Изобретение относится к области приборостроения, в частности к испытательному оборудованию, и может быть использовано для оценки амплитудно-частотной характеристики (АЧХ) системы коррекции магнитных компасов (далее – МК), при их испытаниях.
Известен класс устройств – качающейся платформы с одной или несколькими степенями свободы, позволяющие воспроизводить угловые колебания и предназначенные для оценки погрешностей гироскопических приборов [Д. М. Калихман. Прецизионные управляемые стенды для динамических испытаний гироскопических приборов // СПб.: ГНЦ РФ ЦНИИ "Электроприбор", 2008].
Наиболее близким по технической сущности является стенд угловых колебаний, предназначенный для градуирования, калибровки и проверки датчиков угловых скоростей и ускорений [авторское свидетельство СССР № 1752446], имеющий одну вращательную степень свободы и воспроизводящий угловые колебания, закон изменения которых близок к закону углового рыскания объекта.
Данное устройство принято за прототип предлагаемого изобретения.
К недостаткам прототипа, не позволяющим его использовать для оценки АЧХ систем коррекции МК, описанных, например, в [патент РФ № 2688900], относится невозможность выработки дополнительного к существующему на данной широте магнитного момента на картушке компаса, характеризующего изменение креновой погрешности МК, вызванной качкой объекта.
Решаемая техническая проблема – совершенствование стендового оборудования, позволяющего оценить АЧХ системы коррекции МК.
Достигаемый технический результат – оценка степени подавления дополнительной погрешности МК, вызванной рысканием объекта с разной частотой, с помощью системы коррекции МК, характеризуемой её АЧХ.
Технический результат достигается использованием специализированного одноосного стенда с вертикальной осью вращения, состоящего из привода переменного тока, платформы для монтажа котелка МК и двух постоянных магнитов, расположенных на некотором расстоянии от оси вращения.
Сущность предлагаемого изобретения состоит в том, что в одноосном стенде для оценки АЧХ системы коррекции МК, состоящим из платформы, которая воспроизводит углы рыскания и на которую устанавливается котелок МК с датчиком угла разворота картушки с магнитной системой, ось разворота картушки с магнитной системой МК расположена на плече относительно оси вращения платформы таким образом, что при развороте платформы котелок приближается к одному из двух постоянных магнитов, закреплённого неподвижно и прикладывающего дополнительный магнитный момент к магнитной системе картушки МК. Это приводит к её дополнительному развороту, имитирующему влияние креновой погрешности, что позволяет при дальнейшей обработке информации от датчика угла стенда и датчика угла разворота картушки МК оценить АЧХ системы коррекции, компенсирующей дополнительную погрешность МК, вызванной качкой.
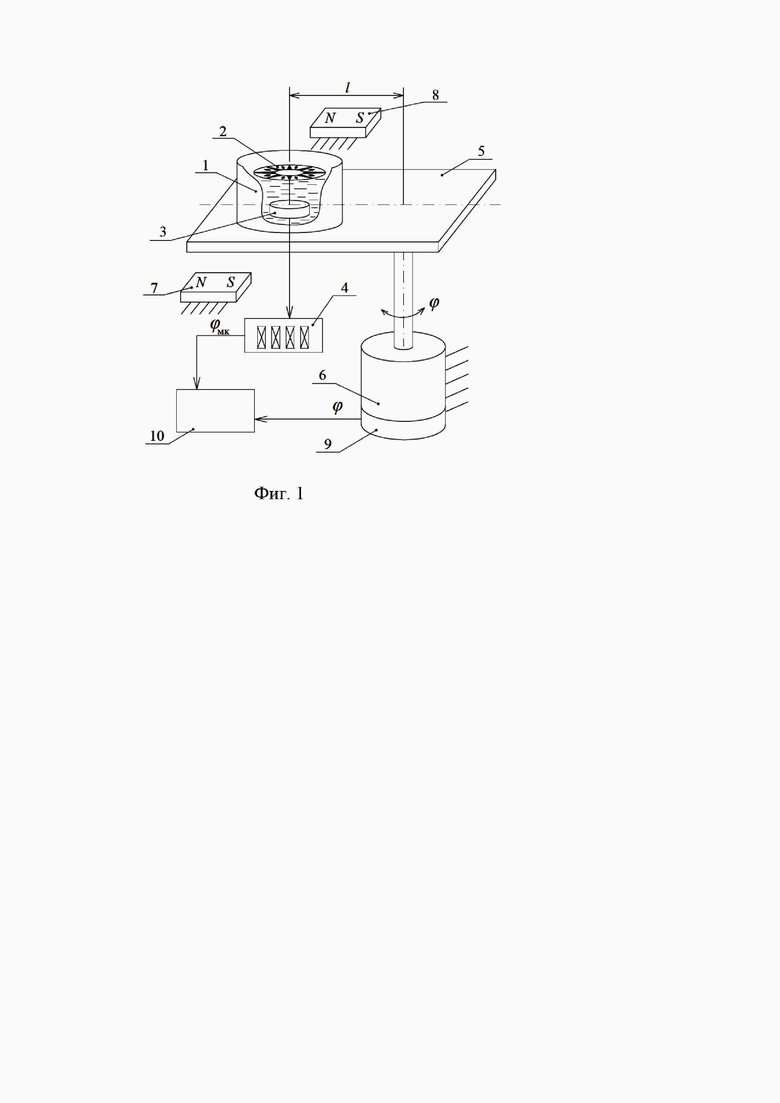
На фиг. 1 представлены одноосный стенд с установленным на нем МК, состоящим из котелка с чувствительной подвижной магнитной системой (далее – магнитная система), установленной на картушке. На фиг. 1 приведены обозначения:
1 – котелок МК,
2 – картушка МК с чувствительной подвижной магнитной системой,
3 – датчик угла картушки,
4 – прибор управления МК,
5 – платформа одноосного стенда,
6 – привод переменного тока,
7, 8 – постоянные магниты,
9 – датчик угла одноосного стенда,
10 – персональный компьютер,
ϕ – угол рыскания стенда,
ϕМК – сигнал МК на выходе системы коррекции прибора управления МК.
Функционирование предлагаемого стенда осуществляется следующим образом.
Угол поворота картушки 2 измеряется датчиком угла 3 картушки и передаётся на прибор управления 4, реализующий систему коррекции, подавляющую погрешность вызванную качкой объекта, например, из [патент РФ №2688900] и оснащённый индикатором откорректированного курса (на фиг.1 не приведен). Стенд состоит из платформы 5, совершающей угловые колебания с частотой рыскания, задаваемые с помощью привода переменного тока 6. На платформе 5 на некотором плече l, относительно оси вращения платформы 5, установлен котелок 1. При этом на неподвижной части стенда установлены постоянные магниты 7 и 8, которые формируют на чувствительной подвижной магнитной системе картушки 2 дополнительный магнитный момент, имитирующий изменяющуюся креновую погрешность МК, обусловленную его качкой.
При развороте стенда на угол рыскания ϕ, измеряемый датчиком угла стенда 9, котелок 1 приближается к одному из постоянных магнитов, в результате чего чувствительная подвижная магнитная система картушки 2 разворачивается на угол
ϕК = ϕ + Δϕ, где Δϕ – угол отклонения магнитной системы, обусловленный действием постоянных магнитов 7 и 8 и пропорциональный погрешности МК от качки. В том случае, если задать изменение углов рыскания ϕ стенда с частотой ω, то при угловых колебаниях стенда датчик угла 3 картушки будет вырабатывать сигнал ϕК(ω) с дополнительно сформированной погрешностью Δϕ(ω), возникающей из-за качки судна на заданной частоте. При этом значение этой погрешности в зависимости от частоты Δϕ(ω) = ϕК(ω) – ϕ(ω), где ϕК(ω) – угол разворота картушки МК в зависимости от частот, ϕ(ω) – угол рыскания стенда на последовательно задаваемых частотах, получаемые с персонального компьютера. АЧХ системы коррекции магнитного компаса 
Экспериментальные исследования устройства производились с использованием МК "Азимут КМ-05Д", котелок которого был установлен на платформу одноосного стенда. При воспроизведении стендом углов рыскания с амплитудой 10º в диапазоне периодов
от 3 до 140 секунд значение характеристики 
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения динамической погрешности магнитного компаса с системой коррекции от качки и устройство для его реализации | 2022 |
|
RU2783479C1 |
| Способ определения динамической погрешности магнитного компаса, вызванной качкой, и устройство для его реализации | 2019 |
|
RU2718691C1 |
| Способ измерения магнитного курса судна с использованием системы коррекции | 2023 |
|
RU2804444C1 |
| Способ измерения магнитного курса судна в высоких широтах и устройство для его реализации | 2018 |
|
RU2688900C1 |
| Способ коррекции магнитного курса судна | 2024 |
|
RU2839828C1 |
| Способ измерения магнитного курса судна в высоких широтах | 2021 |
|
RU2763685C1 |
| МАГНИТНЫЙ КОМПАС | 1999 |
|
RU2161776C2 |
| МАГНИТНЫЙ КОМПАС С ДИСТАНЦИОННОЙ ТЕЛЕМЕТРИЧЕСКОЙ ПЕРЕДАЧЕЙ ИЗОБРАЖЕНИЯ ШКАЛЫ КУРСА | 2010 |
|
RU2441201C1 |
| СПОСОБ УНИЧТОЖЕНИЯ ПОЛУКРУГОВОЙ ДЕВИАЦИИ НА ОДНОМ МАГНИТНОМ КУРСЕ | 2010 |
|
RU2442961C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЯ УГЛОВЫХ СКОРОСТЕЙ | 1995 |
|
RU2115129C1 |
Изобретение относится к области приборостроения. Одноосный стенд для оценки амплитудно-частотной характеристики (АЧХ) системы коррекции магнитного компаса (МК) характеризуется тем, что ось разворота картушки МК расположена на плече относительно оси вращения платформы таким образом, что при развороте платформы котелок приближается к одному из двух постоянных магнитов, при этом каждый из которых закреплён неподвижно и прикладывает дополнительный магнитный момент к магнитной системе картушки МК, что приводит к её дополнительному развороту, пропорциональному креновой погрешности, по информации от датчика угла стенда и датчика угла разворота картушки МК, при колебаниях рыскания на задаваемых частотах, осуществляется расчёт АЧХ системы коррекции, компенсирующей дополнительную погрешность МК, вызванную качкой. Технический результат – оценка степени подавления дополнительной погрешности МК, вызванной рысканием объекта с разной частотой, с помощью системы коррекции МК, характеризуемой её АЧХ. 1 ил.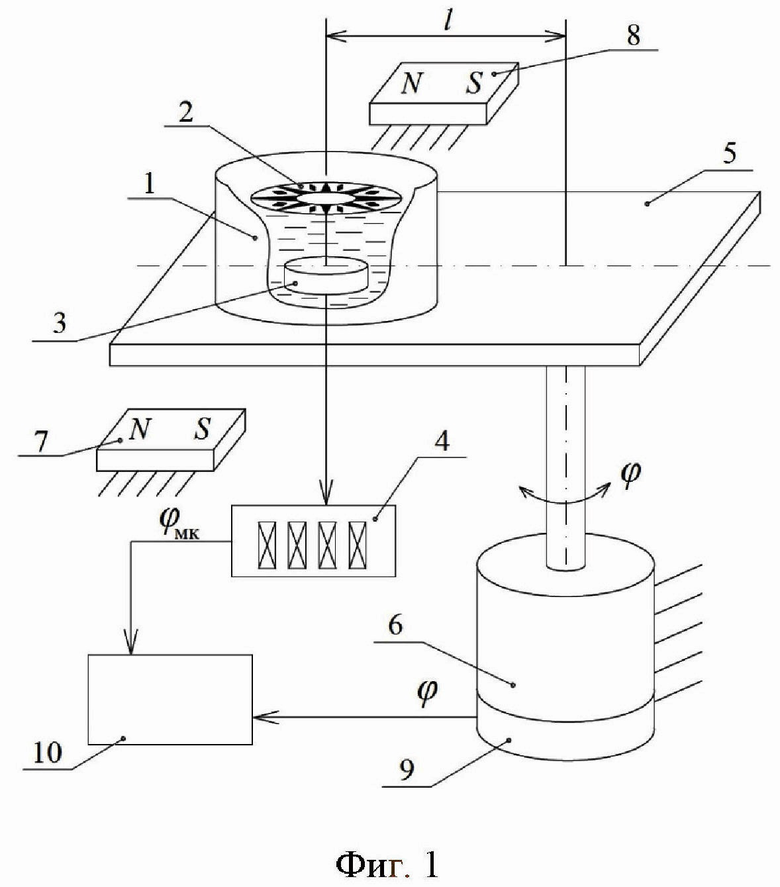
Одноосный стенд для оценки амплитудно-частотной характеристики (АЧХ) системы коррекции магнитного компаса (МК), содержащий платформу, которая воспроизводит углы рыскания на задаваемых последовательно частотах и на которую устанавливается котелок МК с датчиком угла разворота картушки с магнитной системой, отличающийся тем, что ось разворота картушки МК расположена на плече относительно оси вращения платформы таким образом, что при развороте платформы котелок приближается к одному из двух постоянных магнитов, при этом каждый из которых закреплён неподвижно и прикладывает дополнительный магнитный момент к магнитной системе картушки МК, что приводит к её дополнительному развороту, пропорциональному креновой погрешности, по информации от датчика угла стенда и датчика угла разворота картушки МК, при колебаниях рыскания на задаваемых частотах, осуществляется расчёт АЧХ системы коррекции, компенсирующей дополнительную погрешность МК, вызванную качкой.
| Стенд угловых колебаний | 1990 |
|
SU1752446A1 |
| Способ определения динамической погрешности магнитного компаса, вызванной качкой, и устройство для его реализации | 2019 |
|
RU2718691C1 |
| КОАКСИАЛЬНЫЙ СОЕДИНИТЕЛЬ | 0 |
|
SU231635A1 |
| US 3597089 A, 03.08.1971. | |||

