Область техники, к которой относится изобретение
[0001]
Настоящее изобретение относится к способу помощи при вождении и устройству помощи при вождении.
Уровень техники
[0002]
Технология, раскрытая в PTL 1, известна как технология остановки рассматриваемого транспортного средства в ответ на препятствие впереди рассматриваемого транспортного средства. Устройство управления движением транспортного средства, раскрытое в PTL 1, устанавливает положение остановки рассматриваемого транспортного средства в соответствии с положением припаркованного транспортного средства перед рассматриваемым транспортным средством, чтобы облегчить движение при обгоне после остановки в положении остановки.
СПИСОК ЦИТАТ
Патентная литература
[0003]
PTL 1: JP 2016-112911 A
Сущность изобретения
Техническая проблема
[0004]
Однако в устройстве управления движением транспортного средства, раскрытом в PTL 1, когда есть препятствие как на полосе движения рассматриваемого транспортного средства, так и на встречной полосе движения, остановившееся рассматриваемое транспортное средство и препятствие на встречной полосе движения могут препятствовать движению встречного транспортного средства.
Задача настоящего изобретения состоит в том, чтобы предотвратить препятствование рассматриваемого транспортного средства, остановленного в ответ на препятствие впереди рассматриваемого транспортного средства и препятствие на встречной полосе движения, движению встречного транспортного средства.
РЕШЕНИЕ ПРОБЛЕМЫ
[0005]
Согласно аспекту настоящего изобретения предоставляется способ помощи при вождении, включающий в себя: обнаружение положения первого препятствия впереди рассматриваемого транспортного средства на первой полосе движения, по которой движется рассматриваемое транспортное средство; обнаружение положения второго препятствия впереди рассматриваемого транспортного средства на второй полосе движения, причем вторая полоса движения является встречной полосой движения, смежной с первой полосой движения; когда положение второго препятствия находится на более близкой стороне, чем положение первого препятствия в направлении движения рассматриваемого транспортного средства, определение первого положения остановки в качестве положения остановки рассматриваемого транспортного средства как положения перед вторым препятствием в направлении движения рассматриваемого транспортного средства; и помощь рассматриваемому транспортному средству в остановке в определенном первом положении остановки.
ПОЛОЖИТЕЛЬНЫЕ ЭФФЕКТЫ ИЗОБРЕТЕНИЯ
[0006]
Согласно аспекту настоящего изобретения можно предотвратить препятствование рассматриваемого транспортного средства, остановленного в ответ на препятствие впереди рассматриваемого транспортного средства и препятствие на встречной полосе движения, движению встречного транспортного средства.
Цель и преимущества изобретения будут реализованы и достигнуты с помощью элементов и комбинаций, конкретно указанных в формуле изобретения. Следует понимать, что как предшествующее общее описание, так и последующее подробное описание являются иллюстративными и пояснительными и не ограничивают изобретение.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0007]
Фиг. 1 - блок-схема, иллюстрирующая пример устройства помощи при вождении согласно первому варианту осуществления;
Фиг. 2A - схематическая диаграмма, иллюстрирующая пример сцены вождения, где применяется устройство помощи при вождении согласно первому варианту осуществления;
Фиг. 2B - схематическая диаграмма, иллюстрирующая пример сцены вождения, где применяется устройство помощи при вождении согласно первому варианту осуществления;
Фиг. 3 - блок-схема, иллюстрирующая пример контроллера согласно первому варианту осуществления;
Фиг. 4 - иллюстративная схема области движения встречного транспортного средства;
Фиг. 5А - иллюстративная диаграмма первого примера случая, когда положение остановки определяется относительно продольного положения препятствия на полосе движения, по которой движется рассматриваемое транспортное средство;
Фиг. 5B - иллюстративная диаграмма второго примера случая, когда положение остановки определяется относительно продольного положения препятствия на полосе движения, по которой движется рассматриваемое транспортное средство;
Фиг. 6 - блок-схема последовательности операций, иллюстрирующая пример способа помощи при вождении согласно первому варианту осуществления;
Фиг. 7 - схематическая диаграмма, иллюстрирующая пример сцены вождения, в которой применяется устройство помощи при вождении согласно второму варианту осуществления;
Фиг. 8 - блок-схема последовательности операций, иллюстрирующая пример способа помощи при вождении согласно второму варианту осуществления;
Фиг. 9 - схематическая диаграмма, иллюстрирующая пример сцены вождения, где применяется устройство помощи при вождении согласно третьему варианту осуществления; а также
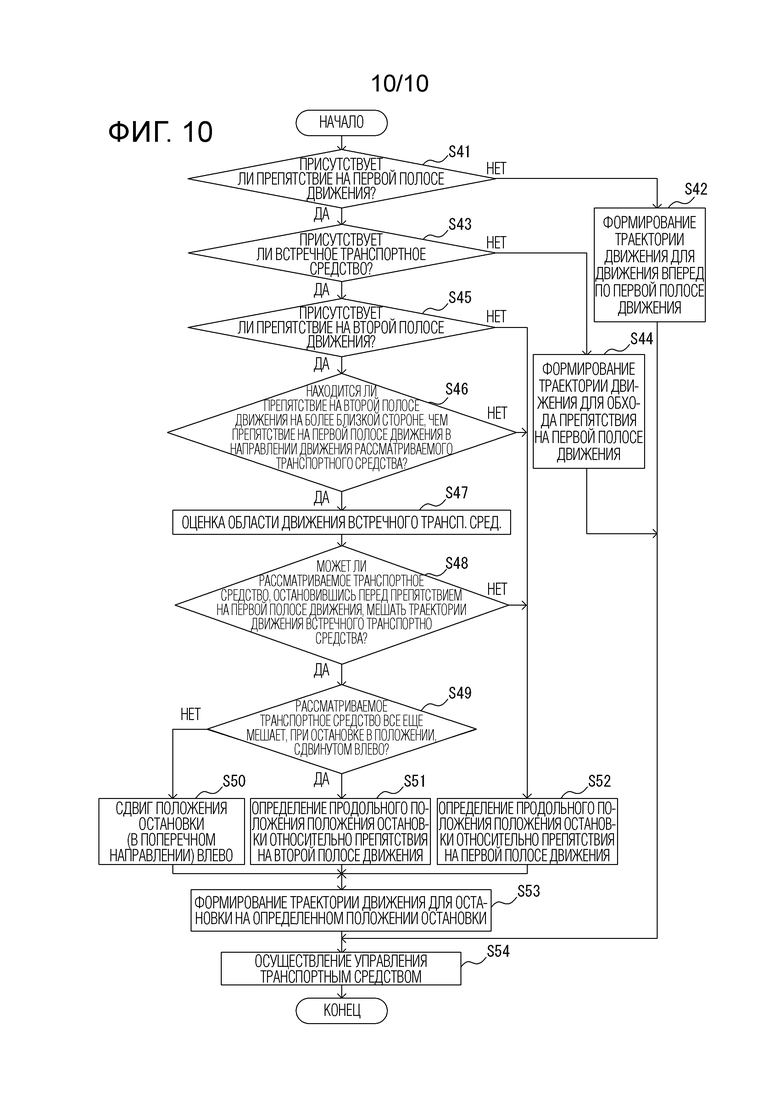
Фиг. 10 - блок-схема последовательности операций, иллюстрирующая пример способа помощи при вождении согласно третьему варианту осуществления.
Описание вариантов осуществления
[0008]
Далее со ссылкой на чертежи будут описаны варианты осуществления настоящего изобретения с первого по третий. В нижеследующем описании чертежей одинаковые или подобные части обозначены одинаковыми или подобными ссылочными позициями. Однако рисунки схематичны. Технологическая идея настоящего изобретения может быть по-разному модифицирована в пределах технологического объема, определенного в прилагаемой формуле изобретения.
[0009]
Первый вариант осуществления)
(Устройство помощи при вождении)
Устройство помощи при вождении согласно первому варианту осуществления, например, установлено в транспортном средстве (в дальнейшем транспортное средство, установленное с устройством помощи при вождении согласно варианту осуществления, упоминается как «рассматриваемое транспортное средство»). Устройство помощи при вождении согласно первому варианту осуществления может выполнять в качестве помощи при вождении автоматическое вождение для автоматического вождения, так что рассматриваемое транспортное средство движется по маршруту движения, и указания для подсказки водителю двигаться, чтобы рассматриваемое транспортное средство двигалось по маршруту движения.
[0010]
Автоматическое вождение включает в себя случаи, когда все элементы управления движением, торможением и рулевым управлением рассматриваемого транспортного средства выполняются без участия водителя транспортного средства, а также случаи, когда выполняется по крайней мере одно управление движением или торможением рассматриваемого транспортного средства. Автоматическое вождение может быть управлением следованием за предшествующим транспортным средством, управлению расстоянием между транспортными средствами и т.п.
[0011]
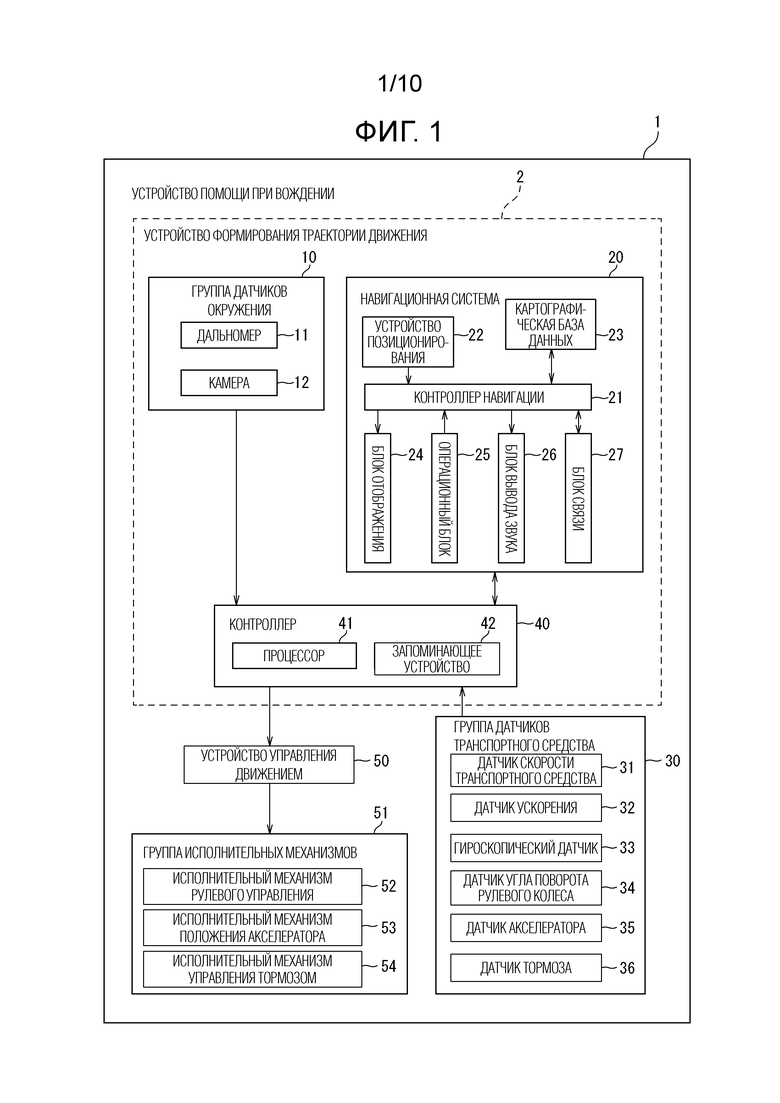
Как показано на фиг. 1, устройство 1 помощи при вождении согласно первому варианту осуществления включает в себя группу 10 датчиков окружения, навигационную систему 20, группу 30 датчиков транспортного средства, контроллер 40, устройство 50 управления движением и группу 51 исполнительных механизмов.
[0012]
Группа 10 датчиков окружения представляет собой группу датчиков, выполненную с возможностью обнаружения окружения рассматриваемого транспортного средства, например, объектов вокруг рассматриваемого транспортного средства. Группа 10 датчиков окружения обнаруживает, например, препятствия впереди рассматриваемого транспортного средства на полосе движения рассматриваемого транспортного средства и встречной полосе движения. Группа 10 датчиков окружения может включать дальномер 11 и камеру 12. Дальномер 11 и камера 12 обнаруживают окружение рассматриваемого транспортного средства, включая объекты, присутствующие вокруг рассматриваемого транспортного средства, относительные положения между рассматриваемым транспортным средством и объектами и расстояния между рассматриваемым транспортным средством и объектами.
[0013]
Дальномер 11 может быть, например, лазерным дальномером (LRF) или радаром. Камера 12 может быть, например, стереокамерой. Камера 12 может быть монокулярной камерой, с помощью которой один и тот же объект может быть отображен из множества точек обзора для вычисления расстояния до объекта. В качестве альтернативы, расстояние до объекта может быть вычислено на основе положения контакта с землей объекта, обнаруженного из захваченного изображения. Дальномер 11 и камера 12 выводят информацию об окружении, которая является информацией об обнаруженном окружении, на контроллер 40.
[0014]
Навигационная система 20 распознает текущее положение рассматриваемого транспортного средства и информацию о карте дороги в текущем положении. Навигационная система 20 устанавливает маршрут движения к пункту назначения, введенному водителем транспортного средства, и дает руководство по маршруту водителю транспортного средства в соответствии с маршрутом движения. Навигационная система 20 выводит информацию об установленном маршруте движения в контроллер 40. Когда состояние движения рассматриваемого транспортного средства находится в автоматическом режиме движения, контроллер 40 автоматически приводит в движение рассматриваемое транспортное средство, чтобы двигаться по маршруту движения, установленному навигационной системой 20.
[0015]
Навигационная система 20 включает в себя контроллер 21 навигации, устройство 22 позиционирования, картографическую базу 23 данных (DB), блок 24 отображения, операционный блок 25, блок 26 вывода звука и блок 27 связи. Контроллер 21 навигации представляет собой электронный блок управления (ЭБУ, англ. ECU, electronic control unit), выполненный с возможностью управления операцией обработки информации навигационной системы 20. Контроллер 21 навигации включает в себя процессор и его периферийные компоненты. Процессором может быть, например, центральный процессор (CPU) или микропроцессор (MPU). Периферийные компоненты включают в себя запоминающее устройство и т.п. Запоминающее устройство может включать в себя любое из полупроводникового запоминающего устройства, магнитного запоминающего устройства и оптического запоминающего устройства. Запоминающее устройство может включать в себя запоминающие устройства, такие как регистр, кэш-память, постоянное запоминающее устройство (ПЗУ) и оперативное запоминающее устройство (ОЗУ), используемые в качестве первичных запоминающих устройств.
[0016]
Устройство 22 позиционирования измеряет текущее положение рассматриваемого транспортного средства. Устройство 22 позиционирования может быть, например, приемником глобальной системы позиционирования (GPS). Кроме того, устройство 22 позиционирования может измерять текущее положение рассматриваемого транспортного средства на основе спутникового сигнала другой спутниковой системы позиционирования, такой как глобальная навигационная спутниковая система (ГЛОНАСС). В качестве альтернативы устройство 22 позиционирования может быть инерциальным навигационным устройством.
[0017]
В картографической базе 23 данных хранятся данные карты дорог. Данные карты дорог включают информацию о типах линий дорог, формах дорог, уклонах, количестве полос движения, разрешенных скоростях (ограничениях скорости), ширине дорог, правилах приоритета для обозначения приоритетных дорог, правилах остановок для обозначения временной остановки и т. д., А также наличие или отсутствие стыков. К типам дорог относятся, например, дороги общего пользования и автомагистрали.
[0018]
Блок 24 отображения выводит различную визуальную информацию в навигационную систему 20. Например, блок 24 отображения может отображать экран карты вокруг рассматриваемого транспортного средства и указания по рекомендованному маршруту. Операционный блок 25 получает управление от водителя транспортного средства в навигационной системе 20. Операционный блок 25 может быть, например, кнопкой, диском, ползунком и т.п., или может быть сенсорной панелью, предусмотренной на блоке 24 отображения. Например, операционный блок 25 может принимать операцию для ввода пункта назначения и операцию для переключения экрана дисплея блока 24 отображения водителем транспортного средства.
[0019]
Блок 26 вывода звука выводит различные фрагменты звуковой информации в навигационную систему 20. Блок 26 вывода звука может выводить руководство по вождению на основе установленного маршрута движения и информацию о руководстве по дороге на основе данных карты дорог вокруг рассматриваемого транспортного средства. Блок 27 связи выполняет беспроводную связь с устройством связи за пределами рассматриваемого транспортного средства. Система связи посредством блока 27 связи может быть, например, беспроводной связью через сеть мобильной связи общего пользования, связью между транспортными средствами (vehicle-to-vehicle), связью между дорогой и транспортным средством (road-to-vehicle) или спутниковой связью. Навигационная система 20 может получать данные карты дорог от внешнего устройства через блок 27 связи.
[0020]
Группа 30 датчиков транспортного средства включает в себя датчики, выполненные с возможностью обнаружения состояния движения рассматриваемого транспортного средства, и датчики, выполненные с возможностью обнаружения операций вождения, выполняемых водителем. Датчики, выполненные с возможностью обнаружения состояния движения рассматриваемого транспортного средства, включают в себя датчик 31 скорости транспортного средства, датчик 32 ускорения и гироскопический датчик 33. Датчик 31 скорости транспортного средства обнаруживает скорость колеса рассматриваемого транспортного средства и вычисляет скорость рассматриваемого транспортного средства на основе скорости колес. Датчик 32 ускорения обнаруживает ускорение в продольном направлении рассматриваемого транспортного средства, ускорение в его поперечном направлении транспортного средства и ускорение в его вертикальном направлении. Гироскопический датчик 33 обнаруживает угловую скорость угла поворота рассматриваемого транспортного средства вокруг трех осей, включая ось крена, ось тангажа и ось рыскания.
[0021]
Датчики, выполненные с возможностью обнаружения операций вождения, включают в себя датчик 34 угла поворота рулевого колеса, датчик 35 акселератора и датчик 36 тормоза. Датчик 34 угла поворота рулевого колеса определяет текущий угол поворота рулевого колеса, который является текущим углом поворота (величиной операции рулевого управления) рулевого колеса, служащего элементом рулевого управления. Датчик 35 акселератора определяет положение акселератора рассматриваемого транспортного средства. Например, датчик 35 акселератора определяет в качестве положения акселератора величину нажатия педали акселератора рассматриваемого транспортного средства. Датчик 36 тормоза определяет, насколько водитель тормозит. Например, датчик 36 тормоза определяет в качестве величины срабатывания тормоза величину нажатия педали тормоза рассматриваемого транспортного средства.
[0022]
Информация о скорости, ускорении, угловой скорости, угле поворота рулевого колеса, положении акселератора и величине срабатывания тормоза рассматриваемого транспортного средства, обнаруженная соответствующими датчиками группы 30 датчиков транспортного средства, в совокупности называется «информацией транспортного средства». Группа 30 датчиков транспортного средства выводит информацию транспортном средстве на контроллер 40.
[0023]
Контроллер 40 - это ЭБУ, выполненный с возможностью оказания помощи при вождении для рассматриваемого транспортного средства. Контроллер 40 включает в себя процессор 41 и периферийные компоненты, такие как запоминающее устройство 42. Процессор 41 может быть, например, CPU или MPU. Запоминающее устройство 42 может включать в себя любое из полупроводникового запоминающего устройства, магнитного запоминающего устройства и оптического запоминающего устройства. Запоминающее устройство 42 может включать в себя запоминающие устройства, такие как регистр, кэш-память, а также ПЗУ и ОЗУ, используемые в качестве первичных запоминающих устройств. Отметим, что контроллер 40 может быть воплощен в виде функциональной логической схемы, установленной в полупроводниковой интегральной схеме общего назначения. Например, контроллер 40 может включать в себя программируемое логическое устройство (PLD), такое как программируемая вентильная матрица (FPGA) или подобное.
[0024]
Контроллер 40 формирует траекторию движения, которая позволяет рассматриваемому транспортному средству двигаться по маршруту движения, установленному навигационной системой 20, на основе информации об окружении, вводимой из группы 10 датчиков окружения, и информации транспортного средства, вводимой из группы датчиков транспортного средства 30. Контроллер 40 выводит сформированную траекторию движения на устройство 50 управления движением. Группа 10 датчиков окружения, навигационная система 20, группа 30 датчиков транспортного средства и контроллер 40 вместе могут образовывать устройство 2 формирования траектории движения, выполненное с возможностью создания траектории движения, которая позволяет рассматриваемому транспортному средству двигаться.
[0025]
Устройство 50 управления движением является ЭБУ, выполненным с возможностью управления движением рассматриваемого транспортного средства. Устройство 50 управления движением включает в себя процессор и периферийные компоненты, такие как запоминающее устройство. Процессор может быть, например, CPU или MPU. Запоминающее устройство может включать в себя любое из полупроводникового запоминающего устройства, магнитного запоминающего устройства и оптического запоминающего устройства. Запоминающее устройство может включать в себя запоминающие устройства, такие как регистр, кэш-память, а также ПЗУ и ОЗУ, используемые в качестве первичных запоминающих устройств.
[0026]
Отметим, что устройство 50 управления движением может быть воплощено в виде функциональной логической схемы, установленной в полупроводниковой интегральной схеме общего назначения. Например, устройство 50 управления движением может включать в себя PLD, такой как FPGA, и т.п. Устройство 50 управления движением может быть либо электронным блоком управления, интегрированным с контроллером 40, либо отдельным электронным блоком управления. Устройство 50 управления движением приводит в действие группу 51 исполнительных механизмов, позволяя рассматриваемому транспортному средству автоматически перемещаться, так что рассматриваемое транспортное средство движется по траектории движения, сформированной контроллером 40.
[0027]
Группа 51 исполнительных механизмов управляет рулевым колесом, положением акселератора и тормозным устройством рассматриваемого транспортного средства в ответ на управляющий сигнал от контроллера 40, чтобы вызвать поведение транспортного средства рассматриваемого транспортного средства. Группа 51 исполнительных механизмов включает исполнительный механизм 52 рулевого управления, исполнительный механизм 53 положения акселератора и исполнительный механизм 54 управления тормозом. Исполнительный механизм 52 рулевого управления управляет направлением поворота и величиной поворота рулевого колеса рассматриваемого транспортного средства. Исполнительный механизм 53 положения акселератора управляет положением педали акселератора рассматриваемого транспортного средства. Исполнительный механизм 54 управления тормозом управляет работой тормозного устройства рассматриваемого транспортного средства.
[0028]
Далее со ссылкой на фиг. 2A и 2B будет дано описание сцены вождения, в которой применяется устройство 1 помощи при вождении согласно первому варианту осуществления. На дороге с одной полосой движения (с каждой стороны) есть препятствие (в дальнейшем может упоминаться как «первое препятствие») 61 впереди рассматриваемого транспортного средства 60 на первой полосе L1 движения (полоса движения рассматриваемого транспортного средства), по которой движется рассматриваемое транспортное средство 60.
[0029]
Кроме того, встречное транспортное средство 64 движется по второй полосе движения L2, которая является смежной полосой движения (встречной полосой движения), смежной с первой полосой движения L1, и приближается к рассматриваемому транспортному средству 60. Штрих-пунктирная линия 65 указывает прогнозируемую траекторию, по которой может пройти правый конец встречного транспортного средства 64, а штрих-пунктирная линия 66 указывает прогнозируемую траекторию, по которой может пройти левый конец встречного транспортного средства 64. Область, окруженная предсказанными траекториями 65 и 66, является областью, через которую может пройти весь корпус движущегося встречного транспортного средства 64, и эта область в дальнейшем упоминается как «область движения».
[0030]
Как показано на фиг. 2A, когда встречное транспортное средство 64 приближается, рассматриваемое транспортное средство 60 не может избежать первого препятствия 61 за граничной линией полосы движения (центральной линией) и, следовательно, должно остановиться и дождаться завершения проезда между рассматриваемым транспортным средством 60 и встречным транспортным средством. 64.
В такой ситуации, когда есть препятствие (в дальнейшем может упоминаться как «второе препятствие») 62 на более близкой стороне, чем первое препятствие 61 (на нижней стороне на фиг. 2A и 2B) в направлении движения рассматриваемого транспортного средства (в направлении движения по первой полосе L1 движения) на второй полосе L2 движения, рассматриваемое транспортное средство 60 остановилось в положении 63 перед первым препятствием 61 сможет помешать области движения встречное транспортное средство 64, которое избегает второе препятствие 62. В результате движение встречного транспортного средства 64 может быть затруднено.
[0031]
В связи с этим, как показано на фиг. 2B, когда встречное транспортное средство 64 приближается к рассматриваемому транспортному средству 60 в положении на более близкой стороне, чем второе препятствие 62 в направлении движения, и второе препятствие 62 находится ближе к рассматриваемому транспортному средству 60, чем первое препятствие 61, контроллер 40 определяет положение остановки рассматриваемого транспортного средства 60 как положение остановки (в дальнейшем именуемое «первое положение остановки») 67 перед вторым препятствием 62.
Таким образом, остановка рассматриваемого транспортного средства 60 в первом положении 67 остановки перед вторым препятствием 62 может предотвратить препятствование рассматриваемого транспортного средства 60 движению встречного транспортного средства 64, которое избегает второе препятствие 62. Другими словами, можно предотвратить препятствование со стороны рассматриваемого транспортного средства 60 и второго препятствия 62 на второй полосе движения L2 движению встречного транспортного средства 64.
[0032]
Ссылка будет сделана на фиг. 3. Контроллер 40 устройства 1 помощи при вождении включает в себя первый блок 80 обнаружения препятствия, блок 81 обнаружения встречного транспортного средства, второй блок 82 обнаружения препятствия, блок 83 оценки траектории движения встречного транспортного средства, блок 84 оценки помех, блок 85 определения положения остановки и блок 86 формирования траектории. Функции первого блока 80 обнаружения препятствий, блока 81 обнаружения встречного транспортного средства, второго блока 82 обнаружения препятствий, блока 83 оценки траектории движения встречного транспортного средства, блока 84 оценки помех, блока 85 определения положения остановки и блока формирования траектории 86 может быть реализовано, например, позволяя процессору 41 контроллера 40 выполнять компьютерную программу, хранящуюся в запоминающем устройстве 42.
[0033]
Первый блок 80 обнаружения препятствий принимает информацию об окружении, выводимую из группы 10 датчиков окружения. На основе информации об окружении первый блок 80 обнаружения препятствий обнаруживает (идентифицирует) первое препятствие 61, которое присутствует на первой полосе движения L1, по которой движется рассматриваемое транспортное средство 60, и впереди по курсу рассматриваемого транспортного средства 60, и получает такую информацию, как как положение первого препятствия 61 в качестве информации о первом препятствии. Отметим, что блок 27 связи навигационной системы 20 может принимать информацию, такую как положение первого препятствия 61, обнаруженного другим транспортным средством, посредством связи между транспортными средствами или связи между дорогой и транспортным средством. Первый блок 80 обнаружения препятствия может получать информацию, принятую блоком 27 связи, как информацию о первом препятствии.
[0034]
В настоящем описании «препятствие» представляет собой цель уклонения, которую должно избегать рассматриваемое транспортное средство 60, и включает, например, припаркованные, остановленные и замедляющиеся транспортные средства, такие как легковой автомобиль, большой грузовик и мотоцикл, и неподвижные объекты, кроме транспортных средств, или движущиеся объекты с более низкой скоростью, чем указанная скорость транспортного средства на дороге. К стационарным объектам, кроме транспортных средств, относятся временно построенные объекты на строительных площадках и тому подобное, а также упавшие объекты на дороге. К движущимся объектам с более низкой скоростью относятся велосипеды, пешеходы и животные.
Первый блок 80 обнаружения препятствия выводит информацию о первом препятствии в блок 83 оценки траектории движения встречного транспортного средства, блок 84 оценки помех и блок 85 определения положения остановки.
[0035]
Блок 81 обнаружения встречного транспортного средства принимает информацию об окружении, выводимую из группы 10 датчиков окружения. Из информации об окружении первый блок 80 обнаружения препятствий обнаруживает (идентифицирует) встречное транспортное средство 64, движущееся по второй полосе L2 движения, которая является встречной полосой движения, смежной с первой полосой L1 движения, и приближается к рассматриваемому транспортному средству 60, и получает информацию о положение встречного транспортного средства 64 и т.п. в качестве информации о встречном транспортном средстве.
Кроме того, блок 81 обнаружения встречного транспортного средства может обнаруживать (идентифицировать) размер (продольную длину и ширину транспортного средства) встречного транспортного средства 64 и его положение (например, угол рыскания) на основе данных облака точек встречное транспортное средство 64, измеренного дальномером 11, и изображение встречного транспортного средства 64, захваченное камерой 12, и может получать информацию о размере и положении встречного транспортного средства 64 как информацию о встречном транспортном средстве.
[0036]
Кроме того, блок 81 обнаружения встречного транспортного средства может получать информацию о типе транспортного средства встречного транспортного средства 64 как информацию о встречном транспортном средстве на основе изображения встречного транспортного средства 64, снятого камерой 12.
Например, блок 81 обнаружения встречного транспортного средства может идентифицировать тип транспортного средства встречного транспортного средства 64 путем сопоставления шаблонов между изображениями различных транспортных средств, ранее сохраненных в запоминающем устройстве 42 или подобном контроллере 40, и изображением встречного транспортного средства 64, снятым камерой 12. В качестве альтернативы, например, блок 81 обнаружения встречного транспортного средства может передавать изображение встречного транспортного средства 64, снятое камерой 12, на внешнее устройство (например, такое как серверное устройство) через блок 27 связи и может получать информацию о типе транспортного средства встречного транспортного средства 64, идентифицированный внешним устройством на основе изображения встречного транспортного средства 64 через блок 27 связи.
[0037]
Блок 81 обнаружения встречного транспортного средства может получать информацию о размере встречного транспортного средства 64 как информацию о встречном транспортном средстве на основе типа транспортного средства встречного транспортного средства 64. Например, запоминающее устройство 42 или т.п. контроллера 40 может хранить базу данных, в которой типы транспортных средств различных транспортных средств связаны с информацией об их размерах. Блок 81 обнаружения встречного транспортного средства может идентифицировать размер встречного транспортного средства 64 на основе базы данных и типа транспортного средства встречного транспортного средства 64.
Дополнительно, например, блок 81 обнаружения встречного транспортного средства может передавать информацию о типе транспортного средства встречного транспортного средства 64 на внешнее устройство (такое как, например, серверное устройство) через блок 27 связи и может принимать информацию от размера встречного транспортного средства 64, идентифицированного внешним устройством на основе типа транспортного средства встречного транспортного средства 64 через блок 27 связи.
[0038]
Кроме того, блок 81 обнаружения встречного транспортного средства может получать информацию об уровне навыков вождения встречного транспортного средства 64 в качестве информации о встречном транспортном средстве. Блок 81 обнаружения встречного транспортного средства может принимать информацию об уровне навыков вождения от встречного транспортного средства 64 через связь между транспортными средствами или связь между дорогой и транспортным средством. Встречное транспортное средство 64 может включать в себя контроллер для вычисления уровня навыков вождения встречного транспортного средства 64 на основе истории вождения водителя встречного транспортного средства 64. Например, уровень навыков вождения может быть вычислен на основе истории вождения водителя, включая медленное или быстрое управление рулем, медленное или быстрое действие акселератора, медленное или быстрое действие торможения и расстояния между транспортными средствами.
[0039]
Кроме того, блок 81 обнаружения встречного транспортного средства может определять, является ли встречное транспортное средство 64 автономным автомобилем или нет, на основе типа транспортного средства встречного транспортного средства 64, и может получать информацию об уровне навыков вождения и содержании управления автономным вождением встречного транспортного средства 64 в качестве информации об уровне навыков вождения встречного транспортного средства 64. Например, запоминающее устройство 42 или т.п. контроллера 40 может хранить базу данных, в которой типы транспортных средств различных транспортных средств связаны с информацией о функциях автономного вождения. Блок 81 обнаружения встречного транспортного средства может определять, является ли встречное транспортное средство 64 автономным автомобилем или нет, на основе базы данных и типа транспортного средства встречного транспортного средства 64, а также может идентифицировать информацию об уровне навыков вождения и управлять автономным вождением встречного транспортного средства 64.
[0040]
Дополнительно, например, блок 81 обнаружения встречного транспортного средства может передавать информацию о типе транспортного средства встречного транспортного средства 64 на внешнее устройство (например, такое как серверное устройство) через блок 27 связи и может получать информацию о уровень навыков вождения и содержание управления автономным вождением, идентифицированное внешним устройством на основе типа транспортного средства встречного транспортного средства 64 через блок 27 связи.
Обратите внимание, что блок 27 связи может получать информацию о местоположении, размере, ориентации и типе транспортного средства встречного транспортного средства 64 от другого транспортного средства, такого как встречное транспортное средство 64, через связь между транспортными средствами или связь между дорогой и транспортным средством. Блок 81 обнаружения встречного транспортного средства может получать информацию, принятую блоком 27 связи, как информацию о встречном транспортном средстве.
Блок 81 обнаружения встречного транспортного средства выводит информацию о встречном транспортном средстве в блок 83 оценки траектории движения встречного транспортного средства и блок 85 определения положения остановки.
[0041]
Второй блок 82 обнаружения препятствий принимает информацию об окружении, выводимую из группы 10 датчиков окружения. На основе информации об окружении второй блок 82 обнаружения препятствий обнаруживает (идентифицирует) второе препятствие 62, которое присутствует на второй полосе L2 движения, которая является встречной полосой движения и которая находится впереди по курсу рассматриваемого транспортного средства 60, и получает информацию о положении и т.п. второго препятствия 62 в качестве информации о втором препятствии. Отметим, что блок 27 связи навигационной системы 20 может принимать информацию о положении и т.п. второго препятствия 62, обнаруженного другим транспортным средством, посредством связи между транспортными средствами или связи между дорогой и транспортным средством. Второй блок 82 обнаружения препятствия может получать информацию, принятую блоком 27 связи, как информацию о втором препятствии.
Второй блок 82 обнаружения препятствия выводит информацию о втором препятствии в блок 83 оценки траектории движения встречного транспортного средства и блок 85 определения положения остановки.
[0042]
Блок 83 оценки траектории движения встречного транспортного средства определяет, находится ли второе препятствие 62 на второй полосе L2 движения ближе к рассматриваемому транспортному средству 60, чем первое препятствие 61 на первой полосе L1 движения, на основе информации о первом препятствии и информации о втором препятствии. Другими словами, блок 83 оценки траектории движения встречного транспортного средства определяет, является ли продольное расстояние (то есть расстояние в направлении движения) между вторым препятствием 62 и рассматриваемым транспортным средством 60 короче, чем продольное расстояние между первым препятствием 61 и рассматриваемым транспортным средством 60.
Блок 83 оценки траектории движения встречного транспортного средства выводит результат оценки того, находится ли второе препятствие 62 ближе к рассматриваемому транспортному средству 60, чем первое препятствие 61, в блок 85 определения положения остановки.
[0043]
Когда второе препятствие 62 находится ближе к рассматриваемому транспортному средству 60, чем первое препятствие 61, блок 83 оценки траектории движения встречного транспортного средства оценивает прогнозируемую траекторию движения, по которой встречное транспортное средство 64, как прогнозируется, будет двигаться в будущем.
Например, блок 83 оценки траектории движения встречного транспортного средства может оценивать прогнозируемую траекторию движения встречного транспортного средства 64 на основе информации об окружении, выводимой из группы 10 датчиков окружения, информации о первом препятствии, информации о втором препятствии и информация о встречном транспортном средстве. Например, в сцене вождения, показанной на фиг. 2A и 2B, блок 83 оценки траектории движения встречного транспортного средства оценивает прогнозируемую траекторию движения встречного транспортного средства 64, которое избегает второе препятствие 62 на второй полосе L2 движения.
[0044]
Например, блок 83 оценки траектории движения встречного транспортного средства может обнаруживать границу полосы движения второй полосы L2 движения из информации об окружении. Блок 83 оценки траектории движения встречного транспортного средства может оценивать прогнозируемую траекторию движения встречного транспортного средства 64 на основе положения границы полосы движения второй полосы L2 движения, истории движения встречного транспортного средства 64, истории положения встречного транспортного средства 64, скорость транспортного средства встречного транспортного средства 64, относительное положение между встречным транспортным средством 64 и первым препятствием 61, относительное положение между встречным транспортным средством 64 и вторым препятствием 62 и т.п.
[0045]
Ссылка будет сделана на фиг. 4. Штрих-пунктирная линия 91 указывает прогнозируемую траекторию движения встречного транспортного средства 64. Блок 83 оценки траектории движения встречного транспортного средства прогнозирует область движения встречного транспортного средства 64, окруженную прогнозируемой траекторией 65, по которой может пройти правый конец встречного транспортного средства 64, и прогнозируемой траекторией 66, по которой левый конец встречного транспортного средства 64 может проходить на основе прогнозируемой траектории 91 движения встречного транспортного средства 64.
Например, блок 83 оценки траектории движения встречного транспортного средства может оценивать в качестве области движения область шириной W, проходящую вдоль прогнозируемой траектории 91 движения и центрированную на прогнозируемой траектории 91 движения.
[0046]
Блок 83 оценки траектории движения встречного транспортного средства может устанавливать в качестве ширины W длину, полученную путем добавления заранее определенного запаса к ширине транспортного средства, обнаруженной блоком 81 обнаружения встречного транспортного средства. Например, блок 83 оценки траектории движения встречного транспортного средства может изменять запас области движения встречного транспортного средства 64 в соответствии с уровнем навыков вождения и т.п. встречного транспортного средства 64, полученным блоком 81 обнаружения встречного транспортного средства. Другими словами, блок 83 оценки траектории движения встречного транспортного средства может оценивать область движения встречной области 64 на основе уровня навыков вождения и т.п. встречного транспортного средства 64.
[0047]
Например, когда уровень навыков вождения встречного транспортного средства 64 низкий (например, когда уровень навыков вождения водителя или автономного вождения встречного транспортного средства 64 низкий, или когда производительность или качество содержимого управления автономного вождения низкая), трудно предсказать траекторию движения встречного транспортного средства 64, поэтому ожидается, что прогнозируемая траектория 91 движения будет значительно колебаться. В этом случае запас области движения может быть увеличен, чтобы увеличить ширину W области движения.
[0048]
Напротив, когда уровень навыков вождения встречного транспортного средства 64 высок, ожидается, что траектория движения встречного транспортного средства 64 будет предсказуемой с высокой точностью, так что запас области движения может быть уменьшен, чтобы уменьшить ширину W области движения.
Ссылка будет сделана на фиг. 3. Блок 83 оценки траектории движения встречного транспортного средства выводит информацию о расчетной области движения встречной области 64 в блок 84 оценки помех.
[0049]
Блок 84 оценки помех определяет, может ли рассматриваемое транспортное средство 60 мешать области движения встречного транспортного средства 64, когда рассматриваемое транспортное средство 60 останавливается перед первым препятствием 61, на основе информации о области движения встречного транспортного средства. 64 и информация о первом препятствии.
Ссылка будет сделана на фиг. 2А. Например, блок 84 оценки помех определяет положение 63 остановки, в котором рассматриваемое транспортное средство 60 останавливается перед первым препятствием 61, а рассматриваемое транспортное средство 60 и встречное транспортное средство 64 пересекают друг друга на основе продольного положения (т.е. положения в направлении движения рассматриваемого транспортного средства 60, это положение в дальнейшем может называться также положением направления движения) первого препятствия 61, указанного информацией о первом препятствии. Например, блок 84 оценки помех может определять продольное положение и поперечное положение (то есть положение по ширине транспортного средства) положения 63 остановки, так что рассматриваемое транспортное средство 60 может обогнать первое препятствие 61 путем плавного поворота вслед за рассматриваемым транспортным средством 60 остановились в положении 63 остановки, и встречное транспортное средство 64 проезжают друг друга.
[0050]
Кроме того, например, блок 84 оценки помех может определять, может ли рассматриваемое транспортное средство 60 мешать области движения встречного транспортного средства 64, в зависимости от того, перекрывает ли область, занимаемая рассматриваемым транспортным средством 60, область движения встречного транспортного средства 64. Например, блок 84 оценки помех может решить, что рассматриваемое транспортное средство 60 может мешать области движения встречного транспортного средства 64, когда область, занятая рассматриваемым транспортным средством 60, остановившимся в положении 63 остановки, перекрывает область движения встречного транспортного средства 64. Например, блок 84 оценки помех может решить, что нет возможности помех между рассматриваемым транспортным средством 60 и областью движения встречного транспортного средства 64, когда область, занятая рассматриваемым транспортным средством 60, не перекрывает область движения встречного транспортного средства. 64.
Ссылка будет сделана на фиг. 3. Блок 84 оценки помех выводит результат оценки о возможности того, что рассматриваемое транспортное средство 60 мешает области движения встречного транспортного средства 64, в блок 85 определения положения остановки.
[0051]
На основе результата оценки блока 84 оценки помех блок 85 определения положения остановки определяет положение остановки для ожидания завершения проезда между рассматриваемым транспортным средством 60 и встречным транспортным средством 64. Когда рассматриваемое транспортное средство 60 может мешать области движения встречного транспортного средства 64, когда рассматриваемое транспортное средство 60 останавливается перед первым препятствием 61, блок 85 определения положения остановки определяет первое положение 67 остановки (см. Фиг. 2B) перед вторым препятствие 62 в качестве положения остановки рассматриваемого транспортного средства 60.
[0052]
Например, блок 85 определения положения остановки может определять продольное положение (то есть положение направления движения) первого положения 67 остановки, например, продольное расстояние (то есть расстояние в направлении движения) между вторым препятствием 62 и рассматриваемым транспортным средством 60, так что рассматриваемое транспортное средство 60, остановившееся в первом положении 67 остановки, не мешает области движения встречного транспортного средства 64, которое избегает второе препятствие 62 и возвращается на вторую полосу движения L2 движения.
Например, блок 85 определения положения остановки может определять продольное положение первого положения 67 остановки, чтобы быть расположенным перед участком, где область движения встречного транспортного средства 64 переходит в первую полосу L1 движения.
[0053]
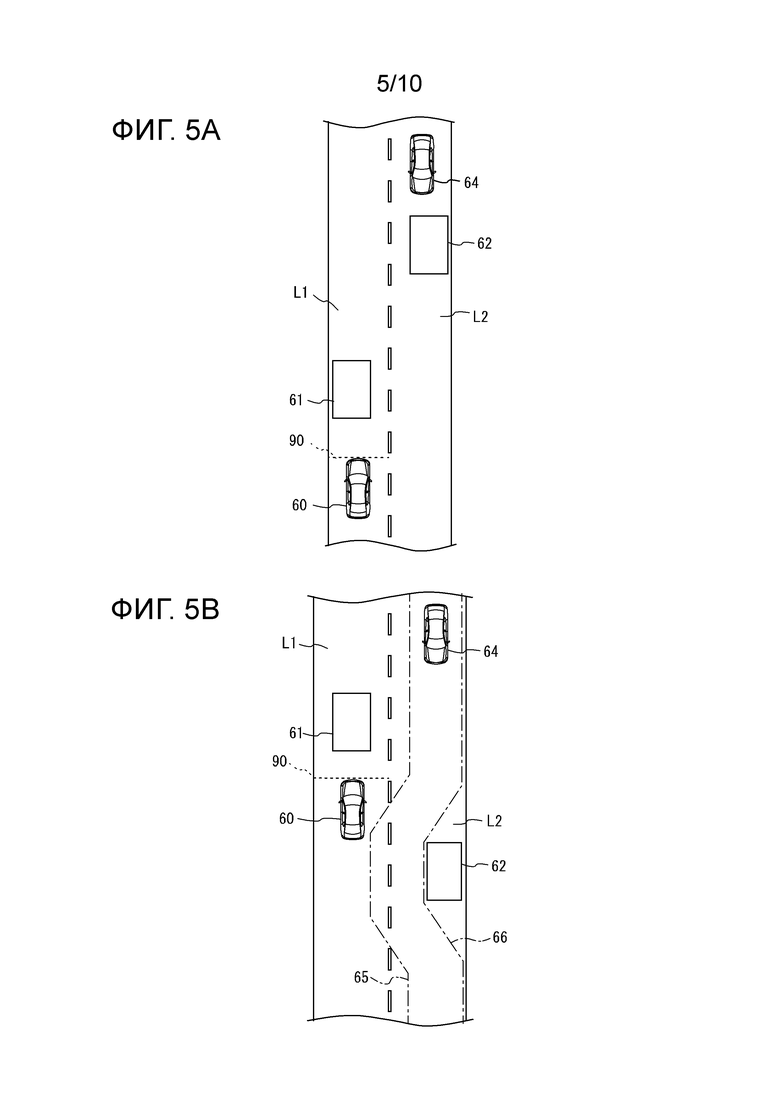
Ссылка будет сделана на фиг. 5А. Когда блок 83 оценки траектории движения встречного транспортного средства определяет, что первое препятствие 61 находится ближе к рассматриваемому транспортному средству 60, чем второе препятствие 62, блок 85 определения положения остановки определяет положение 90 остановки на основе продольного направления (т.е. положение направления) первого препятствия 61, указанного информацией о первом препятствии. В положении 90 остановки рассматриваемое транспортное средство 60 ожидает завершения проезда между рассматриваемым транспортным средством 60 и встречным транспортным средством 64. Блок 85 определения положения остановки может устанавливать положение 90 остановки, например, как положение перед первым препятствием 61 на заранее определенное расстояние, так что рассматриваемое транспортное средство 60 может избежать первое препятствие 61.
[0054]
Ссылка будет сделана на фиг. 5Б. Даже когда положение 90 остановки присутствует для остановки рассматриваемого транспортного средства 60 перед первым препятствием 61, так что рассматриваемое транспортное средство 60 не мешает области движения встречного транспортного средства 64, блок 85 определения положения остановки определяет положение 90 остановки на основе продольного положения (то есть положения направления движения) первого препятствия 61, указанного информацией о первом препятствии.
измениться. Как показано на фиг. 5A и 5B, при определении положения 90 остановки в положении перед первым препятствием 61 блок 84 оценки помех может определять положение в продольном направлении и положение в поперечном направлении (т.е. Положение по ширине транспортного средства) положения 90 остановки, так что рассматриваемое транспортное средство 60 может обогнать (уклониться) первое препятствие 61 посредством плавного поворота после прохождения между рассматриваемым транспортным средством 60, остановленным в положении 90 остановки, и встречным транспортным средством 64. Обратите внимание, что продольное положение и поперечное положение положения 90 остановки могут быть заранее определенными положениями, где расстояние, достаточное для того, чтобы рассматриваемое транспортное средство 60 могло избежать первое препятствие 61, сохраняется относительно первого препятствия 61, или могут быть положениями, установленными на основа области движения, рассчитанная, чтобы позволить рассматриваемому транспортному средству 60 избегать первого препятствия 61 за счет плавного поворота.
[0055]
Ссылка будет сделана на фиг. 3. Блок 85 определения положения остановки выводит информацию об определенном положении остановки рассматриваемого транспортного средства 60 в блок 86 формирования траектории.
Блок 86 формирования траектории формирует траекторию движения, по которой будет двигаться рассматриваемое транспортное средство, на основе информации об окружении, выводимой из группы 10 датчиков окружения, данных карты дорог и данных маршрута движения, выводимых из навигационной системы 20, информации о транспортном средстве и аналогичные выходные сигналы группы 30 датчиков транспортного средства.
[0056]
Блок 86 формирования траектории формирует траекторию движения, чтобы позволить рассматриваемому транспортному средству 60 достичь положения остановки, определенного блоком 85 определения положения остановки, так что рассматриваемое транспортное средство 60 останавливается и ожидает завершения проезда встречного транспортного средства 64, прежде чем избежать первое препятствие 61.
Блок 86 формирования траектории может формировать траекторию движения таким образом, чтобы включать профиль скорости, позволяющий рассматриваемому транспортному средству остановиться в положении остановки или замедлить и пройти положение остановки на основе информации о транспортном средстве и тому подобного, выводимого из группа датчиков транспортного средства 30. Блок 86 формирования траектории выводит сформированную траекторию движения в устройство 50 управления движением.
[0057]
Устройство 50 управления движением выполняет помощь при вождении, предписывая рассматриваемому транспортному средству 60 двигаться в положение остановки, определяемое блоком 85 определения положения остановки, и останавливая рассматриваемое транспортное средство 60 в положении остановки на основе траектории движения, созданной посредством блока 86 формирования траектории.
Например, когда рассматриваемое транспортное средство 60 может мешать области движения встречного транспортного средства 64, когда второе препятствие 62 присутствует на более близкой стороне, чем первое препятствие 61 в направлении движения рассматриваемого транспортного средства 60, и рассматриваемое транспортное средство 60 останавливается перед первым препятствием 61, рассматриваемое транспортное средство 60 перемещается в первое положение 67 остановки перед вторым препятствием 62 в направлении движения рассматриваемого транспортного средства 60, как проиллюстрировано на фиг. 2B, а затем рассматриваемое транспортное средство 60 останавливается в первом положении 67 остановки.
[0058]
Таким образом, когда рассматриваемое транспортное средство 60 стоит в положении перед вторым препятствием 62, можно предотвратить препятствование рассматриваемого транспортного средства 60 движению встречного транспортного средства 64, которое избегает второе препятствие 62.
Кроме того, например, когда первое препятствие 61 присутствует на более близкой стороне, чем второе препятствие 62 в направлении движения рассматриваемого транспортного средства 60, рассматриваемое транспортное средство 60 не препятствует движению встречного транспортного средства 64, которое избегает второе препятствие 62, даже когда рассматриваемое транспортное средство 60 останавливается в положении 90 остановки, определенном на стороне перед первым препятствием 61 в направлении движения рассматриваемого транспортного средства 60 относительно положения первого препятствия 61, как проиллюстрировано на фиг. 5А.
[0059]
То же самое относится к случаю, когда положение 90 остановки присутствует для остановки рассматриваемого транспортного средства 60 перед первым препятствием 61, так что рассматриваемое транспортное средство 60 не мешает области движения встречного транспортного средства 64, как проиллюстрировано на 5B. В этих случаях устройство 50 управления движением предписывает рассматриваемому транспортному средству 60 двигаться к положению 90 остановки, определенному на основе продольного положения (то есть положения направления движения) первого препятствия 61, а затем останавливает рассматриваемое транспортное средство 60 в положении 90 остановки.
[0060]
(Способ помощи при вождении)
Далее будет описан пример способа помощи при вождении согласно первому варианту осуществления со ссылкой на блок-схему на фиг. 6.
На этапе S1 первый блок 80 обнаружения препятствия определяет, присутствует ли первое препятствие 61 впереди по курсу рассматриваемого транспортного средства 60 на первой полосе L1 движения. Когда присутствует первое препятствие 61 (этап S1: Y), обработка переходит к этапу S3. Когда первое препятствие 61 отсутствует (этап S1: N), обработка переходит к этапу S2.
[0061]
На этапе S2 блок 86 формирования траектории формирует траекторию движения, чтобы двигаться вперед по первой полосе движения L1. Затем обработка переходит к этапу S12.
На этапе S3 блок 81 обнаружения встречного транспортного средства определяет, присутствует ли встречное транспортное средство 64, которое движется по второй полосе L2 движения, которая является встречной полосой движения, и приближается к рассматриваемому транспортному средству 60. Когда встречное транспортное средство 64 присутствует (этап S3: Y), обработка переходит к этапу S5. Когда встречное транспортное средство 64 отсутствует (этап S3: N), обработка переходит к этапу S4.
[0062]
На этапе S4 блок 86 формирования траектории формирует траекторию движения для обхода первого препятствия 61 на первой полосе движения L1. Затем обработка переходит к этапу S12.
На этапе S5 второй блок 82 обнаружения препятствия определяет, присутствует ли второе препятствие 62 на второй полосе L2 движения и впереди в направлении движения рассматриваемого транспортного средства 60. Когда присутствует второе препятствие 62 (этап S5: Y), обработка переходит к этапу S6. Когда второе препятствие 62 отсутствует (этап S5: N), обработка переходит к этапу S10.
[0063]
На этапе S6 блок 83 оценки траектории движения встречного транспортного средства определяет, находится ли положение второго препятствия 62 на второй полосе L2 движения на более близкой стороне, чем положение первого препятствия 61 на первой полосе L1 движения в направлении движения рассматриваемого транспортного средства 60. Когда положение второго препятствия 62 находится на более близкой стороне, чем положение первого препятствия 61 в направлении движения рассматриваемого транспортного средства 60 (этап S6: Y), обработка переходит к этапу S7. Когда первое препятствие 61 ближе к рассматриваемому транспортному средству 60, чем второе препятствие 62 (этап S6: N), обработка переходит к этапу S10.
[0064]
На этапе S7 блок 83 оценки траектории движения встречного транспортного средства оценивает прогнозируемую траекторию 91 движения встречного транспортного средства 64, которое преодолевает второе препятствие 62, и на основе прогнозируемой траектории 91 движения оценивает область движения встречного транспортного средства 64, которое движется, избегая второго препятствия 62.
На этапе S8 блок 84 оценки помех определяет, может ли рассматриваемое транспортное средство 60 мешать области движения встречного транспортного средства 64, когда рассматриваемое транспортное средство 60 останавливается перед первым препятствием 61ped.
[0065]
Когда рассматриваемое транспортное средство 60 может мешать области движения встречного транспортного средства 64 (этап S8: Y), обработка переходит к этапу S9. Когда рассматриваемое транспортное средство 60 может быть остановлено перед первым препятствием 61, не мешая области движения встречного транспортного средства 64 (этап S8: N), обработка переходит к этапу S10.
На этапе S9 блок 85 определения положения остановки определяет продольное положение (то есть положение направления движения) первого положения 67 остановки для остановки рассматриваемого транспортного средства 60 относительно положения второго препятствия 62 на второй полосе L2 движения. Например, блок 85 определения положения остановки определяет продольное положение первого положения 67 остановки, чтобы быть перед вторым препятствием 62. Затем обработка переходит к этапу S11.
[0066]
На этапе S10 блок 85 определения положения остановки определяет продольное положение (то есть положение направления движения) положения 90 остановки для остановки рассматриваемого транспортного средства 60 относительно положения первого препятствия 61 на первой полосе движения L1. Затем обработка переходит к этапу S11.
На этапе S11 блок 86 формирования траектории формирует траекторию движения, чтобы достичь положения остановки, определенного блоком 85 определения положения остановки.
На этапе S12 устройство 50 управления движением выполняет помощь при вождении, которая позволяет рассматриваемому транспортному средству 60 перемещаться в положение остановки, определяемое блоком 85 определения положения остановки, и останавливает рассматриваемое транспортное средство 60 в положении остановки на основе траектории движения, сформированной блоком 86 формирования траектории. Затем обработка завершается.
Отметим, что в способе помощи при вождении, описанном в вышеупомянутом варианте осуществления, устройство 50 управления движением останавливает рассматриваемое транспортное средство 60 в положении остановки, определяемом блоком 85 определения положения остановки, но настоящее изобретение этим не ограничивается. Например, положение остановки, определенное блоком 85 определения положения остановки, может отображаться на экране навигации, чтобы показывать положение остановки водителю рассматриваемого транспортного средства 60, посредством чего рассматриваемому транспортному средству 60 может быть оказана помощь в остановке в положении остановки.
[0067]
(Эффекты первого варианта осуществления)
(1) Первый блок 80 обнаружения препятствия определяет положение первого препятствия 61 впереди в направлении движения рассматриваемого транспортного средства 60 на первой полосе L1 движения, по которой движется рассматриваемое транспортное средство 60. Второй блок 82 обнаружения препятствия определяет положение второго препятствия 62 впереди в направлении движения рассматриваемого транспортного средства 60 на второй полосе L2 движения, которая является встречной полосой движения, смежной с первой полосой L1 движения. Когда положение второго препятствия 62 находится на более близкой стороне, чем положение первого препятствия 61 в направлении движения рассматриваемого транспортного средства 60, блок 85 определения положения остановки определяет положение остановки рассматриваемого транспортного средства 60 как первое положение 67 остановки перед вторым препятствием 62 и помогает рассматриваемому транспортному средству 60 остановиться в первом положении 67 остановки.
[0068]
Путем остановки рассматриваемого транспортного средства 60 в таком положении рассматриваемое транспортное средство 60 может ожидать прохождения между рассматриваемым транспортным средством 60 и встречным транспортным средством 64, не препятствуя движению встречного транспортного средства 64, которое избегает второе препятствие 62. Другими словами, можно предотвратить препятствование движению встречного транспортного средства 64 со стороны рассматриваемого транспортного средства 60, остановленного в ответ на препятствие впереди рассматриваемого транспортного средства 60 и второе препятствие 62 на встречной полосе L2 движения. Это исключает риск возникновения препятствий на дороге. Таким образом, может быть предоставлена улучшенная технология создания траектории движения, которая улучшила качество траектории движения для автономного вождения рассматриваемого транспортного средства 60.
Технология может способствовать повышению топливной экономичности, поскольку можно предотвратить ненужное вождение, например, движение задним ходом рассматриваемого транспортного средства 60, чтобы обеспечить возможность проезда встречного транспортного средства 64 после остановки рассматриваемого транспортного средства 60 в положении, в котором есть препятствие движению встречного транспортного средства 64.
[0069]
(2) Когда рассматриваемое транспортное средство 60 может мешать области движения встречного транспортного средства 64, когда положение второго препятствия 62 находится на более близкой стороне, чем положение первого препятствия 61 в направлении движения рассматриваемого транспортного средства 60, и рассматриваемое транспортное средство 60 останавливается перед первым препятствием 61, блок 85 определения положения остановки может определять положение остановки рассматриваемого транспортного средства 60 как первое положение 67 остановки.
В результате положение остановки рассматриваемого транспортного средства 60 может переключаться на основе того, препятствует ли рассматриваемое транспортное средство 60 движению встречного транспортного средства 64. Таким образом, рассматриваемое транспортное средство 60 может ждать проезда между рассматриваемым транспортным средством 60 и встречным транспортным средством 64, не препятствуя движению встречного транспортного средства 64, которое избегает второе препятствие 62.
[0070]
(3) Блок 83 оценки траектории движения встречного транспортного средства может оценивать область движения встречного транспортного средства 64. Блок 84 оценки помех может оценивать возможность того, что рассматриваемое транспортное средство 60 будет мешать области движения встречного транспортного средства 64, в зависимости от того, перекрывает ли расчетная область движения область, занятую рассматриваемым транспортным средством 60, при остановке перед первым препятствием 61.
В результате можно оценить, может ли остановившееся рассматриваемое транспортное средство 60 мешать области движения встречного транспортного средства 64.
[0071]
(4) Блок 81 обнаружения встречного транспортного средства может определять уровень навыков вождения встречного транспортного средства 64. Блок 83 оценки траектории движения встречного транспортного средства может оценивать область движения встречного транспортного средства 64 в соответствии с уровнем навыков вождения.
В результате рассматриваемое транспортное средство 60 можно заставить стоять в безопасном положении, даже когда уровень навыков вождения встречного транспортного средства 64 низкий.
[0072]
(5) Когда второе препятствие 62 находится дальше от рассматриваемого транспортного средства 60, чем первое препятствие 61, блок 85 определения положения остановки может определять положение остановки рассматриваемого транспортного средства 60 относительно продольного положения (то есть положение направления движения) первого препятствия 61.
Когда второе препятствие 62 находится дальше от рассматриваемого транспортного средства 60, чем первое препятствие 61, нет никакой взаимной помехи между движением встречного транспортного средства 64, которое избегает второе препятствие 62, и рассматриваемым транспортным средством 60, даже когда рассматриваемое транспортное средство 60 останавливается в любом месте. Положение перед первым препятствием 61. Соответственно, в этом случае рассматриваемое транспортное средство 60 может быстрее избегать первого препятствия 61, продвигая рассматриваемое транспортное средство 60 в положение рядом с первым препятствием 61 перед прохождением встречного транспортного средства 64.
[0073]
(Второй вариант осуществления)
Конструкция устройства 1 помощи при вождении согласно второму варианту осуществления в основном такая же, как конструкция устройства 1 помощи при вождении согласно первому варианту осуществления, показанному на фиг. 1. Кроме того, функциональная структура контроллера 40 согласно второму варианту осуществления в основном такая же, как функциональная структура контроллера 40, проиллюстрированного на фиг. 3.
Ссылка будет сделана на фиг. 7. Устройство 1 помощи при вождении согласно второму варианту осуществления определяет первое положение 67 остановки, чтобы рассматриваемое транспортное средство 60, остановившееся в первом положении 67 остановки, не мешало области движения встречного транспортного средства 64, которое избегает второе препятствие 62 и возвращается во вторую полосу L2 движения, как и в первом варианте осуществления.
[0074]
Затем устройство 1 помощи при вождении согласно второму варианту осуществления определяет размер встречного транспортного средства 64. Устройство 1 помощи при вождении может определять размер встречного транспортного средства 64, например, продольную длину L встречного транспортного средства 64 или ширину транспортного средства встречного транспортного средства 64. Когда размер встречного транспортного средства 64 превышает пороговое значение, первое положение остановки корректируется как положение 92, расположенное на более близкой стороне в направлении движения рассматриваемого транспортного средства 60 по отношению ко второму препятствию 62. Другими словами, когда размер встречного транспортного средства 64 превышает пороговое значение, первое положение остановки корректируется на более близкую сторону в направлении движения рассматриваемого транспортного средства 60 по отношению ко второму препятствию 62.
Таким образом, когда размер встречного транспортного средства 64 превышает пороговое значение, первое положение остановки устанавливается на более близкой стороне в направлении движения рассматриваемого транспортного средства 60 относительно второго препятствия 62, чем когда размер встречного транспортного средства 64 не превышает пороговое значение, что позволяет рассматриваемому транспортному средству 60 ожидать завершения проезда между встречным транспортным средством 64 и рассматриваемым транспортным средством 60 в положении, удаленном от положения, где встречное транспортное средство 64 пересекает первую полосу L1 движения (или положения, в котором встречное транспортное средство 64 приближается к первой полосе движения L1), чтобы объехать второе препятствие 62. Это может, например, уменьшить страх, который испытывает водитель транспортного средства во время проезда большого встречного транспортного средства 64, такого как грузовик или большой прицеп.
[0075]
В частности, блок 85 определения положения остановки, проиллюстрированный на фиг. 3 определяет продольное положение (то есть положение направления движения) первого положения 67 остановки, чтобы рассматриваемое транспортное средство 60, остановившееся в первом положении 67 остановки, не мешало области движения встречного транспортного средства 64, которое избегает второе препятствие 62, и возвращается на вторую полосу L2 движения.
Затем блок 85 определения положения остановки определяет, превышает ли размер встречного транспортного средства 64 предварительно определенное пороговое значение на основе информации о встречном транспортном средстве, выводимой блоком 81 обнаружения встречного транспортного средства.
Когда размер встречного транспортного средства 64 превышает предварительно определенное пороговое значение, блок 85 определения положения остановки корректирует первое положение остановки как положение 92 на более близкой стороне в направлении движения рассматриваемого транспортного средства 60 относительно второго препятствия 62, чем когда размер встречного транспортного средства 64 не превышает пороговое значение.
[0076]
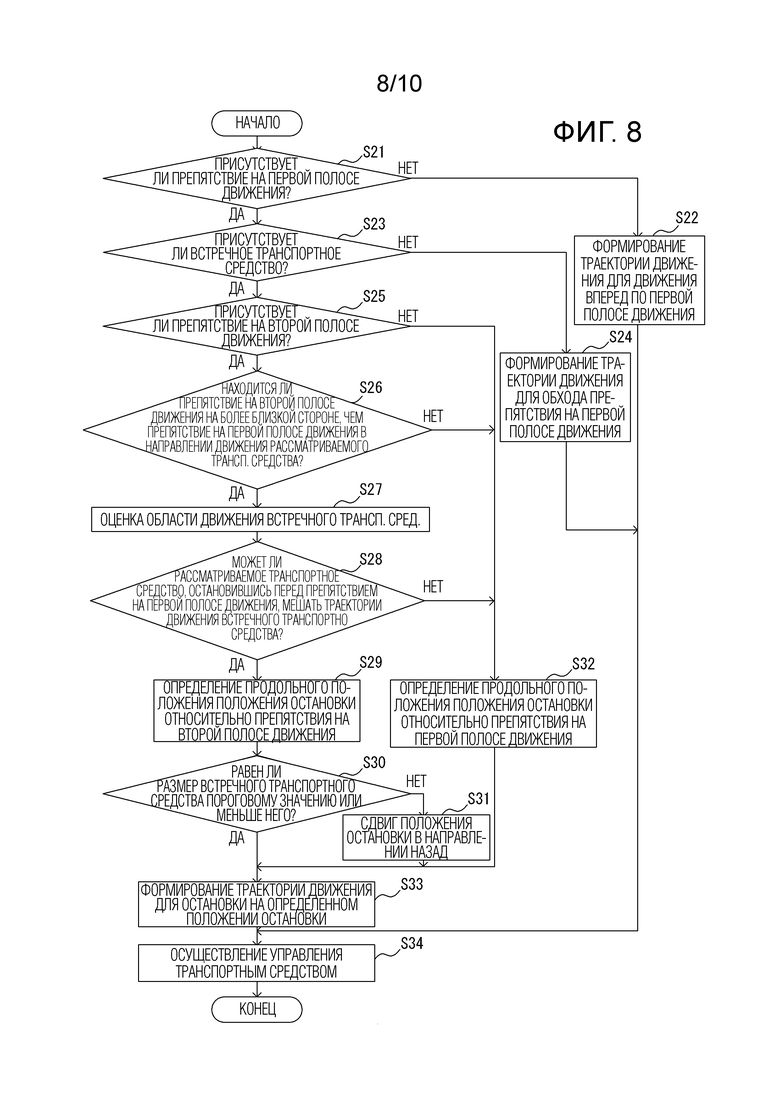
Далее будет описан пример способа помощи при вождении согласно второму варианту осуществления со ссылкой на блок-схему на фиг. 8. Обработка этапов с S21 по S29 такая же, как и на этапах с S1 по S9, описанных со ссылкой на фиг. 6. Обработка этапов с S32 по S34 такая же, как и на этапах с S10 по S12, описанных со ссылкой на фиг. 6.
На этапе S29 блок 85 определения положения остановки определяет продольное положение первого положения 67 остановки относительно положения второго препятствия 62, а затем обработка переходит к этапу S30.
[0077]
На этапе S30 блок 85 определения положения остановки определяет, равен ли размер встречного транспортного средства 64 пороговому значению или меньше. Когда размер встречного транспортного средства 64 равен или меньше порогового значения (этап S30: Y), обработка переходит к этапу S33. В этом случае первое положение 67 остановки, определенное на этапе S29, не корректируется и затем определяется как положение остановки рассматриваемого транспортного средства 60.
Когда размер встречного транспортного средства 64 превышает пороговое значение (этап S30: N), обработка переходит к этапу S31.
[0078]
На этапе S31 блок 85 определения положения остановки сдвигает первое положение 67 остановки, определенное на этапе S29, в направлении назад.
Другими словами, блок 85 определения положения остановки корректирует положение первого шага на положение 92, находящееся дальше от второго препятствия 62. Затем обработка переходит к этапу S33.
[0079]
(Эффекты второго варианта осуществления)
Блок 81 обнаружения встречного транспортного средства оценивает размер встречного транспортного средства 64. Когда размер встречного транспортного средства 64 превышает пороговое значение, блок 85 определения положения остановки устанавливает первое положение остановки в положение на более близкой стороне в направлении движения рассматриваемого транспортного средства 60 относительно второго препятствия 62, чем когда размер встречного транспортного средства 64 не превышает пороговое значение.
Таким образом, устанавливая первое положение остановки в положение на более близкой стороне в направлении движения рассматриваемого транспортного средства 60 относительно второго препятствия 62, рассматриваемое транспортное средство 60 может ждать завершения проезда между встречным транспортным средством 64 и рассматриваемым транспортным средством 60 в положении, удаленном от положения, где встречное транспортное средство 64 пересекает первую полосу L1 движения (или положение, где встречное транспортное средство 64 приближается к первой полосе движения L1), чтобы избежать второго препятствия 62. Это может, например, уменьшить страх, который испытывает водитель транспортного средства во время проезда большого встречного транспортного средства 64, такого как грузовик или большой прицеп.
[0080]
Третий вариант осуществления
Конструкция устройства 1 помощи при вождении согласно третьему варианту осуществления в основном такая же, как конструкция устройства 1 помощи при вождении согласно первому варианту осуществления, показанному на фиг. 1. Кроме того, функциональная структура контроллера 40 согласно третьему варианту осуществления в основном такая же, как структура контроллера 40, проиллюстрированного на фиг. 3.
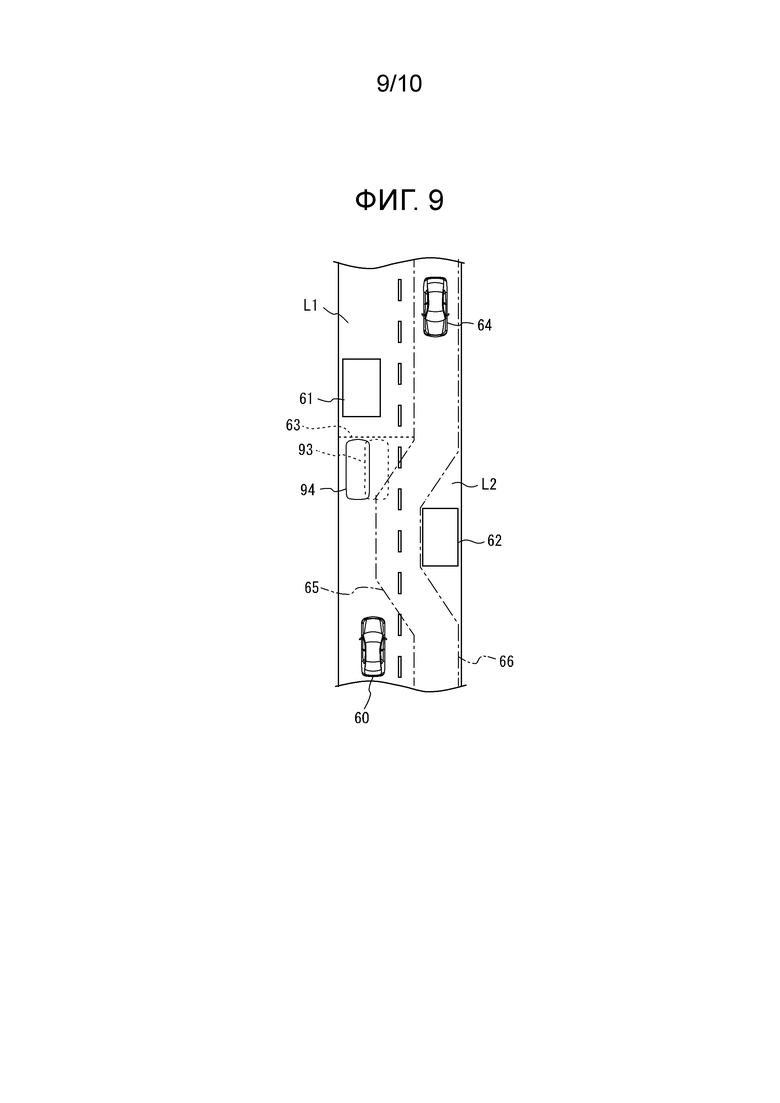
Ссылка будет сделана на фиг. 9. Блок 84 оценки помех контроллера 40 согласно третьему варианту осуществления определяет, может ли рассматриваемое транспортное средство 60 мешать области движения встречного транспортного средства 64, которое избегает второе препятствие 62, когда рассматриваемое транспортное средство 60 останавливается в положении остановки ( в дальнейшем именуемое «второе положение остановки») 93 перед первым препятствием 61 в направлении движения рассматриваемого транспортного средства 60. Второе положение 93 останова может быть определено таким же образом, как положение 90 останова, описанное, например, со ссылкой на фиг. 5A и 5B.
[0081]
Когда рассматриваемое транспортное средство 60, остановившееся во втором положении 93 остановки, может мешать области движения встречного транспортного средства 64, блок 85 определения положения остановки определяет положение остановки (далее именуемое «третьим положением остановки») 94, сдвигая второе положение 93 остановки в поперечном направлении (направлении ширины полосы движения) и в направлении от встречного транспортного средства 64 так, чтобы находиться вдали от второй полосы движения L2. Другими словами, когда транспортные средства вынуждены двигаться по левой стороне, второе положение 93 остановки перемещается влево, чтобы определить третье положение 94 остановки. Когда транспортные средства вынуждены двигаться по правой стороне, второе положение 93 остановки перемещается вправо, чтобы определить третье положение 94 остановки.
[0082]
Блок 85 определения положения остановки определяет, может ли рассматриваемое транспортное средство 60, остановившееся в третьем положении 94 остановки, мешать области движения встречного транспортного средства 64.
Когда рассматриваемое транспортное средство 60, остановившееся в третьем положении 94 остановки, не мешает области движения встречного транспортного средства 64, блок 85 определения положения остановки определяет положение остановки рассматриваемого транспортного средства 60 как третье положение 94 остановки. Рассматриваемое транспортное средство 60 останавливается в третьем положении 94 остановки перед тем, как объехать первое препятствие 61, и ожидает завершения проезда встречного транспортного средства 64.
[0083]
Далее будет описан пример способа помощи при вождении согласно третьему варианту осуществления со ссылкой на блок-схему на фиг. 10. Обработка этапов S41-S47 такая же, как обработка этапов S1-S7, описанных со ссылкой на фиг. 6. Обработка этапов S51-S54 такая же, как обработка этапов S9-S12, описанных со ссылкой на фиг. 6.
[0084]
На этапе S47 блок 83 оценки траектории движения встречного транспортного средства оценивает область движения встречного транспортного средства 64, а затем блок 84 оценки помех определяет второе положение 93 остановки перед первым объектом 61 относительно продольного положения (т.е. положение направления движения) первого препятствия 61. На этапе S48 блок 84 оценки помех определяет, может ли рассматриваемое транспортное средство 60 мешать области движения встречного транспортного средства 64, когда рассматриваемое транспортное средство 60 останавливается во втором положении 93 остановки.
Когда рассматриваемое транспортное средство 60 остановилось во втором положении 93 остановки, оно может мешать области движения встречного транспортного средства 64 (этап S48: Y), обработка переходит к этапу S49. Когда рассматриваемое транспортное средство 60 остановилось во втором положении 93 остановки, оно не мешает области движения встречного транспортного средства 64 (этап S48: N), обработка переходит к этапу S52.
[0085]
На этапе S49 блок 85 определения положения остановки перемещает второе положение 93 остановки в поперечном направлении так, чтобы быть дальше от второй полосы L2 движения в направлении ширины полосы движения, чтобы определить третье положение 94 остановки.
Блок 85 определения положения остановки определяет, может ли рассматриваемое транспортное средство 60, остановившееся в третьем положении 94 остановки, мешать области движения встречного транспортного средства 64. Когда рассматриваемое транспортное средство 60 мешает области движения встречного транспортного средства 64 (этап S49: Y), обработка переходит к этапу S51. В этом случае блок 85 определения положения остановки определяет продольное положение первого положения 67 остановки относительно положения второго препятствия 62.
[0086]
Когда рассматриваемое транспортное средство 60 не мешает области движения встречного транспортного средства 64 (этап S49: N), обработка переходит к этапу S50.
На этапе S50 блок 85 определения положения остановки определяет, в качестве положения остановки рассматриваемого транспортного средства 60, третье положение 94 остановки, определяемое сдвигом второго положения 93 остановки в поперечном направлении так, чтобы оно находилось в стороне от второй полосы L2 движения. Затем обработка переходит к этапу S53.
[0087]
(Эффекты третьего варианта осуществления)
Блок 84 оценки помех определяет, может ли рассматриваемое транспортное средство 60 мешать области движения встречного транспортного средства 64, которое избегает второе препятствие 62, когда рассматриваемое транспортное средство 60 останавливается во втором положении 93 остановки перед первым препятствием 61. Когда рассматриваемое транспортное средство 60, остановившееся во втором положении 93 остановки, может мешать области движения встречного транспортного средства 64, блок 85 определения положения остановки перемещает второе положение 93 остановки в поперечном направлении, чтобы быть дальше от второй полосы L2 движения в направлении ширины полосы движения, тем самым определяя третье положение 94 остановки. Когда рассматриваемое транспортное средство 60, остановившееся в третьем положении 94 остановки, не мешает области движения встречного транспортного средства 64, блок 85 определения положения остановки определяет положение остановки рассматриваемого транспортного средства 60 как третье положение 94 остановки.
В результате, хотя рассматриваемое транспортное средство 60 может быть остановлено в положении, где рассматриваемое транспортное средство 60 не мешает движению встречного транспортного средства 64, рассматриваемое транспортное средство 60 может быть продвинуто в положение рядом с первым препятствием 61 перед прохождением Встречное транспортное средство 64. Таким образом, рассматриваемое транспортное средство 60 может быстрее избежать первого препятствия 61.
[0088]
Все примеры и условные формулировки, представленные в данном документе, предназначены для педагогических целей, чтобы помочь читателю понять изобретение и концепции, внесенные изобретателем в развитие данной области техники, и они не должны рассматриваться как ограничения такими конкретно перечисленными примерами и условиями, а организация таких примеров в описании не связана с демонстрацией превосходства или неполноценности данного изобретения. Хотя один или несколько вариантов осуществления настоящего изобретения были описаны подробно, следует понимать, что в изобретение могут быть внесены различные изменения, замены и модификации, не выходящие за рамки сущности и объема данного изобретения.
СПИСОК ПОЗИЦИОННЫХ ОБОЗНАЧЕНИЙ
[0089]
1: Устройство помощи при вождении
2: Устройство формирования траектории движения
10: Группа датчиков окружения
11: Дальномер
12: Камера
20: Навигационная система
21: Контроллер навигации
22: Устройство позиционирования
23: Картографическая база данных
24: Блок отображения
25: Операционный блок
26: Блок вывода звука
27: Блок связи
30: Группа датчиков транспортного средства
31: Датчик скорости транспортного средства
32: Датчик ускорения
33: Гироскопический датчик
34: Датчик угла поворота рулевого колеса
35: Датчик акселератора
36: Датчик тормоза
40: контроллер
41: Процессор
42: Запоминающее устройство
50: Устройство управления движением
51: Группа исполнительных механизмов
52: Исполнительный механизм рулевого управления
53: Исполнительный механизм положения акселератора
54: Исполнительный механизм управления тормозом
60: Рассматриваемое транспортное средство
L1: Первая полоса движения
61: Первое препятствие
L2: Встречная полоса движения
62: Второе препятствие
64: Встречное транспортное средство
80: Первый блок обнаружения препятствий
81: Блок обнаружения встречного транспортного средства
82: Второй блок обнаружения препятствий
83: Блок оценки траектории движения встречного транспортного средства
84: Блок оценки помех
85: Блок определения положения остановки
86: Блок формирования траектории





Группа изобретений относится к способу и устройству помощи при вождении. Устройство содержит: датчик, контроллер, устройство управления движением. Датчик обнаруживает положение первого препятствия впереди рассматриваемого транспортного средства на первой полосе движения, по которой движется рассматриваемое транспортное средство. Определяет положения второго препятствия впереди рассматриваемого транспортного средства на второй полосе движения. При этом вторая полоса движения является встречной полосой движения, смежной с первой полосой движения. Контроллер определяет, находится ли положение второго препятствия на более близкой стороне, чем положение первого препятствия в направлении движения рассматриваемого транспортного средства, и может ли рассматриваемое транспортное средство при остановке перед первым препятствием помешать движению встречного транспортного средства. Когда положение второго препятствия находится на более близкой стороне, чем положение первого препятствия в направлении движения рассматриваемого транспортного средства, и рассматриваемое транспортное средство, при остановке перед первым препятствием, может помешать движению встречного транспортного средства, контроллер определяет положение остановки в качестве положения остановки рассматриваемого транспортного средства как положение перед вторым препятствием в направлении движения рассматриваемого транспортного средства относительно второго препятствия. Устройство управления движением выполнено с возможностью оказания помощи при вождении на основе определенного положения остановки. Достигается создание системы, позволяющей предотвратить препятствование рассматриваемого транспортного средства движению встречного транспортного средства. 2 н. и 9 з.п. ф-лы, 12 ил. 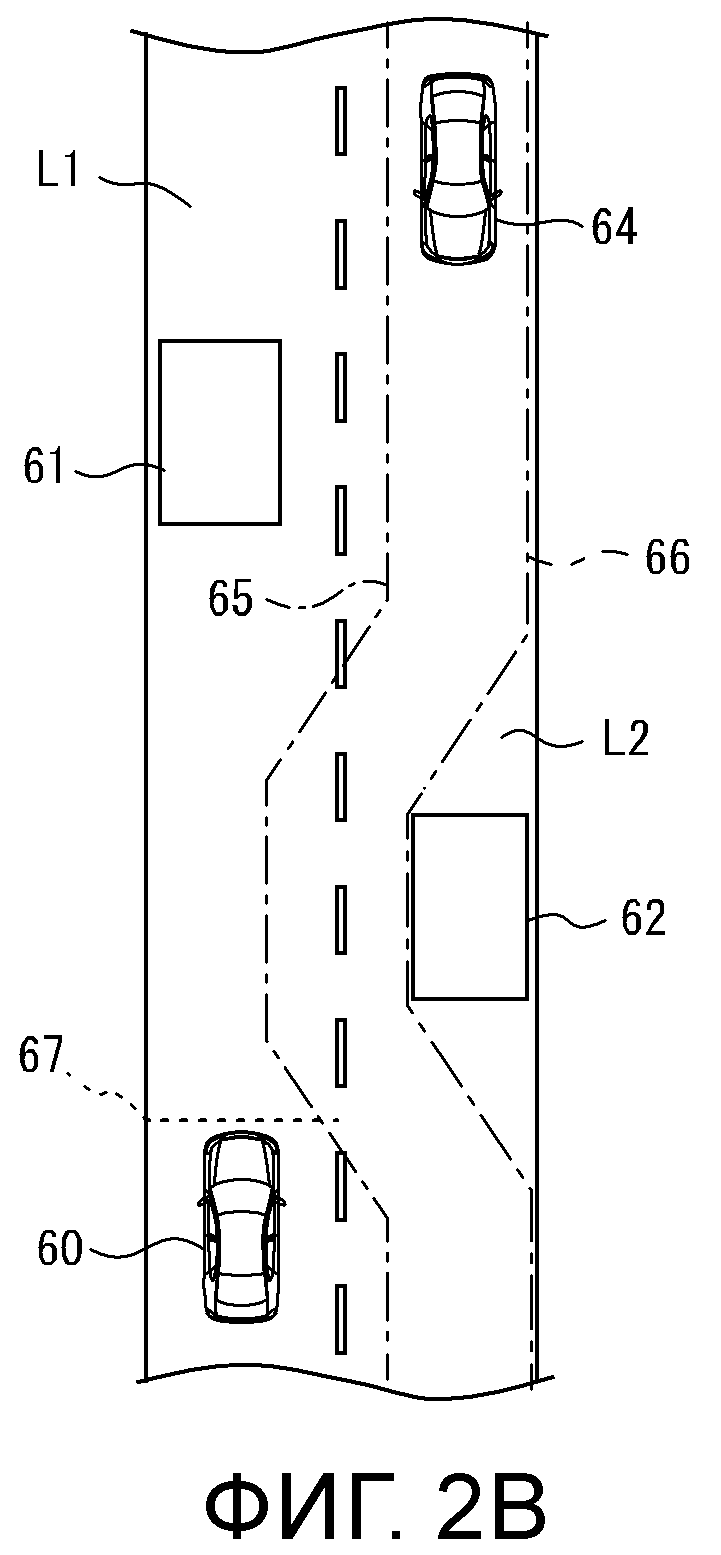
1. Способ помощи при вождении, содержащий этапы, на которых:
обнаруживают положение первого препятствия впереди рассматриваемого транспортного средства на первой полосе движения, по которой движется рассматриваемое транспортное средство;
обнаруживают положение второго препятствия впереди рассматриваемого транспортного средства на второй полосе движения, причем вторая полоса движения является встречной полосой движения, смежной с первой полосой движения;
определяют, находится ли положение второго препятствия на более близкой стороне, чем положение первого препятствия в направлении движения рассматриваемого транспортного средства, и может ли рассматриваемое транспортное средство, при остановке перед первым препятствием, помешать движению встречного транспортного средства;
когда положение второго препятствия находится на более близкой стороне, чем положение первого препятствия в направлении движения рассматриваемого транспортного средства, и рассматриваемое транспортное средство, при остановке перед первым препятствием, может помешать движению встречного транспортного средства, определяют положение остановки в качестве положения остановки рассматриваемого транспортного средства как положение перед вторым препятствием в направлении движения рассматриваемого транспортного средства относительно второго препятствия; и
помогают рассматриваемому транспортному средству в остановке в определенном положении остановки.
2. Способ помощи при вождении по п.1, в котором,
когда положение второго препятствия не находится на более близкой стороне, чем положение первого препятствия в направлении движения рассматриваемого транспортного средства, или рассматриваемое транспортное средство, при остановке перед первым препятствием, не может помешать движению встречного транспортного средства, определяют положение остановки в качестве положения остановки рассматриваемого транспортного средства как положение перед первым препятствием в направлении движения рассматриваемого транспортного средства относительно первого препятствия.
3. Способ помощи при вождении по п.2, содержащий этап, на котором оценивают область движения встречного транспортного средства и оценивают возможность того, что рассматриваемое транспортное средство будет мешать движению встречного транспортного средства, в зависимости от того, перекрывает ли расчетная область движения встречного транспортного средства область, занятую рассматриваемым транспортным средством при остановке перед первым препятствием.
4. Способ помощи при вождении по п.3, содержащий этап, на котором оценивают уровень навыков вождения встречного транспортного средства и оценивают область движения в соответствии с уровнем навыков вождения.
5. Способ помощи при вождении по любому из пп.2-4, содержащий этап, на котором оценивают размер встречного транспортного средства, при этом, когда размер встречного транспортного средства превышает пороговое значение, первое положение остановки устанавливают на более близкой стороне в направлении движения рассматриваемого транспортного средства относительно второго препятствия, чем когда размер встречного транспортного средства не превышает пороговое значение.
6. Способ помощи при вождении по любому из пп.2-5, в котором, даже когда положение второго препятствия находится на более близкой стороне, чем положение первого препятствия, в направлении движения рассматриваемого транспортного средства, и существует возможность что рассматриваемое транспортное средство при остановке во втором положении остановки перед первым препятствием будет мешать движению встречного транспортного средства, при этом рассматриваемое транспортное средство, при остановке в третьем положении остановки, определяемом сдвигом второго положения остановки в поперечном направлении таким образом, чтобы находиться вдали от второй полосы движения в направлении ширины полосы движения, не будет мешать движению встречного транспортного средства, положение остановки рассматриваемого транспортного средства определяют как третье положение остановки.
7. Способ помощи при вождении по любому из пп.1-6, в котором, когда положение второго препятствия находится впереди положения первого препятствия в направлении движения рассматриваемого транспортного средства, положение остановки рассматриваемого транспортного средства определяют относительно положения первого препятствия.
8. Устройство помощи при вождении, содержащее:
датчик, выполненный с возможностью обнаружения положения первого препятствия впереди рассматриваемого транспортного средства на первой полосе движения, по которой движется рассматриваемое транспортное средство, и обнаружения положения второго препятствия впереди рассматриваемого транспортного средства на второй полосе движения, при этом вторая полоса движения является встречной полосой движения, смежной с первой полосой движения;
контроллер, выполненный с возможностью:
определять, находится ли положение второго препятствия на более близкой стороне, чем положение первого препятствия в направлении движения рассматриваемого транспортного средства, и может ли рассматриваемое транспортное средство, при остановке перед первым препятствием, помешать движению встречного транспортного средства;
когда положение второго препятствия находится на более близкой стороне, чем положение первого препятствия в направлении движения рассматриваемого транспортного средства, и рассматриваемое транспортное средство, при остановке перед первым препятствием, может помешать движению встречного транспортного средства, определять положение остановки в качестве положения остановки рассматриваемого транспортного средства как положение перед вторым препятствием в направлении движения рассматриваемого транспортного средства относительно второго препятствия; и
устройство управления движением, выполненное с возможностью оказания помощи при вождении на основе определенного положения остановки.
9. Устройство помощи при вождении по п.8, в котором контроллер выполнен с возможностью, когда положение второго препятствия не находится на более близкой стороне, чем положение первого препятствия в направлении движения рассматриваемого транспортного средства, или рассматриваемое транспортное средство, при остановке перед первым препятствием, не может помешать движению встречного транспортного средства, определять положение остановки в качестве положения остановки рассматриваемого транспортного средства как положение перед первым препятствием в направлении движения рассматриваемого транспортного средства относительно первого препятствия.
10. Способ помощи при вождении по п.2, в котором,
когда положение второго препятствия находится на более близкой стороне, чем положение первого препятствия в направлении движения рассматриваемого транспортного средства, и рассматриваемое транспортное средство, при остановке перед первым препятствием, не может помешать движению встречного транспортного средства, определяют положение остановки рассматриваемого транспортного средства как положение перед первым препятствием и впереди второго препятствия в направлении движения рассматриваемого транспортного средства.
11. Устройство помощи при вождении по п.9, в котором, когда положение второго препятствия находится на более близкой стороне, чем положение первого препятствия в направлении движения рассматриваемого транспортного средства, и рассматриваемое транспортное средство, при остановке перед первым препятствием, не может помешать движению встречного транспортного средства, положение остановки рассматриваемого транспортного средства определяется как положение перед первым препятствием и впереди второго препятствия в направлении движения рассматриваемого транспортного средства.
| US 2015224988 Al, 13.08.2015 | |||
| JP 2008174023 A, 31.07.2008 | |||
| DE 102016203086 Al, 31.08.2017 | |||
| DE 102016221905 Al, 09.05.2018. |

