Настоящее изобретение относится к области гидроакустики и может быть использовано при батиметрической съемке рельефа дна акватории многолучевым эхолотом (МЛЭ).
При батиметрической съемке рельефа дна акватории с помощью МЛЭ важным фактором является производительность съемки, повышение которой позволяет снизить себестоимость работ и является актуальной задачей.
Производительность съемки МЛЭ определяется угловым размером сектора обзора, а также полосой обзора. Под термином «сектор обзора» для МЛЭ понимается область пространства в траверзной плоскости судна, измеряемая в углах, в пределах которой производится излучение, прием и обработка эхосигналов. Полоса обзора представляет собой участок поверхности дна, вытянутый в траверзной плоскости судна, в пределах которого производится оценка отстояния от дна - расстояния между приемной гидроакустической антенной и поверхностью дна для каждой приемной характеристики направленности МЛЭ.
Ширина полосы обзора МЛЭ в траверзной плоскости судна Ly рассчитывается но формуле

где h - расстояние между приемной гидроакустической антенной и поверхностью дна по нормали к дну; θ - угол, составляющий половину сектора обзора.
За один цикл зондирования МЛЭ получает данные об отстоянии от дна в пределах полосы обзора, и чем больше ее ширина, тем больше участок поверхности дна будет охвачен при выполнении батиметрической съемки.
Таким образом, при увеличении ширины полосы обзора производительность съемки рельефа дна увеличивается.
Известен МЛЭ (Фирсов Ю.Г. Основы гидроакустики и использования гидрографических сонаров. СПб.: Нестор-История, 2010. С. 79-85, 88-91, 115-121) из описания которого следует, что он реализует следующий способ съемки рельефа дна: съемку рельефа дна акватории выполняют при движении судна заданными галсами с помощью гидроакустической излучающей и гидроакустической приемной антенн, соединенных Т-образно и размещенных в днище судна в диаметральной и траверзной плоскостях судна, соответственно, так, что активные поверхности антенн направлены в сторону дна, устанавливают период зондирования сигналов, излучение сигналов производят гидроакустической излучающей антенной с характеристикой направленности (ХН), широкой - в траверзной плоскости судна, и узкой - в диаметральной плоскости судна, прием эхосигналов от поверхности дна производят гидроакустической приемной антенной, формирующей статический веер приемных ХН электронным способом, оценивают время запаздывания между моментом излучения и моментом приема эхосигнала, рассчитывают оценку отстояния от дна для каждой из приемных характеристик направленности в пределах сектора обзора, определяют координаты, курс, скорость движения, углы бортовой и килевой качки судна по внешним источникам информации, оценивают профиль скорости звука в воде, выполняют расчет поправок к полученным отстояниям от дна, определяют истинные глубины путем суммирования полученных отстояний от дна и поправок, регистрируют полученные истинные глубины и их геодезические координаты.
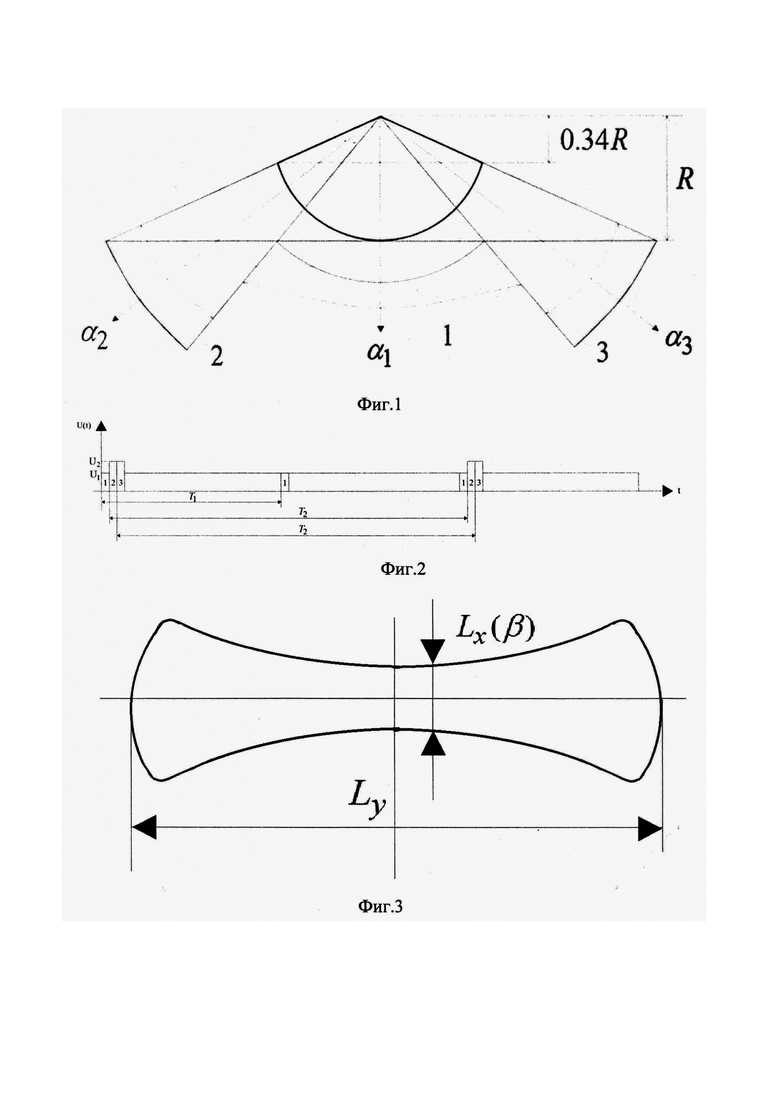
Существенным недостатком данного способа-аналога является уменьшение ширины полосы обзора в траверзной плоскости судна, обусловленное тем, что излучение сигнала в сторону дна производится одновременно в пределах всего сектора обзора. При этом форма сектора обзора в пространстве представляет собой сектор круга, следовательно, ширину полосы обзора в траверзной плоскости судна можно рассчитывать по формуле (1) только для отстояний от дна h≤R cos θ, где R - максимальное отстояние от дна по выбранной шкале дальности, θ - угол, составляющий половину сектора обзора.
При типовом значении сектора обзора для МЛЭ равного 140°, значение θ=70°, значит величина Rcosθ=0.347R, и для значений отстояний от дна h больших, чем 0.34R будет происходить уменьшение ширины полоса обзора по краям сектора обзора, обусловленное его формой.
Выбор шкалы дальности с большим значением максимального отстояния от дна R для устранения указанного недостатка приведет к увеличению периода зондирования T=2R/cZ, где cZ - значение скорости звука в воде, при этом необходимо пропорционально уменьшить скорость судна при выполнении съемки для обеспечения перекрытия между соседними полосами обзора, и, как результат, производительность съемки уменьшится.
По количеству общих признаков наиболее близким аналогом предлагаемого способа является способ съемки рельефа дна акватории с помощью МЛЭ (www.kongsberg.com/maritime/products/mapping-systems/mapping-system/multibeam-echo-sounders/em-712-multibeam-echo-sounder.-3600-m, ЕМ 712 Multibeam echosounder), в котором съемку рельефа дна акватории выполняют при движении судна заданными галсами с помощью гидроакустической излучающей и гидроакустической приемной антенн, соединенных Т-образно и размещенных в днище судна в диаметральной и траверзной плоскостях судна, соответственно, так, что активные поверхности антенн направлены в сторону дна, излучение сигналов производят гидроакустической излучающей антенной с характеристикой направленности (ХН), широкой - в траверзной плоскости судна, и узкой - в диаметральной плоскости судна, при излучении разделяют сектор обзора на три перекрывающих сектор обзора подсектора: первый подсектор центральный, второй и третий подсекторы по краям сектора обзора, рассчитывают временные задержки для формирования ХН излучающей антенны в сторону дна в каждый из подсекторов, устанавливают период зондирования сигналов T1 для первого подсектора, генерируют первый сигнал с амплитудой U1 для излучения в первый подсектор, последовательно излучают в сторону дна первый сигнал в первый подсектор, второй сигнал во второй подсектор, третий сигнал в третий подсектор, прием эхосигналов от поверхности дна производят гидроакустической приемной антенной, формирующей статический веер приемных ХН электронным способом, выполняют определение времени запаздывания между моментом излучения и моментом приема эхосигнала для каждой из приемных ХН в каждом цикле зондирования, рассчитывают оценку отстояния от дна для каждой из приемных характеристик направленности в пределах сектора обзора, определяют координаты, курс, скорость движения, углы бортовой и килевой качки судна по внешним источникам информации, оценивают профиль скорости звука в воде, выполняют расчет поправок к полученным отстояниям от дна, определяют истинные глубины путем суммирования полученных отстояний от дна и поправок, регистрируют полученные истинные глубины и их геодезические координаты.
Существенным недостатком данного способа также является уменьшение ширины полосы обзора в траверзной плоскости судна, обусловленное тем, что излучение сигнала в сторону дна производится с заданным периодом зондирования в пределах всего сектора обзора, одинаковым для каждого из подсекторов, а рабочая полоса частот МЛЭ разделяется на три части в этом способе для обеспечения гидроакустической совместимости при излучении и приеме сигналов. Разделение сектора обзора МЛЭ при излучении используется для компенсации качки судна при оценке отстояния от дна, а также для подавления отраженных сигналов, приходящих по боковым лепесткам приемных ХН.
Задачей изобретения является повышение производительность съемки рельефа дна акватории с помощью многолучевого эхолота.
Технический результат заключается в повышении скорости съемки рельефа дна акватории при обеспечении заданной ширины полосы обзора в траверзной плоскости судна.
Для обеспечения указанного технического результата в известный способ съемки рельефа дна акватории, в котором: съемку рельефа дна акватории выполняют при движении судна заданными галсами с помощью гидроакустической излучающей и гидроакустической приемной антенн, соединенных Т-образно и размещенных в днище судна в диаметральной и траверзной плоскостях судна, соответственно, так, что активные поверхности антенн направлены в сторону дна, при излучении разделяют сектор обзора на три перекрывающих сектор обзора подсектора: первый подсектор центральный, второй и третий подсекторы по краям сектора обзора, рассчитывают временные задержки для формирования ХН излучающей антенны в сторону дна в каждый из подсекторов, устанавливают период зондирования сигналов T1 для первого подсектора, генерируют первый сигнал с амплитудой U1 для излучения в первый подсектор, последовательно излучают в сторону дна первый сигнал в первый подсектор, второй сигнал во второй подсектор, третий сигнал в третий подсектор, излучение сигналов производят гидроакустической излучающей антенной с характеристикой направленности (ХН), широкой - в траверзной плоскости судна, и узкой - в диаметральной плоскости судна, прием эхосигналов от поверхности дна производят гидроакустической приемной антенной, формирующей статический веер приемных ХН электронным способом, выполняют определение времени запаздывания между моментом излучения и моментом приема эхосигнала для каждой из приемных ХН в каждом цикле зондирования, определяют оценку отстояния от дна для каждой из приемных характеристик направленности в пределах сектора обзора, определяют координаты, курс, скорость движения, углы бортовой и килевой качки судна но внешним источникам информации, оценивают профиль скорости звука в воде, выполняют расчет поправок к полученным отстояниям от дна, определяют истинные глубины путем суммирования полученных отстояний от дна и поправок, регистрируют полученные истинные глубины и их геодезические координаты, введены новые признаки: устанавливают период зондирования Т2=2Т1 для второго подсектора и третьего подсектора, генерируют второй и третий сигналы с амплитудой U2≥6U1 для излучения во второй и третий подсектора, соответственно, а для определения отстояния от дна производят усреднение отстояний от дна, полученных в первом подсекторе для двух соседних циклов зондирования, формируют значения отстояний от дна в полосе обзора в соответствии с периодом зондирования, установленного для второго подсектора и третьего подсектора.
Разделение сектора обзора на три подсектора в сочетании с обеспечением излучения сигналов в сторону дна в каждый из подсекторов с заданным периодом зондирования позволяет преобразовать форму сектора обзора, обеспечивающую заданную ширину полосы обзора в траверзной плоскости судна в пределах сектора обзора, а также обеспечить перекрытие между полосами обзора в соседних циклах зондирования с учетом ширины в диаметральной плоскости судна для повышения скорости съемки рельефа дна акватории.
Реализация данного способа поясняется фиг. 1, 2.
На фиг. 1 показана геометрия задачи формирования полосы обзора МЛЭ при разделении сектора обзора на три перекрывающиеся подсектора, на которой представлены - первый подсектор 1, второй подсектор 2, третий подсектор 3. На фиг. 2 показана временная диаграмма работы МЛЭ при последовательном излучении сигналов в каждый из трех подсекторов. На фиг. 3 показана полоса обзора МЛЭ.
Предложенный способ реализуется следующим образом:
Съемку рельефа дна акватории выполняют при движении судна заданными галсами с помощью гидроакустической излучающей и гидроакустической приемной антенн, соединенных Т-образно и размещенных в днище судна в диаметральной и траверзной плоскостях судна, соответственно, так, что активные поверхности антенн направлены в сторону дна.
При излучении разделяют сектор обзора на три подсектора (см. фиг. 1). Данное число подсекторов является оптимальным для увеличения скорости съемки рельефа дна акватории в силу симметрии формы сектора обзора. В пределах сектора обзора первый подсектор располагается в диапазоне углов от -48.2° до +48.2° в траверзной плоскости судна относительно нормали гидроакустической излучающей антенне, второй подсектор - в диапазоне углов от -θ до -48.2°, третий подсектор - в диапазоне углов от +48.2° до +θ.
Угол наклона ХН в излучении для формирования первого подсектора составляет α1=0°, для формирования второго и третьего подсекторов - α2=0.5(-θ+48.2°) и α3=0.5(θ-48.2°), соответственно.
С помощью излучающей гидроакустической антенны формируют ХН для заданных угловых направлений αi, широкую - в траверзной плоскости судна, и узкую - в диаметральной плоскости судна, для излучения сигналов в сторону дна в каждый из подсекторов.
Устанавливают период зондирования для первого подсектора равный T1=3R/cZ, где R - ожидаемое максимальное значение отстояния от дна в обследуемой акватории, cZ - скорость звука в воде в месте установки гидроакустической излучающей антенны.
Для второго подсектора и третьего подсектора устанавливают период зондирования равный T2=2T1.
Генерируют первый сигнал с амплитудой U1 для излучения в первый подсектор, генерируют второй и третий сигналы с амплитудами U2 для излучения во второй и третий подсектора, соответственно. Значение амплитуды U2 должно превышать значение амплитуды U1 более чем в 6 раз для обеспечения заданного отношения «сигнал/шум» при приеме эхосигналов, пришедших во втором и третьем подсекторах.
Три сигнала, генерируемые для излучения в сторону дна, имеют заданные несущие частоты и длительность.
Последовательно излучают первый сигнал в первый подсектор, второй сигнал во второй подсектор, третий сигнал в третий подсектор (см. фиг. 2).
Прием эхосигналов от поверхности дна производят гидроакустической приемной антенной, формирующей статический веер приемных ХН электронным способом в пределах известного сектора обзора.
Выполняют определение времени запаздывания между моментом излучения и моментом приема эхосигнала для каждой из приемных ХН в каждом цикле зондирования (Фирсов Ю.Г. Основы гидроакустики и использования гидрографических сонаров. СПб.: Нестор-История, 2010. С. 116-120).
Рассчитывают оценку отстояния r2m (k) от дна для каждой k-ой приемной характеристик направленности в пределах сектора обзора по полученным значениям времени запаздывания:
- в первом подсекторе: 
- во втором подсекторе 
- в третьем подсекторе 
где
m - текущий номер цикла зондирования для первого подсектора;
cZ - скорость звука в воде;
tk - время запаздывания эхосигнала между моментом излучения и моментом приема для k-ой приемной ХН;
τ - длительность импульса в излучении;
K1 - номер приемной XH, угол наклона которой приходится на левый край первого подсектора;
K2 - номер приемной ХН, угол наклона которой приходится на правый край первого подсектора;
K - общее число приемных ХН, формируемых в пределах сектора обзора.
Для современного МЛЭ число K≥100, при типовом значении K=128 и секторе обзора МЛЭ, равного 140°, тогда номера приемных ХН, составляющих первый подсектор, K1=17 и K2=112.
Период зондирования для второго и третьего подсекторов в два раза больше, чем для первого подсектора, т.е. T2=2T1. Следовательно, оценки отстояния от дна в полосе обзора для первого подсектора формируются в два раза чаще, чем для второго и третьего подсекторов, поэтому в формулах (3) и (4) индекс m в два раза больше, чем в (2).
Далее производят усреднение отстояний от дна, полученных в первом подсекторе для двух соседних циклов зондирования по формуле

где m - текущий номер цикла зондирования для первого подсектора.
В результате в массиве r2m получают значения отстояния от дна для всех K приемных ХН, т.е. для всех подсекторов. Таким образом, формируют значения отстояний от дна в полосе обзора в соответствии с периодом зондирования, установленного для второго подсектора и третьего подсектора.
Далее определяют координаты, курс, скорость движения, углы бортовой и килевой качки судна по внешним источникам информации, оценивают профиль скорости звука в воде.
Выполняют расчет поправок к полученным отстояниям от дна. Данная процедура является известной (например, Фирсов Ю.Г. Основы гидроакустики и использования гидрографических сонаров. СПб.: Нестор-История, 2010. С. 129-148).
Определяют истинные глубины путем суммирования полученных отстояний от дна и поправок. Регистрируют полученные истинные глубины и их геодезические координаты.
Поясним достижение технического результата.
Для МЛЭ из способа-прототипа форма сектора обзора в пространстве представляет собой сектор круга, и для значений расстояния между приемной гидроакустической антенной и поверхностью дна по нормали к дну h>Rcosθ будет происходить уменьшение ширины полоса обзора по краям сектора обзора, обусловленное его формой.
В идеальном случае форма сектора обзора МЛЭ должна быть треугольной, тогда в пределах заданного значения R при выполнении съемки, ширина полосы обзора траверзной плоскости судна будет определяться по формуле (1).
Для обеспечения ширины полосы обзора в траверзной плоскости судна, соответствующей известному сектору обзора МЛЭ, в способе-прототипе при заданном R, необходимо установить период зондирования, равный T3=2R1/cZ, где R1=3R.
Тогда, при значениях h≤0.34⋅R1=0.34⋅3⋅R≈R, ширина полосы обзора в траверзной плоскости судна будет соответствовать сектору обзора МЛЭ равному 140° согласно (1), а при больших отстояниях от дна будет уменьшаться.
Ширина полосы обзора Lx в диаметральной плоскости судна определяется по формуле (см. фиг. 3)

где
h - расстояние между приемной гидроакустической антенной и поверхностью дна по нормали к дну;
β - угол наклона оси приемной ХН в траверзной плоскости судна;
Δα - ширина ХН в излучении в диаметральной плоскости судна.
В соответствии с (6) ширина полосы обзора в диаметральной плоскости увеличивается от центра к краям.
Максимальную скорость съемки рельефа дна акватории в способе-прототипе можно определить по формуле

При расчете по формуле (7) берется минимальное значение ширины полосы обзора в диаметральной плоскости судна, соответствующее значению угла наклона приемной XH равное β=0°, для обеспечения перекрытия между полосами обзора в соседних циклах зондирования.
Б предлагаемом способе съемки рельефа дна максимальная скорость съемки составляет:
- для первого подсектора 
- для второго и третьего подсекторов, учитывая (6)
Lx(β=48.2°)=Lx(β=0°)/cos(48.2°)=1.5⋅Lx(β=0°), получаем

Для обеспечения перекрытия между полосами обзора в соседних циклах зондирования выбирается скорость съемки рельефа дна акватории наименьшая из двух значений V1 и V2, т.е. V2.
Таким образом, скорость съемки рельефа дна акватории увеличивается в  раза, следовательно, производительность предложенного способа больше по сравнению с известным способом-прототипом при обеспечении заданной ширины полосы обзора в траверзной плоскости судна в пределах сектора обзора.
раза, следовательно, производительность предложенного способа больше по сравнению с известным способом-прототипом при обеспечении заданной ширины полосы обзора в траверзной плоскости судна в пределах сектора обзора.
В результате технический результат изобретения достигнут.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для съемки рельефа дна акватории | 2018 |
|
RU2703786C1 |
| Многолучевой эхолот автономного необитаемого подводного аппарата | 2021 |
|
RU2759497C1 |
| Способ съемки рельефа поверхности | 2020 |
|
RU2757065C1 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2439614C2 |
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ, ОСНАЩЕННЫЙ ГИДРОАКУСТИЧЕСКОЙ АППАРАТУРОЙ ДЛЯ ОБНАРУЖЕНИЯ ЗАИЛЕННЫХ ОБЪЕКТОВ И ТРУБОПРОВОДОВ | 2010 |
|
RU2463203C2 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2434246C1 |
| Устройство для съемки подводной поверхности айсберга | 2021 |
|
RU2771434C1 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ ДНА МНОГОЛУЧЕВЫМ ЭХОЛОТОМ | 2014 |
|
RU2555204C1 |
| СПОСОБ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ РЕЛЬЕФА И ОСАДКИ ПОДВОДНОЙ ЧАСТИ АЙСБЕРГА | 2016 |
|
RU2623830C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОПРАВОК К ГЛУБИНАМ, ИЗМЕРЕННЫМ ЭХОЛОТОМ ПРИ СЪЕМКЕ РЕЛЬЕФА ДНА АКВАТОРИИ | 2009 |
|
RU2461021C2 |
Использование: изобретение относится к области гидроакустики и может быть использовано при батиметрической съемке рельефа дна акватории многолучевым эхолотом. Сущность: в способе съемки рельефа дна акватории съемку рельефа дна акватории выполняют при движении судна галсами с помощью гидроакустических излучающей и приемной антенн, соединенных Т-образно, при излучении разделяют сектор обзора на три перекрывающих его обзора подсектора: первый подсектор центральный, второй и третий подсекторы по краям сектора обзора, устанавливают период зондирования T1 для первого подсектора, устанавливают период зондирования T2=2T1 для остальных подсекторов, генерируют первый сигнал с амплитудой U1 для излучения в первый подсектор, генерируют второй и третий сигналы с амплитудой U2≥6U1 для излучения остальные подсектора, последовательно излучают сигналы в сторону дна в каждый из подсекторов, выполняют определение времени запаздывания между моментами излучения и приема эхосигнала, а также рассчитывают оценку отстояния от дна для каждой из приемных характеристик направленности, производят усреднение отстояний от дна, полученных в первом подсекторе для двух соседних циклов зондирования, формируют значения отстояний от дна в полосе обзора в соответствии с периодом зондирования, установленного для второго подсектора и третьего подсектора, определяют параметры движения судна и профиль скорости звука в воде для расчета поправок, определяют истинные глубины путем суммирования полученных отстояний от дна и поправок, регистрируют истинные глубины и их геодезические координаты. Технический результат: повышение скорости съемки рельефа дна акватории при обеспечении заданной ширины полосы обзора в траверзной плоскости судна. 3 ил.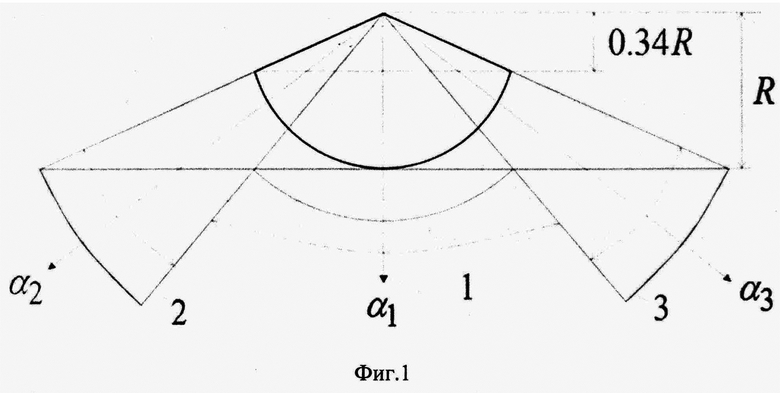
Способ съемки рельефа дна акватории, в котором: съемку рельефа дна акватории выполняют при движении судна заданными галсами с помощью гидроакустической излучающей и гидроакустической приемной антенн, соединенных Т-образно и размещенных в днище судна в диаметральной и траверзной плоскостях судна, соответственно, так, что активные поверхности антенн направлены в сторону дна, при излучении разделяют сектор обзора на три перекрывающих сектор обзора подсектора: первый подсектор центральный, второй и третий подсекторы по краям сектора обзора, рассчитывают временные задержки для формирования ХН излучающей антенны в сторону дна в каждый из подсекторов, устанавливают период зондирования сигналов T1 для первого подсектора, генерируют первый сигнал с амплитудой U1 для излучения в первый подсектор, последовательно излучают в сторону дна первый сигнал в первый подсектор, второй сигнал во второй подсектор, третий сигнал в третий подсектор, излучение сигналов производят гидроакустической излучающей антенной с характеристикой направленности (ХН), широкой - в траверзной плоскости судна и узкой - в диаметральной плоскости судна, прием эхосигналов от поверхности дна производят гидроакустической приемной антенной, формирующей статический веер приемных ХН электронным способом, выполняют определение времени запаздывания между моментом излучения и моментом приема эхосигнала для каждой из приемных ХН в каждом цикле зондирования, определяют оценку отстояния от дна для каждой из приемных характеристик направленности в пределах сектора обзора, определяют координаты, курс, скорость движения, углы бортовой и килевой качки судна по внешним источникам информации, оценивают профиль скорости звука в воде, выполняют расчет поправок к полученным отстояниям от дна, определяют истинные глубины путем суммирования полученных отстояний от дна и поправок, регистрируют полученные истинные глубины и их геодезические координаты, отличающийся тем, что устанавливают период зондирования Т2=2Т1 для второго подсектора и третьего подсектора, генерируют второй и третий сигналы с амплитудой U2≥6U1 для излучения во второй и третий подсектора, соответственно, а для определения оценки отстояния от дна производят усреднение отстояний от дна, полученных в первом подсекторе для двух соседних циклов зондирования, формируют значения отстояний от дна в полосе обзора в соответствии с периодом зондирования, установленного для второго подсектора и третьего подсектора.
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2434246C1 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ | 2012 |
|
RU2519269C1 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2340916C1 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2439614C2 |
| Устройство для исследования усилителей сейсморазведочной станции | 1960 |
|
SU136899A1 |
| Способ определения поправок к глубинам, измеренным многолучевым эхолотом при съемке рельефа дна акватории, и устройство для определения поправок к глубинам, измеренным многолучевым эхолотом при съемке рельефа дна акватории | 2019 |
|
RU2724366C1 |
| Захватное устройство | 1987 |
|
SU1426786A1 |

