Изобретение относится к области гидроакустики, и может быть использовано в задачах обнаружения и определения класса объекта при разработке гидроакустических систем.
В системах, использующих методы классификации по анализу шумоизлучения морских объектов, используют признаки, основанные на особенностях спектрального состава сигнала, так называемого портрета. В.С. Бурдик "Анализ гидроакустических систем ". Лен. Судостроение 1988 г. стр. 322
Известен способ обнаружения и классификации, описанный в работе В.В. Деева и др. "Анализ информации оператором-гидроакустиком". Л. Судостроение. 1990 г. стр. 110-111).
Способ содержит следующие операции:
- прием антенной сигналов шумоизлучения морского объекта в аддитивной смеси с помехой
- выделение параметров сигнала шумоизлучения объекта из аддитивной смеси сигнала и помехи S(t)=A(t)+Y(t), где A(t) - мощность сигнала объекта, a Y(t) - мощность помехи (мешающий сигнал)
- деление исходной реализации сигнала S(t) на г отрезков длительности Т;
- вычисление спектра S(ωк) по каждому такому отрезку, т.е. дискретное преобразование Фурье (БПФ) реализации на отрезке конечной длительности Т;
- накопление (усреднение) спектров по r реализациям, - определение усредненной оценки S’(ωk)
- усреднение полученной на предыдущем этапе спектрограммы S’(ωk) по смежным частотам с помощью прямоугольного окна - получение усредненной оценки S’’(ωk);
- определение порога обнаружения α по правилу Неймана-Пирсона при задаваемой вероятности ложного обнаружения Рл.
- нахождение отношения полученных усредненных оценок S’(ωk) и S’’(ωk) и сравнение с пороговым значением α. Превышение порога обнаружения свидетельствует о наличии дискретной составляющей (ДС) на данной частоте. Информация об обнаруженных дискретных составляющих используется при решении задач распознавания (классификации) в качестве одного из основных признаков сигналов шумоизлучения различных объектов.
Для выработки решения о классе объекта проводят анализ обнаруженных ДС и на основе этой информации (значение амплитуд, частот и количество отдельных составляющих; значение начальных частот отдельных звукорядов, количество звукорядов и количество составляющих ЗВР) создают набор классификационных признаков (КП), которые основаны на отличиях наблюдаемых объектов. Любое из известных правил принятия решения по совокупности КП, позволяющих определить принадлежность наблюдаемого объекта к одному из классов, основывается на принципах проверки гипотез и реализуется путем сравнения с порогом отношения правдоподобия [Б.Р. Левин Теоретические основы статистической радиотехники изд. «Советское радио» (книга вторая)1968 г. Стр. 25-32.
Для принятия решения при наличии базы «портретов» объектов, необходимо решить проблему организации перебора эталонных (портретных) описаний, полученных для различных групп спектров, для сравнения их с описанием обнаруженного неизвестного сигнала, который поступил на вход системы классификации, чтобы его классифицировать, Известия Российской Академии Ракетных и Артиллерийских Наук 2010 г №66 стр. 9-14 «Акустическая система дистанционного наблюдения за вертолетами». Акад. РАРАН В.И. Кандратьев, С.В. Новиков, Д.Н. Рассадов.
В упомянутой работе Деева, да и во всех известных системах обнаружения и классификации, цикл боевого управления кораблем включает последовательность из следующих этапов:
обнаружение угрозы для корабля (например, торпеды, иностранной подводной лодки, противолодочного самолета или вертолета).
Этап обнаружения длится от десятков секунд до единиц минут.
С момента принятия решения об обнаружении цели начинается ее классификация. На данном этапе осуществляется статистическая проверка нескольких альтернативных гипотез (по числу классов в заданном алфавите распознаваемых классов). Длительность данного этапа может варьироваться от десятков секунд до десятков минут. Определение класса цели дает возможность командиру корабля принять решение об обнаружении угрозы и начать выработку плана противодействия этой угрозе.
Таким образом, недостатком известных способов является то, что для выработки и принятия командиром эффективного плана противодействия обнаруженной угрозе может занять весьма продолжительное время, а поскольку это время оказывает существенное влияние на боевую устойчивость корабля нужно искать пути его сокращения.
Задачей настоящего изобретения является сокращение времени классификации обнаруженного объекта, что обеспечит сокращение времени боевого управления (БУ) руководителем (командиром) корабля-носителя, что позволит сократить время обнаружения угрозы для корабля (подводной лодки) и, как следствие, повысить его боевую устойчивость.
Технический результат изобретения заключается в обеспечении решения задачи классификации в процессе обнаружения цели, т.е. на одном временном цикле.
Для обеспечения указанного технического результата в способ классификации гидроакустических сигналов шумоизлучения морского объекта, содержащий прием антенной сигналов шумоизлучения морского объекта в аддитивной смеси с помехой, преобразование сигнала в цифровой вид, спектральную обработку принятых сигналов, включающую формирование статического веера характеристик направленности (ХН), накопление полученных спектров мощности, вычисление помехи, определение порога обнаружения, создание базы спектральных портретов, введены новые признаки, а именно: из накопленных временных последовательностей пространственно-частотного спектра для более простого представления математических операций с помощью числовых операций над элементами матриц формируют матрицу S≡[sij] размерностью m*n, где i-я строка обозначает номер пространственного канала ХН, a j-тый номер столбца обозначает номер частотного отсчета в спектре сигнала. Базу спектральных портретов представляют в виде матрицы B=[bjk] размерностью n*r, где j-я строка обозначает номер частотного отсчета в спектре сигнала, а k-тый столбец представляет портрет объекта из “1” и “0” в зависимости от наличия или отсутствия частот в портрете рассматриваемого диапазона частот; одновременно формируют матрицу помехи П≡[пjk] размерностью m*n, где i-я строка обозначает номер пространственного канала ХН, a j-тый номер столбца обозначает номер частотного отсчета в спектре помех, формируют матрицу  где
где  - сумма амплитуд частотных отсчетов по каждому портрету, входящему в матрицу B=[bjk] на каждом i-том пространственном канале; одновременно формируют матрицу
- сумма амплитуд частотных отсчетов по каждому портрету, входящему в матрицу B=[bjk] на каждом i-том пространственном канале; одновременно формируют матрицу  где
где  являются суммой амплитуд частотных отсчетов уровня помех по каждому портрету, входящему в матрицу B=[bjk] на каждом i-том пространственном канале, Для обнаружения объектов по портретам формируют матрицу S’’ где из элементов матрицы S’≡[s’ik] вычитают значения элементов матрицы П’≡[пik] с одинаковыми значениями индексов и сравнивают со значениями порогов элементов матрицы пороговых значений σ≡[σik], а направление (КУ) и класс обнаруженного объекта на текущий момент времени определяют по значениям элементов матрицы S’’ превысивших соответствующие пороговые значения элементов матрицы σ≡[σik].
являются суммой амплитуд частотных отсчетов уровня помех по каждому портрету, входящему в матрицу B=[bjk] на каждом i-том пространственном канале, Для обнаружения объектов по портретам формируют матрицу S’’ где из элементов матрицы S’≡[s’ik] вычитают значения элементов матрицы П’≡[пik] с одинаковыми значениями индексов и сравнивают со значениями порогов элементов матрицы пороговых значений σ≡[σik], а направление (КУ) и класс обнаруженного объекта на текущий момент времени определяют по значениям элементов матрицы S’’ превысивших соответствующие пороговые значения элементов матрицы σ≡[σik].
Таким образом, предложенный способ обнаружения цели по портрету, т.е совмещение этапа обнаружения, определение направления и классификации цели на одном временном цикле заменяет последовательность таких действий как обнаружение цели, определение параметров, выработка классификационных признаков, почти в два раза сокращает время обнаружения угрозы и дает возможность командиру корабля быстрого реагирования на обнаруженную угрозу.
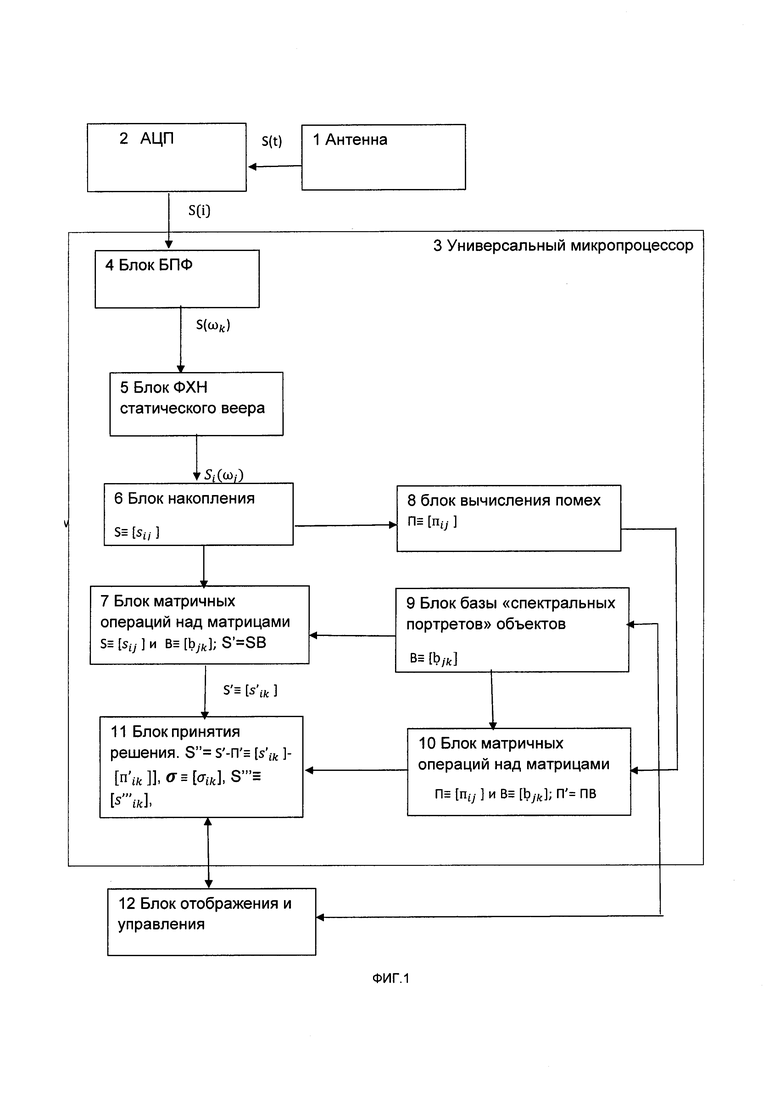
Сущность изобретения поясняется на блок-схеме устройства фиг. 1, реализующего способ.
Устройство, реализующее способ, содержит гидроакустическую антенну 1, которая соединена через аналого-цифровой преобразователь 2 (АЦП) с универсальным микропроцессором 3. В состав универсального микропроцессора входят последовательно соединенные блок 4 БПФ выход, которого соединен с блоком 5 формирования характеристик направленности (СФХН) статического веера, выход блока 5 соединен с входом блока 6 накопления. Один выход блока 6 соединен с блоком 7 матричных операций над матрицами, второй выход соединен с блоком 8 вычисления помех. Из блока 9 базы «спектральных портретов» в блок 7 и в блок 10 матричных операций поступает информация в виде матрицы по портретам. Выход блока 8 соединен с входом блока 10 матричных операций. Выход блока 7 и выход блока 10 соединен с блоком 11 принятия решения. Выход блока 11 соединен с блоком 12 отображения и управления. Выход блока 12 соединен с входом блока 9 для выбора базы портретов, поступающих в блок 7 и блок 10 и блоком 11 для управления величиной порога.
Блок 2 может быть выполнен так, как это описано в Справочнике «Цифровая обработка сигналов» изд. Радио и связь 1985 г, стр. 91. Блок 3 универсального микропроцессора с блоками 4 и 5 могут быть реализованы, как описано в книге Ю.А. Корякин, С.А. Смирнов, Г.В. Яковлев «Корабельная гидроакустика», Санкт-Петербург: Наука, 2004 г., Стр. 248-250, 284. Блок 6 описан, например, в книге А.А. Харкевича «Борьба с помехой» изд. Наука, Москва 1965 г, стр. 70-71. Спектр мощности сигнала с помехой с накопителя на текущий момент времени записывается в матричном виде, как например, описано в книге Л.Л. Мясникова, Е.Н. Мясникова «автоматическое распознавание звуковых образов» «Энергия» Ленинградское отделение 1970 г. Стр. 133-134. В блоке 8 оценивается помеха на текущий момент времени, как например, описано в статье Иваненков А.С., Родионов А.А., Турчин В.И. Оценка уровня фонового шума с помощью горизонтальной антенной решетки на фоне пространственно некоррелированной и структурной помех // Акустический журнал. 2013. Т. 59. №2. С. 202-210
Блок 9 базы «спектральных портретов» объектов, может быть реализован на основе современного универсального микропроцессора, обладающего способностью работать в реальном времени, возможностью перехода с одной задачи на другую, наличием гибкой адресации к памяти, большой скоростью обработки данных. Ю.А. Корякин, С.А. Смирнов, Г.В. Яковлев «Корабельная гидроакустическая техника», СПб, изд. «Наука», 2004 г. Стр. 284. В блоках 7 и 10 используется аппарат матриц для числовых операций над элементами матриц. См. Г. Корн и Т. Корн Справочник по математике для научных работников и инженеров. Изд. «Наука» Москва 1977 г. Стр. 390-392 В блоке 11 формируется матрица обнаруженных по портрету целей с определением класса и направлением на цель S’’≡[s’’ik]. Выработка решения об обнаружении цели может быть реализован как например описано в книге Л.С. Гутина «Теория оптимальных методов радиоприема при флуктуационных помехах», Москва «Советское радио», стр. 247-253. Блок 12 может быть выполнен так, как описан в книге Ю.А. Корякин, С.А. Смирнов, Г.В. Яковлев «Корабельная гидроакустика», Санкт-Петербург: Hayка, 2004 г., Стр. 255-261.
Реализация способа с помощью устройства, представленного на блок-схеме, производится следующим образом.
Сигналы Si(t) приемных каналов антенны поступают на АЦП, сигнал Si(k) из АЦП в виде дискретных отсчетов поступает соответственно в универсальный микропроцессор 3. В блок 5 из блока 4 поступают отсчеты реализации комплексного спектра сигнала для каждого элемента антенны для формирования характеристик направленности статического веера, а с выхода блока 5 в блок 6 поступают временные последовательности пространственно-частотных спектров мощности  с веера характеристик направленности. Из накопленных временных последовательностей спектров мощности
с веера характеристик направленности. Из накопленных временных последовательностей спектров мощности  формируется матрица S≡[sij] размерностью m*n. Каждый элемент матрицы
формируется матрица S≡[sij] размерностью m*n. Каждый элемент матрицы  равен мощности сигнала с помехой
равен мощности сигнала с помехой  в i-ом пространственном канале ХН на j-ом частотном отсчете на текущий момент времени. Одновременно в блоке 8 формируют матрицу помех
в i-ом пространственном канале ХН на j-ом частотном отсчете на текущий момент времени. Одновременно в блоке 8 формируют матрицу помех  размерностью m*n, где i-я строка обозначает номер пространственного канала ХН, a j- тый номер столбца обозначает номер частотного отсчета в спектре помехи. Каждый элемент матрицы П≡[пij] равен мощности помехи
размерностью m*n, где i-я строка обозначает номер пространственного канала ХН, a j- тый номер столбца обозначает номер частотного отсчета в спектре помехи. Каждый элемент матрицы П≡[пij] равен мощности помехи  в i-ом пространственном канале на j-ом частотном отсчете на текущий момент времени.
в i-ом пространственном канале на j-ом частотном отсчете на текущий момент времени.
База спектральных портретов задается в виде матрицы B≡[bjk] размерностью n*r, где j-я строка обозначает номер частотного отсчета в спектре сигнала, а. k-тый столбец представляет портрет объекта. Каждый элемент матрицы.  равен “1” или “0” в зависимости от наличия или отсутствия частоты рассматриваемого диапазона частот на данном j-том частотном отсчете в k-том портрете.
равен “1” или “0” в зависимости от наличия или отсутствия частоты рассматриваемого диапазона частот на данном j-том частотном отсчете в k-том портрете.
Для обнаружения целей по спектральным портретам (т.е. обнаружения цели определенного класса) в блоке 7 матрицу S, пространственно-частотных спектров мощности, а в блоке 10 матрицу П помех умножают на матрицу. В спектральных портретов. Тогда в блок 11 для принятия решения поступает матрица  где каждый элемент матрицы
где каждый элемент матрицы  - сумма мощностей частотных отсчетов сигнала с помехой по каждому портрету, входящему в матрицу B=[bjk] на каждом i-том пространственном канале; и матрица
- сумма мощностей частотных отсчетов сигнала с помехой по каждому портрету, входящему в матрицу B=[bjk] на каждом i-том пространственном канале; и матрица  [п’ik], где каждый элемент матрицы
[п’ik], где каждый элемент матрицы  является суммой уровней мощности помехи на частотных отсчетах по каждому портрету, входящему в матрицу B=[bjk] на каждом i-том пространственном канале на текущий момент времени. В блоке 11 формируется матрица S’’=S’-П’, где каждый элемент матрицы [s’’i,k]=[s’ik]-[п’ik] равен разности мощности сигнала с помехой минус мощность помехи для каждого к-ого портрета на i-том направлении. При заданной вероятности ложной тревоги (Рл.т). по критерию Неймана Пирсона рассчитывается матрица порогов σ≡[σik] Значения элементов матрицы S’’≡[s’’ik] сравнивают с соответствующими элементами матрицы σ≡[σik], пороговых значений, формируют матрицу S’’’≡[s’’’ik], где каждый элемент матрицы s’’’ik=s’’ik при условии, что s’’ik>σik, или s’’ik=0 при условии, что s’’≤σik Курсовой угол (КУ). обнаруженного объекта и класс (портрет) в данный момент времени определяется по значениям элементов матрицы S’’’≡[s’’’ik], превысившим порог s’’ik>σik, где i-я строка обозначает номер пространственного канала ХН (курсовой угол), а k-тый столбец представляет портрет (класс) обнаруженного объекта.
является суммой уровней мощности помехи на частотных отсчетах по каждому портрету, входящему в матрицу B=[bjk] на каждом i-том пространственном канале на текущий момент времени. В блоке 11 формируется матрица S’’=S’-П’, где каждый элемент матрицы [s’’i,k]=[s’ik]-[п’ik] равен разности мощности сигнала с помехой минус мощность помехи для каждого к-ого портрета на i-том направлении. При заданной вероятности ложной тревоги (Рл.т). по критерию Неймана Пирсона рассчитывается матрица порогов σ≡[σik] Значения элементов матрицы S’’≡[s’’ik] сравнивают с соответствующими элементами матрицы σ≡[σik], пороговых значений, формируют матрицу S’’’≡[s’’’ik], где каждый элемент матрицы s’’’ik=s’’ik при условии, что s’’ik>σik, или s’’ik=0 при условии, что s’’≤σik Курсовой угол (КУ). обнаруженного объекта и класс (портрет) в данный момент времени определяется по значениям элементов матрицы S’’’≡[s’’’ik], превысившим порог s’’ik>σik, где i-я строка обозначает номер пространственного канала ХН (курсовой угол), а k-тый столбец представляет портрет (класс) обнаруженного объекта.
Таким образом, предложенный способ обнаружения цели по портрету, т.е совмещение этапа обнаружения и классификации цели на одном временном цикле заменяет последовательность таких действий как обнаружение цели, определение параметров, выработку классификационных признаков, почти в два раза сокращает время обнаружения угрозы и дает возможность командиру корабля быстрого реагирования на обнаруженную угрозу.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КЛАССИФИКАЦИИ ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ ШУМОИЗЛУЧЕНИЯ МОРСКОГО ОБЪЕКТА | 2015 |
|
RU2603886C1 |
| Способ классификации шумоизлучения морского объекта | 2021 |
|
RU2776958C1 |
| Способ отображения гидроакустической информации | 2019 |
|
RU2736188C1 |
| Способ классификации гидроакустических сигналов шумоизлучения морского объекта | 2020 |
|
RU2759498C1 |
| СПОСОБ КЛАССИФИКАЦИИ ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ ШУМОИЗЛУЧЕНИЯ МОРСКОГО ОБЪЕКТА | 2013 |
|
RU2546851C1 |
| Способ отображения гидроакустической информации | 2019 |
|
RU2733938C1 |
| Способ классификации гидроакустических сигналов шумоизлучения морской цели | 2023 |
|
RU2810699C1 |
| Способ классификации гидроакустических сигналов шумоизлучения морских объектов | 2018 |
|
RU2711406C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ШУМЯЩЕГО В МОРЕ ОБЪЕКТА | 2016 |
|
RU2624798C1 |
| Способ классификации гидроакустических сигналов шумоизлучения морского объекта | 2022 |
|
RU2801677C1 |
Изобретение относится к области гидроакустики и может быть использовано в задачах обнаружения и классификации объекта при разработке гидроакустических систем. Технический результат изобретения заключается в сокращении времени классификации обнаруженного объекта, что позволит сократить время обнаружения угрозы для корабля и, как следствие, повысить его боевую устойчивость. Результат достигается тем, что в предложенном способе обнаружение объекта происходит по спектральному портрету, т.е. последовательность таких действий, как обнаружение цели, определение параметров, выработка классификационных признаков заменяется совмещением этапа обнаружения, определение направления и классификации цели на одном временном цикле, что почти в два раза сокращает время обнаружения угрозы и дает возможность командиру корабля быстрого реагирования на обнаруженную угрозу. 1 ил.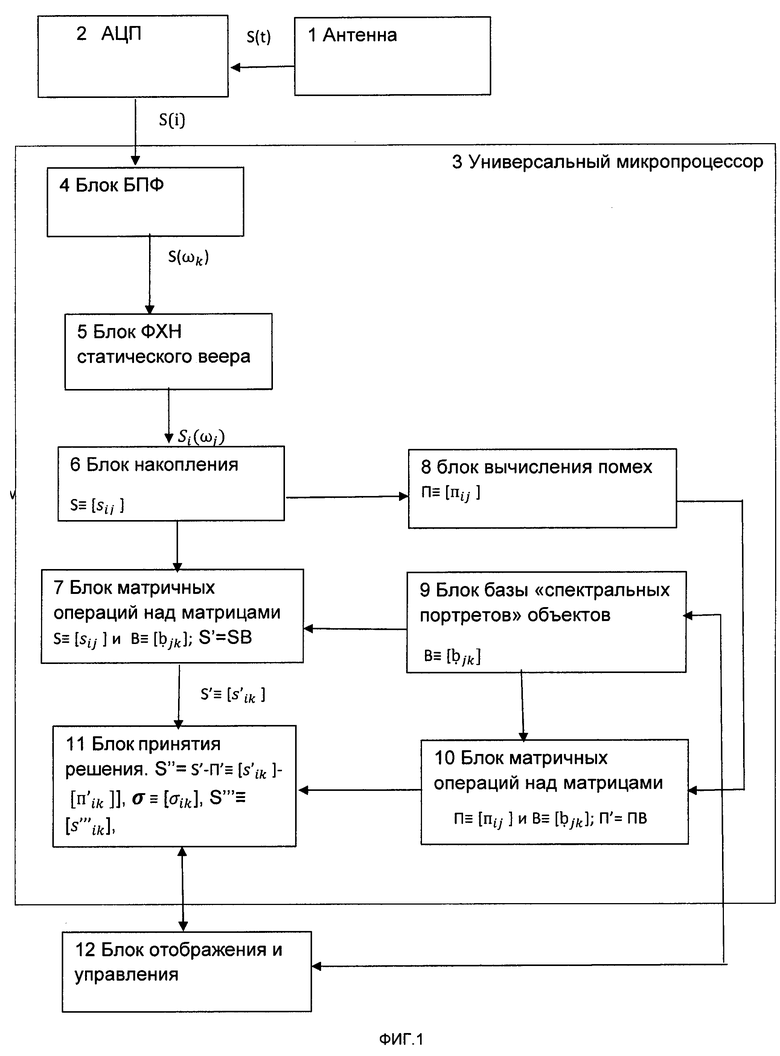
Способ классификации гидроакустических сигналов шумоизлучения морского объекта, содержащий прием антенной сигналов шумоизлучения морского объекта в аддитивной смеси с помехой, преобразование сигнала в цифровой вид, спектральную обработку принятых сигналов, включающую формирование статического веера характеристик направленности (ХН), накопление полученных спектров мощности S(ωk)2, вычисление помехи, определение порога обнаружения, создание базы спектральных портретов, при котором из накопленных временных последовательностей пространственно-частотного спектра формируют матрицу S≡[sij] размерностью m*n, где i-я строка обозначает номер пространственного канала ХН, а j-й номер столбца обозначает номер частотного отсчета в спектре сигнала; базу спектральных портретов формируют в виде матрицы B=[bjk] размерностью n*r, где j-я строка обозначает номер частотного отсчета в спектре сигнала, а k-й столбец представляет портрет объекта в виде "1" или "0" в зависимости от наличия или отсутствия частот рассматриваемого диапазона частот в портрете; перемножают матрицу S≡[sij] на матрицу В≡[bjk], формируя матрицу S’≡[s’ik], где  - сумма амплитуд частотных отсчетов по каждому портрету, входящему в матрицу B=[bjk] на каждом i-м пространственном канале; одновременно формируют матрицу помехи П≡[пik] размерностью m*n, где i-я строка обозначает номер пространственного канала ХН, а j-й номер столбца обозначает номер частотного отсчета в спектре помех, формируют матрицу S’=SB≡[s’ik], где
- сумма амплитуд частотных отсчетов по каждому портрету, входящему в матрицу B=[bjk] на каждом i-м пространственном канале; одновременно формируют матрицу помехи П≡[пik] размерностью m*n, где i-я строка обозначает номер пространственного канала ХН, а j-й номер столбца обозначает номер частотного отсчета в спектре помех, формируют матрицу S’=SB≡[s’ik], где  - сумма амплитуд частотных отсчетов по каждому портрету, входящему в матрицу B=[bjk] на каждом i-м пространственном канале; одновременно формируют матрицу П’=ПВ≡[п’ik], где
- сумма амплитуд частотных отсчетов по каждому портрету, входящему в матрицу B=[bjk] на каждом i-м пространственном канале; одновременно формируют матрицу П’=ПВ≡[п’ik], где  являются суммой амплитуд частотных отсчетов уровня помех по каждому портрету, входящему в матрицу B=[bjk] на каждом i-м пространственном канале, для обнаружения морского объекта по портретам формируют матрицу S’’, где из элементов матрицы S’≡[s’ik] вычитают элементы матрицы П’≡[пik] с одинаковыми значениями индексов и сравнивают со значениями порогов элементов матрицы пороговых значений σ≡[σik], а направление (КУ) и класс обнаруженного объекта на текущий момент времени определяют по значениям элементов матрицы S’’’, превысившим соответствующие пороговые значения элементов матрицы σ≡[σik].
являются суммой амплитуд частотных отсчетов уровня помех по каждому портрету, входящему в матрицу B=[bjk] на каждом i-м пространственном канале, для обнаружения морского объекта по портретам формируют матрицу S’’, где из элементов матрицы S’≡[s’ik] вычитают элементы матрицы П’≡[пik] с одинаковыми значениями индексов и сравнивают со значениями порогов элементов матрицы пороговых значений σ≡[σik], а направление (КУ) и класс обнаруженного объекта на текущий момент времени определяют по значениям элементов матрицы S’’’, превысившим соответствующие пороговые значения элементов матрицы σ≡[σik].
| СПОСОБ ОБРАБОТКИ ЭХОСИГНАЛА ГИДРОЛОКАТОРА | 2013 |
|
RU2528556C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ КЛАССИФИКАЦИИ | 2011 |
|
RU2461020C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ШУМЯЩИХ В МОРЕ ОБЪЕКТОВ | 2007 |
|
RU2339050C1 |
| СПОСОБ КЛАССИФИКАЦИИ ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ ШУМОИЗЛУЧЕНИЯ МОРСКОГО ОБЪЕКТА | 2015 |
|
RU2603886C1 |
| CN 109738050 A, 10.05.2019. | |||

