Изобретение относится к контрольно измерительной технике и может найти применение при неразрушающем контроле дефектных зон элементов летательных аппаратов (ЭЛА), преимущественно при автоматизированном контроле дефектов поверхности при наземной отработке керамических и стеклопластиковых обтекателей.
Существует много способов и средств определения координат точек, качества поверхности тел вращения. Например, технические решения
по патентам на изобретение РФ: № 2536096 (МПК G03B 33/00, опубл. 20.12.2014); № 2147732 (МПК G01M 1/16, опубл. 20.04.2000); № 2589521(МПК G01N 29/26, опубл. 10.07.2016); № 2526518 (МПК G01N 29/22, опубл. 20.08.2014); № 2587201 (МПК B23B 25/06, B23Q 17/20, G01B 21/20, опубл. 20.06.2016); № 2575593 (МПК G01B 11/24, опубл. 20.02.2016); № 2359221 (МПК G01B 11/16, опубл. 20.06.2009); № 2642481(МПК G01B 11/08, опубл. 25.01.2018); № 2109250 (МПК G01B 11/24, опубл. 20.04.1998); по авторским свидетельствам на изобретения СССР: № 1158908 (МПК G01N 21/88, опубл. 30.05.1985); № 1718070 А1 (МПК G01N 23/20, опубл. 07.03.1992); по патентам на полезную модель РФ: № 143324 (МПК G01B 11/00, опубл. 20.07.2014); № 161400 (МПК G01B 5/20, опубл. 20.04.2016); № 165776 (МПК G01С 3/32, G01B 21/22 опубл. 10.11.2016).
У всех рассмотренных технических решений один общий недостаток – они созданы для решения конкретной задачи и исследования конкретных конструкций. Для того чтобы применить их для исследования других изделий, например для неразрушающего контроля обтекателей, требуется существенная доработка.
Кроме того, конструкция большинства из них обладает излишней сложностью, что ограничивает их применение.
Наиболее близким по технической сущности (прототипом) является решение по патенту на изобретение РФ № 2642481(МПК G01B 11/08, опубл. 25.01.2018).
Суть прототипа заключается в том, что известное устройство содержит приспособление для поворота контролируемого тела вокруг оси вращения, проходящей через центральную точку, находящуюся в пределах контролируемого поперечного сечения, перпендикулярно плоскости этого сечения, начиная от начального углового положения через каждые одинаковые угловые интервалы так, чтобы в пределах одного оборота их число было целым, преобразователь сигнала лазерного триангуляционного датчика расстояний в код, выход которого подключен к третьему входу микроконтроллера, вход запуска преобразования - к третьему выходу микроконтроллера, а измерительный вход – к выходу лазерного триангуляционного датчика расстояний, вход для внешнего запуска измерений которого соединен с четвертым выходом микроконтроллера, и персональный компьютер, вход которого подключен к выходу адаптера.
Из анализа структуры комплекса видно, что комплекс адаптирован только для применения лазерного триангуляционного датчика расстояний.
Комплекс применяется, в основном, в процессах промышленного возделывания садовых культур (саженцев и черенков).
Для неразрушающего контроля тел вращения типа обтекателей требуется, чтобы установка определения координат точек поверхности не была бы привязана жестко к определенному типу датчиков выявления дефектов.
Кроме того, в процессе неразрушающего контроля координаты должны быть зарегистрированы при обнаружении дефекта (дефект должен быть генератором своих координат).
Техническим результатом предлагаемого изобретения является устранение перечисленных недостатков прототипа и расширение функциональных возможностей устройств для определения координат дефектных зон обтекателей с применением широкого класса датчиков расстояния, перемещений, фотодатчиков и других, при использовании заявленного способа.
Указанный технический результат достигается тем, что предложен:
1. Способ регистрации координат дефектов элементов летательных аппаратов типа тел вращения, содержащий операцию вращения элементов летательных аппаратов (ЭЛА) и операцию регистрации угловой и линейных координат, отличающиеся тем, что координаты дефектов регистрируются и запоминаются при их обнаружении по сигналу первичных преобразователей, причем, координаты дефекта в пространстве могут быть определены по количеству оборотов ЭЛА вокруг своей оси относительно начальной точки отсчета при механической связи вращения ЭЛА с перемещением датчика высоты.
2. Способ регистрации координат дефектов элементов летательных аппаратов типа тел вращения по п.1, отличающиеся тем, что первичные преобразователи могут быть разной физической основы: ультразвуковые, тепловые, рентгеновские, оптические и другие.
3. Способ регистрации координат дефектов элементов летательных аппаратов типа тел вращения по п.1, отличающиеся тем, что связь между вращением ЭЛА и перемещением датчика высоты может быть механической, шестеренчатой.
4. Способ регистрации координат дефектов элементов летательных аппаратов типа тел вращения по п.1, отличающиеся тем, что связь между вращением ЭЛА и перемещением датчика высоты может быть механической, ременной.
5. Способ регистрации координат дефектов элементов летательных аппаратов типа тел вращения по п.1, отличающиеся тем, что связь между вращением ЭЛА и перемещением датчика высоты может быть бесконтактной.
Для достижения указанного технического результата в способе регистрации координат дефектов элементов летательных аппаратов типа тел вращения, который содержит операции вращения элемента летательного аппарата (ЭЛА), регистрацию угловой и линейных координат, координаты дефектов регистрируются и запоминаются
при их обнаружении по сигналу первичных преобразователей, причем, координаты дефекта в пространстве могут быть определены
по количеству оборотов ЭЛА вокруг своей оси относительно начальной точки отсчета при механической связи вращения ЭЛА с перемещением датчика высоты.
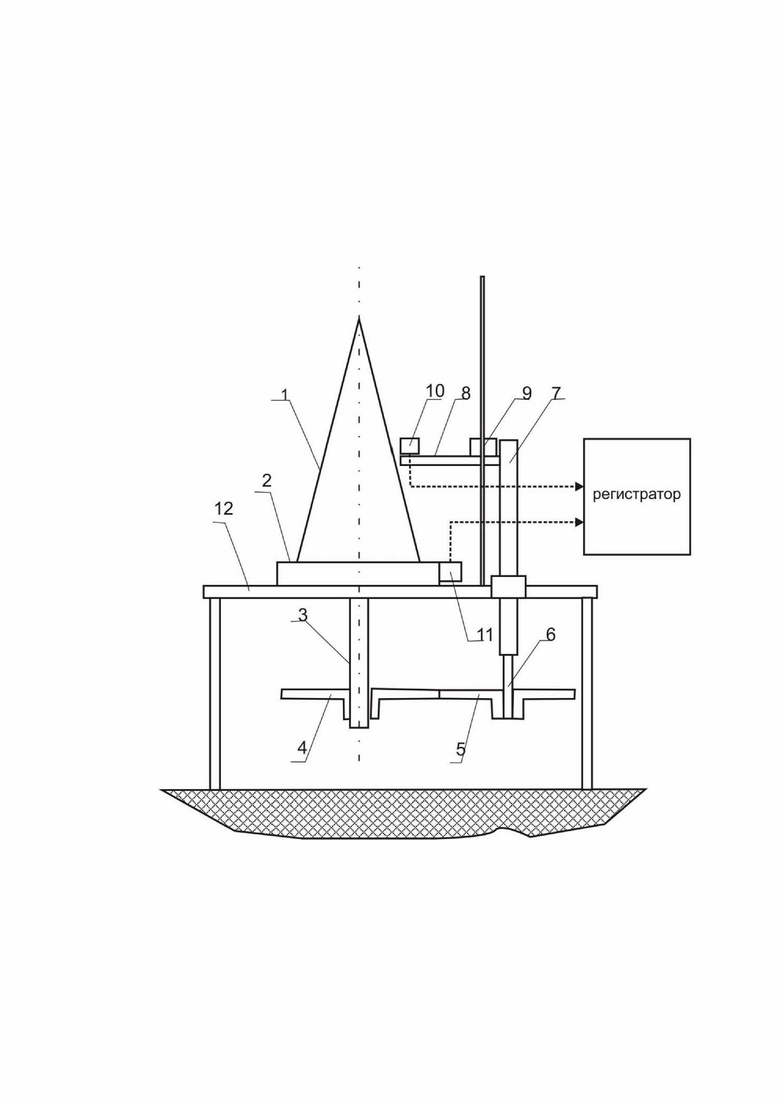
На фигуре приведена схема реализации предложенного способа при механической связи вращения ЭЛА с перемещением датчика высоты через шестерни.
На фигуре обтекатель 1 монтируется на вращающейся платформе 2, на валу 3 которой, установлена шестерня 4, которая взаимодействует с шестерней 5, установленной на валу 6 устройства перемещения 7 платформы датчиков 8, на которой смонтированы датчик высоты 9 и датчик дефектов 10. Датчик количества оборотов обозначен цифрой 11, а стол установки цифрой 12.
Суть предложенного способа заключатся в том, что при обнаружении дефекта, сигнал с датчика дефектов 10 поступает в регистратор и дает разрешение на регистрацию сигналов с датчика высоты 9 и с датчика количества оборотов 11. Очевидно, что при механической связи вращения ЭЛА с перемещением датчика высоты 9 координаты могут быть рассчитаны по количеству оборотов ЭЛА относительно начальной точки отсчета.
Одним из наиболее простых вариантов реализации предложенного способа возможен при визуально оптическом контроле керамических оболочек, где в качестве датчика 10 неоднородностей служит пар светодиод – фотодатчик. При обнаружении неоднородности изменение сигнала на выходе фотодатчика дает разрешение на регистрацию сигнала с датчика высоты 9 и датчика количества оборотов 11. Таким образом регистрируются координаты всех неоднородностей.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля качества производства обтекателей ракет | 2021 |
|
RU2759326C1 |
| Способ тепловых испытаний керамических оболочек | 2017 |
|
RU2649248C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КОМПЛЕКСА ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ПОПЕРЕЧНОГО СЕЧЕНИЯ ТЕЛ КВАЗИЦИЛИНДРИЧЕСКОЙ ФОРМЫ | 2016 |
|
RU2642481C1 |
| СПОСОБ КОНТРОЛЯ ВНЕШНЕГО ВИДА, ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ТВЭЛА И РАЗМЕРОВ ЕГО ДЕФЕКТОВ | 2023 |
|
RU2805139C1 |
| Способ испытания керамических оболочек | 2018 |
|
RU2697410C1 |
| Способ оптического контроля качества и определения размера плодоовощной продукции шарообразной формы при сортировке на конвейере | 2024 |
|
RU2837834C1 |
| Устройство для обнаружения дефектов на поверхности сортового проката и труб | 2021 |
|
RU2772555C1 |
| Способ обнаружения нефтезагрязнений в донных отложениях водоемов при помощи беспилотных летательных аппаратов | 2020 |
|
RU2748070C1 |
| Способ получения виртуальных моделей сложнопрофильных криволинейных поверхностей | 2023 |
|
RU2813465C1 |
| Способ определения дисперсного состава альфа-активных примесей при аварийном выбросе в атмосферу | 2021 |
|
RU2777752C1 |
Изобретение относится к контрольно-измерительной технике. Способ регистрации координат дефектов элементов летательных аппаратов типа тел вращения, содержащий операцию вращения элементов летательных аппаратов (ЭЛА) и операцию регистрации угловой и линейных координат, отличающийся тем, что координаты дефектов регистрируются и запоминаются при их обнаружении по сигналу первичных преобразователей, причем координаты дефекта в пространстве могут быть определены по количеству оборотов ЭЛА вокруг своей оси относительно начальной точки отсчета при механической связи вращения ЭЛА с перемещением датчика высоты. Технический результат - устранение недостатков прототипа и расширение арсенала технических средств. 4 з.п. ф-лы, 1 ил.
1. Способ регистрации координат дефектов элементов летательных аппаратов типа тел вращения, содержащий операцию вращения элементов летательных аппаратов (ЭЛА) и операцию регистрации угловой и линейных координат, отличающийся тем, что координаты дефектов регистрируются и запоминаются при их обнаружении по сигналу первичных преобразователей, причем координаты дефекта в пространстве могут быть определены по количеству оборотов ЭЛА вокруг своей оси относительно начальной точки отсчета при механической связи вращения ЭЛА с перемещением датчика высоты.
2. Способ регистрации координат дефектов элементов летательных аппаратов типа тел вращения по п.1, отличающийся тем, что первичные преобразователи могут быть разной физической основы: ультразвуковые, тепловые, рентгеновские, оптические и другие.
3. Способ регистрации координат дефектов элементов летательных аппаратов типа тел вращения по п.1, отличающийся тем, что связь между вращением ЭЛА и перемещением датчика высоты может быть механической, шестеренчатой.
4. Способ регистрации координат дефектов элементов летательных аппаратов типа тел вращения по п.1, отличающийся тем, что связь между вращением ЭЛА и перемещением датчика высоты может быть механической, ременной.
5. Способ регистрации координат дефектов элементов летательных аппаратов типа тел вращения по п.1, отличающийся тем, что связь между вращением ЭЛА и перемещением датчика высоты может быть бесконтактной.
| Способ контроля тонкостенных стеклопластиковых оболочек | 2016 |
|
RU2623662C1 |
| СПОСОБ СТАТИСТИЧЕСКОГО ПРИЕМОЧНОГО КОНТРОЛЯ КРУПНОГАБАРИТНЫХ ЦИЛИНДРИЧЕСКИХ ОБОЛОЧЕК ТОПЛИВНЫХ БАКОВ РАКЕТ | 2015 |
|
RU2583421C1 |
| ФОКИН В.И | |||
| "Совершенствование методов и средств наземных статических испытаний конструкций головных обтекателей летательных аппаратов" Автореферат диссертации на соискание ученой степени кандидата технических наук, Самара - 2009, стр | |||
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
| СПОСОБ НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ ПРОЧНОСТИ СТЕКЛОПЛАСТИКОВЫХ ТРУБ | 0 |
|
SU209828A1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ОСТАТОЧНОГО РЕСУРСА ТОНКОСТЕННЫХ ОБОЛОЧЕК ИЗ РЕЗЕРВУАРНЫХ И ТРУБНЫХ СТАЛЕЙ | 2002 |
|
RU2234079C2 |

