Изобретение относится к области навигационного приборостроения и может быть использовано как в обычных, так и в высокоширотных главных судовых магнитных компасах, оборудованных устройствами дистанционной передачи информации о курсе.
Известны дистанционные магнитные компасы (далее - МК), содержащие корпус, заполненный демпфирующей жидкостью; картушку с магнитным чувствительным элементом (далее - МЧЭ), установленную на опоре; индукционный преобразователь, размещенный в магнитном поле МЧЭ; девиационный прибор, содержащий компенсатор полукруговой девиации компаса, и электромеханическую дистанционную передачу, например, магнитные компасы "Сектор" [Кожухов В.П., Воронов В.В., Григорьев В.В. Магнитные компасы // М.: Транспорт, 1981, стр.173-180] и КМ145-С [Кардашинский-Брауде Л.А. Современные судовые магнитные компасы //СПб.: ГНЦ РФ «ЦНИИ «Электроприбор», 1999, стр.60-62].
К недостаткам способа измерения магнитного курса, реализуемого в этих МК, относится то, что в условиях плавания судна появляется динамическая погрешность компаса, обусловленная, прежде всего, воздействием на картушку с МЧЭ центростремительного и тангенциального ускорения от воздействия качки [Рыбалтовский Н.Ю. Магнитно-компасное дело // Л.: Государственное издательство водного транспорта, 1954, стр. 441]. Эта совокупность ускорений, которую называют переносными [Ривкин С.С. Определение линейных скоростей и ускорений качки корабля инерциальным методом. Часть I. Линейные скорости и ускорения качки корабля // Л.: ЦНИИ «Румб», 1980, стр.19], обусловлена тем, что компас установлен на некотором плече относительно центра качания судна. Поскольку картушка МК имеет свойства короткопериодного маятника, она отклоняется от горизонтального положения под воздействием этих ускорений, что вызывает появление в плоскости диска картушки проекции вертикальной составляющей земного магнетизма, приводящей к динамической погрешности МК. Особенно велико значение динамической погрешности при плавании в высоких широтах, так как горизонтальная составляющая магнитного поля Земли там незначительна.
За прототип способа принято техническое решение, приведенное в [патент РФ №2804444], в котором с целью подавления динамической погрешности, возникающей при воздействии качки, применяется система коррекции, использующая микромеханический датчик угловой скорости (далее - ММГ) с вертикально расположенной осью чувствительности, установленный на котелке МК. Работа системы коррекции основана на применении в схеме измерения МК простого и легкореализуемого комплементарного фильтра, позволяющего получить значение угла курса с помощью комплексирования показаний двух различных датчиков - датчика магнитного курса (далее - ДМК) компаса и ММГ. В приведенном прототипе с целью уменьшения динамической погрешности от качки судна показания ММГ и ДМК объединяются при помощи фильтра верхних частот (далее - ФВЧ) и фильтра нижних частот (далее - ФНЧ) так, чтобы на выходе схемы измерения формировался угол курса, представляющий комбинацию низкочастотной и высокочастотной составляющих, соответственно, ДМК и ММГ. Работа такого комплементарного фильтра основана на использовании принципа инвариантности, заключающегося в равенстве суммы передаточных функций ФВЧ и ФНЧ единице, в этом случае применяемые в схеме ФВЧ и ФНЧ не оказывают влияния на вырабатываемый МК угол курса. В прототипе в качестве ФВЧ и ФНЧ используются соответствующие динамические звенья с передаточными функциями  и
и  , где
, где  - постоянная времени ФВЧ,
- постоянная времени ФВЧ,  - постоянная времени ФНЧ, p =
- постоянная времени ФНЧ, p =  оператор дифференцирования. Равенство суммы передаточных функций ФВЧ и ФНЧ единице достигается при условии равенства постоянных времени
оператор дифференцирования. Равенство суммы передаточных функций ФВЧ и ФНЧ единице достигается при условии равенства постоянных времени  =
= =
= .
.
Как описано в прототипе, для того, чтобы на выходе схемы измерения формировался оптимальный угол курса по показаниям ДМК и ММГ, необходимо чтобы сигнал ММГ был вначале проинтегрирован, т.е. пропущен через звено  , и только потом к полученному выходному сигналу интегратора может быть применен ФВЧ -
, и только потом к полученному выходному сигналу интегратора может быть применен ФВЧ -  . Поскольку в результате такого последовательного соединения динамических звеньев
. Поскольку в результате такого последовательного соединения динамических звеньев  образуется передаточная функция -
образуется передаточная функция -  , то выходной сигнал ММГ может непосредственно пропускаться через усилитель с коэффициентом усиления
, то выходной сигнал ММГ может непосредственно пропускаться через усилитель с коэффициентом усиления  и далее подаваться, также как и выходной сигнал ДМК, на вход апериодического звена
и далее подаваться, также как и выходной сигнал ДМК, на вход апериодического звена  . В этом случае, можно говорить о том, что применяемый комплементарный фильтр настроен на постоянную времени
. В этом случае, можно говорить о том, что применяемый комплементарный фильтр настроен на постоянную времени  .
.
К недостатку прототипа относится то, что эффективность подавления динамической погрешности МК при применении рассматриваемого комплементарного фильтра, настроенного на значение постоянной времени  , зависит от периода качки судна. Обеспечить одинаково высокое значение эффективности для всего диапазона периодов качки не представляется возможным, поскольку постоянная времени фильтра выбирается на основе соотношения погрешностей ДМК и ММГ, которое не является постоянным, а меняется в зависимости от периода качки. Поскольку наибольшее влияние на погрешность ДМК оказывает тангенциальное ускорение, пропорциональное значению
, зависит от периода качки судна. Обеспечить одинаково высокое значение эффективности для всего диапазона периодов качки не представляется возможным, поскольку постоянная времени фильтра выбирается на основе соотношения погрешностей ДМК и ММГ, которое не является постоянным, а меняется в зависимости от периода качки. Поскольку наибольшее влияние на погрешность ДМК оказывает тангенциальное ускорение, пропорциональное значению  , где
, где  - период гармонической качки, то с увеличением периода качки, значение погрешности ДМК снижается.
- период гармонической качки, то с увеличением периода качки, значение погрешности ДМК снижается.
Увеличение постоянной времени комплементарного фильтра  приводит к повышению влияния погрешности ММГ на погрешность оценки выходного сигнала фильтра, поэтому в качестве основного значения постоянной времени фильтра, полученного с использованием лабораторных исследований, выбирается значение
приводит к повышению влияния погрешности ММГ на погрешность оценки выходного сигнала фильтра, поэтому в качестве основного значения постоянной времени фильтра, полученного с использованием лабораторных исследований, выбирается значение  . При таком значении фильтр эффективно справляется с погрешностями ДМК, проявляющимися при условии действия качки с периодами
. При таком значении фильтр эффективно справляется с погрешностями ДМК, проявляющимися при условии действия качки с периодами 
 10 c., но менее эффективно - с погрешностями ДМК, проявляющимися при действии качки с периодами < 10 c.
10 c., но менее эффективно - с погрешностями ДМК, проявляющимися при действии качки с периодами < 10 c.
Решаемая техническая проблема - разработка способа компенсации динамической погрешности МК, обеспечивающего высокую эффективность подавления данной погрешности во всем диапазоне периодов качки путем применения в схеме измерения МК вместо одного комплементарного фильтра с постоянной времени  двух параллельных комплементарных фильтров с постоянными времени соответственно
двух параллельных комплементарных фильтров с постоянными времени соответственно  и
и  .
.
Первый фильтр имеет постоянную времени  10 с и использование этого фильтра позволяет эффективно снизить динамическую погрешность МК для периодов качки 10 c.
10 с и использование этого фильтра позволяет эффективно снизить динамическую погрешность МК для периодов качки 10 c.
Второй фильтр имеет постоянную времени  = 30 с и применение этого фильтра позволяет эффективно снизить динамическую погрешность МК для периодов качки, находящихся в диапазоне < 10 c.
= 30 с и применение этого фильтра позволяет эффективно снизить динамическую погрешность МК для периодов качки, находящихся в диапазоне < 10 c.
Достигаемый технический результат - повышения точности измерения курса МК во всем диапазоне периодов качки судна.
Решение о применении двух постоянно работающих комплементарных фильтров с настройкой на постоянные времени  и
и  вместо применения одного фильтра, значение постоянной времени которого в процессе работы можно изменить с постоянной времени
вместо применения одного фильтра, значение постоянной времени которого в процессе работы можно изменить с постоянной времени  на постоянную времени , связано с необходимостью предотвращения возникновения переходного процесса в фильтре при изменении его параметров. Переходный процесс не возникает при использовании двух параллельных комплементарных фильтров с настройкой на постоянные времени
на постоянную времени , связано с необходимостью предотвращения возникновения переходного процесса в фильтре при изменении его параметров. Переходный процесс не возникает при использовании двух параллельных комплементарных фильтров с настройкой на постоянные времени  и .
и .
Для выполнения принципа инвариантности при реализации двух комплементарных фильтров и обеспечения функционирования предлагаемой системы коррекции МК в схему вводятся (см. фиг.):
- четыре дополнительных усилителя: два усилителя сигнала ДМК с коэффициентами усиления  и
и  , и два усилителя сигнала ММГ с коэффициентом усиления
, и два усилителя сигнала ММГ с коэффициентом усиления  и
и  , выходные данные с которых поступают в вычислительное устройство МК;
, выходные данные с которых поступают в вычислительное устройство МК;
- блок формирования выходного сигнала МК для формирования по данным двух фильтров единственного текущего значения выходного сигнала МК  , который далее транслируется на выносной индикатор. Для работы блока формирования выходного сигнала МК требуется информация о текущем значении периода качки
, который далее транслируется на выносной индикатор. Для работы блока формирования выходного сигнала МК требуется информация о текущем значении периода качки  , которое может быть выработано судовым электронным кренометром или электронным кренодифферентометром, входящим в состав оборудования судна.
, которое может быть выработано судовым электронным кренометром или электронным кренодифферентометром, входящим в состав оборудования судна.
На фиг. показана блок-схема выработки измерительных сигналов и их обработки в вычислительном устройстве МК с использованием двух комплементарных фильтров, на выходе каждого из которых формируется свое значение выходного сигнала угла курса и рыскания в соответствии с предлагаемым способом, где:
 - магнитный курс,
- магнитный курс,
 - угол рыскания,
- угол рыскания,
 - постоянная времени первого комплементарного фильтра,
- постоянная времени первого комплементарного фильтра,
 - постоянная времени второго комплементарного фильтра,
- постоянная времени второго комплементарного фильтра,
 - коэффициенты усиления сигнала ДМК,
- коэффициенты усиления сигнала ДМК,
 - коэффициенты усиления сигнала ММГ.
- коэффициенты усиления сигнала ММГ.
Последовательность действий при реализации предлагаемого способа:
1. Выходной сигнал с ДМК поступает на два усилителя с коэффициентами усиления  и
и  , а выходной сигнал с ММГ поступает на два усилителя с коэффициентами усиления
, а выходной сигнал с ММГ поступает на два усилителя с коэффициентами усиления  и
и  .
.
2. Сигнал с усилителя ДМК  суммируется с сигналом с усилителя ММГ -
суммируется с сигналом с усилителя ММГ -  . Полученная сумма сигналов подается на вход апериодического звена
. Полученная сумма сигналов подается на вход апериодического звена  с постоянной времени
с постоянной времени  , а на выходе этого звена формируется первое значение выходного сигнала угла курса и рыскания ,
, а на выходе этого звена формируется первое значение выходного сигнала угла курса и рыскания ,
3. Сигнал с усилителя ДМК  суммируется с сигналом с усилителя ММГ -
суммируется с сигналом с усилителя ММГ -  . Полученная сумма сигналов подается на вход апериодического звена
. Полученная сумма сигналов подается на вход апериодического звена  с постоянной времени
с постоянной времени  , а на выходе этого звена формируется второе значение выходного сигнала угла курса и рыскания
, а на выходе этого звена формируется второе значение выходного сигнала угла курса и рыскания
4. Оба выходных сигнала угла курса и рыскания подаются в блок формирования выходного сигнала МК. В этот же блок подается текущее значение периода качки , выработанное судовым электронным кренометром или кренодифферентометром.
5. Блок формирования выходного сигнала МК функционирует следующим образом:
- если текущее значение периода качки находится в диапазоне  , то на выход этого блока поступает сигнал с выхода апериодического звена
, то на выход этого блока поступает сигнал с выхода апериодического звена  ;
;
- если текущее значение периода качки находится в диапазоне  , то на выход этого блока поступает сигнал с выхода апериодического звена
, то на выход этого блока поступает сигнал с выхода апериодического звена  .
.
6. Сигнал с выхода блока формирования выходного сигнала МК (текущее значение угла курса магнитного компаса) подается на выносной индикатор.
Было проведено компьютерное (имитационное) моделирование работы МК с предлагаемой системой коррекции, в которой применялись два параллельных комплементарных фильтра с постоянными времени  =10 с и
=10 с и  = 30 с, а выбор текущего значения угла курса и рыскания МК с одного из выходов этих фильтров производился на основе информации о значении периода качки для диапазона 3с…30 с, вырабатываемого судовым электронным кренометром типа «Гиромастер ЭК 03». Результаты этого моделирования подтверждают возможность обеспечения снижения динамической погрешности магнитного компаса в 8-10 раз во всем диапазоне периодов качки.
= 30 с, а выбор текущего значения угла курса и рыскания МК с одного из выходов этих фильтров производился на основе информации о значении периода качки для диапазона 3с…30 с, вырабатываемого судовым электронным кренометром типа «Гиромастер ЭК 03». Результаты этого моделирования подтверждают возможность обеспечения снижения динамической погрешности магнитного компаса в 8-10 раз во всем диапазоне периодов качки.
Таким образом, заявленный технический результат считается достигнутым.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения магнитного курса судна с использованием системы коррекции | 2023 |
|
RU2804444C1 |
| Способ измерения магнитного курса судна в высоких широтах | 2021 |
|
RU2763685C1 |
| Способ измерения магнитного курса судна в высоких широтах и устройство для его реализации | 2018 |
|
RU2688900C1 |
| Судовой электронный кренодифферентометр | 2023 |
|
RU2817308C1 |
| Способ определения динамической погрешности магнитного компаса с системой коррекции от качки и устройство для его реализации | 2022 |
|
RU2783479C1 |
| Одноосный стенд для оценки амплитудно-частотной характеристики системы коррекции магнитного компаса | 2021 |
|
RU2757536C1 |
| СИСТЕМА КОРРЕКЦИИ ГИРОСТАБИЛИЗАТОРА МОРСКОГО ГРАВИМЕТРА | 2007 |
|
RU2332642C1 |
| ИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА ОРИЕНТАЦИИ И НАВИГАЦИИ ДЛЯ МОРСКИХ ОБЪЕКТОВ | 2013 |
|
RU2523670C1 |
| Способ определения динамической погрешности магнитного компаса, вызванной качкой, и устройство для его реализации | 2019 |
|
RU2718691C1 |
| МАГНИТНЫЙ КОМПАС С ДИСТАНЦИОННОЙ ТЕЛЕМЕТРИЧЕСКОЙ ПЕРЕДАЧЕЙ ИЗОБРАЖЕНИЯ ШКАЛЫ КУРСА | 2010 |
|
RU2441201C1 |
Изобретение относится к области навигационного приборостроения и может быть использовано в главных судовых магнитных компасах (МК). Заявленный способ заключается в следующем. Сигналы с датчика магнитного курса (ДМК) и микромеханического датчика угловой скорости (ММГ) поступают на усилители с коэффициентами  и
и  , и сумма этих сигналов далее пропускается через апериодическое звено
, и сумма этих сигналов далее пропускается через апериодическое звено  с постоянной времени
с постоянной времени  . Сигналы с ДМК и ММГ также поступают на усилители с коэффициентами
. Сигналы с ДМК и ММГ также поступают на усилители с коэффициентами  и
и  , и сумма этих сигналов пропускается через апериодическое звено
, и сумма этих сигналов пропускается через апериодическое звено  с постоянной времени
с постоянной времени  . Выбор текущего значения угла курса МК с выхода апериодического звена
. Выбор текущего значения угла курса МК с выхода апериодического звена  или производится на основе информации о периоде качки, получаемой судовым электронным кренометром. Затем производится передача полученного значения магнитного курса на выносной индикатор. Техническим результатом заявленного изобретения является повышение точности измерения МК во всем диапазоне качки судна. 1 ил.
или производится на основе информации о периоде качки, получаемой судовым электронным кренометром. Затем производится передача полученного значения магнитного курса на выносной индикатор. Техническим результатом заявленного изобретения является повышение точности измерения МК во всем диапазоне качки судна. 1 ил.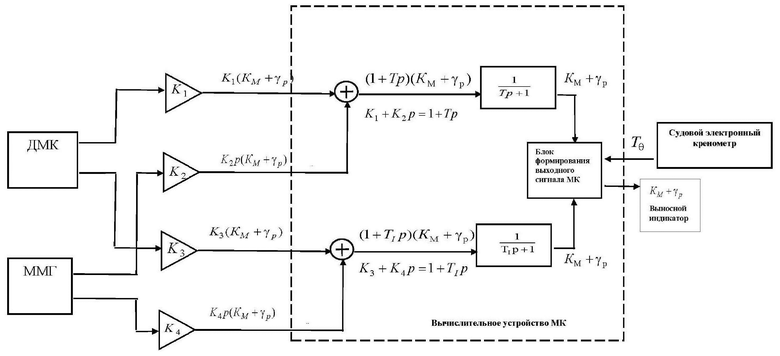
Способ измерения магнитного курса судна на качке при воздействии на магниточувствительный элемент картушки компаса вертикальной составляющей магнитного поля Земли, заключающийся в использовании в схеме измерения сигналов с датчика магнитного курса (ДМК) и микромеханического гироскопа (ММГ), установленного на котелке компаса, которые поступают на усилители с соответствующими коэффициентами усиления K1=1 и K2=T, и сумма этих сигналов далее пропускается через апериодическое звено  с постоянной времени T, отличающийся тем, что сигналы с ДМК и ММГ также поступают на дополнительные усилители с коэффициентами K3=1 и K4=TI, и сумма этих сигналов далее пропускается через апериодическое звено
с постоянной времени T, отличающийся тем, что сигналы с ДМК и ММГ также поступают на дополнительные усилители с коэффициентами K3=1 и K4=TI, и сумма этих сигналов далее пропускается через апериодическое звено  с постоянной времени TI, при этом выбор текущего значения угла курса магнитного компаса производится на основе получаемой от судового электронного кренометра информации о текущем значении периода качки T0: если текущее значение периода качки T0 находится в диапазоне 3с<T0<10c, то используется сигнал с выхода апериодического звена ; если текущее значение периода качки T0 находится в диапазоне 10с<T0<30c, то используется сигнал с выхода апериодического звена .
с постоянной времени TI, при этом выбор текущего значения угла курса магнитного компаса производится на основе получаемой от судового электронного кренометра информации о текущем значении периода качки T0: если текущее значение периода качки T0 находится в диапазоне 3с<T0<10c, то используется сигнал с выхода апериодического звена ; если текущее значение периода качки T0 находится в диапазоне 10с<T0<30c, то используется сигнал с выхода апериодического звена .
| Способ измерения магнитного курса судна с использованием системы коррекции | 2023 |
|
RU2804444C1 |
| СИСТЕМА КОРРЕКЦИИ ГИРОСТАБИЛИЗАТОРА МОРСКОГО ГРАВИМЕТРА | 2003 |
|
RU2244261C1 |
| DE 102014004060 B4, 22.10.2015 | |||
| US 7149627 B2, 12.12.2006. | |||

