Изобретение относится к радиолокационным системам посадки вертолета и может быть использовано при их разработке.
Наиболее близким по технической сущности и достигаемому результату к заявляемому способу обнаружения препятствий в зоне посадки вертолета (прототипом к предполагаемому изобретению) является способ, основанный на применении радиолокационной станции обеспечения безопасной посадки вертолета в условиях отсутствия или ограниченной видимости [описание патента RU 2561496 С1 «Радиолокационная станция обеспечения безопасной посадки вертолета в условиях отсутствия или ограниченной видимости», опубл. 27.08.2015, МПК G01S 13/93].
Способ обнаружения препятствий в зоне посадки вертолета, основанный на применении радиолокационной станции обеспечения безопасной посадки вертолета в условиях отсутствия или ограниченной видимости, включает в себя следующие основные этапы функционирования: излучение радиосигналов по направлению к земной поверхности, прием эхо-сигналов с угловых направлений и по нормали, измерение высоты полета вертолета и обнаружение препятствий.
Недостатком способа-прототипа является низкая вероятность обнаружения препятствий в зоне посадки вертолета из-за обзора земной поверхности в виде сужающегося (расширяющегося) кольца при снижении (взлете) вертолета.
Техническим результатом изобретения способа является повышение вероятности обнаружения препятствий в зоне посадки за счет приема эхо-сигналов непосредственно из зоны посадки вертолета независимо от его высоты.
Указанный технический результат достигается тем, что в известном способе обнаружения препятствий в зоне посадки вертолета, заключающемся в излучении сигналов по направлению к земной поверхности, приеме эхо-сигналов с угловых направлений и по нормали и измерении высоты полета вертолета Hиз, в процессе вертикального снижения осуществляют прием отраженных сигналов с угловых направлений N приемниками, установленными в секторах с  , при этом ось ДН n-ой антенны направляют в точку с полярными координатами
, при этом ось ДН n-ой антенны направляют в точку с полярными координатами  и
и  , где n=1…N, α0=0, R - радиус зоны посадки, измерение высоты полета вертолета осуществляют антенной с шириной ДН
, где n=1…N, α0=0, R - радиус зоны посадки, измерение высоты полета вертолета осуществляют антенной с шириной ДН  , где H0 - высота зависания вертолета перед началом посадки, измеряют дальности до земной поверхности в каждом секторе, рассчитывают по дальности высоту, сравнивают модуль разности измеренной и расчетной высот Δn с пороговым значением hΔ и при выполнении условия |Δn|≥hΔ принимают решение о наличие препятствия в этом секторе, когда Δn>0 или в центральной области зоны посадки в противоположном случае.
, где H0 - высота зависания вертолета перед началом посадки, измеряют дальности до земной поверхности в каждом секторе, рассчитывают по дальности высоту, сравнивают модуль разности измеренной и расчетной высот Δn с пороговым значением hΔ и при выполнении условия |Δn|≥hΔ принимают решение о наличие препятствия в этом секторе, когда Δn>0 или в центральной области зоны посадки в противоположном случае.
Сущность заявляемого способа состоит в том, что в процессе вертикального снижения осуществляют прием отраженных сигналов с угловых направлении N приемниками, установленными в секторах с  , при этом ось ДН n-ой антенны направляют в точку с полярными координатами
, при этом ось ДН n-ой антенны направляют в точку с полярными координатами  и
и  , где n=1…N, α0=0, R - радиус зоны посадки, измерение высоты полета вертолета осуществляют антенной с шириной ДН , где H0 - высота зависания вертолета перед началом посадки, измеряют дальности до земной поверхности в каждом секторе, рассчитывают по дальности высоту, сравнивают модуль разности измеренной и расчетной высот Δn с пороговым значением hΔ и при выполнении условия |Δn|≥hΔ принимают решение о наличие препятствия в этом секторе, когда Δn>0 или в центральной области зоны посадки в противоположном случае.
, где n=1…N, α0=0, R - радиус зоны посадки, измерение высоты полета вертолета осуществляют антенной с шириной ДН , где H0 - высота зависания вертолета перед началом посадки, измеряют дальности до земной поверхности в каждом секторе, рассчитывают по дальности высоту, сравнивают модуль разности измеренной и расчетной высот Δn с пороговым значением hΔ и при выполнении условия |Δn|≥hΔ принимают решение о наличие препятствия в этом секторе, когда Δn>0 или в центральной области зоны посадки в противоположном случае.
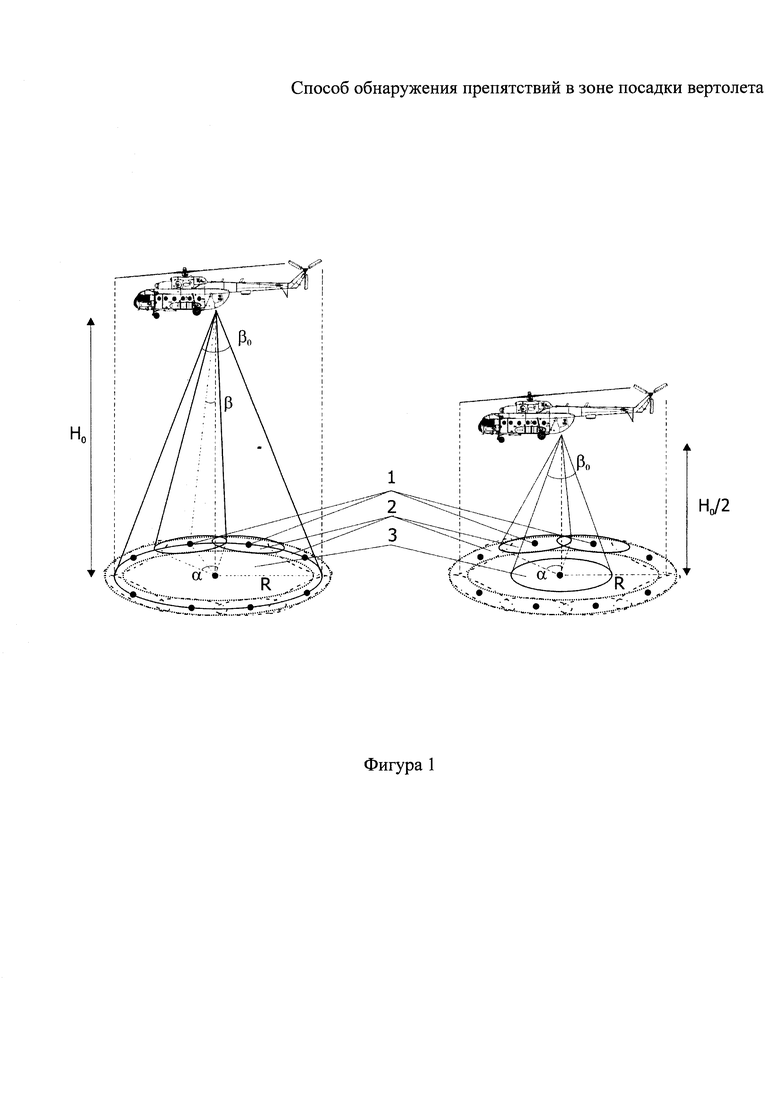
Сущность изобретения поясняется фигурой 1, где обозначено: 1 - точка на земной поверхности с полярными координатами αn и β куда направляется ось ДН n-ой антенны приемника, установленного в секторе с  , 2 - зона приема эхо-сигналов, ограниченная шириной ДН его n-ой антенны, 3 - зона приема эхо-сигналов антенны с шириной ДН β0, R - радиус зоны посадки, H0 - высота зависания вертолета перед началом этапа посадки.
, 2 - зона приема эхо-сигналов, ограниченная шириной ДН его n-ой антенны, 3 - зона приема эхо-сигналов антенны с шириной ДН β0, R - радиус зоны посадки, H0 - высота зависания вертолета перед началом этапа посадки.
На этапе посадки вертолета с высоты H0 прием эхо-сигналов осуществляют с угловых направлений N приемниками, установленными в секторах с , при этом ось ДН n-ой антенны направляют в точку 1. Как видно из фигуры 1, это обеспечивает 360° зону приема вокруг вертолета, внешне напоминающую кольцо, ширина которого равна ДН антенны в вертикальной плоскости. Угол, образованный осью ДН n-ой антенны и нормалью к земной поверхности β, согласно формуле  , зависит от Hиз. В процессе снижения вертолета, например, с высоты H0 до высоты увеличивают этот угол, обеспечивая тем самым прием эхо-сигналов с одной и той же области земной поверхности.
, зависит от Hиз. В процессе снижения вертолета, например, с высоты H0 до высоты увеличивают этот угол, обеспечивая тем самым прием эхо-сигналов с одной и той же области земной поверхности.
По принятым эхо-сигналам определяют дальности до земной поверхности Дn в каждом секторе [Дудник П.И. Авиационные радиолокационные комплексы и системы: учебник для слушателей и курсантов ВУЗов ВВС / П.И. Дудник, Г.С. Кондратенков, Б.Г. Татарский и др. - М.: Изд. ВВИА им. проф Н.Е. Жуковского. 2006, с. 15]. При этом эту дальность определяют по первому принятому эхо-сигналу в этом секторе и в случае наличия препятствия, дальность Дn будет равна расстоянию до этого препятствия. Полученные значения дальностей для каждого сектора приема эхо-сигналов пересчитывают в высоты по формуле Hn=Дn cosβ.
Для определения высоты Hиз используют приемник направленный вертикально вниз, ДНА которого обеспечивает прием эхо-сигналов с участка земной поверхности непосредственно под вертолетом. На высоте H0 этот участок равен размеру зоны посадки с радиусом R, а в процессе снижения вертолета сужается к центру зоны посадки. Так, например, на высоте  размеры этого участка уменьшаются вдвое. При этом высоту Hиз определяют так же по первому принятому эхо-сигналу и в случае наличия препятствия, высота Hиз будет равна расстоянию до этого препятствия. Осуществляют сравнение полученных высот Hиз и Hn для каждого сектора приема эхо-сигналов и при превышении модулем разности Δn=Hиз-Hn порогового значения hΔ принимают решение о наличие препятствия в зоне посадки, а с учетом знака этой разности определяют место нахождения препятствия в центральной области или n-ом секторе на границе зоны посадки.
размеры этого участка уменьшаются вдвое. При этом высоту Hиз определяют так же по первому принятому эхо-сигналу и в случае наличия препятствия, высота Hиз будет равна расстоянию до этого препятствия. Осуществляют сравнение полученных высот Hиз и Hn для каждого сектора приема эхо-сигналов и при превышении модулем разности Δn=Hиз-Hn порогового значения hΔ принимают решение о наличие препятствия в зоне посадки, а с учетом знака этой разности определяют место нахождения препятствия в центральной области или n-ом секторе на границе зоны посадки.
Способ обнаружения препятствий в зоне посадки вертолета может быть реализован, например, с помощью устройства, размещаемого в нижней части фюзеляжа вертолета, схема которого приведена на фигуре 2, где обозначено: 1 - приемный блок определения Hиз, 2 - блок измерения Hиз, 3 - блок вычисления β, 4 - устройство управления, 5 - приемный блок определения Hn, 6 - блок измерения Дn, 7 - блок вычисления Hn, 8 - блок вычисления Δn, 9 - схема сравнения, 10 - блок знаковой функции, 11 - решающее устройство.
Блок 3 осуществляет вычисление угла β наклона антенн приемных блоков определения Hn по формуле  . В процессе снижения вертолета этот угол пересчитываете из-за уменьшения Hиз.
. В процессе снижения вертолета этот угол пересчитываете из-за уменьшения Hиз.
Устройство управления 4 предназначено для управления угловым положением антенн приемных блоков определения Hиз, и может быть выполнено, например, на основе механического привода с синхронным изменением углового положения антенн во всех N приемниках.
Приемный блок определения Hn 5 предназначен для приема эхо-сигналов от одного и того же участка земной поверхности с центром в полярных координатах αn и β вне зависимости от высоты полета вертолета. Он может быть выполнен, например, на основе узконаправленной рупорной антенны в вертикальной плоскости с раскрывом α по горизонтали. В количестве N приемные блоки определения Hn обеспечивают 360° зону приема вокруг вертолета, внешне напоминающую кольцо, ширина которого равна ДН антенн в вертикальной плоскости.
Блок 6 измеряет дальность Дn до земной поверхности в зоне приема блока 5 по первому принятому эхо-сигналу и может функционировать, например, на основе метода определения дальности [Кондратенков Г.С. Авиационные системы радиовидения. Монография / Под ред. Г.С. Кондратенкова. - М.: Радиотехника. 2015, с. 31].
В блоке вычисления Hn 7 производится операция определения значения расчетной высоты по формуле Hn=Дn cosβ по информации от блоков 3 и 6. Блок 8 вычисляет разность измеренной и расчетной высот Δn=Hиз-Hn и может быть выполнен на основе вычитающего устройства. Схема сравнения 9 осуществляет сравнение модуля разности Δn с пороговым значением hΔ, а в блоке знаковой функции 10 производится определение, какое значение имеет разность Δn положительное или отрицательное.
Решающее устройство 11 предназначено для формирования сигнала о наличие препятствия в зоне посадки, на основе поступающих данных со схем сравнения 9 и блоков знаковой функции 10 и может быть выполнено, например, с использованием элементов «и» и «или». Выход с блока 11 является выходом устройства.
Устройство функционирует следующим образом.
После облучения зоны посадки зондирующим сигналом в приемный блок определения Hиз 1 поступают эхо-сигналы. По первому из них в блоке 2 определяется высота Hиз, значение которой поступает в блок вычисления β 3 и блок вычисления Δn 8. В блоке 3 рассчитывается значение угла наклона антенн приемных блоков 5 β, которое поступает в устройство управления 4 и блок вычисления Hn 7. Устройство управления 4 осуществляет управление ДНА приемного модуля 5 для направления ее оси в одну точку на земной поверхности с полярными координатами  и
и  , вне зависимости от высоты полета вертолета.
, вне зависимости от высоты полета вертолета.
С выхода приемного блока определения Hn 5 эхо-сигналы, принятые с угловых направлений от участка земной поверхности находящегося на границе зоны посадки вертолета и центром в точке с полярными координатами αn и β, поступают в блок 6. По первому из них в блоке 6 определяется дальность Дn, значение которой поступает в блок вычисления Hn 7, где производится расчет высоты Hn по формуле Hn=Дn cos β. Далее в блоке 8 вычисляется разность измеренной и расчетной высот Δn=Hиз-Hn, значение которой поступает на схему сравнения 9 и в блок 10. Здесь модуль разности Δn сравнивается с порогом hΔ и определяется в какой области лежит ее значение в положительной или отрицательной. С выходов схемы сравнения 9 и блока знаковой функции 10 данные поступают на вход решающего устройства 11, где при выполнении условия |Δn|≥hΔ и Δn>0 принимается решение о наличие препятствия в n-м секторе на границе зоны посадки вертолета или в центральной области - при условии |Δn| ≥hΔ и Δn<0.
Предлагаемое техническое решение является новым, поскольку из доступных источников неизвестен способ обнаружения препятствий в зоне посадки вертолета, заключающийся в приеме эхо-сигналов непосредственно из зоны посадки вертолета независимо от его высоты.
Предлагаемое техническое решение имеет изобретательский уровень, поскольку из опубликованных научных данных и известных технических решений явным образом не следует, что заявляемый способ обнаружения препятствий в зоне посадки вертолета обеспечивает повышение вероятности обнаружения препятствий в зоне посадки за счет приема эхо-сигналов непосредственно из зоны посадки вертолета независимо от его высоты.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ВЫБОРА ПЛОЩАДКИ ДЛЯ ПОСАДКИ ВОЗДУШНОГО СУДНА ВЕРТОЛЁТНОГО ТИПА | 2019 |
|
RU2737760C1 |
| СПОСОБ ВЫБОРА ПЛОЩАДКИ ДЛЯ ПОСАДКИ ВОЗДУШНОГО СУДНА ВЕРТОЛЕТНОГО ТИПА | 2019 |
|
RU2707275C1 |
| УСТРОЙСТВО ВЫБОРА ПЛОЩАДКИ ДЛЯ ПОСАДКИ ВОЗДУШНОГО СУДНА ВЕРТОЛЁТНОГО ТИПА | 2020 |
|
RU2756596C1 |
| СПОСОБ ОБУЖЕНИЯ ПРИЕМНОЙ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ И МНОГОФУНКЦИОНАЛЬНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ, РЕАЛИЗУЮЩАЯ ЭТОТ СПОСОБ | 2014 |
|
RU2599932C2 |
| СПОСОБ НАВИГАЦИИ, ПОСАДКИ И ВЗЛЕТА ВЕРТОЛЕТА | 2014 |
|
RU2578202C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОЙ ПОСАДКИ ВЕРТОЛЕТА В УСЛОВИЯХ ОТСУТСТВИЯ ИЛИ ОГРАНИЧЕННОЙ ВИДИМОСТИ | 2014 |
|
RU2561496C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ КРУГОВОГО ОБЗОРА | 2012 |
|
RU2522982C2 |
| РАДИОЛОКАЦИОННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ ВЫСОТЫ ПОЛЕТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2588105C2 |
| СПОСОБ ФОРМИРОВАНИЯ ФИКСИРОВАННОЙ СПЕКТРАЛЬНОЙ ЗОНЫ, СВОБОДНОЙ ОТ ПОМЕХ ОТ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ В БОРТОВЫХ ИМПУЛЬСНО-ДОПЛЕРОВСКИХ РАДИОЛОКАТОРАХ | 2023 |
|
RU2834733C1 |
| Посадочный радиолокатор | 2021 |
|
RU2779294C1 |

Изобретение относится к радиолокационным системам посадки вертолета и может быть использовано при их разработке. Достигаемый технический результат - повышение вероятности обнаружения препятствий в зоне посадки за счет приема эхо-сигналов непосредственно из зоны посадки вертолета независимо от его высоты. Сущность изобретения состоит в том, что в процессе вертикального снижения осуществляют прием отраженных сигналов с угловых направлений N приемниками, установленными в секторах с  , при этом ось ДН n-ой антенны направляют в точку с полярными координатами
, при этом ось ДН n-ой антенны направляют в точку с полярными координатами  и
и  , где n=1…N, α0=0, R - радиус зоны посадки, измерение высоты полета вертолета осуществляют антенной с шириной ДН
, где n=1…N, α0=0, R - радиус зоны посадки, измерение высоты полета вертолета осуществляют антенной с шириной ДН  , где H0 - высота зависания вертолета перед началом посадки, измеряют дальности до земной поверхности в каждом секторе, рассчитывают по дальности высоту, сравнивают модуль разности измеренной и расчетной высот Δn с пороговым значением к hΔ и при выполнении условия |Δn|≥hΔ принимают решение о наличие препятствия в этом секторе, когда Δn>0, или в центральной области зоны посадки в противоположном случае. 2 ил.
, где H0 - высота зависания вертолета перед началом посадки, измеряют дальности до земной поверхности в каждом секторе, рассчитывают по дальности высоту, сравнивают модуль разности измеренной и расчетной высот Δn с пороговым значением к hΔ и при выполнении условия |Δn|≥hΔ принимают решение о наличие препятствия в этом секторе, когда Δn>0, или в центральной области зоны посадки в противоположном случае. 2 ил.
Способ обнаружения препятствий в зоне посадки вертолета, заключающийся в излучении сигналов по направлению к земной поверхности, приеме эхо-сигналов с угловых направлений и по нормали и измерении высоты полета вертолета Низ, отличающийся тем, что в процессе вертикального снижения осуществляют прием отраженных сигналов с угловых направлений N приемниками, установленными в секторах с  при этом ось ДН n-й антенны направляют в точку с полярными координатами
при этом ось ДН n-й антенны направляют в точку с полярными координатами  и
и  где α - угол, образованный центрами диаграмм направленности соседних антенн приемников,
где α - угол, образованный центрами диаграмм направленности соседних антенн приемников,  - угол в горизонтальной плоскости между продольной осью вертолета и осью ДН n-ой антенны, β - угол в вертикальной плоскости между осью ДН n-ой антенны и нормалью к земной поверхности, n=1…N, α0=0, R - радиус зоны посадки, измерение высоты полета вертолета осуществляют антенной с шириной ДН
- угол в горизонтальной плоскости между продольной осью вертолета и осью ДН n-ой антенны, β - угол в вертикальной плоскости между осью ДН n-ой антенны и нормалью к земной поверхности, n=1…N, α0=0, R - радиус зоны посадки, измерение высоты полета вертолета осуществляют антенной с шириной ДН  где H0 - высота зависания вертолета перед началом посадки, измеряют дальности до земной поверхности в каждом секторе, рассчитывают по дальности высоту, сравнивают модуль разности измеренной и расчетной высот
где H0 - высота зависания вертолета перед началом посадки, измеряют дальности до земной поверхности в каждом секторе, рассчитывают по дальности высоту, сравнивают модуль разности измеренной и расчетной высот  с пороговым значением hΔ и при выполнении условия
с пороговым значением hΔ и при выполнении условия  принимают решение о наличие препятствия в этом секторе, когда
принимают решение о наличие препятствия в этом секторе, когда  , или в центральной области зоны посадки в противоположном случае.
, или в центральной области зоны посадки в противоположном случае.
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОЙ ПОСАДКИ ВЕРТОЛЕТА В УСЛОВИЯХ ОТСУТСТВИЯ ИЛИ ОГРАНИЧЕННОЙ ВИДИМОСТИ | 2014 |
|
RU2561496C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ УГРОЗЫ СТОЛКНОВЕНИЯ ВЕРТОЛЕТА С НАЗЕМНЫМИ ПРЕПЯТСТВИЯМИ | 2009 |
|
RU2397549C1 |
| РАДИОЛОКАЦИОННЫЙ АВТОНОМНЫЙ СПОСОБ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ ЛЕТАТЕЛЬНОГО АППАРАТА С ПРЕПЯТСТВИЯМИ В ВЕРТИКАЛЬНОЙ ПЛОСКОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2507539C2 |
| Приспособление для изменения длины струны арфы | 1944 |
|
SU67309A1 |
| WO 1999046831 A1, 16.09.1999 | |||
| WO 2001065273 A1, 07.09.2001 | |||
| US 5371581 A, 06.12.1994. | |||

