Изобретение относится к области построения самоходных (мобильных) принтеров, которые двигаются по плоскому листу «бумаги».
Известен способ работы и самоходный принтер от Zuta [1, 2], в котором предварительно по заданию на печать рассчитывается маршрут движения для печати изображения (или его части) и формируются управляющие сигналы для привода. Движение на двух ведущих колесах и двух ведомых колесах, которые поворачиваются [2]. Имеет ограничения по радиусу на поворотах. Принтер едет по оси X, потом по оси Y и печатает на остановках с помощью струйной монохромной головки, что замедляет его работу.
Для выполнения функций быстродействующего плоттера принтеру необходимо двигаться по произвольной траектории и одновременно печатать. Кроме того, при движении с нажатым рабочим (пишущим) стержнем устройство не должно разворачиваться.
Известны «всенаправленные» роликовые колеса без поворота обода Омни-колеса - колеса Илона от Mecanum АВ (Швеция) 1973 г. [3, 4], которые внедрены в погрузчике Sidewinder R Omni-Directional System Airtrax (США). Применение Омни-колес расширяет область возможных траекторий на повороте, снижает износ колес и повышает КПД, при этом требуются независимо управляемые и реверсивные двигатели по числу колес. При «точном» управлении двигателями, полностью произвольная траектория движения не достигается, т.к. при вращении колес контакт с поверхностью переходит между разными роликами. В мини роботах возможно движение с ошибкой ≤ ±5 мм, а для плоттера на формате А1 требуется ≤ ±0.2 мм.
Известен шаровой привод Калинкина на одно ведущее сферическое колесо с тремя электродвигателями [5]. Применение нескольких ведущих сферических колес потребует большего числа двигателей, их синхронизацию и выполнения жестких технологических требований ко всем деталям.
Известны варианты шарового электропривода [6, 7], в которых шаровое колесо поворачивается в трехмерном пространстве.
Известные способы и самоходные устройства не могут двигаться по произвольной траектории и печатать без остановки движения. Кроме того, они должны быть устойчивыми к технологическим разбросам и трению при движении с нажатым рабочим (пишущим) стержнем.
Технический результат - расширение функциональных возможностей (выполнение функций плоттера), повышение быстродействия (одновременное движение и печать) и упрощение (по конструкции колес, поворотного устройства и числу двигателей).
Наиболее близкими являются способ [1] и устройство [2] (прототипы).
Цель (технический результат) достигается тем, что:
• в способе, включающим загрузку данных, определение траектории движения, формирование управляющих сигналов, движение и печать, которые выполняют с помощью источника питания, процессора, модема, контроллера движения, контроллера печати, электропривода и узла печати, траекторию движения принтера для печати изображения определяют в виде последовательности невидимых и видимых отрезков линий, видимый отрезок линии изображения печатают при движении принтера по этому отрезку, во время движения синхронно вращают по меньшей мере три шара первого уровня и создают силы тяги, силы тяги прикладывают к принтеру симметрично, первоначально управляющие сигналы создают крутящий момент в электроприводе, крутящий момент передают от электропривода к шару второго уровня, от вращающегося шара второго уровня крутящий момент передают смежному шару первого уровня, а крутящий момент от вращающегося шара первого уровня передают смежному шару второго уровня, причем числа сил тяги, шаров первого и второго уровней равны;
• в принтере, содержащем источник питания, процессор, модем, контроллеры движения и контроллер печати, электропривод, узел печати, причем процессор через интерфейс соединен со всеми частями, привод принтера содержит по меньшей мере три шара первого уровня и равное ему число шаров второго уровня, на первом и втором уровнях шары установлены симметрично между наружной и внутренней втулками соответствующих уровней, причем шары второго уровня расположены выше и между шарами первого уровня, причем смежные шары двух уровней кинематически связаны, а центры всех втулок соосны оси рабочего стержня, наружная втулка первого уровня закреплена в основании корпуса принтера, наружная втулка второго уровня зафиксирована в корпусе принтера, а электропривод кинематически соединен по меньшей мере с одним шаром второго уровня;
• электропривод содержит два электродвигателя, причем их валы ориентированы ортогонально в плоскости параллельной листу и кинематически соединены попарно соответственно с двумя шарами второго уровня;
• электропривод содержит шаровый электродвигатель, который кинематически соединен с одним шаром второго уровня;
• в узле печати установлен сменный рабочий стержень (стержень шариковый или гелевый, фломастер, маркер, карандаш);
• в наружной втулке второго уровня установлен ограничитель углового смещения шара.
Группа изобретений связана общим замыслом и удовлетворяет требованию единства изобретения, т.к. принтер является устройством для осуществления способа. При анализе уровня техники и новизны заявляемых объектов не обнаружены аналоги с совокупностью существенных признаков, поэтому технические решения соответствует критерию "новизна".
На фиг. 1-4 представлен способ, а фиг. 5-8 относятся к устройству. Рисунки для расчета размеров приведены на фиг. 6 и 7. Траектория движения принтера (фиг. 1) по листу 10 представлена как последовательность невидимых отрезков линий 11→12, 13→14, 15→16 и видимых отрезков линий изображения 12→13, а также 14→15, …, 16→17 (буквы С, …, Z).
Печать видимого отрезка линии изображения выполняется во время движения принтера по видимому отрезку линии изображения.
В граф схеме алгоритма (фиг. 2) используются следующие обозначения:
21 - «Ввод данных»;
22 - «Определение траекторий движения и сигналов»;
23 - «Движение по невидимому отрезку линии изображения»;
24 - «Движение по видимому отрезку линии изображения и печать»;
25 - «Остались ли видимые отрезки линий изображения?»;
26 - «Страница напечатана?».
Переходы А (24→22) и В (26→21) описывают конвейерную работу и если обрабатывается только часть введенного изображения.
Функциональная схема принтера 300 (фиг. 3) содержит: источник питания 301, процессор (CPU) 302, модем 303, контроллеры печати 304 и движения 305. Поясняющая создание крутящих моментов и сил тяги кинематическая схема принтера 400 (фиг. 3) содержит электропривод 401, шары первого уровня 402 и шары второго уровня 403, узел печати 404 с рабочим стержнем. Возможность увеличения числа шаров и сил тяги (N = 3, 4, 5, …) отображена точками. Стрелками отображены проекции крутящих моментов шаров на плоскости параллельные вертикальному разрезу А-А. В горизонтальной плоскости используются обозначения «+» и «⋅» для исходящих и входящих направлений соответственно, причем в левой и правой частях они разнонаправлены. Ротор электропривода 401 и шары 402 вращаются по часовой стрелке, а шары 403 вращаются против часовой стрелки.
Передача крутящего момента между шарами двух уровней выравнивает силы тяги и повышает технологическую устойчивость, при симметрии точек приложения сил обеспечивает движение устойчивое к трению рабочего стержня.
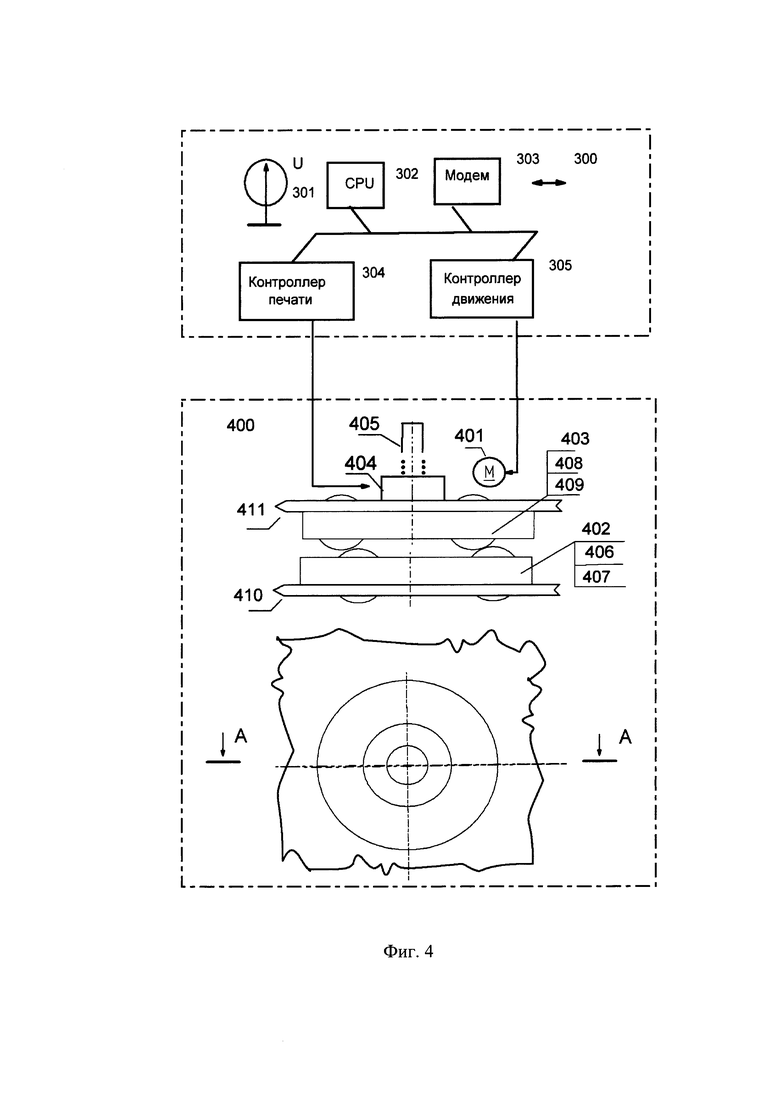
На фиг. 4 приведена функциональная схема 300 и привод 400 принтера. Функциональная схема содержит источник питания 301, процессор (CPU) 302, модем 303, контроллеры печати 304 и движения 305. Привод содержит электропривод 401, шары первого уровня 402, шары второго уровня 403, узел печати 404, рабочий стержень 405, который входит в 404, наружная и внутренняя втулки первого уровня 406, 407 и второго уровня 408, 409, а также основание корпуса 410 и упор корпуса 411. Для нечетного числа шаров на первом 402 и на втором 403 уровнях N = 3, 5, … на фиг. 5 представлено вертикальное сечение, проходящее через центры смежных шаров. На фиг. 5 также видна дополнительная упругая шайба 412, которая предназначена для поддержания кинематических связей при износе деталей. Конструкция втулок и расположение шаров двух уровней 402 и 403 выравнивает крутящие моменты и силы тяги при технологических разбросах. Достаточно равенства диаметров шаров в одном уровне.
В случае использования шаров одного диаметра на двух уровнях для расчетов размеров приведены рисунки плоскостей горизонтального (фиг. 6) и вертикального (фиг. 7) сечений, проходящих через точки контактов смежных шаров 402 и 403. На фиг. 6 и 7 используются следующие обозначения:
а - угол дуги от центра принтера (оси центров втулок) между проекцией центра шара к точке контакта шаров двух уровней;
R1 - проекция радиуса шара относительно его центра;
R0 - радиус от центра принтера до центров проекций шаров, который равен расстоянию от оси втулок до центров шаров двух уровней;
h - высота сечения;
H - максимальный выступ;
r - радиус шара;
b - угол между осью шара и лучом из его центра в точку контакта.
Одному шару соответствует угол 2а. Угол а определяется по формуле:

где N - число сил тяги и число шаров в каждом ярусе.
Радиусы шара r и R1 связаны соотношением:

Высота сечения h и максимальный выступ вычисляются по формулам:


На фиг. 7 не отображены:
G - максимальная глубина дорожки качения;
Δ - минимальная стенка втулок Δ≥0,5-1,5 мм (зависит от материала).
Радиус окружности R0, проходящей через центры шаров:

G - максимальный диаметр рабочего стержня, D0 - диаметр отверстия внутренних втулках 407 и 409 и D - диаметр внешних втулок 405 и 407 определяются по формулам:



Без учета Δ, принимая, что Δ=0, получим:


Высота сборки двух ярусах шаров Нс:

С помощью таблицы 1 по углам а°, b° и r можно определить размеры для выбора подходящего варианта.
На фиг. 8 представлен ограничитель поворота шара. При простой геометрии (симметричной) канавок наружных втулках установки одной втулки 413 (фиг. 8) в наружную втулку второго уровня 408 достаточно для исключения углового смещения всех шаров в наружных втулках, что повышает устойчивость кинематических связей в устройстве.
Длина сменного рабочего (пишущего) стержня 405 может быть больше высоты принтера, например, при использовании стандартных пишущих стержней (стержней ручек, фломастеров, или маркеров). Это расширяет функциональные возможности и позволяет экономить на расходных материалах по сравнению с заправкой чернилами или заменой кадриджа.

Функционирование принтера осуществляется в соответствии с описанным способом. Для повышения точности на сложных листах можно использовать навигацию по [8, 9]. Скорость печати текста зависит от выбора шрифта, причем «рукописные» и по ЕСКД имеют преимущества.
Таким образом, предложение выполняет функцию плоттера, отличается высоким быстродействием и имеет меньшие аппаратные затраты.
Источники информации
1. US 2016/03111239 A1, МПК B41J 29/38 27.10.2016
2. US D736312 S D18/50, 16.08.2015
3. US 3867225 МПК В60В 19/00 13.11.1972
4. US 7980335 В2 МПК В60В 19/12 19.07.2011
5. RU 2581806 С1 МПК B62D 57/03 Бюл. №11 20.04.2016
6. RU 2020107199 А МПК H03K 21/12, Бюл. №11 17.04.2020
7. RU 2728275 С2 МПК H03K 21/14, Бюл. №22 29.07.2020
8. RU 2020132352 А МПК G01S 5/00, Бюл. №34 03.12.2020
9. RU 2758714 С МПК G01S 5/00 на 30.11.2021.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВИГАЦИИ ДЛЯ ПРИНТЕРА, ПРИНТЕР И МАЯК | 2020 |
|
RU2758714C2 |
| Строительный 3D принтер | 2020 |
|
RU2753324C1 |
| 3D-ПРИНТЕР ДЛЯ ПАРАЛЛЕЛЬНОЙ ПЕЧАТИ | 2019 |
|
RU2719528C1 |
| ПРИНТЕР | 1992 |
|
RU2088969C1 |
| УСТРОЙСТВО ПЕРЕМЕЩЕНИЯ ПЕЧАТАЮЩЕЙ ГОЛОВКИ ДЛЯ 3D-ПРИНТЕРА | 2014 |
|
RU2552235C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРИНТЕРОМ С ФУНКЦИЕЙ ТЕКУЩЕГО КОНТРОЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1996 |
|
RU2187146C2 |
| Промышленный 3D-принтер для высокотемпературной печати | 2021 |
|
RU2770997C1 |
| УСТРОЙСТВО ПЕРЕМЕЩЕНИЯ РАБОЧЕГО СТОЛА ЗD-ПРИНТЕРА | 2014 |
|
RU2567318C1 |
| 3D-ПРИНТЕР | 2019 |
|
RU2698353C1 |
| ПЕЧАТАЮЩАЯ ГОЛОВКА СТРУЙНОГО ПРИНТЕРА, ИМЕЮЩАЯ ЧЕТЫРЕ РАСПОЛОЖЕННЫХ В ШАХМАТНОМ ПОРЯДКЕ РЯДА СОПЕЛ | 2001 |
|
RU2269424C2 |





Настоящее изобретение относится к области принтеров. Определяют видимые и невидимые отрезки линий. При движении принтера по отрезкам линий печатают видимый отрезок линий, синхронно вращают шары на первом и на втором уровнях. Крутящий момент передают от электропривода к шарам на втором уровне, от шаров второго уровня крутящий момент передают к шарам первого уровня, а от них - к смежному шару второго уровня. Заявленное изобретение направлено на обеспечение функции самоходного плоттера, быстродействие и упрощение конструкции. 2 н. и 4 з.п. ф-лы, 8 ил., 1 табл.
1. Способ работы самоходного принтера, включающий загрузку данных, определение траектории движения, формирование управляющих сигналов, движение и печать, которые выполняют с помощью источника питания, процессора, модема, контроллера движения, контроллера печати, электропривода и узла печати, отличающийся тем, что траекторию движения принтера для печати изображения определяют в виде последовательности невидимых и видимых отрезков линий, видимый отрезок линии изображения печатают при движении принтера по этому отрезку, во время движения синхронно вращают по меньшей мере три шара первого уровня и создают силы тяги, силы тяги прикладывают к принтеру симметрично, первоначально управляющие сигналы создают крутящий момент в электроприводе, крутящий момент передают от электропривода к шару второго уровня, от вращающегося шара второго уровня крутящий момент передают смежному шару первого уровня, а крутящий момент от вращающегося шара первого уровня передают смежному шару второго уровня, причем числа сил тяги шаров первого и второго уровней равны.
2. Принтер, содержащий источник питания, процессор, модем, контроллеры движения и контроллер печати, электропривод, узел печати, причем процессор через интерфейс соединен со всеми частями, отличающийся тем, что привод принтера содержит по меньшей мере три шара первого уровня и равное ему число шаров второго уровня, на первом и втором уровнях шары установлены симметрично между наружной и внутренней втулками соответствующих уровней, причем шары второго уровня расположены выше и между шарами первого уровня, причем смежные шары двух уровней кинематически связаны, а центры всех втулок соосны оси рабочего стержня, наружная втулка первого уровня закреплена в основании корпуса принтера, наружная втулка второго уровня зафиксирована в корпусе принтера, а электропривод кинематически соединен по меньшей мере с одним шаром второго уровня.
3. Принтер по п. 2, отличающийся тем, что электропривод содержит два электродвигателя, причем их валы ориентированы ортогонально в плоскости, параллельной листу, и кинематически соединены попарно соответственно с двумя шарами второго уровня.
4. Принтер по п. 2, отличающийся тем, что электропривод содержит шаровый электродвигатель, который кинематически соединен с одним шаром второго уровня.
5. Принтер по п. 2, отличающийся тем, что в узле печати установлен сменный рабочий стержень (стержень шариковый или гелевый, фломастер, маркер, карандаш).
6. Принтер по п. 2, отличающийся тем, что в наружной втулке второго уровня установлен ограничитель углового смещения шара.
| Устройство для доворота и фиксации шпинделя | 1980 |
|
SU931364A1 |
| Способ получения 5-(замещенный фенил)-оксазолидинонов или их серусодержащих аналогов | 1977 |
|
SU888821A3 |
| Способ соединения прокладок с металлической полосой полыми заклепками | 1973 |
|
SU532448A1 |
| Устройство к канатовьющей машине для деформирования прядей | 1980 |
|
SU859517A2 |

