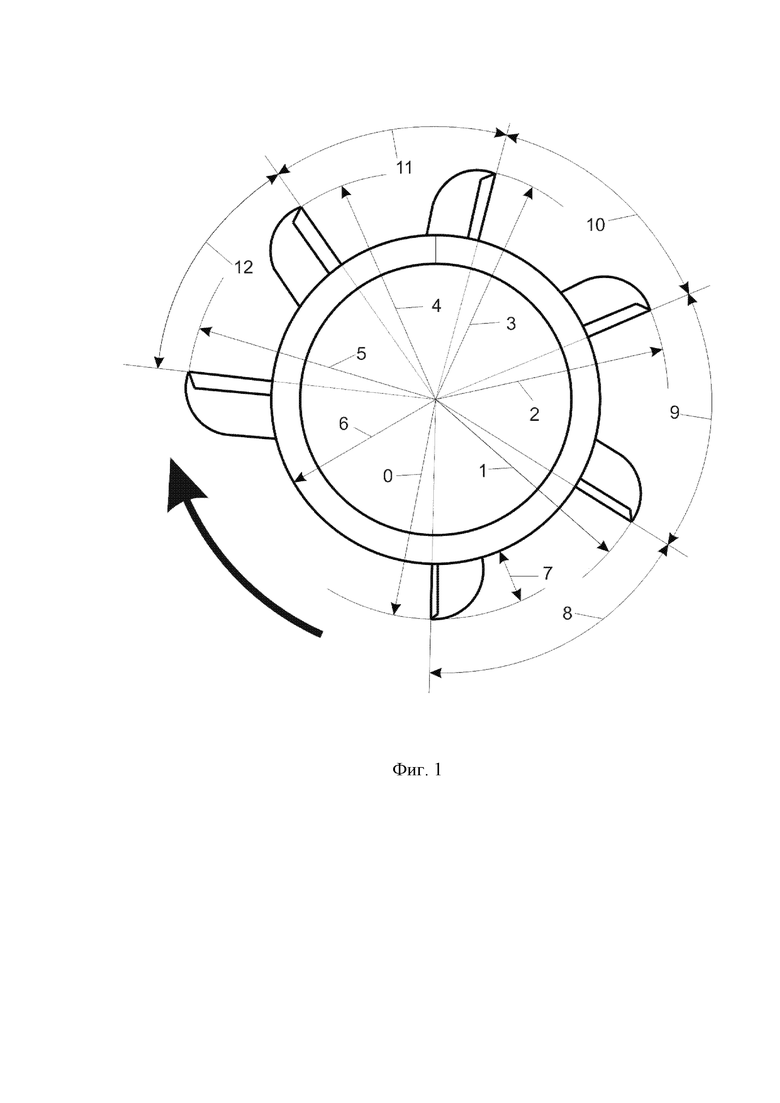
Схема предлагаемого рабочего органа траншейного экскаватора приведена на фиг. 1, где в качестве примера изображено его колесо с n=6 ковшами (привод колеса условно не показан).
Цифрами 0, 1, 2, 3, 4, 5 на фиг. 1 обозначены расстояния R_0, R_1, R_2, R_3, R_4, R_5 режущих кромок ковшей от центра ротора, цифрами 6 и 7, соответственно, величины D/2 и H, цифрами 8, 9, 10, 11 и 12 угловые шаги α_0, α_1, α_2, α_3, α_4 между ковшами. При изображении принято: D=100%; H≈25% от D/2; расстояние R_i последовательно увеличиваются на 3 % от R_0. Угловые шаги между ковшами таковы α_0=100%, α_1=97% от α_0, α_2=94,3% от α_0, , α_3=91,7% от α_0, α_4=89,3% от α_0. Широкой стрелкой на фиг. 1 показано направление вращения ротора при эксплуатации экскаватора.
В процессе эксплуатации предлагаемого рабочего органа пласт грунта, срезаемого ковшом, складывается из двух составляющих: определяемых вращением ротора и движением подачи экскаватора вдоль траншеи. Второе осуществляется с помощью тягача, не входящего в состав траншейного экскаватора, поэтому мощность привода вращения ротора экскаватора расходуется, главным образом, на первое – на срезание первой составляющей пласта. Чем меньше толщина этого пласта, тем меньше затрачиваемая мощность. В случае предлагаемого рабочего органа, показанного как пример на фиг. 1, пласт грунта, подлежащий срезанию, имеющий некоторую толщину L, делится между n=6 ковшами на слои одинаковой толщины и длины. Если у прототипа сила сопротивления грунта копанию, действующая на каждый ковш при вращении ротора, была равна P=KbL, то у ротора, приведенного на фиг. 1, она равна P=1/6 KbL. Поскольку толщины и длины срезаемых слоев грунта при этом остаются одинаковыми, объемы слоев, срезаемых ковшами при работе ротора, тоже одинаковы. Это в процессе эксплуатации ротора не нарушает его первоначальную балансировку. (Такая балансировка при изготовлении как прототипа, так и предлагаемого рабочего органа экскаватора обязательна!) Разумеется при работе траншейного экскаватора с предложенным рабочим органом может возникнуть необходимость увеличения подачи (скорости V его движения вдоль траншеи), но существенного увеличения потребляемой мощности тягача, осуществляющего подачу, это за собой не повлечет, т.к. зависимость PV=const при снижении Р допускает пропорциональное увеличение V.
В связи с изложенным, техническим результатом предлагаемого изобретения является снижение мощности, потребляемой приводом рабочего органа траншейного роторного экскаватора, что является следствием разрешения сформулированной выше проблемы.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАБОЧИЙ ОРГАН РОТОРНОГО ТРАНШЕЙНОГО ЭКСКАВАТОРА | 2010 |
|
RU2421575C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ШНЕКОВЫХ ЭЛЕМЕНТОВ | 2009 |
|
RU2516152C9 |
| Роторный экскаватор специального назначения | 2024 |
|
RU2834251C1 |
| РАБОЧИЙ ОРГАН РОТОРНОГО ЭКСКАВАТОРА | 2021 |
|
RU2790420C1 |
| ШНЕКОВЫЕ ЭЛЕМЕНТЫ ДЛЯ ЭКСТРУЗИИ ПЛАСТИЧЕСКИХ МАСС | 2009 |
|
RU2500533C2 |
| Траншейный роторный экскаватор | 2021 |
|
RU2772810C1 |
| РОТОРНЫЙ ТРАНШЕЙНЫЙ ЭКСКАВАТОР | 1972 |
|
SU358479A1 |
| Траншейный экскаватор | 1976 |
|
SU658237A1 |
| Роторный экскаватор для рытья траншей | 1959 |
|
SU131273A1 |
| Рабочий орган роторного экскаватора | 1986 |
|
SU1320337A2 |
Изобретение относится к области машиностроения, а именно к технике создания землеройных машин. Технический результат – снижение мощности, потребляемой приводом рабочего органа траншейного экскаватора. Рабочий орган траншейного экскаватора состоит из ротора, выполненного в виде колеса диаметром D с приводом вращения, и n ковшей, размещенных вокруг колеса и соединенных с ним. При этом ковши расположены относительно центра ротора и друг друга в соответствии с определенными соотношениями. 1 ил. 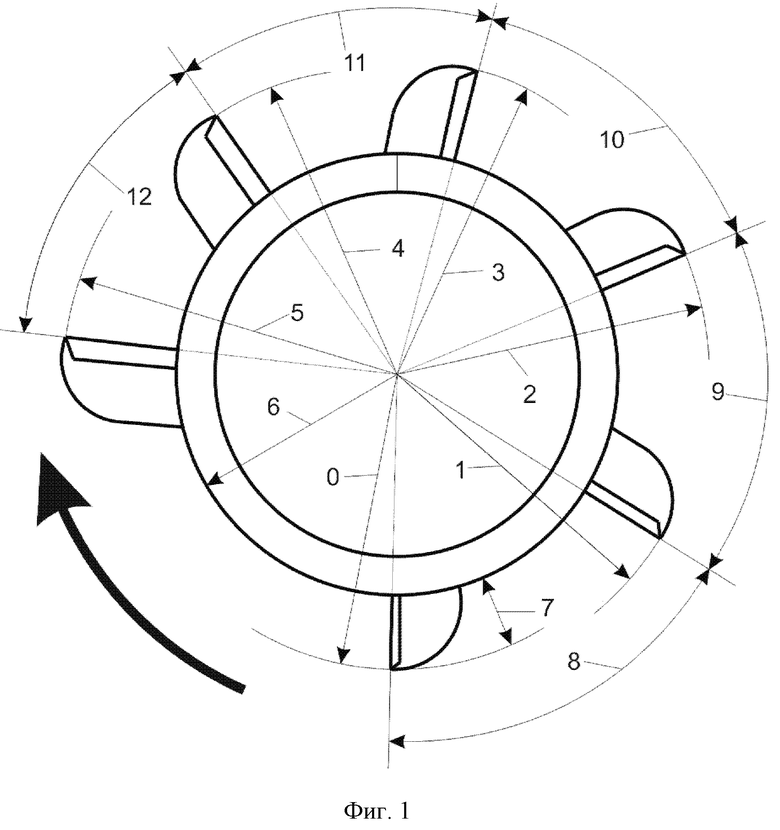
Рабочий орган траншейного экскаватора, состоящий из ротора, выполненного в виде колеса диаметром D с приводом вращения, и n ковшей, размещенных вокруг колеса и соединенных с ним, отличающийся тем, что ковши расположены относительно центра ротора и друг друга в соответствии с соотношениями
 ;
;
 ;
;
 ;
;
 ,
,
где H – минимально допустимая высота ковша,  – порядковый номер ковша с
– порядковый номер ковша с  , равный 1, 2, …, n-1,
, равный 1, 2, …, n-1,  – порядковый номер углового шага между ковшами с
– порядковый номер углового шага между ковшами с  , равный 1, 2, …, n-2, отсчитываемыми против направления вращения ротора,
, равный 1, 2, …, n-2, отсчитываемыми против направления вращения ротора,  – расстояние режущих кромок ковша минимальной высоты от центра ротора,
– расстояние режущих кромок ковша минимальной высоты от центра ротора,  – угловой шаг между ковшом с номером 1 и ковшом, предшествующим ему,
– угловой шаг между ковшом с номером 1 и ковшом, предшествующим ему,  – расстояние режущих кромок -го ковша от центра ротора,
– расстояние режущих кромок -го ковша от центра ротора,  – угловой шаг между -м и
– угловой шаг между -м и  -м ковшами.
-м ковшами.
| Б.Н | |||
| АБРАМОВ и др | |||
| "Многоковшовые экскаваторы: проектирование и расчет | |||
| - Екатеринбург: УрФУ, 2012г | |||
| РАБОЧИЙ ОРГАН РОТОРНОГО ТРАНШЕЙНОГО ЭКСКАВАТОРА | 0 |
|
SU343001A1 |
| РАБОЧИЙ ОРГАН РОТОРНОГО ЭКСКАВАТОРА | 0 |
|
SU347406A1 |
| Рабочий орган роторного экскаватора, например, траншейного | 1976 |
|
SU789651A2 |
| Рабочий орган роторного экскаватора | 1985 |
|
SU1331959A1 |
| РАБОЧИЙ ОРГАН РОТОРНОГО ТРАНШЕЙНОГО ЭКСКАВАТОРА | 1993 |
|
RU2039164C1 |
| US 4976051 A1, 11.12.1990. | |||

