Предлагаемое изобретение относится к землеройной технике и может быть использовано при производстве строительных работ.
В настоящее время различные траншейные роторные экскаваторы известны. Они включают в себя привод (чаще всего дизель-электрический) и генератор переменного тока, выполняющий функции питания привода (Б.Н. Абрамов, О.А. Лукашук. Многоковшовые экскаваторы: проектирование и расчет. – Екатеринбург: УрФУ, 2012, стр. 51-52). Регулирование работы приводов в таких экскаваторах производится путем управления режимами работы дизеля, производимого водителем тягача. При этом водитель зачастую действует интуитивно, не согласуя работу привода тягача с работой ротора экскаватора. Этого недостатка лишен экскаватор, защищенный авторским свидетельством СССР № 1717731 А1, кл. Е02F3/26 (авторы Я.А. Локшин, Ю.К. Мыльников, В.В. Расин). Указанный экскаватор, принятый нами за прототип, содержит электропривод, включающий электродвигатели хода (движения подачи тягача), ротора и транспортера, подключенные к генератору параллельно друг другу, а также пускатель генератора. Электродвигатель хода и генератор образуют, по существу, привод тягача, электродвигатель вращения ротора и тот же генератор образуют привод вращения ротора, а пускатель играет роль преобразователя-регулятора работы приводов тягача, но одновременно с ним и двигателей ротора и отвального транспортера, т.е. скорости работы экскаватора в целом. Управляя приводом тягача, водитель управляет одновременно с этим и приводом ротора, что обеспечивает их согласованную работу: увеличивая подачу на ковш экскаватора (скорость хода тягача), водитель увеличивает и скорость вращения ротора экскаватора и наоборот, уменьшая первое, он уменьшает и второе. Подача на ковш и скорость вращения ротора находятся в функциональной связи. Это повышает надежность экскаватора, поскольку, в определенной степени, защищает привод тягача от перегрузок.
Вместе с тем прототип имеет и существенный недостаток: если водитель увеличит подачу на ковш экскаватора, увеличив скорость тягача, то перегрузка его привода может произойти из-за увеличения текущей плотности грунта разрабатываемой траншеи даже при параллельном росте скорости вращения ротора экскаватора. В результате может произойти авария. Таким образом оказывается, что надёжность экскаватора, защищенного авторским свидетельством – прототипом, не всегда достаточна.
Недостаточная надежность является проблемой, которую призвана разрешить предполагаемое изобретение.
Технически решение этой проблемы осуществляется путем того, что траншейный роторный экскаватор, содержащий ковшовый ротор с приводом его вращения, тягач с приводом подачи, отвальный конвейер с приводом перемещения грунта, выносимого из траншеи ротором и регулятор скорости, отличается от прототипа тем, что он снабжен первым и вторым блоками деления сигналов, блоком настройки средней паспортной подачи экскаватора на ковш, выход которого соединен с шиной ввода делимого первого блока деления, блоком настройки средней паспортной скорости вращения ротора, выход которого соединен с шиной ввода делителя первого блока деления, задатчиком среднего значения коэффициента разрыхления грунта траншеи, подлежащей разработке экскаватором, задатчиком текущей скорости вращения ротора, измерителем текущей плотности грунта, установленным на раме экскаватора между тягачом и ротором, блоком вычисления текущего значения коэффициента разрыхления грунта, вход которого соединен с выходом измерителя, сглаживающим фильтром, вход которого соединен с выходом блока вычисления текущего значения коэффициента разрыхления грунта, трехвходовым блоком умножения сигналов, первый вход которого соединен с выходом первого блока делением сигналов, второй вход соединен с задатчиком среднего значения коэффициента разрыхления грунта, а третий вход соединен с выходом задатчика текущей скорости вращения ротора, при этом выход блока умножения соединен с шиной ввода делимого второго блока деления, выход фильтра соединен с шиной ввода делителя второго блока деления, а регулятор скорости экскаватора выполнен в виде трех автономных блоков-регуляторов, вход первого из которых соединен с выходом задатчика текущей скорости вращения ротора, а выход – с приводом вращения ротора, вход второго соединен со выходом второго блока деления, а выход – с приводом подачи тягача, а третий выполнен в виде блока программирования, соединенного с приводом конвейера.
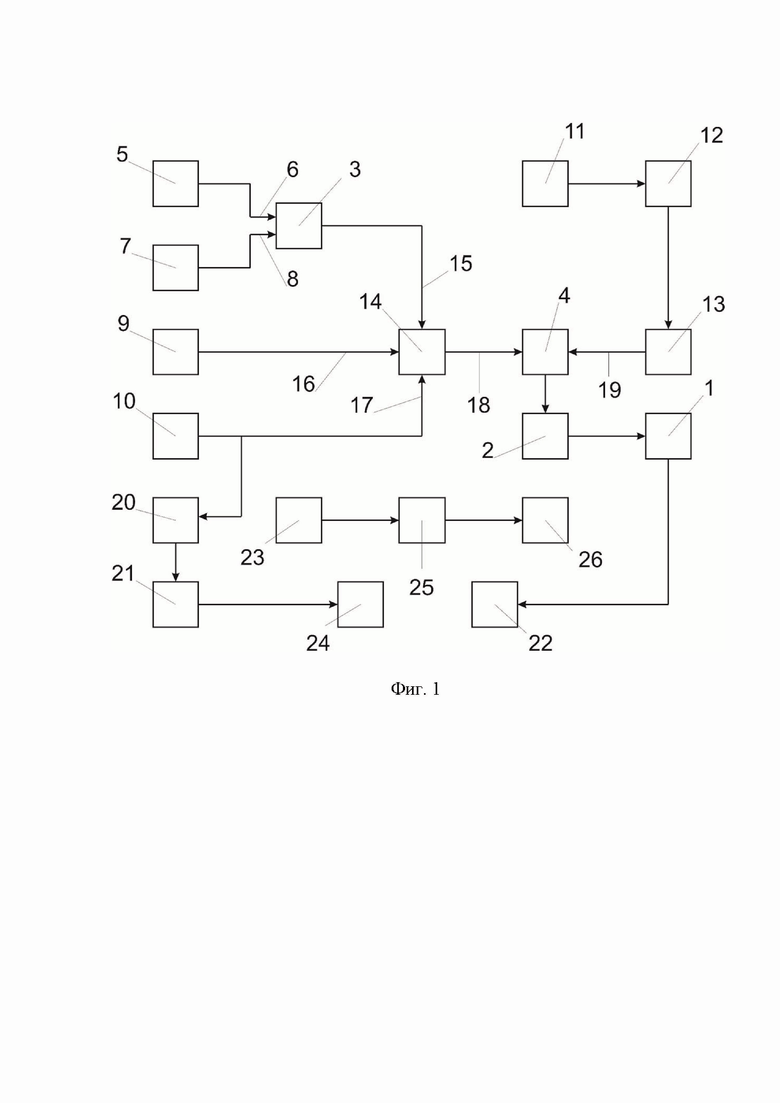
На фиг. 1 приведена блок-схема предлагаемого траншейного роторного экскаватора. Она содержит привод тягача 1 и блок-регулятор 2 подачи экскаватора, выход которого соединен с управляющим входом привода 1, первый 3 и второй 4 блоки деления сигналов, блок 5 настройки средней паспортной подачи экскаватора на ковш, выход которого соединен с шиной 6 ввода делимого первого блока деления 3, блок 7 настройки средней паспортной скорости вращения ротора, выход которого соединен с шиной 8 ввода делителя первого блока деления 3, задатчик 9 среднего значения коэффициента разрыхления грунта траншеи, подлежащей разработке экскаватором, задатчик 10 текущей скорости вращения ротора, измеритель текущей плотности грунта 11, установленный на раме экскаватора между тягачом и ротором, блок 12 вычисления текущего значения коэффициента разрыхления грунта, вход которого соединен с выходом измерителя 11, сглаживающий фильтр 13, вход которого соединен с выходом блока 12 вычисления текущего значения коэффициента разрыхления грунта, трехвходовой блок умножения сигналов 14, первый вход которого 15 соединен с выходом первого блока деления сигналов 3, второй вход 16 соединен с задатчиком 9 среднего значения коэффициента разрыхления грунта, а третий вход 17 соединен с задатчиком 10 текущей скорости вращения ротора. При этом выход блока умножения 14 соединен с шиной 18 ввода делимого второго блока деления 4, выход фильтра 13 соединен с шиной ввода 19 делителя второго блока деления 4, а регулятор скорости экскаватора выполнен в виде трех автономных блоков-регуляторов 20, 2 и 23, вход первого из которых (блока 20) соединен с выходом задатчика 10 текущей скорости вращения ротора, а выход – с приводом 21 вращения ротора 24, вход второго (блока 2) соединен со выходом второго блока деления 4, а выход – с приводом 1 подачи тягача 22, а третий (блока 23) выполнен в виде блока программирования привода 25 отвального конвейера 26.
Блоки 2, 3, 4, 7, 9, 10, 13 и др. построены на типовых элементах автоматики. Измеритель 11 представляет собой бесконтактный ультразвуковой плотномер, выполненный, например, согласно «Способу бесконтактного определения плотности почв», разработанному Л.Т. Филимоновым и др. и защищенному патентом ГДР № 289338 от 25.04.1991, или подобный описанным в работе А.А. Васильева и др. «Прменение ультразвука для определения плотности грунтов» (сайт ofmg.ru>index.php/ofmg/article/view/4553). Блок 12 выполнен в виде преобразователя, реализующего функцию k=f(x), где х – сигнал от измерителя 11, k – коэффициент разрыхления грунта.
При эксплуатации экскаватора вначале настраивают его автоматику. Для этого блоком 5 сначала вводят среднее паспортное значение подачи экскаватора на ковш
С ̅=(C_min+C_max)/2,
где C_max и C_min – наибольшее и наименьшее значения подачи экскаватора на ковш согласно паспорту экскаватора.
После этого блоком 7 вводят среднее паспортное значение скорости вращения ротора экскаватора
n ̅=(n_min+n_max)/2,
где n_max и n_min – наибольшее и наименьшее значения скорости ротора согласно паспорту экскаватора. Далее, основываясь на результатах геологических изысканий, задатчиком 9 вводят среднее значение коэффициента разрыхления грунта k ̅ траншеи, подлежащей разработке экскаватором. Программатором 23 задается целесообразная скорость работы привода 25 конвейера 26. На этом настройка автоматики заканчивается.
После ее завершения экскаватор может запускаться в действие.
Его работа происходит в соответствии с алгоритмом
С=(С ̅⋅k ̅)/(n ̅⋅k)⋅n,
где С – текущая подача экскаватора на ковш, n – текущая скорость вращения ротора экскаватора, k – текущий коэффициент разрыхления грунта траншеи. Запускается он водителем тягача путем ввода задатчиком 10 требуемого значения n. Ротор начинает вращаться, измеритель 11 выдает сигнал, соответствующий текущей плотности грунта траншеи, этот сигнал блоком 12 преобразуется в k, а последнее освобождается от случайных флуктуаций фильтром 13. На шину 18 блока 4 поступает сигнал, отображающий С ̅⋅k ̅⋅n/n ̅, а на шину 19 этого блока – сигнал, отображающий k. На выходе блока 4 появляется сигнал, отображающий С, который, поступая на блок-регулятор 2 и далее на привод тягача 22, заставляет последний двигаться со скоростью, соответствующей С. Если водитель изменит скорость вращения ротора n или изменится текущее значение k, то автоматически изменится и подача на ковш, которую осуществляет тягач экскаватора.
Техническим результатом предложения является повышение надежности экскаватора и, как следствие, предотвращение аварий, вызванных неравномерностью плотности грунта разрабатываемой траншеи.
| название | год | авторы | номер документа |
|---|---|---|---|
| Рабочий орган траншейного экскаватора | 2020 |
|
RU2756339C1 |
| Устройство для автоматическогоОпРЕдЕлЕНия удЕльНОй эНЕРгОЕМ-КОСТи РАбОчЕгО пРОцЕССА МАшиНы | 1979 |
|
SU810898A1 |
| Способ автоматизированного управления рабочим процессом роторного экскаватора и система управления для его осуществления | 1985 |
|
SU1686078A1 |
| Устройство для автоматического управления роторным экскаватором | 1980 |
|
SU876867A1 |
| Устройство для автоматического управления роторным экскаватором | 1980 |
|
SU899763A1 |
| Система автоматизированного управления процессом рытья одноковшовыми экскаваторами траншей для укладки трубопроводов и инженерных коммуникаций преимущественно с негоризонтальным дном и на участках со склонами | 2017 |
|
RU2683451C2 |
| Автоматизированная система управления рабочим процессом роторного экскаватора | 1985 |
|
SU1703797A1 |
| Способ контроля грузонесущей способности ленточного конвейера | 1989 |
|
SU1685834A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ПОВОРОТА ЭКСКАВАТОРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2107778C1 |
| Роторный экскаватор для рытья траншей | 1959 |
|
SU131273A1 |
Изобретение относится к землеройной технике и может быть использовано при производстве строительных работ. Технический результат – повышение надежности экскаватора. Траншейный роторный экскаватор содержит ковшовый ротор с приводом его вращения, тягач с приводом подачи, отвальный конвейер с приводом перемещения грунта, выносимого из траншеи ротором, и регулятор скорости. Экскаватор снабжен первым и вторым блоками деления сигналов, блоком настройки средней паспортной подачи экскаватора на ковш, выход которого соединен с шиной ввода делимого первого блока деления, блоком настройки средней паспортной скорости вращения ротора, выход которого соединен шиной ввода делителя первого блока деления, задатчиком среднего значения коэффициента разрыхления грунта траншеи, подлежащей разработке экскаватором, задатчиком текущей скорости вращения ротора, измерителем грунта, установленным между тягачом и ротором, блоком вычисления текущего значения коэффициента разрыхления грунта, вход которого соединен с выходом измерителя, сглаживающим фильтром, вход которого соединен с выходом блока вычисления текущего значения коэффициента разрыхления грунта, трехвходовым блоком умножения сигналов. При этом первый вход трехвходового блока умножения сигналов соединен с выходом первого блока делением сигналов, второй вход соединен с задатчиком среднего значения коэффициента разрыхления грунта, а третий вход соединен с выходом задатчика текущей скорости вращения ротора. При этом выход блока умножения соединен с шиной ввода делимого второго блока деления, выход фильтра соединен с шиной ввода делителя второго блока деления. Регулятор скорости экскаватора выполнен в виде трех автономных блоков-регуляторов, вход первого из которых соединен с выходом задатчика текущей скорости вращения ротора, а выход – с приводом вращения ротора, вход второго соединен с выходом второго блока деления, а выход – с приводом подачи тягача, а третий выполнен в виде блока программирования, соединенного с приводом отвального конвейера. 1 ил.
Траншейный роторный экскаватор, содержащий ковшовый ротор с приводом его вращения, тягач с приводом подачи, отвальный конвейер с приводом перемещения грунта, выносимого из траншеи ротором, и регулятор скорости, отличающийся тем, что он снабжен первым и вторым блоками деления сигналов, блоком настройки средней паспортной подачи экскаватора на ковш, выход которого соединен с шиной ввода делимого первого блока деления, блоком настройки средней паспортной скорости вращения ротора, выход которого соединен шиной ввода делителя первого блока деления, задатчиком среднего значения коэффициента разрыхления грунта траншеи, подлежащей разработке экскаватором, задатчиком текущей скорости вращения ротора, измерителем грунта, установленным между тягачом и ротором, блоком вычисления текущего значения коэффициента разрыхления грунта, вход которого соединен с выходом измерителя, сглаживающим фильтром, вход которого соединен с выходом блока вычисления текущего значения коэффициента разрыхления грунта, трехвходовым блоком умножения сигналов, первый вход которого соединен с выходом первого блока делением сигналов, второй вход соединен с задатчиком среднего значения коэффициента разрыхления грунта, а третий вход соединен с выходом задатчика текущей скорости вращения ротора, при этом выход блока умножения соединен с шиной ввода делимого второго блока деления, выход фильтра соединен с шиной ввода делителя второго блока деления, регулятор скорости экскаватора выполнен в виде трех автономных блоков-регуляторов, вход первого из которых соединен с выходом задатчика текущей скорости вращения ротора, а выход – с приводом вращения ротора, вход второго соединен с выходом второго блока деления, а выход – с приводом подачи тягача, а третий выполнен в виде блока программирования, соединенного с приводом отвального конвейера.
| Электропривод роторного экскаватора | 1988 |
|
SU1717731A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРИВОДОМ ПОВОРОТА РОТОРНОГО ЭКСКАВАТОРА | 0 |
|
SU368375A1 |
| Устройство для автоматического управления роторным экскаватором | 1980 |
|
SU876867A1 |
| Устройство для автоматического управления роторным экскаватором | 1980 |
|
SU899763A1 |
| Устройство для автоматического управления роторным экскаватором | 1981 |
|
SU988987A1 |
| Устройство для автоматического управления роторным экскаватором | 1987 |
|
SU1434039A1 |
| CN 105849338 A, 10.08.2016. | |||

