ОБЛАСТЬ ТЕХНИКИ
[0001] Настоящее изобретение относится к способу помощи при движении и устройству помощи при движении.
УРОВЕНЬ ТЕХНИКИ
[0002] В последние годы изучалась система, которая обнаруживает препятствие, присутствующее на маршруте движения рассматриваемого транспортного средства, и помогает двигаться рассматриваемому транспортному средству в соответствии с состоянием препятствия. Например, в JP 2018-536539 A раскрыт способ управления транспортным средством для обнаружения объекта, такого как припаркованное транспортное средство или пешеход, присутствующий на обочине полосы движения рассматриваемого транспортного средства, и снижения верхнего предельного значения скорости транспортного средства в соответствии с относительной скоростью объекта.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0003] Согласно методике, раскрытой в JP 2018-536539 A, возможно выполнять помощь при движении в соответствии с препятствием, присутствующим на полосе движения рассматриваемого транспортного средства. Однако, когда препятствие присутствует на смежной полосе движения, смежной с полосой движения рассматриваемого транспортного средства, невозможно выполнить помощь при движении в соответствии с таким препятствием.
[0004] Целью настоящего изобретения является выполнение помощи при движении с учетом препятствия, когда препятствие присутствует на смежной полосе движения, смежной с полосой движения рассматриваемого транспортного средства.
[0005] Способ помощи при движении в одном аспекте настоящего изобретения представляет собой способ помощи при движении рассматриваемого транспортного средства с использованием определенных маршрута и скорости транспортного средства. Способ включает в себя этапы, на которых: обнаруживают препятствие на смежной полосе движения полосы движения, по которой движется рассматриваемое транспортное средство; устанавливают диапазон движения сбоку от препятствия со стороны рассматриваемого транспортного средства при обнаружении препятствия; устанавливают по меньшей мере одно из маршрута и скорости транспортного средства таким образом, чтобы рассматриваемое транспортное средство не препятствовало движению другого транспортного средства, движущегося по смежной полосе движения к препятствию в диапазоне движения; и выполняют помощь при движении с использованием установленных маршрута и/или скорости транспортного средства.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0006] Фиг. 1 представляет собой блок-схему конфигурации устройства помощи при движении, общего для вариантов осуществления.
Фиг. 2 представляет собой схему, иллюстрирующую обстановку вокруг рассматриваемого транспортного средства в случае, когда выполняется управление помощью при движении согласно первому варианту осуществления.
Фиг. 3 представляет собой блок-схему последовательности операций, иллюстрирующую управление помощью при движении.
Фиг. 4 представляет собой схему, иллюстрирующую обстановку вокруг рассматриваемого транспортного средства в случае, когда выполняется управление помощью при движении согласно второму варианту осуществления.
Фиг. 5 представляет собой схему, иллюстрирующую обстановку вокруг рассматриваемого транспортного средства в случае, когда выполняется управление помощью при движении согласно третьему варианту осуществления.
Фиг. 6 представляет собой схему, иллюстрирующую обстановку вокруг рассматриваемого транспортного средства согласно другому варианту осуществления.
Фиг. 7 представляет собой блок-схему последовательности операций, иллюстрирующую управление помощью при движении в соответствии с четвертым вариантом осуществления.
Фиг. 8 представляет собой блок-схему последовательности операций, иллюстрирующую управление помощью при движении в соответствии с пятым вариантом осуществления.
Фиг. 9 представляет собой схему, иллюстрирующую обстановку вокруг рассматриваемого транспортного средства в случае, когда выполняется управление помощью при движении согласно шестому варианту осуществления.
ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0007] Далее варианты осуществления настоящего изобретения будут описаны со ссылкой на чертежи и т.п.
[0008] (Первый вариант осуществления)
Фиг. 1 представляет собой блок-схему конфигурации устройства 100 помощи при вождении, общего для вариантов осуществления настоящего изобретения. Как показано на фигуре, устройство 100 помощи при вождении включает в себя камеру 110, приемник 120 GPS, датчик 130, интерфейс 140 связи, картографическую базу 150 данных, указатель 160 поворота (указатель направления), исполнительный механизм 170 и контроллер 180. Устройство 100 помощи при вождении установлено, например, на транспортном средстве (рассматриваемом транспортном средстве А), имеющем функцию автономного вождения или функцию помощи при вождении.
[0009] Камера 110 представляет собой устройство формирования изображений, которое формирует изображение внешней обстановки рассматриваемого транспортного средства А и получает информацию отображения внешней обстановки рассматриваемого транспортного средства А. Камера 110 является, например, контрольными камерами кругового обзора, предусмотренными на внешних сторонах транспортного средства передней, задней и левой и правой дверях рассматриваемого транспортного средства А, передней камерой, предусмотренной на внешней или внутренней стороне ветрового стекла, и задней камерой, предусмотренной на задней части рассматриваемого транспортного средства А. Камера 110 выводит информацию отображения внешней обстановки в контроллер 180.
[0010] Приемник 120 GPS периодически принимает сигнал (данные GPS), передаваемый со спутника GPS. Приемник 120 GPS выводит принятые данные GPS в контроллер 180.
[0011] Датчик 130 включает в себя радар 131, гироскопический датчик 132, датчик 133 скорости транспортного средства и т.п. и обнаруживает состояние движения рассматриваемого транспортного средства А и состояние объекта, присутствующего вокруг рассматриваемого транспортного средства А. Радар 131 обнаруживает объект за пределами рассматриваемого транспортного средства А с использованием радиоволн. Радиоволны представляют собой, например, миллиметровые волны, и радар 131 передает радиоволны в окрестности рассматриваемого транспортного средства А и принимает радиоволны, отраженные объектом, для обнаружения объекта. Радар 131 может получать, например, расстояние или направление до объекта в окрестности в качестве информации об объекте. Гироскопический датчик 132 определяет направление рассматриваемого транспортного средства А. Датчик 133 скорости транспортного средства определяет скорость рассматриваемого транспортного средства А. Датчик 130 выводит полученную информацию об объекте и обнаруженные направление и скорость рассматриваемого транспортного средства А в контроллер 180.
[0012] Интерфейс 140 связи получает окружающую обстановку рассматриваемого транспортного средства А извне посредством беспроводной связи. Интерфейс 140 связи принимает различные типы информации от интеллектуальной транспортной системы (ITS), которая передает, например, информацию о дорожном движении, такую как информация о дорожных пробках и информация о правилах дорожного движения, информацию о погоде и т.п. в режиме реального времени. ITS включает в себя связь транспортное средство-транспортное средство с другим транспортным средством, связь дорога-транспортное средство с придорожным устройством и т.п. Интерфейс 140 связи получает, например, ускорение и замедление другого транспортного средства вокруг рассматриваемого транспортного средства А, относительное местоположение по отношению к рассматриваемому транспортному средству А и т.п. посредством связи транспортное средство-транспортное средство.
[0013] Картографическая база 150 данных хранит картографическую информацию. Картографическая информация включает в себя информацию о форме, включая кривизну поворота, уклон, ширину, ограничение скорости, перекресток, светофор, количество полос движения и т.п. дороги. К картографической информации, хранящейся в картографической базе 150 данных, может обращаться контроллер 180 в любое время, что будет описано ниже.
[0014] Сигнал 160 поворота приводится в действие и останавливается действием водителя или командой от контроллера 180. Информация о работе и остановке сигнала 160 поворота выводится в контроллер 180.
[0015] Исполнительный механизм 170 представляет собой устройство, которое выполняет управление движением рассматриваемого транспортного средства А на основе команды от контроллера 180. Исполнительный механизм 170 включает в себя исполнительный механизм 171 привода, исполнительный механизм 172 тормоза, исполнительный механизм 173 рулевого управления и т.п.
[0016] Исполнительный механизм 171 привода представляет собой устройство для регулировки движущей силы рассматриваемого транспортного средства А. Когда рассматриваемое транспортное средство А представляет собой транспортное средство, оснащенное двигателем в качестве источника привода движения, исполнительный механизм 171 привода включает в себя исполнительный механизм дроссельной заслонки, который регулирует количество воздуха, подаваемого в двигатель (открытие дроссельной заслонки), и клапан впрыска топлива, который регулирует количество топлива, подаваемого в двигатель (количество впрыска топлива).
[0017] Когда рассматриваемое транспортное средство А является гибридным транспортным средством или электромобилем, оснащенным электродвигателем в качестве источника привода движения, исполнительный механизм 171 привода включает в себя схему (инвертор, преобразователь и т.п.), способную регулировать электрическую мощность, подаваемую на электродвигатель.
[0018] Исполнительный механизм 172 тормоза представляет собой устройство, которое приводит в действие тормозную систему в ответ на команду от контроллера 180 и регулирует тормозное усилие, прикладываемое к колесам рассматриваемого транспортного средства А. Исполнительный механизм 172 тормоза включает в себя гидравлический тормоз или рекуперативный тормоз.
[0019] Исполнительный механизм 173 рулевого управления включает в себя вспомогательный электродвигатель, который управляет крутящим моментом рулевого управления в системе рулевого управления с электроусилителем и т.п. Контроллер 180 может управлять работой исполнительным механизмом 173 рулевого управления для управления углом поворота колес.
[0020] Контроллер 180 состоит из компьютера, включающего в себя центральный процессор (ЦП), постоянное запоминающее устройство (ПЗУ), оперативное запоминающее устройство (ОЗМ) и интерфейс ввода/вывода (интерфейс I/O). Контроллер 180 выполняет обработку для реализации конкретного управления посредством исполнения конкретной программы. Контроллер 180 может включать в себя один компьютер или множество компьютеров.
[0021] Контроллер 180 генерирует информацию помощи при движении, указывающую маршрут движения (включая время рулевого управления) до пункта назначения, скорость движения транспортного средства (включая ускорение и замедление) на маршруте и т.п., используя информацию о пункте назначения, картографическую информацию и т.п., и помогает движению рассматриваемого транспортного средства А в соответствии с маршрутом и скоростью транспортного средства, указанными сгенерированной информацией помощи при движении.
[0022] Фиг. 2 представляет собой схему, иллюстрирующую обстановку вокруг рассматриваемого транспортного средства А в случае, когда выполняется управление помощью при движении согласно настоящему варианту осуществления. На этой фигуре показаны две полосы движения из полосы L1 движения для обгона с правой стороны и полосы L2 движения, примыкающей к левой стороне полосы L1 движения для обгона. В этом примере, в случае, когда левостороннее движение требуется по закону или тому подобное, предполагается, что полоса движения для обгона находится с правой стороны, а полоса движения находится с левой стороны. Предполагается, что направления движения по этим полосам L1 и L2 движения идут с нижней стороны к верхней стороне, а сигнал впереди представляет собой стоп-сигнал (красный).
[0023] В полосе L1 движения для обгона движется рассматриваемое транспортное средство A, и перед рассматриваемым транспортным средством A три находящихся впереди транспортных средства B1-B3 остановились перед стоп-линией и выстроились в ряд.
[0024] В полосе L2 движения в левой части фигуры припаркованное транспортное средство C останавливается в левой стороне (ближе к обочине) полосы L2 движения и слева сзади от находящегося впереди транспортного средства B3, расположенного в хвостовой части находящихся впереди транспортных средств B1-B3, находящихся на полосе L1 движения для обгона. Другое транспортное средство D, движущееся к припаркованному транспортному средству C, находится позади припаркованного транспортного средства C. Припаркованное транспортное средство C является примером препятствия и, кроме припаркованного транспортного средства C, стационарным объектом, таким как строительная площадка или движущийся объект с заданной скоростью или меньше, например, пешеход или велосипед, могут быть препятствием. В последующем описании предполагается, что препятствием является припаркованное транспортное средство C.
[0025] Здесь запланированный маршрут движения другого транспортного средства D обозначен пунктирной линией. В соответствии с запланированным маршрутом движения другое транспортное средство D движется по маршруту объезда, который временно смещается в сторону припаркованного транспортного средства C, чтобы объехать припаркованное транспортное средство C. В частности, другое транспортное средство D, движущееся по полосе L2 движения, въезжает на полосу L1 движения для обгона проезжает полосу за центральной линией позади припаркованного транспортного средства C, проходит сбоку от припаркованного транспортного средства C, а затем снова возвращается на полосу L2 движения, чтобы продолжить движение.
[0026] Следовательно, в способе помощи при движении согласно настоящему варианту осуществления, когда рассматриваемое транспортное средство А обнаруживает припаркованное транспортное средство С на смежной полосе L2 движения, контроллер 180 предсказывает маршрут движения другого транспортного средства D, которое объезжает припаркованное транспортное средство С. Контроллер 180 устанавливает диапазон X движения, в котором другое транспортное средство D может двигаться сбоку от припаркованного транспортного средства C на стороне полосы L1 движения. На этой фигуре диапазон X движения предусмотрен таким образом, чтобы иметь заданную длину диапазона в направлении вперед-назад и заданную ширину диапазона в направлении ширины около стороны припаркованного транспортного средства C. На этой фигуре длина диапазона больше, чем вся длина припаркованного транспортного средства C.
[0027] Контроллер 180 выполняет помощь при движении таким образом, что рассматриваемое транспортное средство A, движущееся к остановившемуся находящемуся впереди транспортному средству B3, не останавливается в местоположении, включающем в себя диапазон X движения. Например, на этой фигуре маршрут движения изменен таким образом, что рассматриваемое транспортное средство A останавливается в местоположении A' сбоку от диапазона X движения и напротив припаркованного транспортного средства C. Таким образом, остановившееся рассматриваемое транспортное средство A' не препятствует движению другого транспортного средства D, движущегося сбоку от припаркованного транспортного средства C, чтобы объехать припаркованное транспортное средство C.
[0028] Обращаясь снова к фиг. 1, контроллер 180, который выполняет такое управление, включает в себя функциональные блоки, которые выполняют различные процессы управления, такие как блок 181 определения местоположения рассматриваемого транспортного средства, блок 182 генерации информации помощи при движении, блок 183 получения информации о транспортном средстве в окрестности, блок 184 установки диапазона движения, блок 185 определения обстановки и блок 186 помощи при движении. Далее эти конфигурации будут описаны подробно.
[0029] Блок 181 определения местоположения рассматриваемого транспортного средства постоянно определяет текущее местоположение, скорость транспортного средства и направление движения рассматриваемого транспортного средства А на основе данных GPS от приемника 120 GPS, направление рассматриваемого транспортного средства А, обнаруженное датчиком 130, и скорость транспортного средства. Блок 181 определения местоположения рассматриваемого транспортного средства определяет местоположение рассматриваемого транспортного средства A на карте со ссылкой на картографическую базу 150 данных.
[0030] Блок 181 определения местоположения рассматриваемого транспортного средства получает информацию о дороге вокруг рассматриваемого транспортного средства А на основе определенного текущего местоположения, скорости транспортного средства, направления движения и местоположения на карте рассматриваемого транспортного средства А, информацию отображения внешней обстановки, полученную камерой 110, и информацию об объекте, полученную датчиком 130. Информация о дороге включает в себя информацию о форме, уклоне, ширине, ограничении скорости, перекрестке, светофоре, типе полосы движения, количестве полос движения и т.п. дороги вокруг рассматриваемого транспортного средства А.
[0031] Блок 182 генерации информации помощи при движении генерирует маршрут движения рассматриваемого транспортного средства А на основе информации, такой как местоположение или окружающая дорожная обстановка рассматриваемого транспортного средства А, обнаруженная блоком 181 определения местоположения рассматриваемого транспортного средства, и заданный пункт назначения. Кроме того, блок 182 генерации информации помощи при движении генерирует информацию о скорости (включая ускорение и замедление, время рулевого управления и т.п.) в случае, когда рассматриваемое транспортное средство А движется по маршруту движения. Информация помощи при движении генерируется на основе маршрута движения и информации о скорости, сгенерированных таким образом, и при движении рассматриваемого транспортного средства А оказывается помощь на основе информации помощи при движении.
[0032] Блок 183 получения информации о транспортном средстве в окрестности получает информацию о транспортном средстве в окрестности на основе информации отображения внешней обстановки, полученной камерой 110, информации об объекте, полученной датчиком 130, и окружающей обстановки рассматриваемого транспортного средства А, полученной с помощью интерфейса 140 связи. Информация о транспортном средстве в окрестности включает в себя обстановку движения транспортного средства, движущегося по противоположной полосе движения рассматриваемого транспортного средства А.
[0033] Блок 183 получения информации о транспортном средстве в окрестности использует полученную информацию о транспортном средстве в окрестности для обнаружения отображения сигнала впереди полосы L1 движения, обстановки движения находящегося впереди транспортного средства B, препятствия на смежной полосе L2 движения, наличия или отсутствия другого транспортного средства D, состояния движения другого транспортного средства D и т.п. Препятствием может быть стационарный объект, такой как припаркованное транспортное средство С или строительная площадка, или может быть объект, который движется с заданной скоростью или меньше, например, пешеход или велосипед.
[0034] Блок 184 установки диапазона движения получает маршрут движения, по которому движется другое транспортное средство D, избегая обнаруженного препятствия на смежной полосе L2 движения рассматриваемого транспортного средства A, и устанавливает диапазон X движения сбоку от препятствия. Даже когда другое транспортное средство D фактически не обнаружено, блок 184 установки диапазона движения устанавливает диапазон X движения сбоку от препятствия, исходя из предположения, что другое транспортное средство D приближается к припаркованному транспортному средству C с задней стороны припаркованного транспортного средства C.
[0035] Например, длина диапазона для диапазона X движения в направлении вперед-назад и ширина диапазона для диапазона X движения в направлении ширины транспортного средства определяются следующим образом. Обычно, когда другое транспортное средство D движется, объезжая препятствие, известно, что требуется время объезда около 5-10 секунд от начала поворота в сторону препятствия до возвращения на полосу L2 движения снова. Другое транспортное средство D снижает скорость транспортного средства, объезжая при этом препятствие. Следовательно, диапазон X движения устанавливается сбоку от препятствия, чтобы иметь заданную длину диапазона вокруг препятствия в направлении вперед-назад и иметь заданное направление ширины транспортного средства в направлении ширины транспортного средства. В качестве длины диапазона, например, устанавливается расстояние, на котором предсказывается, что другое транспортное средство D замедляется и движется за половину времени объезда. В качестве ширины диапазона устанавливается длина, полученная путем добавления запаса к ширине транспортного средства другого транспортного средства D. Таким образом, диапазон X движения определяется в соответствии с состоянием движения другого транспортного средства D. Когда другое транспортное средство D не обнаружено, диапазон X движения может быть установлен на основе такой информации, как форма полосы L2 движения и установленная правилами движения скорость.
[0036] Блок 185 определения обстановки определяет обстановку движения рассматриваемого транспортного средства A. Например, когда предсказывается, что находящееся впереди транспортное средство B3 остановится непосредственно перед рассматриваемым транспортным средством A, и когда помощь при движении выполняется с использованием информации помощи при движении, сгенерированной блоком 182 генерации информации о помощи при движении, блок 185 определения обстановки определяет, присутствует ли рассматриваемое транспортное средство A в диапазоне X движения в течение заданного порогового времени или более. В нижеследующем описании тот факт, что рассматриваемое транспортное средство A находится в диапазоне X движения в течение заданного порогового времени или более, упоминается как «пребывание».
[0037] Когда определено, что рассматриваемое транспортное средство А пребывает в диапазоне X движения, блок 185 определения обстановки изменяет информацию помощи при движении и управляет рассматриваемым транспортным средством A так, чтобы оно не пребывало в диапазоне X движения. Таким образом, рассматриваемое транспортное средство A не останавливается в диапазоне X движения, и другое транспортное средство D может двигаться в диапазоне X движения, чтобы объехать препятствие, и, таким образом, рассматриваемое транспортное средство A не может препятствовать движению другого транспортного средства D.
[0038] Блок 186 помощи при движении выполняет помощь при движении рассматриваемого транспортного средства A. Когда информация помощи при движении изменяется блоком 185 определения обстановки, блок 186 помощи при движении выполняет помощь при движении рассматриваемого транспортного средства A на основе измененной информации помощи при движении. Блок 186 помощи при движении может не только управлять рассматриваемым транспортным средством А в соответствии с информацией помощи при движении, указывающей информацию о маршруте и информацию о скорости, но также может предоставлять информацию помощи при движении водителю посредством отображения пиктограммы на дисплее рассматриваемого транспортного средства А и передачи голосового сообщения. Поэтому, в случае, когда уровень автоматизированного вождения низкий или т.п., управление помощью при движении согласно настоящему варианту осуществления может быть реализовано посредством дисплея.
[0039] Фиг. 3 представляет собой блок-схему последовательности операций управления помощью при движении, выполняемого контроллером 180. Управление помощью при движении многократно выполняется в предварительно определенном цикле. Управление помощью при движении может выполняться посредством исполнения программы, хранящейся в контроллере 180.
[0040] На этапе S1 контроллер 180 (блок 182 генерации информации помощи при движении) определяет маршрут движения и информацию о скорости рассматриваемого транспортного средства A на основе местоположения рассматриваемого транспортного средства A, определенного блоком 181 определения местоположения рассматриваемого транспортного средства, такой информации, как установленный пункт назначения и т.п. Соответственно генерируется информация помощи при движении.
[0041] На этапе S2 контроллер 180 (блок 183 получения информации о транспортном средстве в окрестности) предсказывает состояние движения находящегося впереди транспортного средства B3 непосредственно перед рассматриваемым транспортным средством A в соответствии со стоп-сигналом или т.п. впереди рассматриваемого транспортного средства A, и определяет, выполняет ли рассматриваемое транспортное средство A управление остановкой. Когда рассматриваемое транспортное средство A выполняет управление остановкой (S2: Да), далее выполняется обработка этапа S3. Когда рассматриваемое транспортное средство A не выполняет управление остановкой (S2: Нет), далее выполняется помощь при движении с использованием информации помощи при движении, сгенерированной на этапе S1, в обработке этапа S7.
[0042] На этапе S3 контроллер 180 (блок 183 получения информации о транспортном средстве в окрестности) обнаруживает в качестве препятствия объект, который движется с заданной скоростью или меньше или останавливается на смежной полосе L2 движения рассматриваемого транспортного средства A. Когда обнаружено препятствие (S3: Да), далее выполняется обработка этапа S4. Когда препятствие не обнаружено (S3: Нет), далее выполняется управление помощью при движении в обработке этапа S7.
[0043] На этапе S4 контроллер 180 (блок 184 установки диапазона движения) предсказывает извилистый маршрут, по которому движется другое транспортное средство D, движущееся позади препятствия на смежной полосе движения, при объезде препятствия, и устанавливает диапазон X движения, в котором другое транспортное средство D может двигаться, сбоку от препятствия. Даже когда другое транспортное средство D не присутствует, диапазон X движения устанавливается исходя из предположения, что другое транспортное средство D находится позади препятствия.
[0044] На этапе S5, когда используется информация помощи при движении, сгенерированная блоком 182 генерации информации помощи при движении, контроллер 180 (блок 185 определения обстановки) определяет, присутствует ли рассматриваемое транспортное средство А, то есть пребывает ли оно, в диапазоне X движения, установленном блоком 184 установки диапазона движения в течение заданного времени или более. Когда рассматриваемое транспортное средство A пребывает в диапазоне X движения (S5: Да), далее выполняется обработка этапа S6 для изменения информации помощи при движении. С другой стороны, когда рассматриваемое транспортное средство A не пребывает в диапазоне X движения в течение заданного времени или более (S5: Да), далее выполняется обработка этапа S7.
[0045] При обработке этапа S6 контроллер 180 (блок 185 определения обстановки) изменяет информацию помощи при движении таким образом, что рассматриваемое транспортное средство A отсутствует в диапазоне X движения в течение заданного времени или более. Например, маршрут движения изменяется таким образом, что рассматриваемое транспортное средство A останавливается до диапазона X движения и останавливается впереди диапазона движения X или сбоку от диапазона X движения, если есть пространство. Когда предсказано, что находящееся впереди транспортное средство B3 немедленно снова начнет движение, рассматриваемое транспортное средство A может быть замедлено до тех пор, пока находящееся впереди транспортное средство B3 снова не начнет движение.
[0046] На этапе S7 контроллер 180 (блок 186 помощи при движении) помогает при движении рассматриваемого транспортного средства А в соответствии с информацией помощи при движении. Когда информация помощи при движении изменена на этапе S6, помощь при движении выполняется на основе измененной информации помощи при движении. В результате, поскольку рассматриваемое транспортное средство A не пребывает в диапазоне X движения, рассматриваемое транспортное средство A не может препятствовать движению другого транспортного средства D, движущегося по смежной полосе L2 движения, чтобы объехать препятствие.
[0047] При обработке этапа S2 контроллер 180 (блок 183 получения информации о транспортном средстве в окрестности) определяет, выполняет ли рассматриваемое транспортное средство A управление остановкой, но контроллер 180 этим не ограничивается. Например, контроллер 180 может определить, замедляется ли рассматриваемое транспортное средство А или движется ли оно медленно с заданной скоростью или меньше. В соответствии с таким определением, когда рассматриваемое транспортное средство А замедляется или движется медленно, возможно определить, присутствует ли рассматриваемое транспортное средство А в диапазоне X движения в течение заданного времени на последующем этапе S5.
[0048] На этапе S5 контроллер 180 (блок 185 определения обстановки) определяет, присутствует ли рассматриваемое транспортное средство A в диапазоне X движения, установленном блоком 184 установки диапазона движения, в течение заданного времени или более, то есть определяет, пребывает ли рассматриваемое транспортное средство А в диапазоне X движения, но контроллер 180 не ограничивается этим. Контроллер 180 может определять, остановлено ли рассматриваемое транспортное средство A в диапазоне X движения, и с помощью такого управления определением предотвращается остановка рассматриваемого транспортного средства A в диапазоне X движения и препятствование движению другого транспортного средства D. Контроллер 180 может определять, препятствует ли рассматриваемое транспортное средство A движению другого транспортного средства D в диапазоне X движения, не ограничиваясь определением того, пребывает или останавливается ли рассматриваемое транспортное средство A в диапазоне X движения, и возможно предотвратить препятствование движению другого транспортного средства D рассматриваемым транспортным средством А с помощью этого управления определением.
[0049] При обработке этапа S6 контроллер 180 (блок 185 определения обстановки) изменяет информацию помощи при движении, но контроллер 180 этим не ограничивается. Например, в случае, когда информация помощи при движении устанавливается с заданным интервалом, информация помощи при движении не изменяется, а устанавливается с заранее заданным циклом, так что рассматриваемое транспортное средство А отсутствует в диапазоне Х движения в течение заданного времени.
[0050] Управление помощью при движении на этапах S1-S7 также выполняется, когда другое транспортное средство D не движется в смежной полосе L2 движения. То есть, когда на смежной полосе L2 движения обнаруживается препятствие, контроллер 180 устанавливает диапазон X движения, исходя из предположения, что другое транспортное средство D движется, даже если другое транспортное средство D не обнаружено позади препятствия. Таким образом, можно предотвратить препятствование движению другого транспортного средства D другим транспортным средством D на смежной полосе движения.
[0051] В соответствии с первым вариантом осуществления могут быть получены следующие эффекты.
[0052] Согласно способу помощи при движении по первому варианту осуществления, препятствие обнаруживается на смежной полосе L2 движения рассматриваемого транспортного средства A (S3: Да), диапазон X движения на стороне полосы L1 движения рассматриваемого транспортного средства A, в котором другое транспортное средство D, движущееся к препятствию в смежной полосе L2 движения, может двигаться, объезжая препятствие, устанавливается сбоку от препятствия (S4), определяется, препятствует ли рассматриваемое транспортное средство A движению другого транспортного средства D в диапазоне X движения (S5), маршрут и скорость транспортного средства устанавливаются таким образом, чтобы не препятствовать движению (S6), когда движению препятствуют (S5: Да), и помощь при движении выполняется с использованием установленного маршрута и скорости транспортного средства (S7).
[0053] Здесь, в состоянии, в котором рассматриваемое транспортное средство A пребывает в диапазоне X движения сбоку от препятствия, поскольку маршрут движения другого транспортного средства D заблокирован рассматриваемым транспортным средством A, другое транспортное средство D, движущееся в направлении препятствия на смежной полосе L2 движения не может двигаться сбоку от препятствия, чтобы объехать препятствие. Однако рассматриваемое транспортное средство A не препятствует движению другого транспортного средства D в диапазоне X движения за счет управления помощью при движении по настоящему варианту осуществления. В результате можно избежать возникновения затора из-за того, что другое транспортное средство D движется к припаркованному транспортному средству C, что потенциально может произойти.
[0054] Если рассматриваемое транспортное средство A и другое транспортное средство D останавливаются сбоку от припаркованного транспортного средства C, может возникнуть затор. В таком состоянии, когда транспортное средство экстренной помощи движется к припаркованному транспортному средству C на смежной полосе движения, рассматриваемому транспортному средству A и другому транспортному средству D необходимо переместиться, чтобы транспортное средство экстренной помощи могло двигаться, но для выполнения такого перемещения автоматически или вручную требуется время. В настоящем варианте осуществления, поскольку затор устраняется без препятствия движению другого транспортного средства D сбоку от препятствия, транспортное средство экстренной помощи может двигаться сбоку от припаркованного транспортного средства C. Кроме того, поскольку другое транспортное средство D может двигаться, объезжая припаркованное транспортное средство C, возможно повысить эффективность использования топлива.
[0055] В соответствии со способом помощи при движении по первому варианту осуществления, более конкретно, определяется, пребывает ли рассматриваемое транспортное средство А в диапазоне X движения в течение заданного времени или более (S5), маршрут и скорость транспортного средства устанавливаются такими что рассматриваемое транспортное средство A отсутствует в диапазоне X движения (S6), когда рассматриваемое транспортное средство A пребывает в диапазоне X движения в течение заданного времени или более, и помощь при движении выполняется с использованием измененного маршрута и скорости транспортного средства (S7). Таким образом, поскольку рассматриваемое транспортное средство A не пребывает в области X движения в течение заданного времени или более, другое транспортное средство D может двигаться в области X движения, чтобы объехать препятствие. В результате возможно предотвратить препятствование движению другого транспортного средства D рассматриваемым транспортным средством D в области X движения.
[0056] В соответствии со способом помощи при движении по первому варианту осуществления маршрут изменяется таким образом, что рассматриваемое транспортное средство А останавливается за пределами диапазона Х движения. Посредством установки местоположения остановки рассматриваемого транспортного средства А за пределами области Х движения таким образом, предотвращается препятствование движению другого транспортного средства D в области X движения рассматриваемым транспортным средством A. Предпочтительно, чтобы такая помощь при движении выполнялась, когда предсказывается, что рассматриваемое транспортное средство A находится в области X движения в течение относительно длительного времени. Когда рассматриваемое транспортное средство A пребывает в диапазоне X движения в течение длительного времени, даже если скорость транспортного средства изменяется, может быть трудно в достаточной степени сократить время присутствия рассматриваемого транспортного средства A в диапазоне X движения. Поэтому посредством изменения маршрута таким образом, что рассматриваемое транспортное средство A останавливается за пределами диапазона X движения, возможно предотвратить то, что рассматриваемое транспортное средство A пребывает в диапазоне X движения и предотвратить то, что рассматриваемое транспортное средство A препятствует движению другого транспортного средства D.
[0057] Когда ширина полосы движения широкая и пространство для остановки рассматриваемого транспортного средства A находится сбоку от диапазона X движения в полосе L1 движения, маршрут изменяется таким образом, что рассматриваемое транспортное средство A останавливается сбоку от диапазона X движения. С помощью этого управления рассматриваемое транспортное средство A останавливается за пределами диапазона X движения, и очередь транспортных средств при заторе, которая может возникнуть позади полосы движения рассматриваемого транспортного средства A, может быть короче, чем в случае, когда рассматриваемое транспортное средство A останавливается до диапазона X движения.
[0058] В соответствии со способом помощи при движении по первому варианту осуществления скорость изменяется таким образом, что рассматриваемое транспортное средство А не останавливается в диапазоне X движения. Предпочтительно, чтобы такая помощь при движении выполнялась, когда предсказано, что рассматриваемое транспортное средство A находится в диапазоне X движения в течение относительно короткого времени. Когда время, в течение которого рассматриваемое транспортное средство A находится в диапазоне X движения, дольше порогового времени, но является относительно коротким, существует вероятность того, что пребывание в диапазоне X движения может быть устранено посредством изменения скорости транспортного средства без изменения маршрута движения. Например, когда находящееся впереди транспортное средство B3 собирается снова начать движение, рассматриваемое транспортное средство A может быть замедлено без остановки, и рассматриваемое транспортное средство A может двигаться в диапазоне X движения, пока транспортное средство снова не начнет движение. Если начало движения снова находящегося впереди транспортного средства B3 подтверждено, рассматриваемое транспортное средство A может снова ускориться. Таким образом, поскольку остановка и начало движения снова рассматриваемого транспортного средства А сокращается, возможно предотвратить возникновение качки в направлении вперед-назад.
[0059] (Модификация)
В первом варианте осуществления был описан пример, в котором диапазон X движения устанавливается в соответствии с состоянием движения другого транспортного средства D. В настоящей модификации будет описан пример, в котором длина диапазона для диапазона X движения в направлении вперед-назад и ширина диапазона для диапазона X движения в направлении ширины транспортного средства изменяются из-за других факторов.
[0060] В качестве первого примера, по мере того, как скорость другого транспортного средства D увеличивается, длина диапазона и ширина диапазона для диапазона X движения устанавливаются большими. По мере того, как скорость другого транспортного средства D увеличивается, скорость другого транспортного средства D при объезде препятствия увеличивается. Поэтому поскольку расстояние движения за заданное количество секунд увеличивается, необходимо увеличить длину диапазона. Кроме того, поскольку необходимо увеличить запас в направлении ширины транспортного средства, необходимо увеличить ширину диапазона. Таким образом, увеличивая длину диапазона и ширину диапазона по мере того, как скорость другого транспортного средства D становится выше, возможно предотвратить, чтобы рассматриваемое транспортное средство A препятствовало движению другого транспортного средства D сбоку от препятствия. Когда скорость другого транспортного средства D увеличивается, возможно уменьшить вероятность того, что рассматриваемое транспортное средство A будет препятствовать движению другого транспортного средства D, посредством изменения только одного из длины диапазона и ширины диапазона.
[0061] В качестве второго примера, чем меньше ширины транспортных средств на полосах L1 и L2 движения, тем большими устанавливаются длина диапазона и ширина диапазона для диапазона X движения. Поскольку ширина транспортного средства меньше, необходимо увеличить запас в направлении ширины транспортного средства, когда другое транспортное средство D объезжает препятствие. Таким образом, чем меньше ширины транспортных средств на полосах L1 и L2 движения, тем большей устанавливается ширина диапазона для диапазона X движения, в котором другое транспортное средство D может двигаться сбоку от препятствия, и, таким образом, возможно предотвратить то, что рассматриваемое транспортное средство А препятствует движению другого транспортного средства D сбоку от препятствия.
[0062] В качестве третьего примера, чем больше препятствие, тем больше длина диапазона и ширина диапазона для диапазона X движения. Когда размер препятствия больше, маршрут объезда препятствия другого транспортного средства D становится длиннее, и, таким образом, увеличиваются длина диапазона и ширина диапазона для диапазона X движения. Таким образом, поскольку в качестве диапазона X движения сбоку от препятствия задана достаточно большая область, возможно предотвратить то, что рассматриваемое транспортное средство A препятствует движению другого транспортного средства D, когда другое транспортное средство D движется, объезжая относительно большое препятствие. Когда препятствие больше, возможно уменьшить вероятность того, что рассматриваемое транспортное средство A будет препятствовать движению другого транспортного средства D, посредством изменения только одного из длины диапазона и ширины диапазона.
[0063] (Второй вариант осуществления)
В первом варианте осуществления был описан пример, в котором соседняя полоса L2 движения, в которой обнаружено припаркованное транспортное средство С, находится в том же направлении движения, что и полоса L1 движения рассматриваемого транспортного средства А. Во втором варианте осуществления будет описан пример, в котором смежная полоса L2 движения является полосой движения, противоположной полосе L1 движения рассматриваемого транспортного средства A.
[0064] Фиг. 4 представляет собой схему, иллюстрирующую обстановку вокруг рассматриваемого транспортного средства А в случае, когда выполняется управление помощью при движении согласно второму варианту осуществления. На этой фигуре в случае, когда левостороннее движение требуется по закону или т.п., показаны две полосы L1 движения с левой стороны фигуры и противоположная полоса L2 движения с правой стороны фигуры, и сигнал впереди полосы движения L1 является стоп-сигналом (красным). Управление помощью при движении по настоящему варианту осуществления является таким же, как управление помощью при движении по первому варианту осуществления, показанному на фиг. 3.
[0065] В полосе L1 движения движется рассматриваемое транспортное средство A, и множество находящихся впереди транспортных средств B1-B3 остановились и образуют ряд до стоп-линии перед рассматриваемым транспортным средством A. На противоположной полосе L2 движения, припаркованное транспортное средство C остановлено справа позади находящегося впереди транспортного средства B3 на полосе L1 движения. Другое транспортное средство D движется к припаркованному транспортному средству C позади (верхняя сторона рисунка) припаркованного транспортного средства C.
[0066] Здесь запланированный маршрут движения другого транспортного средства D указан пунктирной линией, и другое транспортное средство D движется по маршруту объезда, который временно смещается в сторону припаркованного транспортного средства C, чтобы объехать припаркованное транспортное средство C. В частности, другое транспортное средство D, движущееся по противоположной полосе L2 движения, въезжает на полосу L1 движения за центральной линией позади припаркованного транспортного средства C, проходит сбоку от припаркованного транспортного средства C, а затем снова возвращается на противоположную полосу L2 движения, чтобы продолжить движение.
[0067] Поэтому в случае, когда находящееся впереди транспортное средство B3 находится перед рассматриваемым транспортным средством A и управление остановкой находится в ходе выполнения, когда контроллер 180 обнаруживает припаркованное транспортное средство C на противоположной полосе L2 движения, контроллер 180 предсказывает маршрут движения другого транспортного средства D, чтобы объехать припаркованное транспортное средство C. Затем контроллер 180 устанавливает диапазон X движения, в котором другое транспортное средство D может двигаться рядом с припаркованным транспортным средством C по полосе L1 движения рассматриваемого транспортного средства A, и выполняет помощь при движении таким образом, что рассматриваемое транспортное средство A не пребывает в диапазоне X движения. Например, на этой фигуре маршрут движения изменяется таким образом, что рассматриваемое транспортное средство A останавливается на стороне, противоположной припаркованному транспортному средству C относительно диапазона X движения. Таким образом, возможно предотвратить то, что остановившееся рассматриваемое транспортное средство А препятствует движению другого транспортного средства D, движущегося по противоположной полосе L2 движения.
[0068] Как описано выше, даже когда смежная полоса движения рассматриваемого транспортного средства A является противоположной полосой L2 движения, и припаркованное транспортное средство C на противоположной полосе L2 движения обнаруживается во время управления остановкой рассматриваемого транспортного средства A, возможно предотвратить препятствие движению другого транспортного средства D, движущегося по противоположной полосе L2 движения, посредством выполнения способа помощи при движении согласно настоящему варианту осуществления.
[0069] В соответствии со вторым вариантом осуществления могут быть получены следующие эффекты.
[0070] Согласно способу помощи при движении по второму варианту осуществления, диапазон X движения устанавливается сбоку от препятствия на стороне полосы L1 движения, так что другое транспортное средство D, движущееся по смежной полосе L2 движения, которая является противоположной полосой движения, может объехать препятствие, и информация помощи при движении изменяется таким образом, что рассматриваемое транспортное средство A не препятствует движению другого транспортного средства D, движущегося по смежной полосе L2 движения в диапазоне X движения. Более конкретно, рассматриваемое транспортное средство A отсутствует в диапазоне X движения в течение заданного времени или более, и диапазон X движения пуст сбоку от препятствия, тем самым предотвращая то, что рассматриваемое транспортное средство A препятствует движению другого транспортного средства D. В результате возможно избежать возникновения затора из-за того, что другое транспортное средство D движется к припаркованному транспортному средству C.
[0071] (Третий вариант осуществления)
В первом или втором варианте осуществления был описан случай, когда смежная полоса движения, примыкающая к полосе движения рассматриваемого транспортного средства А, представляет собой полосу линейного движения, но настоящее изобретение не ограничивается этим. В третьем варианте осуществления будет описан пример, в котором Т-образный перекресток, соединенный с боковой дорогой, присутствует на смежной полосе движения полосы движения рассматриваемого транспортного средства А.
[0072] Фиг. 5 представляет собой схему, иллюстрирующую обстановку вокруг рассматриваемого транспортного средства А в случае, когда выполняется управление помощью при движении согласно третьему варианту осуществления. На этой фигуре по сравнению с обстановкой вокруг рассматриваемого транспортного средства А первого варианта осуществления, показанной на фиг. 2, на полосе L2 движения предусмотрен Т-образный перекресток, пересекающийся с боковой дорогой. Припаркованное транспортное средство C находится впереди Т-образного перекрестка (в верхней части фигуры). Противоположные полосы L3 и L4 движения показаны справа от полос L1 и L2 движения.
[0073] На таком Т-образном перекрестке показано другое транспортное средство Е, которое выполняет смену полосы движения таким образом, что другое транспортное средство Е поворачивает налево с боковой дороги и въезжает на полосу L2 движения. Чтобы двигаться так, чтобы повернуть вокруг припаркованного транспортного средства С, другое транспортное средство Е движется по извилистому маршруту, по которому другое транспортное средство Е временно въезжает на полосу L2 движения за центральной линией, а затем снова возвращается на полосу L1 движения. Поэтому, когда контроллер 180 обнаруживает боковую дорогу, образующую Т-образный перекресток, и припаркованное транспортное средство вблизи бокового участка, контроллер 180 устанавливает в качестве диапазона X движения область, которая может быть маршрутом движения другого транспортного средства E, с правой стороны припаркованного транспортного средства C со стороны полосы L1 движения и изменяет информацию управления движением таким образом, что рассматриваемое транспортное средство A не пребывает в диапазоне X движения. Даже когда другое транспортное средство E, движущееся по боковой дороге, не обнаружено, контроллер 180 предполагает, что другое транспортное средство Е движется с боковой дороги, и устанавливает диапазон Х движения сбоку от припаркованного транспортного средства С, чтобы не допустить, чтобы рассматриваемое транспортное средство А препятствовало другому транспортному средству Е.
[0074] Здесь ширина диапазона и длина диапазона для диапазона X движения в этом примере больше, чем ширина диапазона и длина диапазона первого варианта осуществления, показанного на фиг. 2. Маршрут объезда, по которому другое транспортное средство D объезжает припаркованное транспортное средство C со стороны боковой дороги и движется по смежной полосе L2 движения, имеет большой поворот по сравнению с маршрутом объезда, по которому другое транспортное средство D объезжает припаркованное транспортное средство C, как показано в первом варианте осуществления, и, таким образом, его необходимо увеличить в направлении ширины. Кроме того, поскольку другое транспортное средство Е выполняет поворот налево вместо объезда, длина диапазона полосы L2 движения в направлении вперед-назад становится короткой. Поэтому, когда припаркованное транспортное средство С находится вблизи Т-образного перекрестка, посредством установки короткой длины диапазона и большей ширины диапазона, возможно предотвратить то, что рассматриваемое транспортное средство А препятствует движению другого транспортного средства D.
[0075] Фиг. 6 представляет собой схему, иллюстрирующую обстановку вокруг рассматриваемого транспортного средства А в случае, когда выполняется управление помощью при движении согласно другому примеру. На этой фигуре по сравнению с обстановкой вокруг рассматриваемого транспортного средства А второго варианта осуществления, показанного на фиг. 4, Т-образный перекресток, пересекающийся с боковой дорогой, обеспечен на противоположной полосе L2 движения. Припаркованное транспортное средство C находится впереди (нижняя сторона фигуры) Т-образного перекрестка.
[0076] На таком Т-образном перекрестке показано другое транспортное средство Е, которое выполняет смену полосы движения таким образом, что другое транспортное средство Е поворачивает налево с боковой дороги и въезжает на полосу L2 движения. Чтобы двигаться так, чтобы повернуть вокруг припаркованного транспортного средства С, другое транспортное средство Е движется по маршруту, по которому другое транспортное средство Е временно въезжает на полосу L1 движения за центральной линией, а затем снова возвращается на полосу L2 движения. Поэтому контроллер 180 устанавливает в качестве диапазона X движения область, которая может быть маршрутом движения другого транспортного средства D с левой стороны от припаркованного транспортного средства C, и изменяет информацию управления движением таким образом, чтобы рассматриваемое транспортное средство A не пребывало в диапазоне X движения. Таким образом, возможно предотвратить то, что рассматриваемое транспортное средство A препятствует движению другого транспортного средства D сбоку от припаркованного транспортного средства C. Подобно примеру, показанному на фиг. 5, диапазон X движения в этом примере имеет большую ширину диапазона и меньшую длину диапазона, чем ширина диапазона и длина диапазона для диапазона X движения во втором варианте осуществления, показанном на фиг. 4.
[0077] В примерах на фиг. 5 и 6 описан пример, в котором предусмотрен Т-образный перекресток, но настоящее изобретение не ограничивается этим. Например, даже когда место парковки обеспечено рядом со смежной полосой L2 движения, и припаркованное транспортное средство С находится вблизи выезда с места парковки, возможно предотвратить то, что рассматриваемое транспортное средство А препятствует движению другого транспортного средства D сбоку от припаркованного транспортного средства C посредством выполнения управления помощью при движении согласно настоящему варианту осуществления.
[0078] В соответствии с третьим вариантом осуществления могут быть получены следующие эффекты.
[0079] Согласно способу помощи при движении по третьему варианту осуществления, длина диапазона для диапазона X движения меньше, а ширина диапазона больше, чем меньше расстояние от боковой дороги, по которой может въехать другое транспортное средство D, до препятствия. Маршрут объезда, по которому другое транспортное средство D объезжает припаркованное транспортное средство C со стороны боковой дороги и движется по смежной полосе L2 движения, имеет большой поворот по сравнению с маршрутом объезда, по которому другое транспортное средство D объезжает припаркованное транспортное средство C, и, таким образом, маршрут объезда должен быть увеличен в направлении ширины, тогда как длина диапазона укорочена. Поэтому, даже если длина диапазона укорочена, возможно предотвратить то, что рассматриваемое транспортное средство A препятствует движению другого транспортного средства D, посредством расширения ширины диапазона.
[0080] (Четвертый вариант осуществления)
В первом и втором вариантах осуществления был описан способ помощи при движении в случае, когда припаркованное транспортное средство С обнаружено на смежной полосе движения, смежной с полосой движения рассматриваемого транспортного средства А. В способе помощи при движении диапазон X движения устанавливается, даже когда другое транспортное средство D, движущееся сзади к припаркованному транспортному средству C, не обнаружено, но настоящее изобретение не ограничивается этим. В четвертом варианте осуществления будет описано управление помощью при движении в случае, когда фактически обнаружено другое транспортное средство D, движущееся к препятствию на смежной полосе движения.
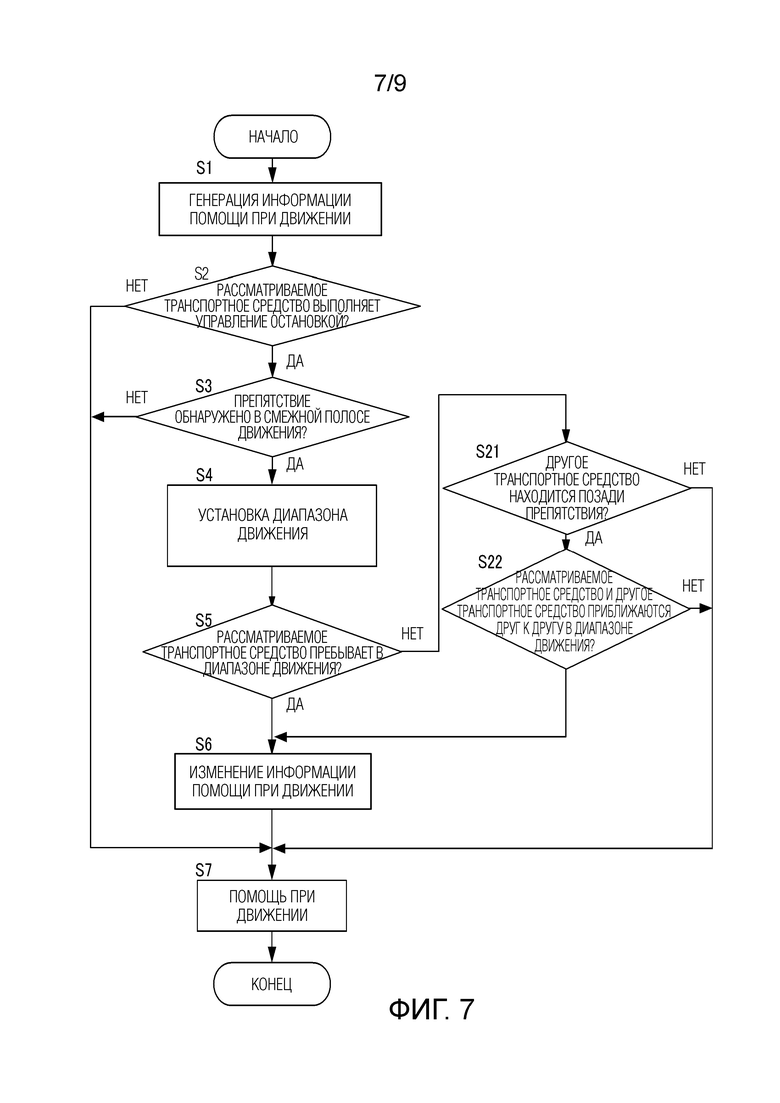
[0081] Фиг. 7 представляет собой блок-схему последовательности операций управления помощью при движении в соответствии с четвертым вариантом осуществления. По сравнению с блок-схемой последовательности операций первого варианта осуществления, показанной на фиг. 3, в блок-схеме последовательности операций, показанной на этой фигуре, дополнительно добавлена обработка этапов S21 и S22 после того, как на этапе S5 не определено, что рассматриваемое транспортное средство A пребывает и останавливается в диапазоне X движения (S5: Нет).
[0082] На этапе S21 контроллер 180 определяет, обнаружено ли другое транспортное средство D, которое фактически движется к препятствию в смежной полосе движения. Когда другое транспортное средство D, движущееся к препятствию, обнаружено позади препятствия (S21: Да), чтобы дополнительно выполнить помощь при движении, соответствующую другому транспортному средству D, затем выполняется обработка этапа S22. С другой стороны, когда другое транспортное средство D, движущееся к препятствию, не обнаружено (S21: Нет), далее выполняется обработка этапа S7.
[0083] На этапе S22 контроллер 180 оценивает маршруты движения рассматриваемого транспортного средства A и другого транспортного средства D и оценивает расстояние между рассматриваемым транспортным средством A и другим транспортным средством D в любое время на основе оцененных маршрутов движения. Затем контроллер 180 определяет, присутствуют ли рассматриваемое транспортное средство A и другое транспортное средство D по существу в одно и то же время в диапазоне X движения и приближаются ли они друг к другу в пределах заданного расстояния. Когда рассматриваемое транспортное средство A и другое транспортное средство D приближаются друг к другу на заданное расстояние в диапазоне X движения (S22: Да), затем выполняется обработка этапа S6, чтобы изменить информацию помощи при движении таким образом, чтобы рассматриваемое транспортное средство A и другое транспортное средство D не приближались друг к другу. С другой стороны, когда рассматриваемое транспортное средство A и другое транспортное средство D не приближаются друг к другу (S22: Нет), далее выполняется обработка этапа S7. Таким образом, тот факт, что рассматриваемое транспортное средство A и другое транспортное средство D приближаются друг к другу в диапазоне X движения, можно назвать «помехой».
[0084] При таком управлении, даже когда другое транспортное средство D, движущееся к препятствию, не обнаружено, предотвращается то, что рассматриваемое транспортное средство A пребывает в диапазоне X движения (S5: Нет). С другой стороны, когда другое транспортное средство D обнаружено (S21: Да), дополнительно предотвращается то, что рассматриваемое транспортное средство A и другое транспортное средство D приближаются друг к другу в диапазоне X движения (S22: Да), и, таким образом, возможно предотвратить то, что рассматриваемое транспортное средство А препятствует движению другого транспортного средства D.
[0085] В настоящем варианте осуществления предполагается, что выполняется управление остановкой (S2: Да), и когда обнаружено другое транспортное средство D (S21: Да), дополнительно определяется, приближаются ли рассматриваемое транспортное средство A и другое транспортное средство D друг к другу в диапазоне X движения (S22), но настоящее изобретение не ограничивается этим. Обработка определения, выполняется ли управление остановкой, показанное на этапе S2, может быть опущена. То есть, даже когда управление остановкой не выполняется и рассматриваемое транспортное средство A и другое транспортное средство D приближаются друг к другу в диапазоне X движения (S22: Да), возможно предотвратить то, что рассматриваемое транспортное средство A препятствует движению другого транспортного средства D, посредством управления, чтобы оба транспортных средства не приближались друг к другу.
[0086] При обработке этапа S6 контроллер 180 (блок 185 определения обстановки) изменяет информацию помощи при движении таким образом, что рассматриваемое транспортное средство A отсутствует в диапазоне X движения в течение заданного времени или более. Здесь, на этапе S22, когда определено, что рассматриваемое транспортное средство A и другое транспортное средство D приближаются друг к другу в диапазоне X движения, возможно предотвратить сближение обоих транспортных средств друг с другом в диапазоне X движения посредством изменения только скорости транспортного средства. Поэтому нет необходимости изменять маршрут движения, и, таким образом, возможно предотвратить появление ускорения в направлении влево-вправо. Обратите внимание, что маршрут движения может быть изменен вместо скорости, или маршрут движения может быть изменен в дополнение к скорости, и, таким образом, предотвращается то, что оба транспортных средства приближаются друг к другу в диапазоне X движения.
[0087] В соответствии с четвертым вариантом осуществления могут быть получены следующие эффекты.
[0088] Согласно способу помощи при движении по четвертому варианту осуществления, когда другое транспортное средство D, движущееся к препятствию, находится позади препятствия, дополнительно определяется, приближаются ли рассматриваемое транспортное средство A и другое транспортное средство D друг к другу на заданное расстояние или менее в диапазоне X движения (S21). Когда оба транспортных средства приближаются друг к другу в пределах заданного расстояния (S21: Да), информация помощи при движении изменяется таким образом, что оба транспортных средства не приближаются друг к другу в пределах заданного расстояния в диапазоне X движения. Таким образом, независимо от присутствия или отсутствия другого транспортного средства D, движущегося к препятствию, возможно предотвратить пребывание рассматриваемого транспортного средства A в диапазоне X движения (S5: Да), и когда другое транспортное средство D фактически движется к препятствию, возможно предотвратить сближение рассматриваемого транспортного средства A и другого транспортного средства D друг с другом, и, таким образом, возможно дополнительно предотвратить то, что рассматриваемое транспортное средство A препятствует другому транспортному средству D.
[0089] Согласно способу помощи при движении по четвертому варианту осуществления, когда информация помощи при движении изменяется таким образом, что рассматриваемое транспортное средство А отсутствует в диапазоне X движения в течение заданного времени или более, возможно предотвратить приближение обоих транспортных средств друг к другу в диапазоне X движения посредством изменения только скорости транспортного средства, и нет необходимости изменять маршрут движения, и, таким образом, можно предотвратить возникновение ускорения в направлении влево-вправо. Изменяя маршрут движения вместо скорости, возможно предотвратить возникновение ускорения в направлении вперед-назад. Изменяя как скорость, так и маршрут движения, возможно улучшить работу по управлению рассматриваемым транспортным средством А, не ограничивая параметры управления для рассматриваемого транспортного средства А.
[0090] (Пятый вариант осуществления)
В вариантах осуществления с первого по четвертый был описан пример, в котором информация помощи при движении изменяется, когда рассматриваемое транспортное средство A пребывает в диапазоне X движения. В пятом варианте осуществления будет подробно описан пример, в котором изменяется маршрут движения или информация о скорости в информации помощи при движении.
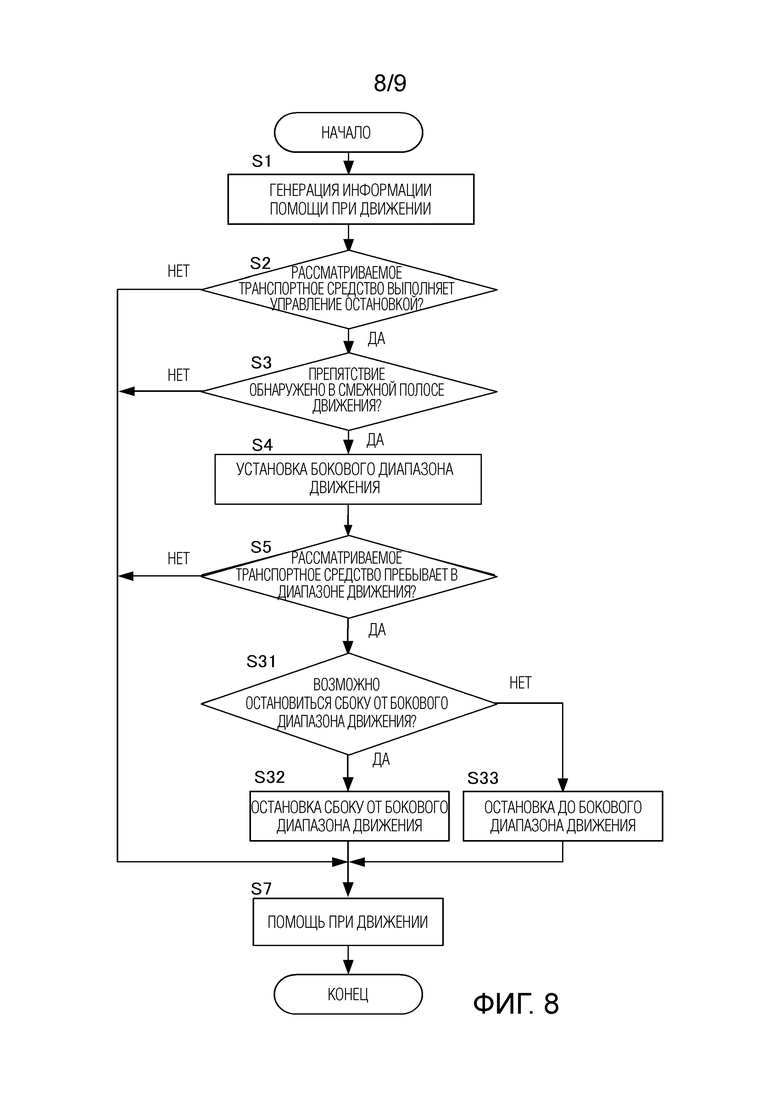
[0091] Фиг. 8 представляет собой блок-схему последовательности операций управления помощью при движении в соответствии с пятым вариантом осуществления. По сравнению с блок-схемой последовательности операций первого варианта осуществления, показанной на фиг. 3, в блок-схеме последовательности операций, показанной на этой фигуре, дополнительно добавлена обработка этапов S31-S33 после того, как на этапе S5 определено, что рассматриваемое транспортное средство A пребывает и останавливается в диапазоне X движения (S5: Да).
[0092] На этапе S31 контроллер 180 дополнительно определяет, может ли рассматриваемое транспортное средство A быть остановлено сбоку от диапазона X движения в полосе L1 движения. Когда рассматриваемое транспортное средство А может быть остановлено сбоку от диапазона движения Х на стороне полосы L1 движения (S31: Да), далее выполняется обработка этапа S32. С другой стороны, когда рассматриваемое транспортное средство А не может быть остановлено сбоку от диапазона движения Х (S31: Нет), далее выполняется обработка этапа S33.
[0093] На этапе S32 контроллер 180 изменяет маршрут движения и информацию о скорости, чтобы остановить рассматриваемое транспортное средство A сбоку от диапазона X движения в полосе L1 движения.
[0094] На этапе S33 контроллер 180 изменяет информацию о скорости, чтобы остановить рассматриваемое транспортное средство A до диапазона X движения без изменения маршрута движения.
[0095] Таким образом, возможно изменить по меньшей мере одно из маршрута движения и информации о скорости в соответствии с диапазоном X движения, занимающим полосу L1 движения. В результате, когда рассматриваемое транспортное средство A останавливается сбоку от диапазона X движения, возможно уменьшить затор в полосе L1 движения. С другой стороны, в случае, когда рассматриваемое транспортное средство A останавливается до диапазона X движения, даже когда ширина полосы L1 движения мала, предотвращается то, что рассматриваемое транспортное средство A препятствует маршруту объезда другого транспортного средства D. Таким образом, поскольку местоположение остановки рассматриваемого транспортного средства А изменяется в соответствии с дорожной обстановкой, возможно увеличить степень свободы управления и уменьшить затор.
[0096] В соответствии с пятым вариантом осуществления могут быть получены следующие эффекты.
[0097] Согласно способу помощи при движении по пятому варианту осуществления, когда рассматриваемое транспортное средство А пребывает в диапазоне X движения (S5: Да), дополнительно определяется, может ли рассматриваемое транспортное средство А остановиться сбоку от диапазона Х движения (S31). Когда рассматриваемое транспортное средство А может остановиться сбоку от диапазона движения Х (S31: Да), маршрут и скорость изменяются таким образом, что рассматриваемое транспортное средство A останавливается сбоку от диапазона X движения (S32). Когда рассматриваемое транспортное средство А может остановиться сбоку от диапазона движения Х (S31: Да), маршрут и скорость изменяются таким образом, что рассматриваемое транспортное средство A останавливается до диапазона X движения (S33).
[0098] Выполняя такое управление, когда рассматриваемое транспортное средство A припарковано до диапазона X движения, рассматриваемое транспортное средство A не препятствует движению другого транспортного средства D в диапазоне X движения. Кроме того, когда рассматриваемое транспортное средство A припарковано сбоку от диапазона X движения (S32) рассматриваемое транспортное средство A расположено дальше вперед и не препятствует движению другого транспортного средства D в диапазоне X движения, и, таким образом, возможно предотвратить возникновение затора в полосе L1 движения. Таким образом, возможно предотвратить то, что рассматриваемое транспортное средство А препятствует движению другого транспортного средства D в соответствии с состоянием дороги.
[0099] (Шестой вариант осуществления)
В вариантах осуществления с первого по пятый описан пример, в котором информация помощи при движении рассматриваемого транспортного средства A изменяется, когда обнаруживается препятствие в смежной полосе движения. В шестом варианте осуществления будет описан пример, в котором информация помощи при движении рассматриваемого транспортного средства А не изменяется.
[0100] Фиг. 9 представляет собой схему, иллюстрирующую обстановку вокруг рассматриваемого транспортного средства А в случае, когда выполняется управление помощью при движении согласно шестому варианту осуществления. На этой фигуре, аналогично примеру второго варианта осуществления, показанному на фиг. 4, обеспечены полоса L1 движения, продолжающаяся от нижней стороны к верхней стороне на фигуре, и полоса L2 движения, продолжающаяся от верхней стороны к нижней стороне на фигуре. В настоящем варианте осуществления предполагается, что между полосой L1 движения и полосой L2 движения дополнительно предусмотрена разделительная полоса F.
[0101] Другое транспортное средство D движется по маршруту объезда припаркованного транспортного средства C, но маршрут объезда не входит в полосу L1 движения рассматриваемого транспортного средства A, поскольку предусмотрена разделительная полоса F. Поэтому, даже если рассматриваемое транспортное средство A припарковано сбоку от припаркованного транспортного средства C через разделительную полосу F, рассматриваемое транспортное средство A не препятствует движению другого транспортного средства D.
[0102] Согласно способу управления шестого варианта осуществления, вычислительная нагрузка управления помощью при движении может быть уменьшена посредством изменения информации помощи при движении только тогда, когда разделительная полоса F не обнаружена блоком 183 получения информации о транспортном средстве в окрестности, другими словами, только когда разделительная полоса F не обнаружена.
[0103] Хотя варианты осуществления настоящего изобретения были описаны выше, приведенные выше варианты осуществления являются просто частью примеров применения настоящего изобретения и не предназначены для ограничения технического объема настоящего изобретения конкретными конфигурациями вышеприведенных вариантов осуществления.
[0104] Каждый из вариантов осуществления, описанных выше, был описан как отдельный вариант осуществления, но может быть надлежащим образом объединен.







Группа изобретений относится к способу помощи при движении. Устройство помощи при движении содержит контроллер, выполненный с возможностью обнаружения препятствия на смежной полосе движения полосы движения, по которой движется рассматриваемое транспортное средство, установки диапазона движения сбоку от препятствия со стороны рассматриваемого транспортного средства, когда препятствие обнаружено, установки по меньшей мере одного из маршрута и скорости транспортного средства таким образом, чтобы рассматриваемое транспортное средство не препятствовало движению другого транспортного средства, движущегося по смежной полосе движения к препятствию в диапазоне движения, и выполнения помощи при движении с использованием установленных маршрута и/или скорости транспортного средства. Достигается выполнение помощи при движении с учетом препятствия, когда препятствие присутствует на смежной полосе рассматриваемого транспортного средства. 6 н. и 8 з.п. ф-лы, 9 ил.
1. Способ помощи при движении, содержащий этапы, на которых:
обнаруживают препятствие на смежной полосе движения полосы движения, по которой движется рассматриваемое транспортное средство;
устанавливают диапазон движения сбоку от препятствия со стороны рассматриваемого транспортного средства, когда препятствие обнаружено;
устанавливают по меньшей мере одно из маршрута и скорости транспортного средства таким образом, чтобы рассматриваемое транспортное средство не препятствовало движению другого транспортного средства, движущегося по смежной полосе движения к препятствию в диапазоне движения; и
выполняют помощь при движении с использованием установленных маршрута и/или скорости транспортного средства, при этом
упомянутый способ содержит этапы, на которых:
определяют, выполняет ли рассматриваемое транспортное средство управление остановкой в направлении диапазона движения;
обнаруживают присутствие или отсутствие разделительной полосы между полосой движения рассматриваемого транспортного средства и смежной полосой движения, на которой обнаружено препятствие; и
устанавливают маршрут и/или скорость транспортного средства таким образом, чтобы рассматриваемое транспортное средство останавливалось сбоку от диапазона движения, или таким образом, чтобы рассматриваемое транспортное средство останавливалось до или впереди диапазона движения, когда рассматриваемое транспортное средство выполняет управление остановкой,
при этом маршрут и скорость транспортного средства устанавливают, только когда разделительная полоса не обнаружена.
2. Способ помощи при движении по п. 1, дополнительно содержащий этапы, на которых:
устанавливают маршрут и скорость транспортного средства таким образом, чтобы рассматриваемое транспортное средство не останавливалось в диапазоне движения, когда рассматриваемое транспортное средство выполняет управление замедлением в направлении диапазона движения; и
выполняют помощь при движении с использованием установленных маршрута и скорости транспортного средства.
3. Способ помощи при движении по п. 2, дополнительно содержащий этапы, на которых:
определяют, может ли рассматриваемое транспортное средство остановиться сбоку от диапазона движения в полосе движения, когда рассматриваемое транспортное средство останавливается после замедления;
устанавливают маршрут и скорость транспортного средства таким образом, чтобы рассматриваемое транспортное средство останавливалось сбоку от диапазона движения, когда рассматриваемое транспортное средство может остановиться сбоку от диапазона движения; и
устанавливают маршрут и скорость транспортного средства таким образом, чтобы рассматриваемое транспортное средство останавливалось до или впереди диапазона движения, когда рассматриваемое транспортное средство не может остановиться сбоку от диапазона движения.
4. Способ помощи при движении по п. 1, дополнительно содержащий этапы, на которых:
определяют, приближаются ли друг к другу рассматриваемое транспортное средство и другое транспортное средство на пороговое расстояние или меньше в направлении ширины транспортного средства в диапазоне движения, когда обнаружено другое транспортное средство, движущееся по смежной полосе движения в направлении препятствия; и
устанавливают скорость транспортного средства таким образом, чтобы рассматриваемое транспортное средство и другое транспортное средство не приближались друг к другу на пороговое расстояние или меньше, когда рассматриваемое транспортное средство и другое транспортное средство приближаются друг к другу на пороговое расстояние или меньше.
5. Способ помощи при движении по п. 4, дополнительно содержащий этапы, на которых:
устанавливают маршрут в дополнение к скорости транспортного средства таким образом, чтобы рассматриваемое транспортное средство и другое транспортное средство не приближались друг к другу на пороговое расстояние или меньше, когда рассматриваемое транспортное средство и другое транспортное средство приближаются друг к другу на пороговое расстояние или меньше.
6. Способ помощи при движении по любому из пп. 1-5, в котором
диапазон движения устанавливают тем большим, чем выше скорость другого транспортного средства.
7. Способ помощи при движении по любому из пп. 1-6, в котором
ширину диапазона для диапазона движения в направлении ширины транспортного средства устанавливают тем меньшей, чем меньше ширины транспортных средств полосы движения и смежной полосы движения.
8. Способ помощи при движении по любому из пп. 1-7, в котором
диапазон движения устанавливают тем больший, чем больше препятствие.
9. Способ помощи при движении по любому из пп. 1-8, в котором
смежная полоса движения пересекается с боковой дорогой, и длину диапазона для диапазона движения в направлении вперед-назад устанавливают тем большей, и ширину диапазона для диапазона движения в направлении ширины транспортного средства устанавливают тем меньшей, чем меньше расстояние от препятствия до боковой дороги.
10. Способ помощи при движении, содержащий этапы, на которых:
обнаруживают препятствие на смежной полосе движения полосы движения, по которой движется рассматриваемое транспортное средство;
устанавливают диапазон движения сбоку от препятствия со стороны рассматриваемого транспортного средства, когда препятствие обнаружено;
устанавливают по меньшей мере одно из маршрута и скорости транспортного средства таким образом, чтобы рассматриваемое транспортное средство не препятствовало движению другого транспортного средства, движущегося по смежной полосе движения к препятствию в диапазоне движения; и
выполняют помощь при движении с использованием установленных маршрута и/или скорости транспортного средства, при этом
упомянутый способ содержит этапы, на которых:
определяют, выполняет ли рассматриваемое транспортное средство управление остановкой в направлении диапазона движения;
определяют, приближаются ли друг к другу рассматриваемое транспортное средство и другое транспортное средство на пороговое расстояние или меньше в направлении ширины транспортного средства в диапазоне движения, когда обнаружено другое транспортное средство, движущееся по смежной полосе движения в направлении препятствия;
устанавливают маршрут и/или скорость транспортного средства таким образом, чтобы рассматриваемое транспортное средство останавливалось сбоку от диапазона движения, или таким образом, чтобы рассматриваемое транспортное средство останавливалось до или впереди диапазона движения, когда рассматриваемое транспортное средство выполняет управление остановкой, при этом
скорость транспортного средства устанавливают таким образом, чтобы рассматриваемое транспортное средство и другое транспортное средство не приближались друг к другу на пороговое расстояние или меньше, когда рассматриваемое транспортное средство и другое транспортное средство приближаются друг к другу на пороговое расстояние или меньше; и
маршрут в дополнение к скорости транспортного средства устанавливают таким образом, чтобы рассматриваемое транспортное средство и другое транспортное средство не приближались друг к другу на пороговое расстояние или меньше, когда рассматриваемое транспортное средство и другое транспортное средство приближаются друг к другу на пороговое расстояние или меньше.
11. Способ помощи при движении, содержащий этапы, на которых:
обнаруживают препятствие на смежной полосе движения полосы движения, по которой движется рассматриваемое транспортное средство;
устанавливают диапазон движения сбоку от препятствия со стороны рассматриваемого транспортного средства, когда препятствие обнаружено;
устанавливают по меньшей мере одно из маршрута и скорости транспортного средства таким образом, чтобы рассматриваемое транспортное средство не препятствовало движению другого транспортного средства, движущегося по смежной полосе движения к препятствию в диапазоне движения; и
выполняют помощь при движении с использованием установленных маршрута и/или скорости транспортного средства, при этом
упомянутый способ содержит этапы, на которых:
определяют, выполняет ли рассматриваемое транспортное средство управление остановкой в направлении диапазона движения; и
устанавливают маршрут и/или скорость транспортного средства таким образом, чтобы рассматриваемое транспортное средство останавливалось сбоку от диапазона движения, или таким образом, чтобы рассматриваемое транспортное средство останавливалось до или впереди диапазона движения, когда рассматриваемое транспортное средство выполняет управление остановкой,
при этом смежная полоса движения пересекается с боковой дорогой, и
длину диапазона для диапазона движения в направлении вперед-назад устанавливают тем большей, и ширину диапазона для диапазона движения в направлении ширины транспортного средства устанавливают тем меньшей, чем меньше расстояние от препятствия до боковой дороги.
12. Устройство помощи при движении, содержащее:
контроллер, выполненный с возможностью:
обнаружения препятствия на смежной полосе движения полосы движения, по которой движется рассматриваемое транспортное средство;
установки диапазона движения сбоку от препятствия со стороны рассматриваемого транспортного средства, когда препятствие обнаружено;
установки по меньшей мере одного из маршрута и скорости транспортного средства таким образом, чтобы рассматриваемое транспортное средство не препятствовало движению другого транспортного средства, движущегося по смежной полосе движения к препятствию в диапазоне движения; и
выполнения помощи при движении с использованием установленных маршрута и/или скорости транспортного средства, при этом
контроллер дополнительно выполнен с возможностью:
определения, выполняет ли рассматриваемое транспортное средство управление остановкой в направлении диапазона движения;
обнаружения присутствия или отсутствия разделительной полосы между полосой движения рассматриваемого транспортного средства и смежной полосой движения, на которой обнаружено препятствие; и
установки маршрута и/или скорости транспортного средства таким образом, чтобы рассматриваемое транспортное средство останавливалось сбоку от диапазона движения, или таким образом, чтобы рассматриваемое транспортное средство останавливалось до или впереди диапазона движения, когда рассматриваемое транспортное средство выполняет управление остановкой,
при этом маршрут и скорость транспортного средства устанавливаются, только когда разделительная полоса не обнаружена.
13. Устройство помощи при движении, содержащее: контроллер, выполненный с возможностью:
обнаружения препятствия на смежной полосе движения полосы движения, по которой движется рассматриваемое транспортное средство;
установки диапазона движения сбоку от препятствия со стороны рассматриваемого транспортного средства, когда препятствие обнаружено;
установки по меньшей мере одного из маршрута и скорости транспортного средства таким образом, чтобы рассматриваемое транспортное средство не препятствовало движению другого транспортного средства, движущегося по смежной полосе движения к препятствию в диапазоне движения; и
выполнения помощи при движении с использованием установленных маршрута и/или скорости транспортного средства, при этом
контроллер дополнительно выполнен с возможностью:
определения, выполняет ли рассматриваемое транспортное средство управление остановкой в направлении диапазона движения;
определения, приближаются ли друг к другу рассматриваемое транспортное средство и другое транспортное средство на пороговое расстояние или меньше в направлении ширины транспортного средства в диапазоне движения, когда обнаружено другое транспортное средство, движущееся по смежной полосе движения в направлении препятствия; и
установки маршрута и/или скорости транспортного средства таким образом, чтобы рассматриваемое транспортное средство останавливалось сбоку от диапазона движения, или таким образом, чтобы рассматриваемое транспортное средство останавливалось до или впереди диапазона движения, когда рассматриваемое транспортное средство выполняет управление остановкой, при этом
скорость транспортного средства устанавливается таким образом, чтобы рассматриваемое транспортное средство и другое транспортное средство не приближались друг к другу на пороговое расстояние или меньше, когда рассматриваемое транспортное средство и другое транспортное средство приближаются друг к другу на пороговое расстояние или меньше; и
маршрут в дополнение к скорости транспортного средства устанавливается таким образом, чтобы рассматриваемое транспортное средство и другое транспортное средство не приближались друг к другу на пороговое расстояние или меньше, когда рассматриваемое транспортное средство и другое транспортное средство приближаются друг к другу на пороговое расстояние или меньше.
14. Устройство помощи при движении, содержащее:
контроллер, выполненный с возможностью:
обнаружения препятствия на смежной полосе движения полосы движения, по которой движется рассматриваемое транспортное средство;
установки диапазона движения сбоку от препятствия со стороны рассматриваемого транспортного средства, когда препятствие обнаружено;
установки по меньшей мере одного из маршрута и скорости транспортного средства таким образом, чтобы рассматриваемое транспортное средство не препятствовало движению другого транспортного средства, движущегося по смежной полосе движения к препятствию в диапазоне движения; и
выполнения помощи при движении с использованием установленных маршрута и/или скорости транспортного средства, при этом
контроллер дополнительно выполнен с возможностью: определения, выполняет ли рассматриваемое транспортное
средство управление остановкой в направлении диапазона движения; и
установки маршрута и/или скорости транспортного средства таким образом, чтобы рассматриваемое транспортное средство останавливалось сбоку от диапазона движения, или таким образом, чтобы рассматриваемое транспортное средство останавливалось до или впереди диапазона движения, когда рассматриваемое транспортное средство выполняет управление остановкой,
при этом смежная полоса движения пересекается с боковой дорогой, и
длина диапазона для диапазона движения в направлении вперед-назад устанавливается тем большей, и ширина диапазона для диапазона движения в направлении ширины транспортного средства устанавливается тем меньшей, чем меньше расстояние от препятствия до боковой дороги.
| US 2019283752 A1, 19.09.2019 | |||
| EP 3162648 A1, 03.05.2017 | |||
| US 2015039156 A1, 05.02.2015 | |||
| US 2020079371 A1, 12.03.2020 | |||
| СИСТЕМА ПОМОЩИ ПРИ ВОЖДЕНИИ | 2018 |
|
RU2694878C1 |
