Изобретение относится к средствам управления пневмоцилиндром и может быть использовано в пневматических системах автоматического управления.
Известно устройство управления технологическим процессом, содержащее преобразователь положения, снабженный первым и вторым контактами и датчиком положения, который изменяет токовый сигнал, исходя из положения исполнительного механизма, соединенного с клапаном, электрический разъединитель, снабженный первым, вторым и третьим контактами, а также сопротивлением, подключенным между первым и вторым контактами электрического разъединителя, причем третий контакт электрического разъединителя соединен со вторым контактом преобразователя положения, и электропневматический контроллер, снабженный первым контактом, соединенным с первым контактом преобразователя положения и первым контактом электрического разъединителя, и вторым контактом, соединенным с потенциалом заземления и со вторым контактом электрического разъединителя, причем электропневматический контроллер получает питание от источника тока, который электрически отделен от электрического разъединителя (RU 2554536, G05B 19/44, 27.06.2015).
Известное устройство управления технологическим процессом обеспечивает возможность коммуникативной связи преобразователя положения с электропневматическим контроллером без переналадки схемы управления и/или процесса в электропневматическом контроллере и обеспечивает исключение создания контуров заземления между электропневматическим контроллером и преобразователем положения.
В известном устройстве не учитываются все факторы, влияющие на точность управления, а также в нем не предусмотрен режим ручного управления.
В качестве прототипа выбрано устройство управления пневмоцилиндром, содержащее пневмоцилиндр, распределитель, пневмоусилитель, триггер с раздельными входами, построенный на струйных дискретных моностабильных элементах, управляемый кнопками «Пуск» и «Стоп», триггер со счетным входом, переключение которого происходит при подаче на его счетный вход сигнала нулевого уровня, а также струйный логический элемент «И» и настроечный дроссель, причем линия выхлопа распределителя соединена с входом настроечного дросселя и счетным входом триггера со счетным входом, выход триггера с раздельными входами, сигнал единичного уровня на котором устанавливается при нажатии кнопки «Стоп», соединен с установочным входом триггера со счетным входом, второй выход триггера с раздельными входами соединен с входом элемента «И», выход триггера со счетным входом, сигнал единичного уровня на котором устанавливается при подаче сигнала единичного уровня на его установочный вход, соединен со вторым входом элемента «И», выход элемента «И» соединен с входом пневмоусилителя, а выход настроечного дросселя сообщается с атмосферой (RU 2355011, G05B 19/44, 10.05.2009).
Известное устройство управления пневмоцилиндром обладает широкими функциональными возможностями, так как возврат поршня может осуществляться при останове в любом промежуточном положении, которое может определяться, например, положением упора, который препятствует выдвижению штока. Формирование команды на реверсирование происходит без участия конечных выключателей, роль которых выполняет струйный триггер со счетным входом, что позволило упростить конструкцию и повысить надежность.
Однако отсутствие в известном устройстве контроля давления в пневмосистеме и напряжения питания не позволяет получить требуемую точность управления, а отсутствие средств ручного управления снижает функциональные возможности устройства.
Технический результат изобретения заключается в повышении точности управления пневмоцилиндром и расширении функциональных возможностей устройства.
Технический результат достигается тем, что устройство управления пневмоцилиндром согласно изобретению содержит установленный на управляющем устройстве модуль управления, выполненный на микропроцессоре и соединенный с коннектором, ответная часть которого установлена на силовой плате пневмоцилиндра, к соответствующим выводам ответной части коннектора подключены вход формирователя сигнала управления, выход которого предназначен для подключения к управляющему входу пневмоцилиндра, выход формирователя цифрового сигнала считывания нажатия педали управления, вход которого подключен к датчику положения педали управления, датчик тока пневмоцилиндра, датчик напряжения питания устройства, датчик давления пневмосистемы и выход формирователя цифрового сигнала срабатывания датчика, вход которого посредством делителя напряжения соединен с концевым датчиком пневмоцилиндра.
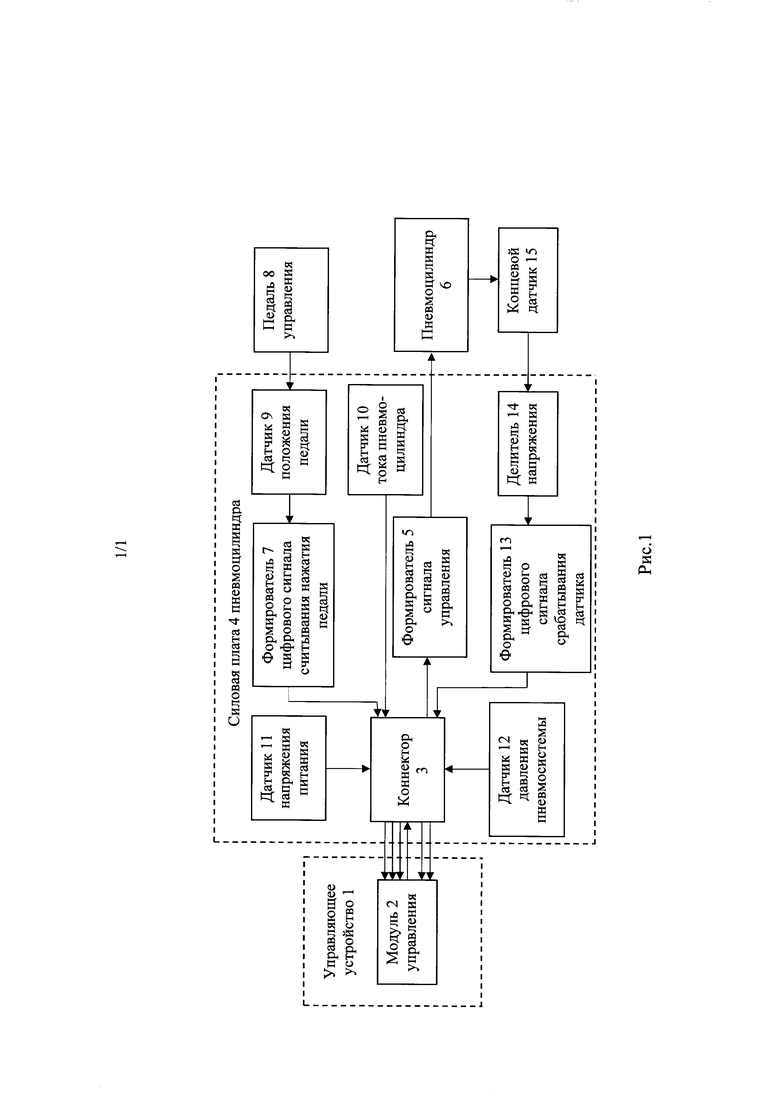
На Рис. 1 приведена функциональная схема устройство управления пневмоцилиндром.
Устройство управления пневмоцилиндром, содержит установленный на управляющем устройстве 1 модуль 2 управления, выполненный на микропроцессоре и соединенный с коннектором 3, ответная часть которого установлена на силовой плате 4 пневмоцилиндра, к соответствующим выводам ответной части коннектора 3 подключены вход формирователя 5 сигнала управления, выход которого предназначен для подключения к управляющему входу пневмоцилиндра 6, выход формирователя 7 цифрового сигнала считывания нажатия педали 8 управления, вход которого подключен к датчику 9 положения педали 8 управления, датчик 10 тока пневмоцилиндра, датчик 11 напряжения питания устройства, датчик 12 давления пневмосистемы и выход формирователя 13 цифрового сигнала срабатывания датчика, вход которого посредством делителя 14 напряжения соединен с концевым датчиком 15 пневмоцилиндра.
Устройство управления пневмоцилиндром работает следующим образом.
Обработка информации, поступающей от датчика 12 давления пневмосистемы, датчика 10 тока пневмоцилиндра, который позволяет измерять ток впрыска для дальнейшего его пересчета в энергию пара, концевого датчика 15 пневмоцилиндра и датчика 11 напряжения питания устройства, осуществляется микропроцессором модуля 2 управления, установленного на управляющем устройстве 1. Информация о срабатывании концевого датчика 15 пневмоцилиндра для ее обработки микропроцессором передается через формирователь 13 цифрового сигнала срабатывания датчика, который преобразует сигнал датчика в вид, необходимый для его восприятия микропроцессором. Для уменьшения величины сигнала с концевого датчика 15 до требуемого значения входного сигнала, необходимого для работы формирователя 13, использован делитель напряжения, представляющий собой резисторный делитель напряжения. Соединение модуля 2 управления с техническими средствами, размещенными на силовой плате 4 пневмоцилиндра, посредством коннектора 3 позволяет более гибко изменять систему и оперативно решать задачу устранения неисправности путем замены вышедшего из строя узла. После обработки поступившей информации микропроцессор модуля 2 управления с учетом всех измеренных параметров вырабатывает сигнал, который поступает на вход формирователя 5, формирующий сигнал управления, подаваемый на управляющий вход пневмоцилиндра 6. Под воздействием сигнала управления происходит требуемое перемещение поршня пневмоцилиндра 6. Поскольку при формировании управляющего сигнала помимо информации от концевого датчика пневмоцилиндра учитывается давление в пневмосистеме, ток пневмоцилиндра и напряжение питания устройства (его нестабильность), точность управления пневмоцилиндром значительно повышается. Для реализации режима ручного управления предусмотрена педаль 8 управления, при нажатии которой срабатывает датчик 9 положения педали, сигнал с которого поступает на формирователя 7 цифрового сигнала считывания нажатия педали 8 управления. Сформированный цифровой сигнал считывания через коннектор 3 поступает в микропроцессор модуля 2 управления, который производит его обработку совместно со всеми другими измеренными параметрами. Последующее формирование сигнала управления пневмоцилиндром осуществляется формирователем 5 в зависимости от результатов обработки микропроцессором всех измеренных параметров. Используемый режим ручного управления позволил расширить функциональные возможности устройства.
Таким образом, в предлагаемом устройстве в процессе управления пневмоцилиндром в парогенераторе осуществляется контроль конца хода поршня, давления в пневмосистеме и тока впрыска для дальнейшего пересчета в энергию пара и контроль источника питания устройства, что в целом позволило значительно повысить точность управления, а дополнительное использование режима ручного управления и коннектора, позволяющего использование различных типов модулей управления, выполненных на микропроцессоре, и оперативную их замену в случае неисправности обеспечило значительное расширение функциональных возможностей.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления нагревателем парогенератора | 2022 |
|
RU2802114C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПНЕВМАТИЧЕСКИМ ПРИВОДОМ МЕХАНИЧЕСКОЙ СТУПЕНЧАТОЙ КОРОБКИ ПЕРЕДАЧ | 2006 |
|
RU2327203C2 |
| ПРИВОД СЦЕПЛЕНИЯ | 2013 |
|
RU2541603C1 |
| Система автоматического управления работой карбюраторного двигателя в динамическом режиме самостоятельного холостого хода | 2019 |
|
RU2705350C1 |
| МНОГОФУНКЦИОНАЛЬНОЕ ОТЛАДОЧНОЕ УСТРОЙСТВО ДЛЯ МИКРОПРОЦЕССОРНЫХ СИСТЕМ | 2016 |
|
RU2634197C1 |
| Устройство управления двигателем на принудительном холостом ходу | 1990 |
|
SU1776854A1 |
| СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОПНЕВМАТИЧЕСКИМ ПРИВОДОМ МЕХАНИЧЕСКОЙ СТУПЕНЧАТОЙ КОРОБКИ ПЕРЕДАЧ | 2008 |
|
RU2374092C1 |
| МОДЕЛИРУЮЩИЙ КОАП | 2013 |
|
RU2516703C1 |
| АППАРАТ ЦИКЛИЧЕСКОГО СЖАТИЯ "ТУРБОЦИКЛ" | 2004 |
|
RU2262913C1 |
| Многоканальное регистрирующее устройство | 1988 |
|
SU1698899A1 |
Изобретение относится к средствам управления пневмоцилиндром и может быть использовано в пневматических системах автоматического управления. Устройство управления пневмоцилиндром содержит установленный на управляющем устройстве модуль управления, выполненный на микропроцессоре и соединенный с коннектором, ответная часть которого установлена на силовой плате пневмоцилиндра, к соответствующим выводам ответной части коннектора подключены вход формирователя сигнала управления, выход которого предназначен для подключения к управляющему входу пневмоцилиндра, выход формирователя цифрового сигнала считывания нажатия педали управления, вход которого подключен к датчику положения педали управления, датчик тока пневмоцилиндра, датчик напряжения питания устройства, датчик давления пневмосистемы и выход формирователя цифрового сигнала срабатывания датчика, вход которого посредством делителя напряжения соединен с концевым датчиком пневмоцилиндра. Технический результат изобретения заключается в повышении точности управления пневмоцилиндром и расширении функциональных возможностей устройства. 1 ил.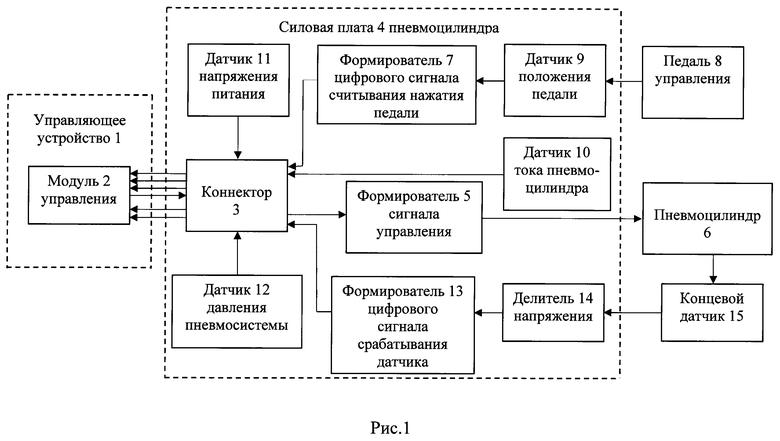
Устройство управления пневмоцилиндром, содержащее установленный на управляющем устройстве модуль управления, выполненный на микропроцессоре и соединенный с коннектором, ответная часть которого установлена на силовой плате пневмоцилиндра, к соответствующим выводам ответной части коннектора подключены вход формирователя сигнала управления, выход которого предназначен для подключения к управляющему входу пневмоцилиндра, выход формирователя цифрового сигнала считывания нажатия педали управления, вход которого подключен к датчику положения педали управления, датчик тока пневмоцилиндра, датчик напряжения питания устройства, датчик давления пневмосистемы и выход формирователя цифрового сигнала срабатывания датчика, вход которого посредством делителя напряжения соединен с концевым датчиком пневмоцилиндра.
| СТРУЙНОЕ УСТРОЙСТВО УПРАВЛЕНИЯ ПНЕВМОЦИЛИНДРОМ | 2007 |
|
RU2355011C2 |
| ГОРЕЛОЧНОЕ УСТРОЙСТВО, ВЫПОЛНЕННОЕ С ВОЗМОЖНОСТЬЮ ОТВОДА ТЕПЛА | 2019 |
|
RU2716761C1 |
| ПНЕВМАТИЧЕСКОЕ ПРОГРАММНОЕ УСТРОЙСТВО | 2010 |
|
RU2427874C1 |

