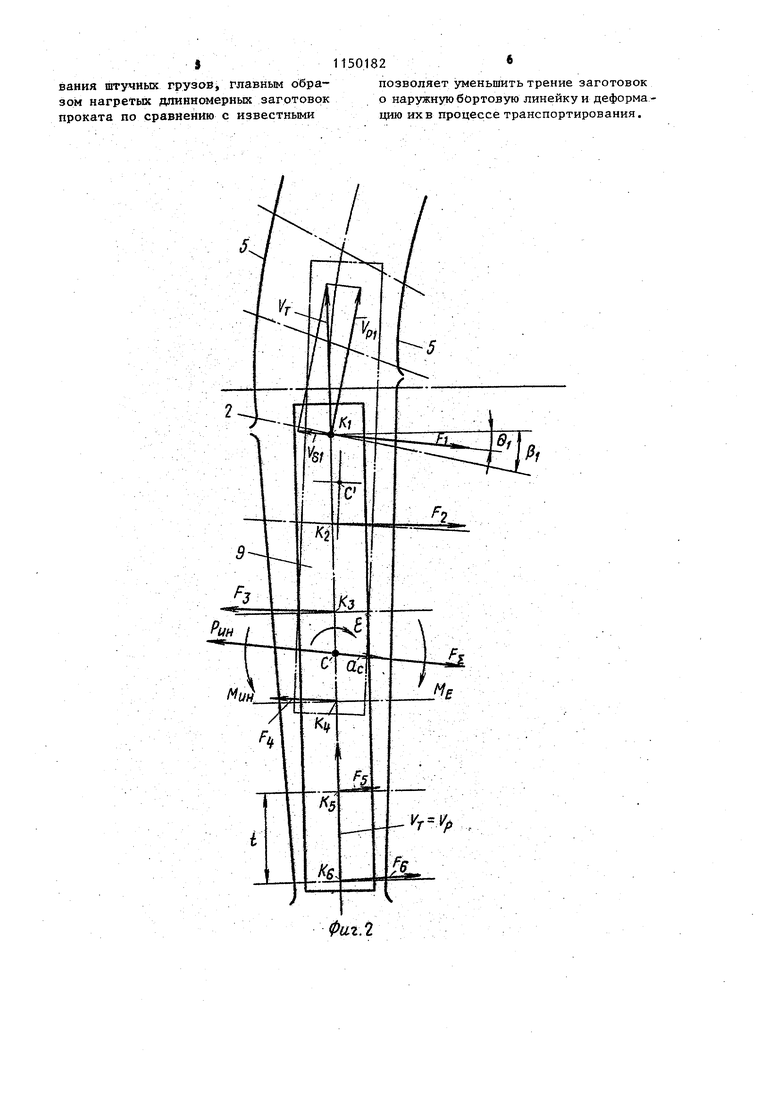
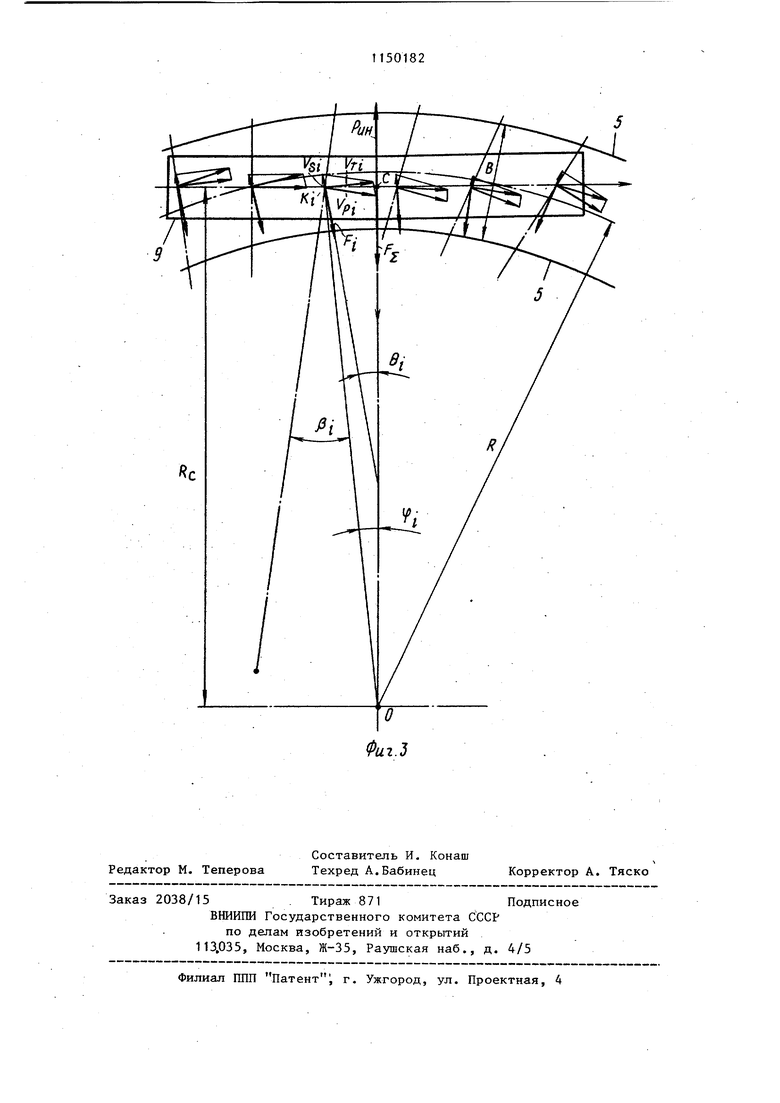
Изобретение относится к промьшшен ному транспорту, а именно к рольгангам для транспортирования штучных грузов, преимущественно нагретых заг товок проката, и может быть использовано в трубопрокатных агрегатах, например, для подачи нагретых заготовок от нагревательной печи к прошивному стану. Известен рольганг для транспортирования штучных грузов, содержаощй приводные цилиндрические ролики и .. бортовые линейки, расположенные на криволинейном участке трассы рольганга. Оси роликов такого рольганга направлены вдоль нормалей к центральной кривой. Однако при перемещении груз, стре мясь сохранить прямолинейное движение, скользит по роликам, ударяется о наружную бортовую линейку, теряя при этом ориентацию, и деформируется что особенно недопустимо при транспортировке горячего проката Известен также рольганг для транспортиррвания штучных грузов, преимущественно нагретых заготовок проката содержащий установленные на раме при водные цилиндрические ролн1си, образу ющие прямолинейные и размещенньй меж ду ними криволинейный участки, на кр волинейном из которых ролики размеще ны с разворотом их осей относительно нормалей к центральной кривой рольганга под углом в напракпёнии переме щения заготовки, и бортовые линейки. Угол разворота осей выполняется постоянным. Такая конструкция способствует разворачиванию груза на криволинейном участке, однако не исключает его скольжения и трения о наружную бортовую линейку, что вызывает деформацию заготовок в процессе транспортирования, Цель изобретения - уменьшение деформации заготовок в процессе транспортирования путем уменьшения трения их о наружную бортовую линейку. Поставленная цель достигается TeM что в рольганге для транспортирования штучных грузов, преимущественно нагретых заготовок проката, содержащем установленные на раме приводные цилиндрические ролики, образующие прямолинейные и размещенньй между ними криволинейньш участки, на криво линейном из которых ролики размещены с разворотом их осей относительно нормалей к центральной кривой рольганга под углом в направлении перемещения заготовки, и бортовые линейки, ролики криволинейного участка размещены с переменным углом разворота, увеличивающимся и уменьшающимся со- ответственно от входного прямолинейного участка до средней части криволинейного участка и от последней до выходного прямолинейного участка. На фиг. 1 изображен рольганг, вид в плане; на фиг. 2 - схема скоростей и сил, действующих между транспортирующей заготовкой и роликами на входе криволинейного участка; на фиг. 3 то же, на криволинейном участке. Рольганг для транспортирования штучных грузов содержит установленные на раме (не показана) приводные цилиндрические ролики 1-4 и бортовые линейки 5. Ролики 1 образуют входной прямолинейньш участок 6, а ролики А выходной прямолинейный участок 7. Между прямолинейными участками расположен криволинейный участок 8, ролики 2 и 3 которого размещены с разворотом их осей относительно нормалей к центральной кривой под углом /3 в направлении перемещения заготовки. Угол ft вьтолнен переменным, дискретные значения его постепенно увеличиваются от нуля на входном прямолинейном участке 6 до максимального значения в средней части криволинейного участка, а затем уменьшаются до нуля на выходном прямолинейном участке 7 рольганга. Максимальное значение угла / определяется из соотношения 4 t/R (,, где t - шаг -между роликами, измеренный по центральной кривой рольганга; R - радиус кривизны этой кривой. При углах|3ио|кс 2t/R появляются . силы трения, направленные от центра кривизны, способствующие отклонению транспортируемой заготовки к наружной бортовой линейке и связанной с этим ее деформации. При углахРМЧХС 4t/R соседние ролики своими рамами начинают накладываться друг на друга и их размещение на криволинейном участке станрвится невозможным. Только при значениях силы трения, возникающие в точках 1 контакта транспортируемой заготовки с роликами, будут направлены к центру кривизны центральной линии криволинейного участка рольганга, обеспечивая уменьшение трения заготовки о наружную бортовую линейку и дефорнации их в процессе транспортировки. Ролики криволинейного участка размещены группами, в каждой из которых оси всех роликов пересекаются в одной точке. Рольганг работает следующим образом. Транспортируемая заготовка 9 на участке аб движется прямолинейно со скоростью V± , равной окружной ско рости ролика VP. В показанный на фиг. 2 момент передний конец поступательно движущейся заготовки оказывает на ролике 2, ось которого повер нута относительно осей роликов 1 на угол ,. При этом в точке К, контакта ролика с трубой скорость Vn ролика, перпендикулярная его оси, уже не совпадает со скоростью V-j. по направлению. В результате в точке Ki возникает сила трения F, , направленная против относительной скорости скольжения Viji VT - Vp, , т.е. под углом 9,-i к перпенди-г куляру к направлению движения. Такая же по величине сила F возникает в точке К, в которой ось ролика также повернута по отношению к осям роликов 1 на угол j не пока- ч занный в силу его малости. Появление в .точках Ki и К,, сил тр ния скольжения FJ и Р„ вызьгоает появление в точках К,j .. .Кдреактивных сил трения F4...F, , которые стремятся уравновесить действие сил 7, Мо не могут достичь этого в полной м ре, поскольку ни одна из них не превышает силу FJ . Б результате транспо тируемая заготовка оказывается под воздействием приложенного в ее центре тяжести главного вектора сил трения Fy и главного момента сил трения Mg, т.е. приобретает линейное ускорение а и угловое ускорение Mg/4; , где m и масса заготовки и ее момент инерции. Вектором PJI и стрелой Mj, показаны возникаюпще при этом сила к момент сил инерции. Под действием указанных сил заготовка начинает перемещаться в показанное штих-пукнтиром положение с центром тяжести в точке С , т.е. постепенно переходит на криволинейньй участок рольганга. Схема скоростей и сил, приложенных к заготовке на криволинейном участке рольганга, показана на фиг. 3, где через Vp, обозначены окружные скорости цилиндрических роликов, равные между собой по величине и перпендикулярные осям роликов, через V-r, - линейные скорости различных точек трубы, перпендикулярные и пропорциональные по абсолютной величине радиусом, проведенным в точки контакта К; из центра кривизны траектории О, .относительные скорости скольжения; через F, - силы трения, обратные V5, по направлению и равные между собой по абсолютной величине через q- , j3; и0 - углы, определяющие направление, соответственно векторов V,, Vp. и F с Проектируя скорости, а затем силы F (фиг. 3), можно составить систему уравнений: 2F; Fj -Р„,-} M,(F,-)0; где Руь ™v /E-f. - центробежная сила , инерции J M(-(F ) - момент сил относительно центра тяжести С тра.нс- портируемой заготовки;RJ - соответственно скорость центра тяжести С транспортируемой заготовки и его расстояние до центра кривизны траектории, описывающей установившееся движение заготовки по криволинейному участку рольганга. Из данной системы уравнений- однозначно находятся два неизвестных параметра V и R., определяющие скорость и положение трубы в установившемся движении. Важно подчеркнуть, что рассматриваемое положение транспортируемой заготовки является устойчивым, т.е. при любых малых случайных изменениях Vj. и.К они стремятся вернуться к своим исходным значениям, т.е. заготовка может двигаться практически не касаясь бортов рольганга. Предлагаемая конструкция стационарного рольганга для транспортиреS1150182
вания штучных грузов j главным обра- позволяет уменьшить трение заготовок зом нагретых длинномерных заготовок о наружную бортовую линейку и деформапроката по сравнению с известными дню их в процессе транспортирования.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПОДАЧИ ЗАГОТОВОК | 1992 |
|
RU2028857C1 |
| Устройство для транспортирования штучных грузов по криволинейной трассе | 1980 |
|
SU906828A1 |
| Конвейер для транспортирования штучных грузов | 1990 |
|
SU1795951A3 |
| Стенд для сборки и сварки длинномерных полотнищ прямолинейной и криволинейной форм | 1980 |
|
SU946866A1 |
| Транспортная система для кольцевой подачи грузов | 1983 |
|
SU1183221A1 |
| Устройство для перегрузки штучных грузов | 1990 |
|
SU1708717A1 |
| Способ управления скоростным режимом отводящего рольганга широкополосного стана | 2020 |
|
RU2743177C1 |
| Конвейер для штучных грузов | 1977 |
|
SU709467A1 |
| Устройство для передачи штучных грузов с подающего конвейера на приемный, расположенный к нему под углом | 1990 |
|
SU1734663A1 |
| Скребковый трубчатый конвейер | 1982 |
|
SU1058843A1 |
РОЛЬГАНГ ДЛЯ ТРАНСПОРТИРОВАНИЯ ШТУЧНЫХ ГРУЗОВ, преимущественно нагретых заготовок цроката, содержащий установленные на раме приводные цилиндрические ролики, образующие прямолинейные и размещенный между ними криволинейный участки, на криволинейном из которьк ролики размещены с разворотом их осей относительно нормалей к центральной кривой рольганга под углом в направлении перемещения заготовки, и бортовые линейки, о.тличающийся тем, что, с целью уменьшения деформации заготовок в процессе транспортирования путем уменьшения трения их о наружную бортовую линейку, ролики криволинейного участка размещены с переменным углом разворота, увеличивающимся и уменьшающимся соответственно от входного прямолинейного участка до средней части криволинейного участка ; и от последней до выходного прямо линейного участка.
| Ивановский К.Е | |||
| и др | |||
| Роликовые и дисковые конвейеры и устройства | |||
| М., Машиностроение, 1973, с | |||
| Насос | 1917 |
|
SU13A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Там же, с | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
