[ОБЛАСТЬ ТЕХНИКИ]
[0001] Настоящее изобретение относится к способу управления транспортным средством и устройству управления транспортным средством.
[УРОВЕНЬ ТЕХНИКИ]
[0002] Традиционно известно устройство поддержки движения, которое выполняет поддержку слияния полос движения для рассматриваемого (subject) транспортного средства. Устройство поддержки движения включает в себя: блок поддержки движения, который вычисляет целевую скорость движения целевого транспортного средства в качестве цели управления, когда целевое транспортное средство движется по дороге, которая осуществляет слияние; блок связи, который осуществляет связь с транспортным средством, движущимся по дороге, с которой осуществляется слияние; блок получения диапазона, который получает диапазон обнаружения для обнаружения транспортного средства, которое может достичь точки слияния одновременно с целевым транспортным средством, из числа транспортных средств, движущихся по дороге, с которой осуществляется слияние; и блок установления транспортного средства, который устанавливает по меньшей мере одно из транспортных средств, с которыми возможна связь, в качестве транспортного средства, с которым осуществляется слияние, к которому целевое транспортное средство должно присоединиться впереди упомянутого транспортным средством, когда транспортное средство, которое может осуществлять связь с блоком связи, присутствует в диапазоне обнаружения, полученном блоком получения диапазона (Патентный Документ 1).
[СПИСОК ЦИТИРОВАНИЯ]
[ПАТЕНТНЫЙ ДОКУМЕНТ]
[0003] [Патентный документ 1] JP2017-207812A
[СУЩНОСТЬ ИЗОБРЕТЕНИЯ]
[ПРОБЛЕМА, КОТОРАЯ РЕШАЕТСЯ ИЗОБРЕТЕНИЕМ]
[0004] Однако в вышеупомянутом предшествующем уровне техники, несмотря на то, что поддержка вождения осуществляется исходя из предположения слияния целевого транспортного средства впереди транспортного средства, с которым осуществляется слияние, на практике на позицию вливания и критерии определения вливания транспортного средства влияние оказывает дорожная структура. Таким образом, существует проблема, что вышеупомянутое традиционное устройство поддержки вождения не может выполнить надлежащее управление слиянием.
[0005] Задача, решаемая настоящим изобретением, состоит в том, чтобы обеспечить способ помощи при движении или устройство помощи при движении, которые могут выполнять надлежащее помогающее при слиянии управление.
[СРЕДСТВО ДЛЯ РЕШЕНИЯ ЗАДАЧИ]
[0006] Настоящее изобретение решает вышеуказанную задачу посредством обнаружения дорожной структуры, включающей в себя точку слияния, где сливаются полоса движения, которая осуществляет слияние, и полоса движения, с которой осуществляется слияние, обнаружения состояния другого транспортного средства, движущегося по направлению к точке слияния, установки на основе дорожной структуры позиции вливания относительно движущегося транспортного средства, движущегося по полосе движения, с которой осуществляется слияние, и критерия определения для определения, возможно ли слияние в этой позиции вливания, и определения состояния рассматриваемого транспортного средства, состояния упомянутого другого транспортного средства и критерия определения.
[ЭФФЕКТ ИЗОБРЕТЕНИЯ]
[0007] Согласно настоящему изобретению может выполняться надлежащее управление слиянием.
[КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ]
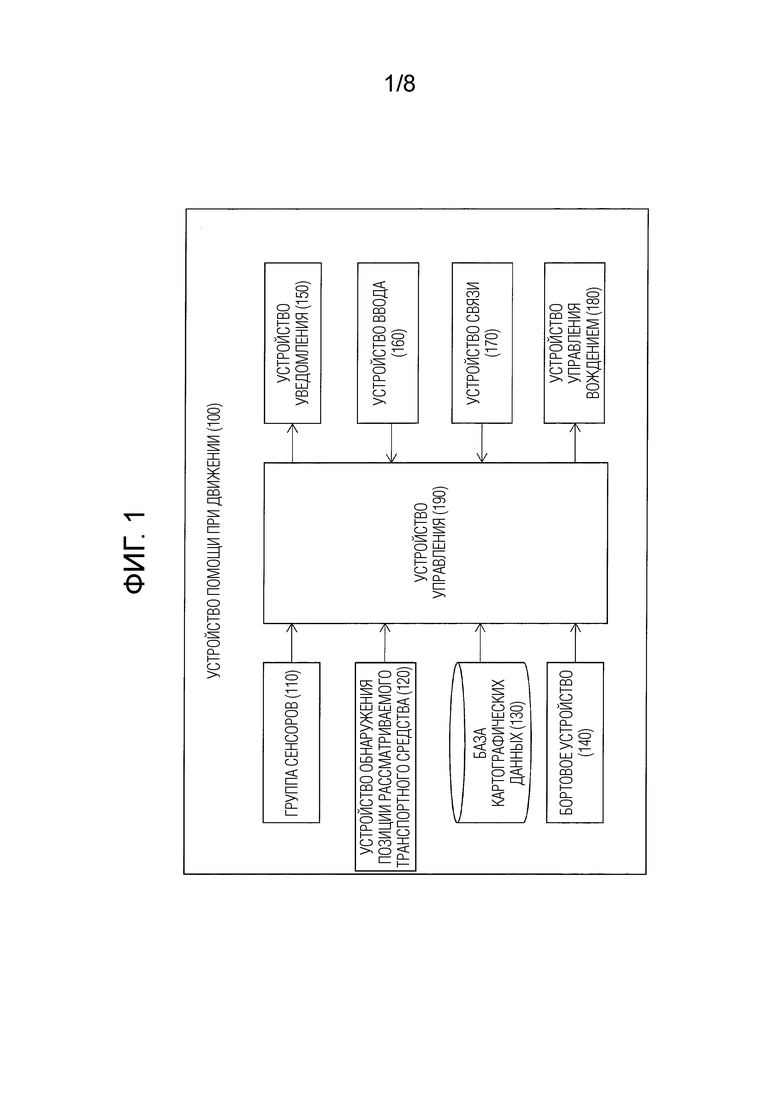
[0008] [ФИГ. 1] ФИГ. 1 представляет собой схему конфигурации, показывающую конфигурацию устройства помощи при движении согласно одному или более вариантам осуществления настоящего изобретения.
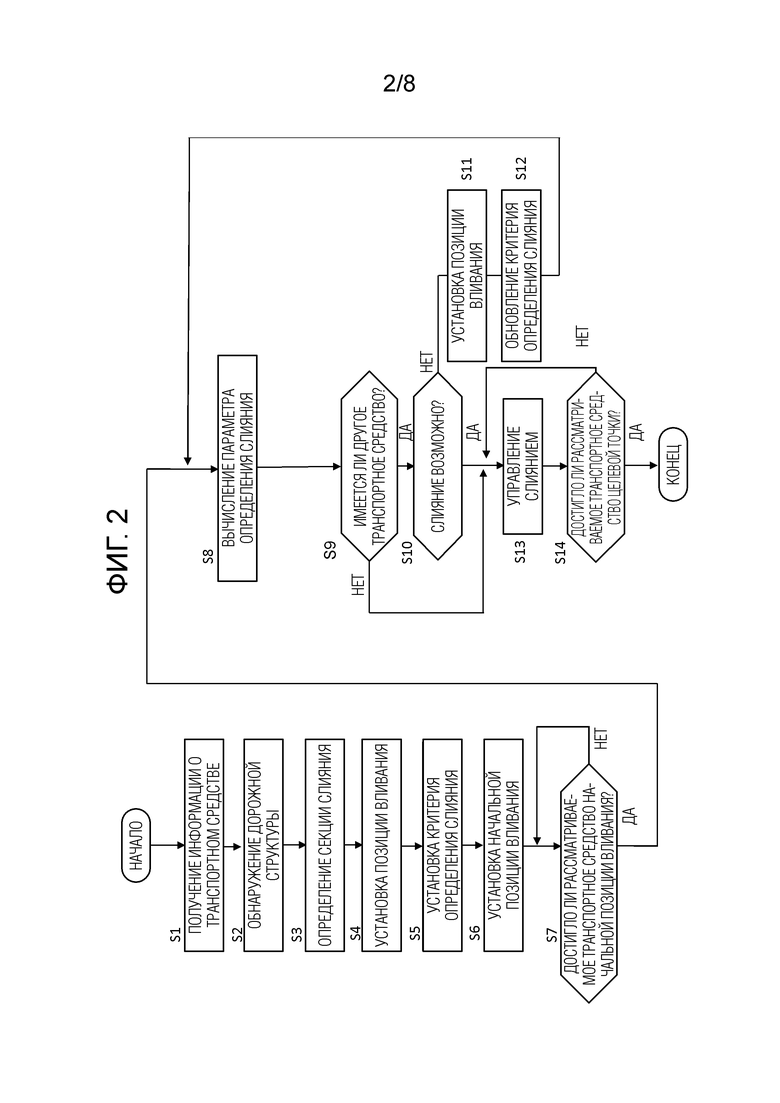
[ФИГ. 2] ФИГ. 2 представляет собой блок-схему, показывающую последовательность операций управления устройства управления.
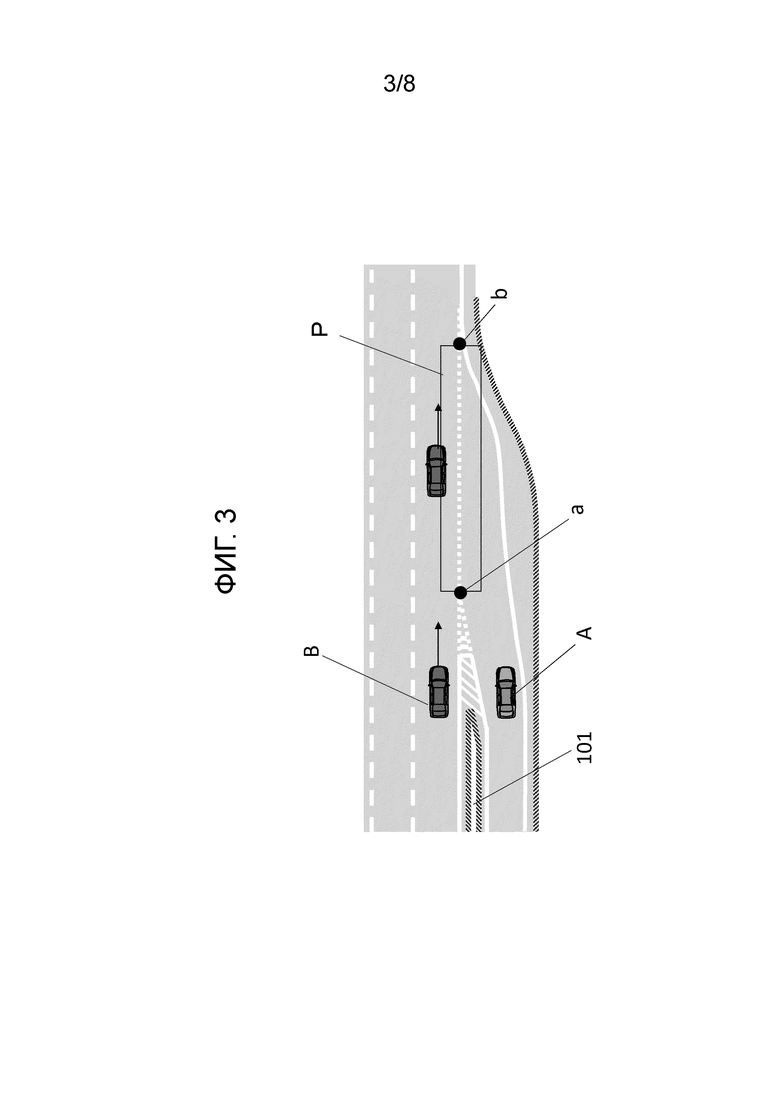
[ФИГ. 3] ФИГ. 3 представляет собой схему для объяснения управления, когда рассматриваемое транспортное средство вливается из полосы движения, которая осуществляет слияние, в смежную полосу движения.
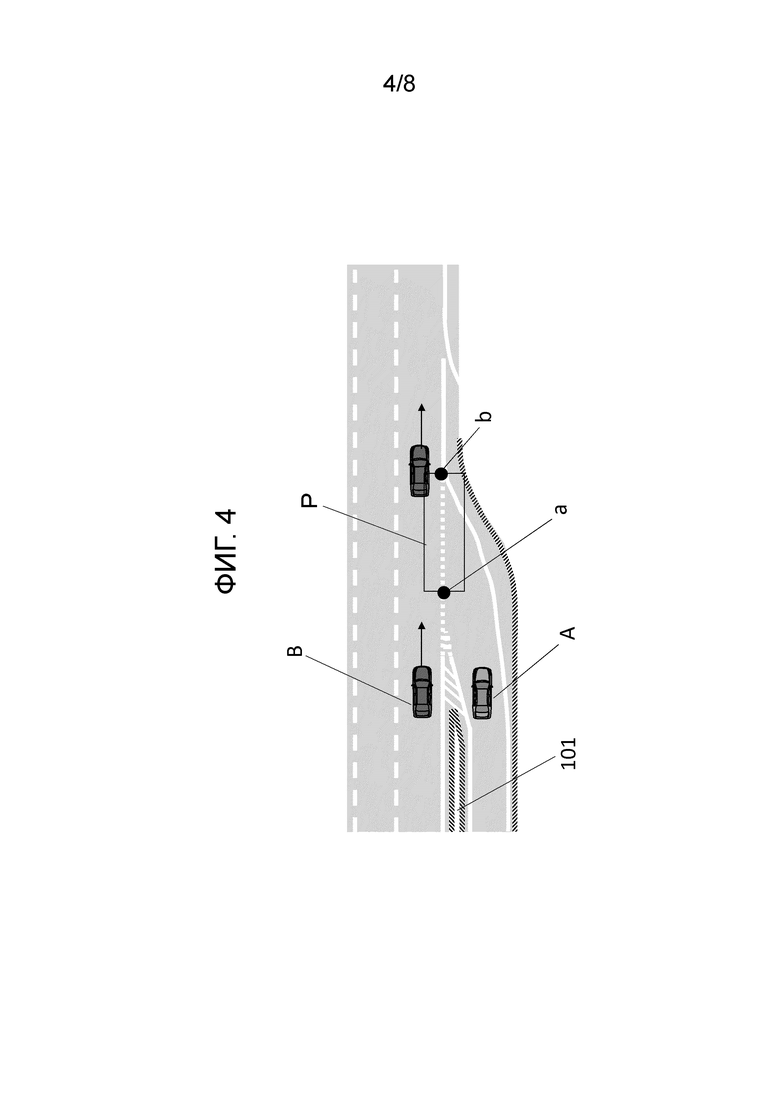
[ФИГ. 4] ФИГ. 4 представляет собой схему для объяснения управления, когда рассматриваемое транспортное средство вливается из полосы движения, которая осуществляет слияние, в смежную полосу движения.
[ФИГ. 5] ФИГ. 5 представляет собой схему для объяснения управления, когда рассматриваемое транспортное средство вливается из полосы движения, которая осуществляет слияние, в смежную полосу движения.
[ФИГ. 6] ФИГ. 6 представляет собой схему для объяснения управления, когда рассматриваемое транспортное средство вливается из полосы движения, которая осуществляет слияние, в смежную полосу движения.
[ФИГ. 7] ФИГ. 7 представляет собой схему для объяснения управления, когда другое транспортное средство вливается из полосы движения, которая осуществляет слияние, в смежную полосу движения.
[ФИГ. 8] ФИГ. 8 представляет собой схему для объяснения управления, когда другое транспортное средство вливается из полосы движения, которая осуществляет слияние, из смежной полосы движения.
[РЕЖИМ(-Ы) ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ]
[0009] В дальнейшем устройство и способ помощи при движении для транспортного средства согласно одному или более вариантам осуществления настоящего изобретения будут описаны со ссылкой на чертежи. В настоящем варианте осуществления настоящее изобретение будет описано на примере устройства помощи при движении, установленного в транспортном средстве.
<<Первый Вариант Осуществления>>
[0010] ФИГ. 1 представляет собой схему, показывающую конфигурацию устройства 100 помощи при движении согласно одному или более вариантам осуществления настоящего изобретения. Как показано на ФИГ. 1, устройство 100 помощи при движении согласно одному или более вариантам осуществления настоящего изобретения включает в себя группу 110 датчиков, устройство 120 обнаружения позиции рассматриваемого транспортного средства, базу 130 картографических данных, бортовое устройство 140, устройство 150 уведомления, устройство 160 ввода, устройство 170 связи, устройство 180 управления вождением и устройство 190 управления (контроллер). Эти устройства соединены посредством CAN (сети контроллеров) и других бортовых LAN для обмена информацией друг с другом.
[0011] Группа 110 датчиков имеет внешний датчик для обнаружения состояния (внешнего состояния) вокруг рассматриваемого (рассматриваемого) транспортного средства и датчик для обнаружения состояния рассматриваемого транспортного средства. Например, группа 110 датчиков включает в себя переднюю камеру для съемки передней области рассматриваемого транспортного средства, заднюю камеру для съемки задней области рассматриваемого транспортного средства, передний радар для обнаружения препятствия перед данным транспортным средством, задний радар для обнаружения препятствие сзади рассматриваемого транспортного средства, боковой радар для обнаружения препятствия сбоку от рассматриваемого транспортного средства, датчик скорости транспортного средства для определения скорости транспортного средства собственно рассматриваемого транспортного средства и установленную внутри транспортного средства камеру для съемки водителя. В качестве группы 110 датчиков может быть конфигурация, использующая один из упомянутого множества вышеописанных датчиков, и может быть конфигурация, использующая комбинацию из датчиков двух или более типов. Результат обнаружения датчика 110 выводится на устройство 190 управления. В результате устройство 190 управления получает внешнюю информацию и информацию о рассматриваемом транспортном средстве.
[0012] Устройство 120 обнаружения позиции рассматриваемого транспортного средства состоит из блока GPS, гиродатчика и датчика скорости транспортного средства и т.п. Устройство 120 обнаружения позиции рассматриваемого транспортного средства обнаруживает радиоволны, передаваемые из множества спутниковых каналов связи посредством блока GPS, и периодически получает информацию о позиции транспортного средства-объекта (рассматриваемого транспортного средства). Затем устройство 120 обнаружения позиции рассматриваемого транспортного средства обнаруживает текущую позицию транспортного средства-объекта на основе полученной информации о позиции транспортного средства-объекта, информации об изменении угла, полученной от гиродатчика, и скорости транспортного средства, полученной от датчика скорости транспортного средства. В дополнение или в качестве альтернативы, устройство 120 обнаружения позиции рассматриваемого транспортного средства может обнаруживать позицию рассматриваемого транспортного средства с использованием хорошо известной техники сопоставления с картой. Информация о позиции транспортного средства-объекта, обнаруженной устройством 120 обнаружения позиции рассматриваемого транспортного средства, выводится в устройство 190 управления.
[0013] База 130 картографических данных хранит картографическую информацию, в том числе информацию о местоположении различных объектов и конкретные местоположения. В картографической информации информация о форме дороги в каждой координате карты, такая как атрибуты кривой, холма, перекрестка, развязки, узкого маршрута, прямого отрезка, структуры обочины дороги, точки разветвления, пункта взимания платы, позиции уменьшения количества полосы движения и зоны обслуживания (SA) / зоны парковки (PA), записываются в соответствии с координатами карты (информацией о местоположении). Точкой слияния является место, где сливаются полоса движения, которая осуществляет слияние (merging lane), и полоса движения, с которой осуществляется слияние (merged lane), примыкающая к полосе движения, которая осуществляет слияние. Например, на автомагистрали основная проезжая часть соответствует полосе движения, с которой осуществляется слияние. Картографическая информация включает в себя информацию о дорожной структуре, включающую в себя точку слияния, в том числе информацию о длине полосы движения, которая осуществляет слияние, кривизне полосы движения, которая осуществляет слияние, кривизне полосы движения, с которой осуществляется слияние, и количестве полос движения на полосе движения, с которой осуществляется слияние. Картографическая информация содержит информацию об объектах, расположенных на граничной части между полосой движения, которая осуществляет слияние, и полосой движения, с которой осуществляется слияние. Упомянутыми объектами, например, являются разграничивающая стенка, разделительная зона, шумопоглощающая стенка и т.д. между полосой движения, которая осуществляет слияние, и полосой движения, с которой осуществляется слияние. Информация об объектах включает в себя информацию о позиции, высоте, длине и подобном объекта. Картографическая информация, хранящаяся в базе 130 картографических данных, может быть картографической информацией высокого разрешения, пригодной для автоматической работы. Картографическую информацию высокого разрешения получают посредством связи с внешней средой. Картографическая информация высокого разрешения может быть сгенерирована на основе информации, получаемой в режиме реального времени с использованием группы 110 датчиков. Картографическая информация, хранящаяся в базе картографических данных, доступна устройству 190 управления.
[0014] Бортовое устройство 140 представляет собой различные устройства, оснащенные в транспортном средстве и приводимые в действие посредством управления водителем. К таким бортовым устройствам относятся рулевое управление, педали акселератора, педали тормоза, навигационные устройства, аудиоустройства, кондиционеры, переключатели громкой связи, электрические стеклоподъемники, дворники, фары, указатели поворота, звуковые сигналы и т.п. Когда бортовое устройство 140 приводится в действие водителем, информация выводится на устройство 190 управления.
[0015] Устройство 150 уведомления может быть, например, дисплеем, обеспечиваемым навигационным устройством, дисплеем, установленным во внутреннем зеркале заднего вида, дисплеем, установленным в секции приборной панели, проекционным дисплеем, проецируемым на лобовое стекло, или динамиком, обеспечиваемым аудиоустройством.
[0016] Устройство 160 ввода представляет собой, например, поворотный переключатель, посредством которого водитель может осуществлять ручной ввод, сенсорную панель, установленную на экране дисплея, или микрофон, посредством которого водитель может осуществлять голосовой ввод. В одном или нескольких вариантах осуществления настоящего изобретения водитель может включать/выключать автоматическое управление работой, приводя в действие устройство 160 ввода. При автоматическом управлении работой транспортного средства согласно одному или более вариантам осуществления настоящего изобретения, когда предшествующее транспортное средство находится впереди рассматриваемого транспортного средства, расстояние между данным транспортным средством и предшествующим транспортным средством поддерживается равным расстоянию до транспортного средства, установленному водителем, и выполняется управление расстоянием до транспортного средства для управления движением рассматриваемого транспортного средства таким образом, чтобы рассматриваемое транспортное средство следовало за предшествующим транспортным средством (управление следованием за предшествующим транспортным средством). Когда перед данным транспортным средством нет предшествующего транспортного средства, выполняется управление скоростью для управления движением рассматриваемого транспортного средства со скоростью транспортного средства, установленной водителем. В одном или нескольких вариантах осуществления настоящего изобретения водитель может управлять устройством 160 ввода, тем самым устанавливая заданную скорость транспортного средства (например, конкретное значение скорости) рассматриваемого транспортного средства в управлении скоростью и заданное расстояние между транспортными средствами (например, любую из трех стадий: небольшое расстояние, среднее расстояние и большое расстояние) в управлении расстоянием между транспортными средствами. Автоматическое управление работой включает в себя управление слиянием (управление сменой полосы движения).
[0017] Устройство 170 связи осуществляет связь с устройством связи за пределами транспортного средства. Устройство 170 связи получает информацию о дорожном трафике и тому подобное. Например, устройство 170 связи может получать различные типы информации с внешнего устройства, выполняя связь между транспортными средствами с другим транспортным средством, выполняя связь "дорога-транспортное средство" с устройством, установленным на обочине дороги, или выполняя беспроводную связь с информационным сервером, установленным за пределами транспортного средства. Информация, получаемая устройством связи, выводится в устройство 190 управления.
[0018] Устройство 180 управления вождением управляет движением рассматриваемого транспортного средства. Устройство 180 управления вождением включает в себя механизм управления тормозом, механизм управления ускорением, механизм управления двигателем и устройство с HMI (человеческим интерфейсом) и тому подобное. Устройство 180 управления вождением выполняет автоматическую работу рассматриваемого транспортного средства, управляя работой приводного механизма (в том числе работой двигателя внутреннего сгорания в случае транспортного средства с двигателем, работой электродвигателя в случае системы электрического транспортного средства, а также распределением крутящего момента между двигателем внутреннего сгорания и электродвигателем в случае гибридного транспортного средства), работой тормоза и работой исполнительного механизма рулевого управления и т.д., в соответствии c окружением при движении рассматриваемого транспортного средства. В рассматриваемом случае устройство 180 управления вождением управляет движением рассматриваемого транспортного средства по команде устройства 190 управления, описанного далее. Другие хорошо известные способы также могут использоваться устройством 180 управления вождением в качестве способа управления движением.
[0019] Устройство 190 управления включает в себя процессор и состоит из ROM (постоянной памяти), хранящей программы для управления движением рассматриваемого транспортного средства, CPU (центрального процессора), исполняющего программы, хранящиеся в ROM, и RAM (оперативную память), служащую в качестве доступного запоминающего устройства. В качестве операционных схем можно использовать MPU (микропроцессор), DSP (цифровой сигнальный процессор), ASIC (специализированную интегральную схему) и FPGA (программируемую вентильную матрицу) вместо или вместе с процессорами CPU (центральными процессорами).
[0020] Устройство 190 управления выполняет программу, хранящуюся в ROM с помощью CPU, и тем самым реализует функцию получения информации для получения информации о транспортном средстве, связанной с движением рассматриваемого транспортного средства, и внешней информации для рассматриваемого транспортного средства, функцию определения окружения при движении для определения окружения при движении рассматриваемого транспортного средства и функцию управления движением для управления движением рассматриваемого транспортного средства. Каждая функция устройства 190 управления будет описана ниже.
[0021] Устройство 190 управления получает информацию о транспортном средстве о движении рассматриваемого транспортного средства посредством функции получения информации. Информация о движении включает в себя информацию о скорости транспортного средства собственно рассматриваемого транспортного средства, определенной датчиком скорости транспортного средства, информацию изображения лица водителя, захваченную камерой, размещенной внутри транспортного средства, и т.п. Кроме того, устройство 190 управления получает в качестве информации о движении информацию о текущей позиции рассматриваемого транспортного средства от устройства 120 обнаружения позиции рассматриваемого транспортного средства. Кроме того, устройство 190 управления получает из базы 130 картографических данных информацию о позиции точки слияния, точки разветвления, пункта взимания платы, позиции уменьшения количества полос движения, а также зоны обслуживания (SA) / зоны парковки (PA) и т.п., и информацию о дорожной структуре.
[0022] Например, устройство 190 управления получает посредством функции получения информации информацию об изображении за пределами транспортного средства, захваченную передней камерой и задней камерой, а также внешнюю информацию об области вокруг рассматриваемого транспортного средства из результата обнаружения, полученного передним радаром, задним радаром и боковым радаром. Устройство 180 управления вождением использует группу 110 датчиков для получения информации о транспортном средстве для другого транспортного средства, двигающегося вблизи рассматриваемого транспортного средства. Информация о транспортном средстве для другого транспортного средства включает в себя по меньшей мере информацию о позиции другого транспортного средства.
[0023] Устройство 190 управления, посредством функции определения окружения при движении, обращается к таблице, хранящейся в ROM устройства 190 управления, и определяет окружение при движении, в котором рассматриваемое транспортное средство движется. Окружением при движении является окружение слияния, при котором транспортное средство вливается из полосы движения, которая осуществляет слияние, в полосу движения, с которой осуществляется слияние, окружение при движении, при котором транспортное средство движется по основной проезжей части, соединяемой с полосой движения, с которой осуществляется движение и т.д. Окружение при движении сохраняется в базе данных в качестве таблицы. Устройство 190 управления идентифицирует дорожную ситуацию вблизи текущей позиции, обращаясь к картографической информации, и определяет, соответствует ли идентифицированная дорожная ситуация окружению при движении, включенному в таблицу. Затем устройство 190 управления определяет, что текущее окружение при движении является окружением, подходящим для управления вливанием транспортного средства, когда указанная дорожная ситуация соответствует, например, окружению слияния.
[0024] Устройство 190 управления управляет движением рассматриваемого транспортного средства с помощью функции управления движением. Например, функция управления движением, на основе результата обнаружения группой 110 датчиков, обнаруживает дорожные отметки полосы движения, по которой движется рассматриваемое транспортное средство (в дальнейшем также называемой полосой движения для рассматриваемого транспортного средства), и выполняет управление удержанием полосы движения для управления позицией движения в направлении ширины рассматриваемого транспортного средства, так что рассматриваемое транспортное средство движется по полосе движения для рассматриваемого транспортного средства. В этом случае устройство 190 управления может побудить устройство 180 управления вождением управлять работой исполнительного механизма рулевого управления и подобного, чтобы рассматриваемое транспортное средство двигалось в надлежащей позиции движения. Кроме того, устройство 190 управления может выполнять управление движением для следования, чтобы автоматически следовать за предшествующим транспортным средством на некотором расстоянии между данным транспортным средством и предшествующим транспортным средством. В этом случае функция управления движением побуждает устройство 180 управления вождением управлять работой механизма вождения, такого как двигатель или тормоз, так что рассматриваемое транспортное средство и предшествующее транспортное средство двигаются на некотором расстоянии между транспортными средствами.
[0025] Кроме того, когда устройство 190 управления управляет устройством 180 управления вождением, чтобы удерживать движение рассматриваемого транспортного средства в полосе движения (в дальнейшем также называемой полосой движения для рассматриваемого транспортного средства), по которой движется рассматриваемое транспортное средство (в дальнейшем также называемое управлением удержания полосы движения), устройство 190 управления обнаруживает дорожную отметку полосы движения для рассматриваемого транспортного средства на основе результата обнаружения группой 110 датчиков и управляет позицией движения в направлении ширины рассматриваемого транспортного средства путем управления работой исполнительного механизма рулевого управления и т.п. Кроме того, когда устройство 180 управления вождением управляет движением рассматриваемого транспортного средства из полосы движения, которая осуществляет слияние, в которой рассматриваемое транспортное средство движется в смежную полосу движения (соответствующую полосе движения, с которой осуществляется слияние), примыкающую к полосе движения, которая осуществляет слияние, устройство 180 управления вождением управляет работой механизма вождения, работой тормоза и работой исполнительного механизма рулевого управления и т.д., чтобы управлять скоростью транспортного средства собственно рассматриваемого транспортного средства и углом поворота рассматриваемого транспортного средства на основе результата обнаружения с датчика 110. Таким образом, выполняется управление движением рассматриваемого транспортного средства, когда рассматриваемое транспортное средство вливается с полосы движения, которая осуществляет слияние, в смежную полосу движения (в дальнейшем также упоминаемое как управление вливанием транспортного средства). При управлении вливанием транспортного средства устройство 190 управления использует датчики или подобное для обнаружения предопределенной области возможного слияния на основной проезжей части, в том числе целевой точки для автоматической работы, и управляет скоростью транспортного средства собственно рассматриваемого транспортного средства и углом поворота рассматриваемого транспортного средства так, чтобы рассматриваемое транспортное средство двигалось по направлению к целевой точке. Автоматическое управление работой вождением посредством функции управления движением выполняется в соответствии с законодательством и правилами дорожного движения в каждой стране. Подробности способа управления посредством функции управления вливанием транспортного средства будут описаны далее.
[0026] Далее, со ссылкой на ФИГ. 2, 3 и 4 будет описан процесс управления движением во время слияния согласно одному или более вариантам осуществления настоящего изобретения. ФИГ. 2 представляет собой блок-схему, показывающую последовательность операций управления устройства 190 управления. ФИГ. 3 и 4 представляют собой схемы для объяснения управления, когда рассматриваемое транспортное средство вливается из полосы движения, которая осуществляет слияние, в смежную полосу движения. ФИГ. 3 и 4 представляют собой схемы для объяснения дорожной структуры, в том числе точки слияния. ФИГ. 3 показывает дорожную структуру, когда полоса движения, которая осуществляет слияние, является длинной, а ФИГ. 4 показывает дорожную структуру, когда полоса движения, которая осуществляет слияние, является короткой. Описанный ниже процесс управления движением выполняется устройством 190 управления. Кроме того, описанный ниже процесс управления движением начинается при включении переключателя зажигания или переключателя питания и выполняется многократно в предопределенном цикле (например, каждые 10 миллисекунд) до тех пор, пока переключатель зажигания или переключатель питания не будет выключен.
[0027] Нижеследующее описание основано на примерном окружении, в котором управление автоматической работой вводится (включается) водителем. Водитель включает управление автоматической работой через устройство 160 ввода. В то время как рассматриваемое транспортное средство удерживает полосу движения на маршруте движения, при автоматическом управлении для следования, чтобы следовать за предшествующим транспортным средством, или в отсутствие предшествующего транспортного средства, выполняется управление для движения с предопределенной скоростью транспортного средства. Маршрутом движения является маршрут до пункта назначения, который вычисляется, например, навигационной системой.
[0028] На этапе S1 устройство 190 управления получает информацию о транспортном средстве рассматриваемого транспортного средства от устройства 120 обнаружения позиции рассматриваемого транспортного средства и бортового устройства 140. Кроме того, устройство 190 управления получает информацию о транспортном средстве другого транспортного средства с использованием группы 110 датчиков или подобного. Информация о транспортном средстве включает в себя информацию, указывающую текущее состояние транспортного средства, такую как скорость транспортного средства у рассматриваемого транспортного средства и/или другого транспортного средства, а также информацию о текущей позиции рассматриваемого транспортного средства и/или другого транспортного средства и т.п.
[0029] На этапе S2 устройство 190 управления получает картографическую информацию из базы 130 картографических данных и обнаруживает дорожную структуру вблизи позиции рассматриваемого транспортного средства. На этапе S3 устройство 190 управления идентифицирует участок слияния на основе дорожной структуры. Участком слияния является участок, где соединяются полоса движения, которая осуществляет слияние, и полоса движения, с которой осуществляется слияние. В рассматриваемом случае, если рассматриваемое транспортное средство движется не вблизи с участком слияния (например, при движении по прямой дороге, где полоса движения, которая осуществляет слияние, не соединяется), устройство 190 управления завершает последовательность операций управления, показанную на ФИГ. 2.
[0030] На этапе S4 устройство 190 управления на основе дорожной структуры идентифицирует область возможного слияния и устанавливает позицию вливания в области возможного слияния. Область возможного слияния и позиция вливания будут описаны со ссылкой на ФИГ. 3 и 4. В рассматриваемом случае, на ФИГ. 3 и 4 транспортное средство A представляет собой рассматриваемое транспортное средство, а транспортное средство B представляет собой другое транспортное средство. Область P возможного слияния представляет собой область, где транспортное средство может перемещаться из полосы движения, которая осуществляет слияние, в полосу движения, с которой осуществляется слияние, при автоматическом управлении движением, и устанавливается в такой же или более узкий диапазон, чем разрешенная область, где смена полосы движения разрешена правилами дорожного движения. Область P возможного слияния устанавливается на полосе движения и представляет собой диапазон от позиции другого транспортного средства на полосе движения до позиции вливания. Позиция вливания представляет собой позицию, установленную на полосе движения, с которой осуществляется слияние, и является целевой позицией, когда выполняется смена полосы движения. Как показано на ФИГ. 3 и 4, стенка 101, такая как шумозащитный барьер, установлена на граничном участке между полосой движения, которая осуществляет слияние, и полосой движения, с которой осуществляется слияние, для разделения между полосой движения, которая осуществляет слияние, и полосой движения, с которой осуществляется слияние. Затем в направлении движения транспортного средства полоса запрета движения, размеченная рисунком "зебра", предусмотрена в конце стенки 101. В рассматриваемом случае конец b полосы движения, которая осуществляет слияние, представляет собой мертвую точку. Когда транспортное средство меняет полосу движения с полосы движения, которая осуществляет слияние, на полосу движения, с которой осуществляется слияние, необходимо выполнить смену полосы движения до достижения конца b.
[0031] Длина в направлении движения транспортного средства в области возможного слияния соответствует длине полосы движения, которая осуществляет слияние. Обратите внимание, что длина полосы движения, которая осуществляет слияние, не обязательно соответствует длине области возможного слияния. Например, если стенка установлена на левой границе полосы движения, которая осуществляет слияние, полоса движения, которая осуществляет слияние, будет длиннее, чем длина области возможного слияния. Таким образом, расстояние от точки, в которой рассматриваемое транспортное средство должно начать ускоряться при подготовке к вливанию, до конца полосы движения, которая осуществляет слияние, может быть длиной полосы движения, которая осуществляет слияние.
[0032] Когда длина полосы движения, которая осуществляет слияние, является большой как показано на ФИГ. 3, рассматриваемое транспортное средство может выполнять достаточное ускорение. Следовательно, разница между скоростью транспортного средства рассматриваемого транспортного средства во время начала управления вливанием и скоростью транспортного средства собственно транспортного средства, движущегося по полосе движения, с которой осуществляется слияние, является малой. В таком случае позиция вливания устанавливается впереди движущегося транспортного средства, движущегося по полосе движения, с которой осуществляется слияние, поскольку рассматриваемое транспортное средство выполняет смену полосы движения, выезжая перед другим транспортным средством, когда рассматриваемое транспортное средство выполняет смену полосы движения с полосы движения, которая осуществляет слияние, на полосу движения, с которой осуществляется слияние.
[0033] С другой стороны, когда длина полосы движения, которая осуществляет слияние, является короткой как показано на ФИГ. 4, рассматриваемое транспортное средство не может выполнять достаточное ускорение. Следовательно, разница между скоростью транспортного средства рассматриваемого транспортного средства во время начала управления вливанием и скоростью транспортного средства собственно транспортного средства, движущегося по полосе движения, с которой осуществляется слияние, является большой. В таком случае позиция вливания устанавливается позади движущегося транспортного средства, движущегося по полосе движения, с которой осуществляется слияние, поскольку рассматриваемое транспортное средство выполняет смену полосы движения позади другого транспортного средства, когда рассматриваемое транспортное средство выполняет смену полосы движения с полосы движения, которая осуществляет слияние, на полосу движения, с которой осуществляется слияние.
[0034] Другими словами, на позицию вливания относительно другого транспортного средства влияет дорожная структура, включающая в себя точку слияния. Порог определения для определения того, находится ли позиция вливания впереди другого транспортного средства или позади другого транспортного средства, устанавливается в устройстве 190 управления заранее. Устройство 190 управления сравнивает длину полосы движения, которая осуществляет слияние, включенную в дорожную структуру, с порогом определения. Если длина полосы движения, которая осуществляет слияние, равна или превышает порог определения, устройство 190 управления устанавливает позицию вливания перед другим транспортным средством. С другой стороны, если длина полосы движения, которая осуществляет слияние, меньше порога определения, устройство 190 управления устанавливает позицию вливания позади другого транспортного средства.
[0035] В примерах на ФИГ. 3 и 4 рассматриваемое транспортное средство A и другое транспортное средство B, движущееся рядом с данным транспортным средством, движутся с одинаковой скоростью транспортного средства друг относительно друга, и относительная позиция направления движения транспортного средства является той же самой. В таком случае в примере на ФИГ. 3, устройство 190 управления устанавливает позицию вливания относительно другого транспортного средства B впереди этого другого транспортного средства B. В примере на ФИГ. 4, устройство 190 управления устанавливает позицию вливания относительно другого транспортного средства B позади этого другого транспортного средства B.
[0036] Устройство 190 управления может определять количество полос движения, включенных в полосу движения, с которой осуществляется слияние, и устанавливать позицию вливания в соответствии с количеством полос движения. В случае, когда количество полос движения велико, существует место для смены другим транспортным средством, движущимся по полосе движения, с которой осуществляется слияние, полосы движения, когда рассматриваемое транспортное средство меняет полосу движения с полосы движения, которая осуществляет слияние, на полосу движения, с которой осуществляется слияние. Следовательно, высока вероятность того, что другое транспортное средство может уступить пространство рассматриваемому транспортному средству. С другой стороны, в случае, когда количество полос движения, включенных в полосу движения, с которой осуществляется слияние, невелико, поскольку существует высокая вероятность того, что другое транспортное средство может предоставить пространство для рассматриваемого транспортного средства, устройство 190 управления отдает приоритет другому транспортному средству, движущемуся впереди по полосе движения, с которой осуществляется слияние, и управляет сменой данным транспортным средством полосы движения позади этого другого транспортного средства. Устройство 190 управления сравнивает количество обнаруженных полос движения с предопределенным пороговым значением количества полос движения. Затем, если количество обнаруженных полос движения равно или превышает пороговое значение количества полос движения, устройство 190 управления устанавливает позицию вливания относительно другого транспортного средства впереди упомянутого другого транспортного средства. С другой стороны, если количество обнаруженных полос движения меньше порогового значения количества полос движения, устройство 190 управления устанавливает позицию вливания относительно другого транспортного средства позади упомянутого другого транспортного средства.
[0037] Кроме того, когда другое транспортное средство не присутствует вблизи рассматриваемого транспортного средства, устройство 190 управления устанавливает позицию вливания в позицию, подходящую для смены полосы движения посредством автоматического управления работой.
[0038] На этапе S5 устройство 190 управления устанавливает критерий определения слияния на основе дорожной структуры. Критерий определения слияния является критерием для определения того, возможна ли смена полосы движения. Как будет описано далее, в настоящем варианте осуществления, параметр определения слияния вычисляется как индекс для определения того, возможно ли слияние. Критерий определения слияния представлен пороговым значением, соответствующим параметру определения слияния. Порог определения слияния устанавливается на основе дорожной структуры. Порог определения слияния устанавливается на основе позиции транспортного средства в полосе движения, которая осуществляет слияние. Чем ниже порог определения слияния, тем выше вероятность того, что будет выполнено определение, что слияние является возможным. Например, в непосредственной близости от въезда в область возможного слияния порог определения слияния устанавливается равным высокому значению, поскольку ожидается, что скорость транспортного средства у рассматриваемого транспортного средства не является достаточно высокой. Далее будет описан способ установки критерия определения слияния.
[0039] Устройство 190 управления устанавливает область возможного слияния на основе дорожной структуры и определяет длину установленной области возможного слияния как длину полосы движения, которая осуществляет слияние. Устройство 190 управления увеличивает порог определения слияния на въезде в область возможного слияния по мере увеличения длины полосы движения, которая осуществляет слияние. Затем устройство 190 управления устанавливает порог определения слияния так, чтобы порог определения слияния постепенно уменьшался к концу b полосы движения, которая осуществляет слияние, от въезда в область возможного слияния. Когда рассматриваемое транспортное средство движется в полосе движения, которая осуществляет слияние, чем ближе рассматриваемое транспортное средство находится к концу b, тем меньше места требуется для завершения смены полосы движения. Таким образом, в настоящем варианте осуществления порог определения слияния снижается, чтобы увеличить возможность смены полосы движения так, что чем ближе позиция рассматриваемого транспортного средства к концу b, тем легче определить, что смена полосы движения является возможной. Кроме того, в случае, когда рассматриваемое транспортное средство движется по полосе движения, которая осуществляет слияние, а другое транспортное средство движется по полосе движения, с которой осуществляется слияние, позади рассматриваемого транспортного средства, существует высокая вероятность того, что водитель другого транспортного средства уступит дорогу рассматриваемому транспортному средству для въезд рассматриваемого транспортного средства, когда водитель другого транспортного средства видит, что рассматриваемое транспортное средство приближается к концу b. Следовательно, в настоящем варианте осуществления, устройство 190 управления устанавливает порог определения слияния так, чтобы порог определения слияния постепенно уменьшался по мере движения в направлении конца b полосы движения, которая осуществляет слияние. Это позволяет избежать остановку транспортного средства вблизи конца b. Кроме того, на въезде в область возможного слияния, поскольку порог определения слияния установлен высоким, существует низкая вероятность того, что будет определено, что слияние возможно. Это позволяет избежать смены полосы движения в непосредственной близости от въезда в область возможного слияния, и обеспечивает управление транспортным средством для смены полосы движения с достаточным ускорением.
[0040] Кроме того, устройство 190 управления уменьшает порог определения слияния вблизи въезда в область возможного слияния по мере уменьшения длины полосы движения, которая осуществляет слияние, определяемой посредством дорожной структуры. В области слияния, где длина полосы движения, которая осуществляет слияние, является небольшой, лучше увеличить вероятность того, что определяется, что слияние является возможным во всей области возможного слияния, поскольку диапазон, в котором слияние возможно, является узким. Таким образом, в настоящем варианте осуществления, когда длина полосы движения, которая осуществляет слияние, определяемая по дорожной структуре, является малой, устройство 190 управления устанавливает более низкий порог определения слияния, чтобы увеличить вероятность смены полос движения так, чтобы легче определялось, что смена полосы движения является возможной.
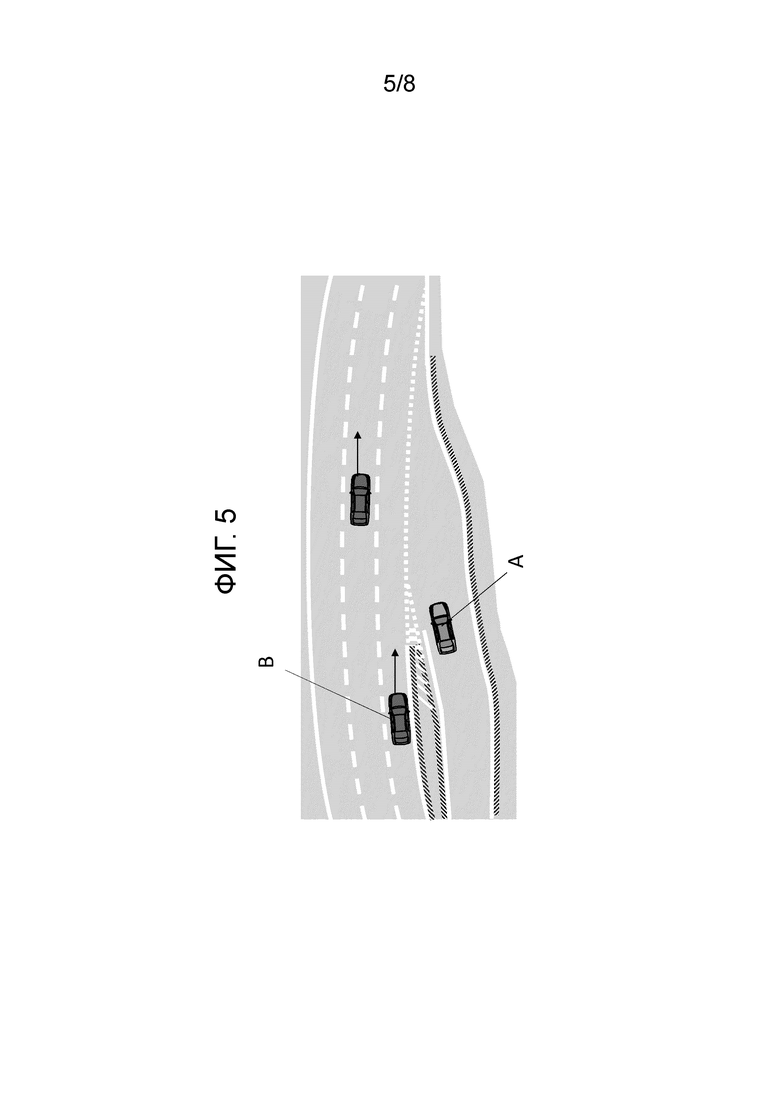
[0041] Устройство 190 управления может определять кривизну полосы движения, которая осуществляет слияние, и устанавливать порог определения слияния на основе этой кривизны. Как показано на ФИГ. 5 полоса движения, которая осуществляет слияние, и полоса движения, с которой осуществляется слияние, являются изогнутыми. Устройство 190 управления обнаруживает кривизну на основе формы дороги, включенной в картографическую информацию. Например, если рассматриваемое транспортное средство движется по полосе движения, которая осуществляет слияние, с большой кривизной, рассматриваемое транспортное средство не может выполнить достаточное ускорение в рассматриваемой полосе движения, которая осуществляет слияние. Следовательно, порог определения слияния на въезде в область возможного слияния повышается так, чтобы рассматриваемое транспортное средство могло выполнять смену полосы движения на максимально возможной скорости транспортного средства. Таким образом, на въезде в область возможного слияния вероятность определения того, что слияние является возможным, уменьшается. Это может побудить к смене полосы движения в конце полосы движения, которая осуществляет слияние. С другой стороны, устройство 190 управления снижает порог определения слияния в области въезда в область возможного слияния, когда рассматриваемое транспортное средство движется по полосе движения, которая осуществляет слияние, с малой кривизной, поскольку рассматриваемое транспортное средство в этой полосе движения, которая осуществляет слияние, может выполнить достаточное ускорение. Таким образом, устройство 190 управления устанавливает порог определения слияния на основе кривизны, так что порог определения слияния в области въезда в область возможного слияния тем выше, чем выше кривизна полосы движения, которая осуществляет слияние.
[0042] После последовательности операций управления на этапе S5, на этапе S6, устройство 190 управления на основе состояния рассматриваемого транспортного средства и другого транспортного средства устанавливает начальную позицию вливания. Начальная позиция вливания является точкой, в которой начинается управление слиянием, и она устанавливается на полосе движения, которая осуществляет слияние. Устройство 190 управления вычисляет относительную скорость транспортного средства у рассматриваемого транспортного средства, подходящую для смены полос движения, на основе текущей позиции рассматриваемого транспортного средства, текущей скорости транспортного средства у рассматриваемого транспортного средства, текущей позиции другого транспортного средства и скорости транспортного средства у этого другого транспортного средства. Устройство 190 управления вычисляет требуемое расстояние как вычисленную относительную скорость транспортного средства. Затем устройство 190 управления устанавливает начальную позицию вливания в позиции, отделенной необходимым расстоянием от текущей позиции рассматриваемого транспортного средства.
[0043] На этапе S7 устройство 190 управления обнаруживает текущую позицию рассматриваемого транспортного средства (позицию рассматриваемого транспортного средства) и определяет, достигла ли позиция рассматриваемого транспортного средства начальной позиции вливания. Когда позиция рассматриваемого транспортного средства не достигает начальной позиции вливания, устройство 190 управления выполняет последовательность операций управления на этапе S6. Когда позиция рассматриваемого транспортного средства достигает начальной позиции вливания, устройство 190 управления выполняет последовательность операций управления на этапе S8.
[0044] На этапе S8 устройство 190 управления вычисляет параметры определения слияния на основе текущей позиции рассматриваемого транспортного средства, текущей скорости рассматриваемого транспортного средства, текущей позиции другого транспортного средства и скорости транспортного средства у этого другого транспортного средства. Параметр определения слияния является индексом для определения, возможно ли слияние, и определяется относительной позицией рассматриваемого транспортного средства относительно другого транспортного средства (расстояние) и относительной скоростью рассматриваемого транспортного средства относительно другого транспортного средства. Чем больше параметр определения слияния, тем выше вероятность того, что определяется, что слияние является возможным. Например, параметр определения слияния может указываться относительной близостью рассматриваемого транспортного средства к другому транспортному средству. Например, когда скорость транспортного средства у рассматриваемого транспортного средства и скорость транспортного средства у другого транспортного средства являются близкими значениями, чем ниже степень близости, тем расстояние между данным транспортным средством и другим транспортным средством больше. Кроме того, даже когда расстояние между данным транспортным средством и другим транспортным средством является малым, в случае, когда другое транспортное средство движется впереди рассматриваемого транспортного средства в направлении движения транспортного средства, скорость транспортного средства у другого транспортного средства выше, чем скорость транспортного средства у рассматриваемого транспортного средства, близость устанавливают равной меньшему значению. Близостью, например, может быть время сближения, вычисленное путем деления расстояния между другим транспортным средством и данным транспортным средством на относительную скорость рассматриваемого транспортного средства относительно другого транспортного средства. Следует отметить, что другие способы, известные на момент применения настоящей заявки, могут быть использованы в качестве способа вычисления близости. Чем больше близость, тем меньше параметр определения слияния.
[0045] На этапе S9 устройство 190 управления определяет, существует ли другое транспортное средство, влияющее на рассматриваемое транспортное средство, на полосе движения, с которой осуществляется слияние, когда рассматриваемое транспортное средство выполняет смену полосы движения. Когда другого транспортного средства нет, устройство 190 управления выполняет процесс управления на этапе S13. Когда другое транспортное средство есть, устройство 190 управления выполняет процесс управления на этапе S10.
[0046] На этапе S10 устройство 190 управления сравнивает параметр определения слияния с порогом определения слияния и определяет, на основе результата сравнения, возможно ли слияние. Когда параметр определения слияния равен или превышает порог определения слияния, устройство 190 управления определяет, что слияние возможно, и выполняет процесс управления на этапе S13. С другой стороны, когда параметр определения слияния меньше порога определения слияния, устройство 190 управления определяет, что слияние не является возможным, и выполняет процесс управления на этапе S11.
[0047] На этапе S11 устройство 190 управления определяет конечное расстояние от текущей позиции рассматриваемого транспортного средства до конца b полосы движения, которая осуществляет слияние, и устанавливает позицию вливания на основе конечного расстояния. В общем, скорость транспортного средства у транспортного средства, движущегося по полосе движения, которая осуществляет слияние, ниже, чем скорость транспортного средства у транспортного средства, движущегося по полосе движения, с которой осуществляется слияние. Если расстояние от текущей позиции рассматриваемого транспортного средства до конца b полосы движения, которая осуществляет слияние, является малой, необходимо поднять скорость транспортного средства у рассматриваемого транспортного средства больше, чем у другого транспортного средства на полосе движения, с которой осуществляется слияние, чтобы ускориться и попытаться въехать перед другим транспортным средством. Кроме того, необходимо увеличить относительное расстояние до другого транспортного средства, используя более высокую скорость транспортного средства, чем скорость транспортного средства у других транспортных средств. Таким образом, в ситуации, когда расстояние до конца b является малым, рассматриваемому транспортному средству сложно обеспечить расстояние между транспортными средствами при увеличении скорости транспортного средства и выехать перед другим транспортным средством. В таком случае легче управлять данным транспортным средством, чтобы оно двигалось с низкой скоростью транспортного средства и выезжало позади другого транспортного средства. Следовательно, устройство 190 управления изменяет позицию вливания с позиции впереди другого транспортного средства на позицию позади другого транспортного средства, когда конечное расстояние от текущей позиции рассматриваемого транспортного средства до конца b полосы движения, которая осуществляет слияние, становится меньше, чем предопределенный порог конечного расстояния. Кроме того, если позиция вливания уже установлена в позицию позади другого транспортного средства, устройство 190 управления позицию вливания не меняет. С другой стороны, когда расстояние от текущей позиции рассматриваемого транспортного средства до конца b полосы движения, которая осуществляет слияние, является большим, устройство 190 управления позицию вливания не меняет, поскольку рассматриваемое транспортное средство может быть достаточно ускорено и расстояние между данным транспортным средством и другим транспортным средством может быть обеспечено.
[0048] На этапе S12 устройство 190 управления обновляет критерий определения слияния на основе текущей позиции рассматриваемого транспортного средства. Другими словами, устройство 190 управления многократно выполняет цикл управления с этапа S8 по этап S12 и снижает критерий определения слияния, когда рассматриваемое транспортное средство приближается к концу b. Затем устройство 190 управления выполняет процесс управления на этапе S8.
[0049] На этапе S13 устройство 190 управления выполняет управление слиянием на основе величины управления скоростью и величины рулевого управления. При управлении слиянием исполнительный механизм рулевого управления управляется таким образом, что фактическая величина операции руления становится величиной рулевого управления, в то время как рассматриваемое транспортное средство поддерживает скорость, указанную величиной управления скоростью. Таким образом, рассматриваемое транспортное средство движется по направлению к целевой точке и начинает выезжать на полосу движения, с которой осуществляется слияние, с полосы движения, которая осуществляет слияние.
[0050] На этапе S14 устройство 190 управления определяет, достигла ли текущая позиция транспортного средства целевой точки. Пока рассматриваемое транспортное средство не прибыло в целевую точку, устройство 190 управления выполняет управление слиянием. Когда рассматриваемое транспортное средство прибыло в целевую точку, устройство 190 управления завершает процесс управления транспортным средством на этапе S14, чтобы завершить последовательность операций управления.
[0051] Как описано выше, способ помощи при движении согласно одному или более вариантам осуществления настоящего изобретения включает в себя обнаружение дорожной структуры, включающей в себя точку слияния, где сливаются полоса движения, которая осуществляет слияние, и полоса движения, с которой осуществляется слияние, обнаружение состояния другого транспортного средства, движущегося по направлению к точке слияния, установки на основе дорожной структуры позиции вливания относительно движущегося транспортного средства (другого транспортного средства), движущегося по полосе движения, с которой осуществляется слияние, и критерия определения для определения, возможно ли слияние в этой позиции вливания, и определение, возможно ли слияние в позиции вливания, на основе состояния рассматриваемого транспортного средства, состояния упомянутого другого транспортного средства и критерия определения. В результате может быть выполнено надлежащее управление слиянием в позиции вливания.
[0052] Кроме того, способ помощи при движении согласно одному или более вариантам осуществления настоящего изобретения включает в себя определение длины полосы движения, которая осуществляет слияние, в качестве дорожной структуры в точке слияния, и установку позиции вливания на основе длины полосы движения, которая осуществляет слияние. Например, если относительная позиция рассматриваемого транспортного средства и другого транспортного средства в направлении движения является одинаковым, длина полосы движения, которая осуществляет слияние, влияет на позицию вливания относительно другого транспортного средства. Чем полоса движения, которая осуществляет слияние, длиннее, тем легче рассматриваемому транспортному средству ускоряться и въезжать впереди другого транспортного средства. Если полоса движения, которая осуществляет слияние, является короткой, рассматриваемое транспортное средство въезжает позади другого транспортного средства, поскольку ускорение является недостаточным. В настоящем варианте осуществления позиция для вливания относительно другого транспортного средства устанавливается посредством длины полосы движения, которая осуществляет слияние. Это может увеличить частоту, с которой рассматриваемое транспортное средство может въезжать впереди другого транспортного средства. Кроме того, это может препятствовать тому, чтобы движение рассматриваемого транспортного средства было затруднено другим транспортным средством. В результате может подавляться чрезмерное увеличение времени в пути, поскольку количество попыток сменить полосу движения уменьшается.
[0053] Кроме того, способ помощи при движении согласно одному или более вариантам осуществления настоящего изобретения включает в себя определение конечного расстояния от позиции транспортного средства, движущегося по полосе движения, которая осуществляет слияние, до конца полосы движения, которая осуществляет слияние, и установку позиции вливания на основе конечного расстояния. Это позволяет рассматриваемому транспортному средству вливаться согласно позиции конца полосы движения, которая осуществляет слияние, и снижает вероятность остановки в конце полосы движения, которая осуществляет слияние. Другими словами, поскольку это позволяет снизить вероятность остановки в полосе движения, которая осуществляет слияние, это может ограничить увеличение времени в пути.
[0054] Способ помощи при движении согласно одному или более вариантам осуществления настоящего изобретения включает в себя определение количества полос движения, включенных в полосу движения, с которой осуществляется слияние, и установку позиции вливания на основе количества полос движения. В результате может быть выполнено надлежащее управление слиянием в позиции вливания. Кроме того, можно ограничить увеличение времени в пути.
[0055] Кроме того, способ помощи при движении согласно одному или более вариантам осуществления настоящего изобретения включает в себя определение кривизны полосы движения, которая осуществляет слияние, и установку критерия определения на основе этой кривизны. В результате может быть выполнено надлежащее управление слиянием в позиции вливания.
[0056] Кроме того, способ помощи при движении согласно одному или более вариантам осуществления настоящего изобретения включает в себя установку позиции вливания впереди другого транспортного средства, движущегося по полосе движения, с которой осуществляется слияние, когда рассматриваемое транспортное средство движется по полосе движения, которая осуществляет слияние, и длина полосы движения, которая осуществляет слияние, больше, чем предопределенная длина. Таким образом, это может увеличить частоту, с которой рассматриваемое транспортное средство может въезжать впереди другого транспортного средства. Кроме того, это может препятствовать тому, чтобы движение рассматриваемого транспортного средства было затруднено другим транспортным средством. В результате чрезмерное увеличение времени в пути может быть предотвращено, поскольку уменьшается количество попыток смены полосы движения.
[0057] Кроме того, способ помощи при движении согласно одному или более вариантам осуществления настоящего изобретения включает в себя установку позиции вливания позади другого транспортного средства, движущегося по полосе движения, с которой осуществляется слияние, когда рассматриваемое транспортное средство движется по полосе движения, которая осуществляет слияние, и длина полосы движения, которая осуществляет слияние, меньше, чем предопределенная длина. В результате может быть выполнено надлежащее управление слиянием в позиции вливания.
[0058] Как модификация, способ помощи при движении согласно одному или более вариантам осуществления настоящего изобретения может включать в себя установку более широкого диапазона области возможного слияния по мере увеличения полосы движения, которая осуществляет слияние, и установку позиции вливания в области возможного слияния. Позиция вливания устанавливается в пределах диапазона области возможного слияния, но за счет увеличения диапазона области возможного слияния в направлении движения транспортного средства, диапазон, в котором позиция вливания может быть установлена в надлежащую позицию относительно позиции другого транспортного средства, расширяется. В результате может выполняться надлежащее управление слиянием в позиции вливания. Кроме того, это может препятствовать тому, чтобы движение рассматриваемого транспортного средства было затруднено другим транспортным средством, а также исключить чрезмерное увеличение времени в пути.
[0059] Кроме того, в качестве модификации, способ помощи при движении согласно одному или более вариантам осуществления настоящего изобретения включает в себя определение конечного расстояния от позиции транспортного средства, движущегося по полосе движения, которая осуществляет слияние, до конца полосы движения, которая осуществляет слияние, установку диапазона от передней части движущегося транспортного средства до конца полосы движения, которая осуществляет слияние, в качестве области возможного слияния, установку диапазона области возможного слияния более широким по мере увеличения конечного расстояния и установку позиции вливания в пределах области возможного слияния. В результате может быть выполнено надлежащее управление слиянием в позиции вливания. Кроме того, это может препятствовать тому, чтобы движение рассматриваемого транспортного средства было затруднено другим транспортным средством, а также исключить чрезмерное увеличение времени в пути.
[0060] Кроме того, как модификация, способ помощи при движении согласно одному или более вариантам осуществления настоящего изобретения может включать в себя установку более широкого диапазона области возможного слияния по мере увеличения количества полос движения и установку позиции вливания в пределах области возможного слияния. В результате может быть выполнено надлежащее управление слиянием в позиции вливания. Кроме того, это может препятствовать тому, чтобы движение рассматриваемого транспортного средства было затруднено другим транспортным средством, а также исключить чрезмерное увеличение времени в пути.
[0061] Кроме того, в качестве модификации, способ помощи при движении согласно одному или более вариантам осуществления настоящего изобретения может включать в себя обнаружение объекта, имеющегося на граничном участке между полосой движения, которая осуществляет слияние, и полосой движения, с которой осуществляется слияние, и установку позиции вливания вблизи конца полосы движения, которая осуществляет слияние, на полосе движения, с которой осуществляется слияние, когда высота объекта превышает предопределенный порог высоты. Таким образом, поскольку смена полосы движения выполняется вблизи конца полосы движения, которая осуществляет слияние, больше места остается для обнаружения другого транспортного средства. В результате существует более высокая вероятность того, что рассматриваемое транспортное средство может осуществлять вливание согласно ситуации с другим транспортным средством.
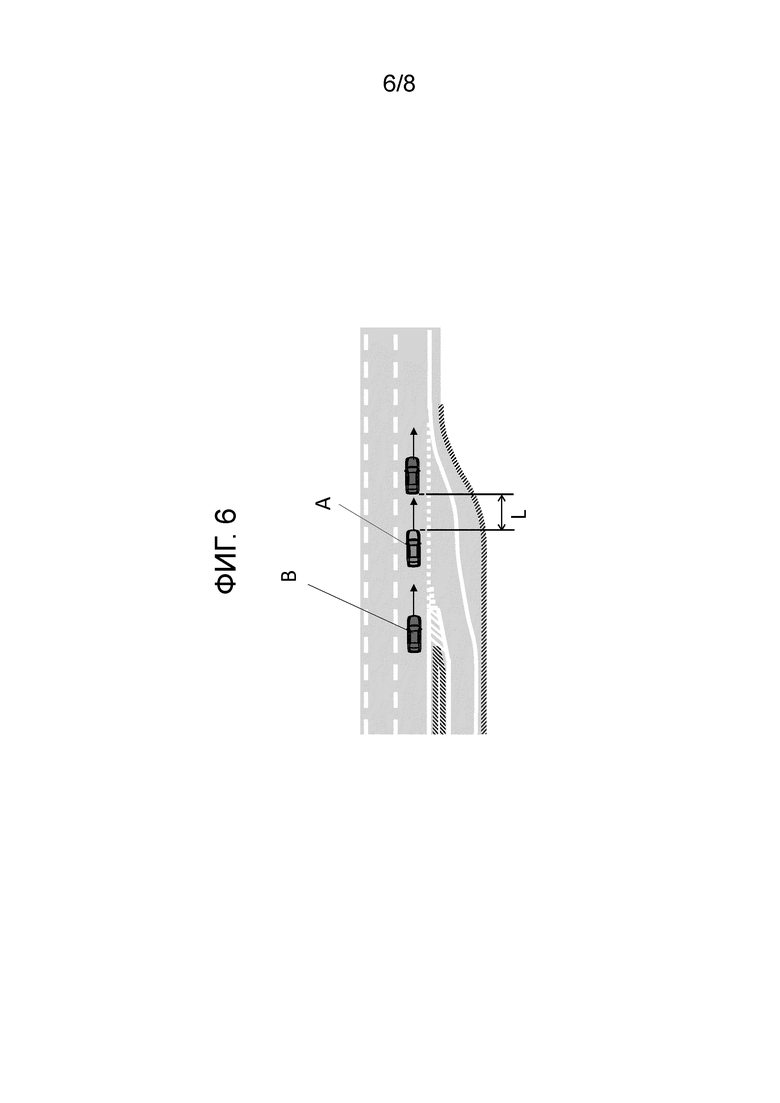
[0062] В качестве модификации способа помощи при движении согласно одному или более вариантам осуществления настоящего изобретения устройство 190 управления может корректировать нижний предел критерия определения слияния в зависимости от ситуации с транспортным средством, движущимся по полосе движения, с которой осуществляется слияние. ФИГ. 6 представляет собой схему для пояснения дорожной ситуации после того, как рассматриваемое транспортное средство A меняет полосу движения. Например, предполагается, что два других транспортных средства движутся по полосе движения, с которой осуществляется слияние, до того, как рассматриваемое транспортное средство осуществляет смену полосы движения, и что расстояние от текущей позиции рассматриваемого транспортного средства до конца полосы движения, которая осуществляет слияние, является малым. Затем предположим, что минимальное расстояние между автомобилями составляет 5,5 м, а время до столкновения (TTC) установлено на 1,5 секунды в качестве нижнего предельного значения для выполнения управления слиянием. Устройство 190 управления, исходя из состояния другого транспортного средства на полосе движения, с которой осуществляется слияние, и состояния рассматриваемого транспортного средства, , устанавливает одно с существенно более широким расстоянием между транспортными средствами из числа минимального расстояния между автомобилями и времени до столкновения в нижнее предельное значение критерия определения слияния. Например, если другое транспортное средство движется со скоростью 60 км/ч, расстояние между транспортными средствами будет равно 25 м, основываясь на времени до столкновения (TTC) 1,5 секунды. Затем устройство 190 управления устанавливает близость, соответствующую минимальному расстоянию между транспортными средствами в 25 м, в нижнее предельное значение критерия определения слияния. Таким образом, например, в примере с ФИГ. 6, когда расстояние L составляет 25 мм или меньше, устройство 190 управления может определять, что смена полосы движения не является возможной.
<<Второй вариант осуществления>>
[0063] Будет описано устройство 100 помощи при движении согласно другому варианту осуществления настоящего изобретения. В настоящем варианте осуществления, в отличие от первого варианта осуществления, управление выполняется, когда рассматриваемое транспортное средство движется по полосе движения, с которой осуществляется слияние. Другие конфигурации и такое же управление, как и в первом варианте осуществления, соответствующим образом включены в описание первого варианта осуществления.
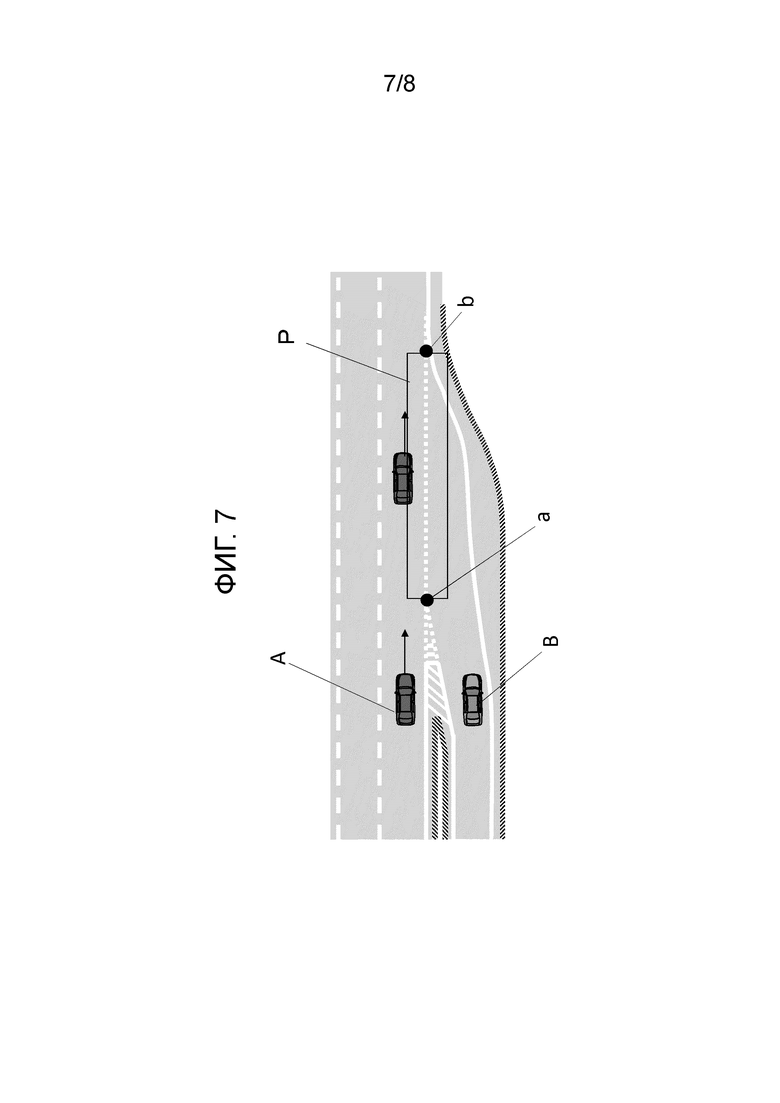
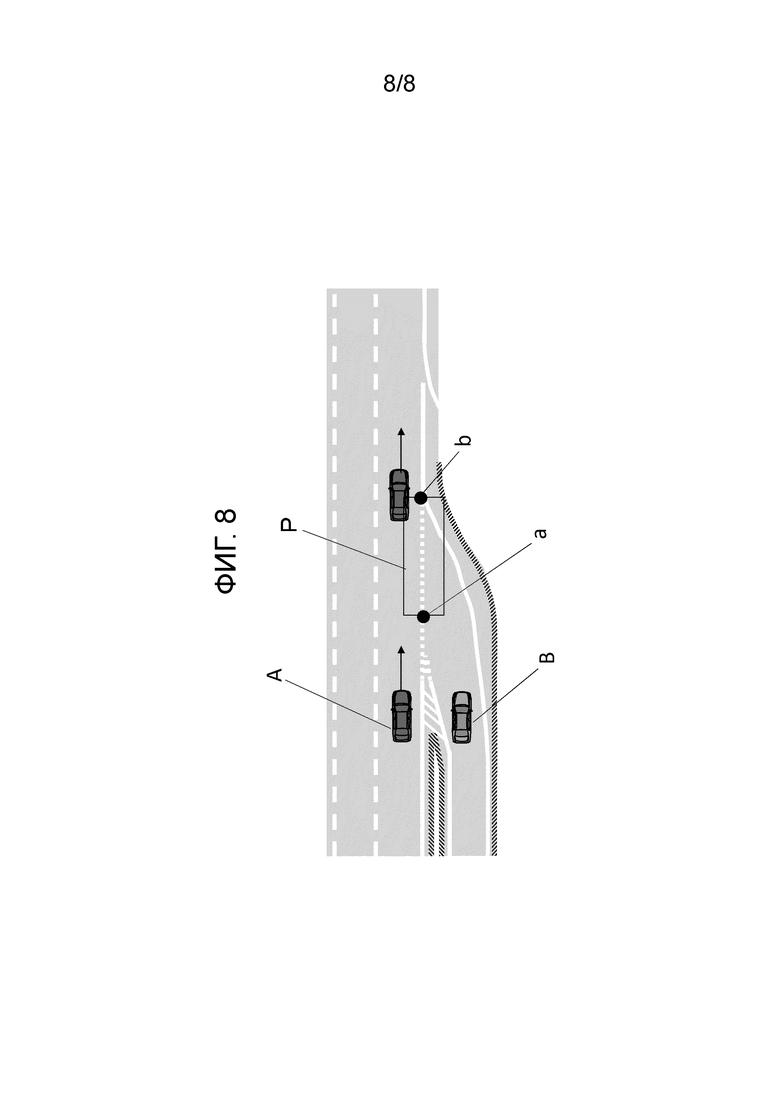
[0064] Будет описана обработка управления во время слияния согласно настоящему варианту осуществления. ФИГ. 7 и 8 представляют собой схемы для объяснения управления, когда другое транспортное средство вливается из полосы движения, которая осуществляет слияние, в смежную полосу движения. Дорожная конструкция на ФИГ. 7 является такой же, как таковая на ФИГ. 3, и дорожная конструкция на ФИГ. 8 является такой же, как таковая на ФИГ. 4.
[0065] Когда рассматриваемое транспортное средство движется по полосе движения, с которой осуществляется слияние, устройство 190 управления выполняет следующие управления, когда рассматриваемое транспортное средство приближается к полосе движения, которая осуществляет слияние.
[0066] Устройство 190 управления получает информацию о транспортном средстве рассматриваемого транспортного средства от устройства 120 обнаружения позиции рассматриваемого транспортного средства и бортового устройства 140. Кроме того, устройство 190 управления получает информацию о транспортном средстве другого транспортного средства с использованием группы 110 датчиков или подобного. Устройство 190 управления получает картографическую информацию из базы 130 картографических данных и обнаруживает дорожную структуру вблизи позиции рассматриваемого транспортного средства. Устройство 190 управления идентифицирует участок слияния на основе дорожной структуры.
[0067] Устройство 190 управления на основе дорожной структуры идентифицирует область возможного слияния и устанавливает позицию вливания в области возможного слияния. Как и в примере на ФИГ. 7, когда длина полосы движения, которая осуществляет слияние, является большой, разница между скоростью транспортного средства у рассматриваемого транспортного средства во время начала управления слиянием и скоростью транспортного средства у транспортного средства, движущегося по полосе движения, с которой осуществляется слияние, является небольшой, поскольку другое транспортное средство может выполнить достаточное ускорение. В таком случае, когда другое транспортное средство выполняет смену полосы движения с полосы движения, которая осуществляет слияние, на полосу движения, с которой осуществляется слияние, другое транспортное средство выполняет смену полосы движения впереди рассматриваемого транспортного средства. Следовательно, позиция вливания устанавливается впереди рассматриваемого транспортного средства, движущегося в полосе движения, с которой осуществляется слияние.
[0068] Как и в примере на ФИГ. 8, когда длина полосы движения, которая осуществляет слияние, является малой, разница между скоростью транспортного средства у другого транспортного средства во время начала управления слиянием и скоростью транспортного средства у рассматриваемого транспортного средства, движущегося в полосе движения, с которой осуществляется слияние, является большой, поскольку другое транспортное средство не может выполнить достаточное ускорение. В таком случае, когда другое транспортное средство выполняет смену полосы движения с полосы движения, которая осуществляется слияние, на полосу движения, с которой осуществляется слияние, позиция вливания устанавливается позади рассматриваемого транспортного средства, движущегося в полосе движения, с которой осуществляется слияние, поскольку другое транспортное средство выполняет смену полосы движения позади рассматриваемого транспортного средства.
[0069] Устройство 190 управления сравнивает длину полосы движения, которая осуществляет слияние, включенную в дорожную структуру, с порогом определения. Если длина полосы движения, которая осуществляет слияние, равна или превышает порог определения, устройство 190 управления устанавливает позицию вливания впереди рассматриваемого транспортного средства. С другой стороны, если длина полосы движения, которая осуществляет слияние, меньше порога определения, устройство 190 управления устанавливает позицию вливания позади рассматриваемого транспортного средства.
[0070] Устройство 190 управления устанавливает критерий определения слияния на основе дорожной структуры. Критерий определения слияния является критерием для определения того, меняет ли другое транспортное средство полосу движения. Устройство 190 управления вычисляет параметр определения слияния для другого транспортного средства при обнаружении другого транспортного средства, движущегося в полосе движения, которая осуществляется слияние, когда рассматриваемое транспортное средство движется в полосе движения, с которой осуществляется слияние. Способ вычисления параметра определения слияния является тем же самым, что и в первом варианте осуществления.
[0071] Устройство 190 управления устанавливает область возможного слияния на основе дорожной структуры и определяет длину установленной области возможного слияния как длину полосы движения, которая осуществляет слияние. Устройство 190 управления увеличивает порог определения слияния на въезде в область возможного слияния по мере увеличения длины полосы движения, которая осуществляет слияние. Затем устройство 190 управления устанавливает порог определения слияния так, чтобы порог определения слияния постепенно уменьшался по направлению к концу b полосы движения, которая осуществляет слияние, от области въезда области возможного слияния. Когда другое транспортное средство движется по полосе движения, которая осуществляет слияние, запас для завершения смены полосы движения уменьшается по мере приближения другого транспортного средства к концу b. Следовательно, в настоящем варианте осуществления порог определения слияния снижают, чтобы увеличить вероятность смены полосы движения, так что чем ближе позиция другого транспортного средства к концу b, тем легче определить, что другое транспортное средство меняет полосу движения.
[0072] Кроме того, устройство 190 управления уменьшает порог определения слияния вблизи въезда в область возможного слияния по мере уменьшения длины полосы движения, которая осуществляет слияние, определяемой посредством дорожной структуры. Лучше увеличить вероятность определения того, что другое транспортное средство выполняет смену полосы движения на всем протяжении области возможного слияния, поскольку диапазон, в котором возможно слияние, является узким в области слияния, в которой длина полосы движения, которая осуществляет слияние, является малой. Таким образом, в этом варианте осуществления, когда длина полосы движения, которая осуществляет слияние, определяемая по дорожной структуре, является малой, порог определения слияния понижается, чтобы увеличить вероятность смены полос движения так, чтобы легче определялось, что смена полосы движения является возможной.
[0073] Затем устройство 190 управления сравнивает параметр определения слияния с порогом определения слияния. Когда параметр определения слияния равен или превышает порог определения слияния, устройство 190 управления определяет, что другое транспортное средств выполняет смену полосы движения. Когда параметр определения слияния меньше порога определения слияния, устройство 190 управления определяет, что другое транспортное средств не выполняет смену полосы движения.
[0074] При определении того, что другое транспортное средство выполняет смену полосы движения, устройство 190 управления управляет скоростью транспортного средства согласно установленной позиции вливания. То есть, когда позиция вливания установлена впереди рассматриваемого транспортного средства, устройство 190 управления снижает скорость транспортного средства, чтобы гарантировать минимальное расстояние между транспортными средствами. С другой стороны, когда позиция вливания установлена позади рассматриваемого транспортного средства, устройство 190 управления увеличивает скорость транспортного средства, чтобы гарантировать минимальное расстояние между транспортными средствами.
[0075] Как описано выше, способ помощи при движении согласно одному или более вариантам осуществления настоящего изобретения включает в себя обнаружение дорожной структуры, включающей в себя точку слияния, где сливаются полоса движения, которая осуществляет слияние, и полоса движения, с которой осуществляется слияние, обнаружение состояния другого транспортного средства, движущегося по направлению к точке слияния, установку на основе дорожной структуры позиции вливания относительно движущегося транспортного средства (другого транспортного средства), движущегося по полосе движения, с которой осуществляется слияние, и критерия определения для определения, возможно ли слияние в этой позиции вливания, и определение на основе состояния рассматриваемого транспортного средства, состояния упомянутого другого транспортного средства и критерия определения, возможно ли слияние в позиции вливания. В результате может быть выполнено надлежащее управление слиянием в позиции вливания.
[0076] Кроме того, способ помощи при движении согласно одному или более вариантам осуществления настоящего изобретения включает в себя установку позиции вливания, в которой другое транспортное средство вливается из полосы движения, которая осуществляет слияние, в полосу движения, с которой осуществляется слияние, впереди рассматриваемого транспортного средства, когда рассматриваемое транспортное средство движется по полосе движения, с которой осуществляется слияние, и длина полосы движения, которая осуществляет слияние, меньше, чем предопределенная длина. В результате может быть выполнено надлежащее управление слиянием в позиции вливания.
[ПОЯСНЕНИЯ ПОЗИЦИОННЫХ ОБОЗНАЧЕНИЙ]
[0077] 100... Устройство помощи при движении
110... Группа датчиков
120... Устройство обнаружения позиции рассматриваемого транспортного средства
130... База картографических данных
140... Бортовое устройство
150... Устройство уведомления
160... Устройство ввода
170... Устройство связи
180... Устройство управления вождением
190... Устройство управления
Изобретение относится к способу управления транспортным средством и устройству управления транспортным средством. Способ помощи при движении для транспортного средства, исполняемый процессором, содержит этап обнаружения точки слияния, в которую полоса движения, которая осуществляет слияние, и полоса движения, с которой осуществляется слияние, сливаются, причем полоса движения, которая осуществляет слияние, является полосой движения, в которой движется рассматриваемое транспортное средство, а полоса движения, с которой осуществляется слияние, прилегает к полосе движения, которая осуществляет слияние. Однако когда обнаруживается другое транспортное средство, движущееся по полосе движения, с которой осуществляется слияние, по направлению к точке слияния, установку, позади этого другого транспортного средства, позиции вливания рассматриваемого транспортного средства в точке слияния, чтобы исполнить управление слиянием, когда длина полосы движения, которая осуществляет слияние, меньше предопределенной длины. Устройство помощи при движении для транспортного средства содержит процессор. Достигается повышение безопасности транспортного средства. 6 н.п. ф-лы, 8 ил.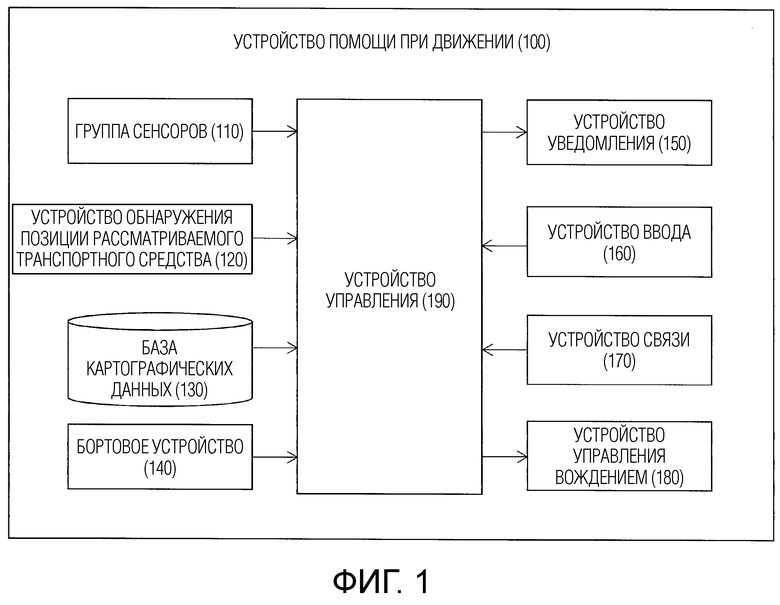
1. Способ помощи при движении для транспортного средства, исполняемый процессором, содержащий:
обнаружение точки слияния, в которую полоса движения, которая осуществляет слияние, и полоса движения, с которой осуществляется слияние, сливаются, причем полоса движения, которая осуществляет слияние, является полосой движения, в которой движется рассматриваемое транспортное средство, а полоса движения, с которой осуществляется слияние, прилегает к полосе движения, которая осуществляет слияние; и,
в случае когда обнаруживается другое транспортное средство, движущееся по полосе движения, с которой осуществляется слияние, по направлению к точке слияния, установку, позади этого другого транспортного средства, позиции вливания рассматриваемого транспортного средства в точке слияния, чтобы исполнить управление слиянием, когда длина полосы движения, которая осуществляет слияние, меньше предопределенной длины.
2. Способ помощи при движении для транспортного средства, исполняемый процессором, содержащий:
обнаружение точки слияния, в которую полоса движения, которая осуществляет слияние, и полоса движения, с которой осуществляется слияние, сливаются, причем полоса движения, которая осуществляет слияние, является полосой движения, в которой движется рассматриваемое транспортное средство, а полоса движения, с которой осуществляется слияние, прилегает к полосе движения, которая осуществляет слияние; и,
в случае когда обнаруживается другое транспортное средство, движущееся по полосе движения, с которой осуществляется слияние, по направлению к точке слияния, установку, позади этого другого транспортного средства, позиции вливания рассматриваемого транспортного средства в точке слияния, чтобы исполнить управление слиянием, когда конечное расстояние от позиции рассматриваемого транспортного средства до конца полосы движения, которая осуществляет слияние, меньше порогового значения.
3. Способ помощи при движении для транспортного средства, исполняемый процессором, содержащий:
обнаружение точки слияния, в которую полоса движения, которая осуществляет слияние, и полоса движения, с которой осуществляется слияние, сливаются, причем полоса движения, которая осуществляет слияние, является полосой движения, в которой движется рассматриваемое транспортное средство, а полоса движения, с которой осуществляется слияние, прилегает к полосе движения, которая осуществляет слияние; и,
в случае когда обнаруживается другое транспортное средство, движущееся по полосе движения, с которой осуществляется слияние, по направлению к точке слияния, установку, позади этого другого транспортного средства, позиции вливания рассматриваемого транспортного средства в точке слияния, чтобы исполнить управление слиянием, когда количество полос движения, включенных в полосу движения, с которой осуществляется слияние, меньше порогового значения.
4. Способ помощи при движении для транспортного средства, исполняемый процессором, содержащий:
обнаружение точки слияния, в которую полоса движения, которая осуществляет слияние, и полоса движения, с которой осуществляется слияние, сливаются, причем полоса движения, которая осуществляет слияние, является полосой движения, в которой движется рассматриваемое транспортное средство, а полоса движения, с которой осуществляется слияние, прилегает к полосе движения, которая осуществляет слияние; и,
в случае когда обнаруживается другое транспортное средство, движущееся по полосе движения, с которой осуществляется слияние, по направлению к точке слияния, установку критерия определения для определения того, возможно ли слияние, так что чем выше кривизна полосы движения, которая осуществляет слияние, тем более вероятно, что будет определено, что слияние возможно вблизи конца полосы движения, которая осуществляет слияние, чтобы выполнить управление слиянием.
5. Способ помощи при движении для транспортного средства, исполняемый процессором, содержащий:
обнаружение точки слияния, в которую полоса движения, которая осуществляет слияние, и полоса движения, с которой осуществляется слияние, сливаются, причем полоса движения, которая осуществляет слияние, является полосой движения, в которой движется рассматриваемое транспортное средство, а полоса движения, с которой осуществляется слияние, прилегает к полосе движения, которая осуществляет слияние; и,
в случае когда обнаруживается другое транспортное средство, движущееся по полосе движения, с которой осуществляется слияние, по направлению к точке слияния, установку, вблизи конца полосы движения, которая осуществляет слияние, позиции вливания рассматриваемого транспортного средства в точке слияния, чтобы выполнить управление слиянием, когда высота объекта, имеющегося на граничном участке между полосой движения, которая осуществляет слияние, и полосой движения, с которой осуществляется слияние, превышает предопределенное пороговое значение высоты.
6. Устройство помощи при движении для транспортного средства, содержащее процессор,
причем процессор выполнен с возможностью:
обнаружения точки слияния, в которую полоса движения, которая осуществляет слияние, и полоса движения, с которой осуществляется слияние, сливаются, причем полоса движения, которая осуществляет слияние, является полосой движения, в которой движется рассматриваемое транспортное средство, а полоса движения, с которой осуществляется слияние, прилегает к полосе движения, которая осуществляет слияние; и,
в случае когда обнаруживается другое транспортное средство, движущееся по полосе движения, с которой осуществляется слияние, по направлению к точке слияния, установки, позади этого другого транспортного средства, позиции вливания рассматриваемого транспортного средства в точке слияния, чтобы исполнить управление слиянием, когда длина полосы движения, которая осуществляет слияние, меньше предопределенной длины.
| JP 5434336 B2, 05.03.2014 | |||
| JP 2018076004 A, 17.05.2018 | |||
| US 2005015203 A1, 20.01.2005 | |||
| СИСТЕМА ИДЕНТИФИКАЦИИ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ИДЕНТИФИКАЦИИ ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2556774C1 |

