Изобретение относится к системам наведения ракет, а именно к оборонительно-наступательным системам, и может быть использовано для уничтожения гиперзвуковых маневрирующих целей ракетами с минимальной вероятностью причинения ущерба своим объектам обломками, образовавшимися при уничтожении целей.
Наиболее близким к предлагаемому является способ уничтожения гиперзвуковой маневрирующей цели ракетой (RU 2768062), где в оборонительно-наступательной системе (ОНС) обнаруживают и сопровождают цель и определяют текущие координаты и скорость цели, а также ее характеристики; в ОНС определяют текущие координаты точки прицеливания для ракеты; в ОНС определяют траекторию цели, относительно которой она маневрирует, и прогнозируют ее продолжение; в ОНС определяют текущие координаты места выхода ракеты на встречный курс на продолжении траектории цели, относительно которой она маневрирует; в ОНС назначают ракету и станцию управления (СУ) для вывода ракеты на встречный курс и уничтожения цели и передают данные ракеты на СУ; на СУ запускают ракету; на ракете определяют ее текущие координаты и скорость и передают их через СУ в ОНС; в ОНС рассчитывают траекторию и скорость движения ракеты к месту выхода на встречный курс и передают их на СУ; на СУ формируют команды наведения ракеты на место выхода на встречный курс по расчетной траектории с расчетной скоростью и передают их на ракету; в ОНС после выхода ракеты на встречный курс рассчитывают траекторию и скорость движения ракеты к цели и передают их на СУ; на СУ формируют команды наведения ракеты на цель по расчетной траектории с расчетной скоростью и передают их на ракету.
Однако, в таком способе высока вероятность причинения ущерба своим объектам обломками, образовавшимися при уничтожении цели, в связи с отсутствием в нем анализа возможных последствий уничтожения цели для окружения.
Цель изобретения - снижение вероятности причинения ущерба своим объектам обломками, образовавшимися при уничтожении цели.
Предложенный способ заключается в том, что:
- в ОНС обнаруживают и сопровождают цель и определяют текущие координаты и скорость цели, а также ее характеристики;
- на своих объектах определяют их текущие координаты и скорости и передают их в ОНС;
- в ОНС определяют траекторию цели, а также траектории своих объектов, и прогнозируют их продолжение;
- в ОНС определяют текущие координаты точки прицеливания для ракеты;
- в ОНС прогнозируют траектории и скорости движения обломков, которые образуются при столкновении ракеты с точкой прицеливания в каждом месте продолжения траектории цели;
- в ОНС определяют координаты мест уничтожения цели, в которых вероятность причинения ущерба своим объектам обломками минимальна, на продолжении траектории цели;
- в ОНС определяют текущие координаты места уничтожения цели на продолжении ее траектории и время появления цели там;
- в ОНС определяют траекторию цели, относительно которой она маневрирует, и прогнозируют ее продолжение;
- в ОНС определяют текущие координаты места и время выхода ракеты на встречный курс на продолжении траектории цели, относительно которой она маневрирует;
- в ОНС назначают ракету и СУ для вывода ракеты на встречный курс и уничтожения цели и передают данные ракеты на СУ;
- на СУ запускают ракету;
- на ракете определяют ее текущие координаты и скорость и передают их через СУ в ОНС;
- в ОНС рассчитывают траекторию и скорость движения ракеты к месту выхода на встречный курс и передают их на СУ;
- на СУ формируют команды наведения ракеты на место выхода на встречный курс по расчетной траектории с расчетной скоростью и передают их на ракету;
- в ОНС после выхода ракеты на встречный курс рассчитывают траекторию и скорость движения ракеты к цели и передают их на СУ;
- на СУ формируют команды наведения ракеты на цель по расчетной траектории с расчетной скоростью и передают их на ракету.
ОНС аналогична известной (RU 2753498). Цель может быть воздушной или космической, а объекты -наземными, надводными, воздушными или космическими. Координаты и скорость цели определяют в результате ее обзора с различных направлений, а характеристики цели - в результате ее сопровождения. Координаты и скорости своих объектов определяют в бортовых инерциальных системах навигации, корректируемых с помощью глобальной спутниковой системы навигации.
Точку прицеливания для ракеты выбирают в наиболее уязвимом месте цели в соответствии с ее характеристиками. Траектории и скорости обломков прогнозируют на основе результатов моделирования процесса разрушения целей ракетами (vestnikmai.ru/publications.php?ID=78871). Вероятность причинения ущерба своим объектам обломками определяют путем сопоставления прогнозируемых траекторий и скоростей обломков с продолжением траекторий и скоростями своих объектов. Место уничтожения цели выбирают среди мест с минимальной вероятностью причинения ущерба своим объектам обломками из условия обеспечения ракете времени, достаточного для выхода на встречный курс и уничтожения цели. Траекторию цели, относительно которой она маневрирует, определяют на основе анализа ее фактической траектории - для определения курса следования цели и вывода ракеты на встречный курс. Место и время выхода ракеты на встречный курс выбирают в соответствии с выбранным местом уничтожения цели и временем появления цели там.
Координаты и скорость ракеты определяют в бортовой инерциальной системе навигации, корректируемой с помощью глобальной спутниковой системы навигации. Траекторию и скорость движения ракеты к месту выхода на встречный курс рассчитывают из условия обхода ракетой сторонних объектов и зон действия противоракетной обороны противника. Траекторию и скорость движения ракеты к цели рассчитывают из условия обхода ракетой сторонних объектов и, по возможности, зон действия противоракетной обороны противника, а также из условия столкновения ракеты с точкой прицеливания под требуемым углом с требуемой скоростью.
Чем выше скорость ракеты, тем выше ее инерционность и ниже маневренность. Соотношение скорости и маневренности для ракеты на конечном участке траектории оптимизируют путем задания скорости, необходимой и достаточной для уничтожения цели при столкновении.
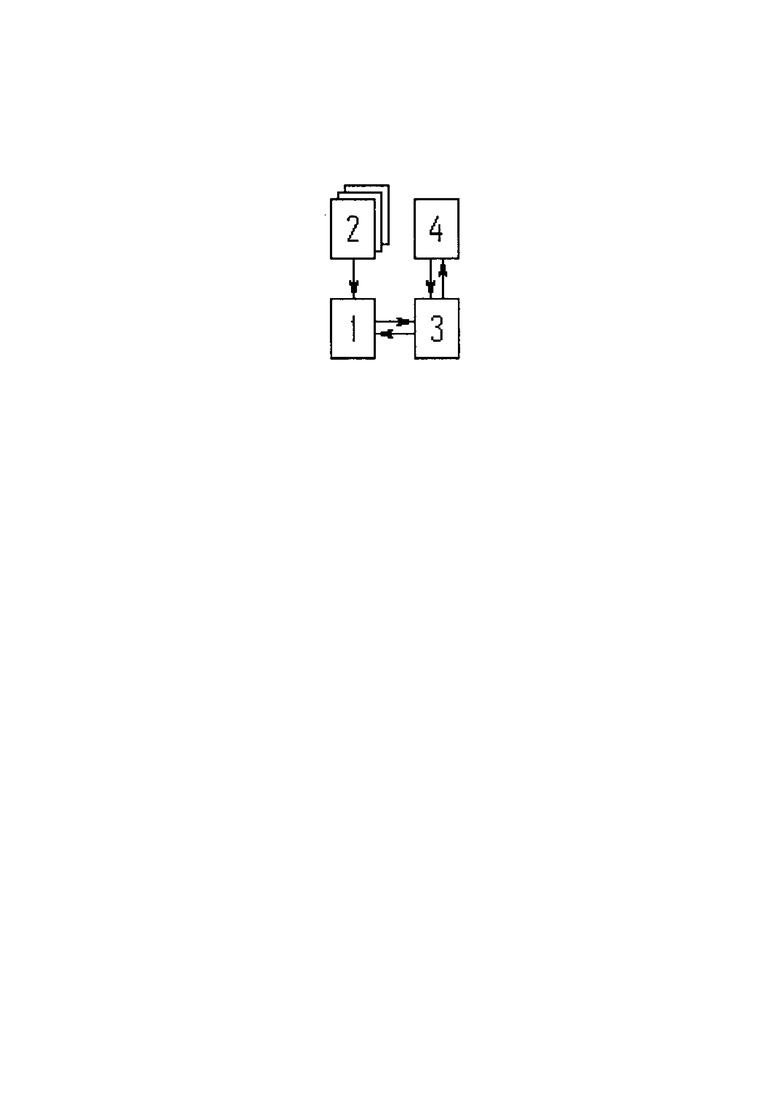
Предложенный способ может быть реализован в системе, блок-схема которой приведена на чертеже.
Блоки: 1 - ОНС; 2 - свои объекты; 3 - СУ; 4 - ракета.
Связи между блоками: 1-3 - данные ракеты, расчетные траектория и скорость движения ракеты к месту выхода на встречный курс, а также расчетные траектория и скорость движения ракеты к цели; 2-1 - текущие координаты и скорости своих объектов; 3-1 - текущие координаты и скорость ракеты; 3-4 - команды наведения ракеты на место выхода на встречный курс по расчетной траектории с расчетной скоростью, а также команды наведения ракеты на цель по расчетной траектории с расчетной скоростью; 4-3 - текущие координаты и скорость ракеты.
Изобретение относится к системам наведения ракет. В оборонительно-наступательной системе (ОНС) определяют координаты, скорость и характеристики цели. На объектах определяют их координаты и скорости и передают их в ОНС, где определяют траектории цели и объектов и прогнозируют их продолжение. В ОНС определяют координаты точки прицеливания, прогнозируют траектории и скорости обломков при столкновении ракеты с точкой прицеливания на продолжении траектории цели, определяют координаты мест уничтожения цели с минимальной вероятностью ущерба объектам обломками, определяют координаты места и время уничтожения цели, определяют траекторию цели, относительно которой она маневрирует, и прогнозируют ее продолжение, на котором определяют координаты места и время выхода ракеты на встречный курс. В ОНС назначают ракету и станцию управления (СУ) и передают данные ракеты на СУ, где запускают ракету. На ракете определяют ее координаты и скорость и передают их через СУ в ОНС, где рассчитывают траекторию и скорость ракеты и передают их на СУ, где формируют команды наведения ракеты на место выхода на встречный курс и на цель и передают их на ракету. Технический результат – снижение вероятности причинения ущерба объектам обломками, образовавшимися при уничтожении цели. 1 ил.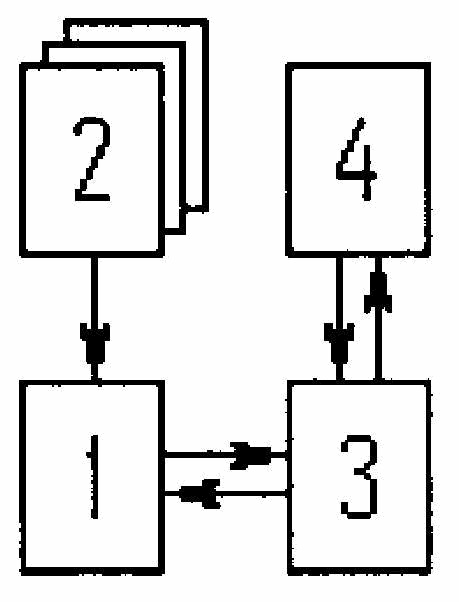
Способ уничтожения гиперзвуковой маневрирующей цели ракетой, заключающийся в том, что в оборонительно-наступательной системе (ОНС) обнаруживают и сопровождают цель и определяют текущие координаты и скорость цели, а также ее характеристики; в ОНС определяют текущие координаты точки прицеливания для ракеты; в ОНС определяют траекторию цели, относительно которой она маневрирует, и прогнозируют ее продолжение; в ОНС определяют текущие координаты места выхода ракеты на встречный курс на продолжении траектории цели, относительно которой она маневрирует; в ОНС назначают ракету и станцию управления (СУ) для вывода ракеты на встречный курс и уничтожения цели и передают данные ракеты на СУ; на СУ запускают ракету; на ракете определяют ее текущие координаты и скорость и передают их через СУ в ОНС; в ОНС рассчитывают траекторию и скорость движения ракеты к месту выхода на встречный курс и передают их на СУ; на СУ формируют команды наведения ракеты на место выхода на встречный курс по расчетной траектории с расчетной скоростью и передают их на ракету; в ОНС после выхода ракеты на встречный курс рассчитывают траекторию и скорость движения ракеты к цели и передают их на СУ; на СУ формируют команды наведения ракеты на цель по расчетной траектории с расчетной скоростью и передают их на ракету, отличающийся тем, что на своих объектах определяют их текущие координаты и скорости и передают их в ОНС; в ОНС определяют траекторию цели, а также траектории своих объектов, и прогнозируют их продолжение; в ОНС прогнозируют траектории и скорости движения обломков, которые образуются при столкновении ракеты с точкой прицеливания в каждом месте продолжения траектории цели; в ОНС определяют координаты мест уничтожения цели, в которых вероятность причинения ущерба своим объектам обломками минимальна, на продолжении траектории цели; в ОНС определяют текущие координаты места уничтожения цели на продолжении ее траектории и время появления цели там; в ОНС определяют также время выхода ракеты на встречный курс.
| СПОСОБ УНИЧТОЖЕНИЯ ГИПЕРЗВУКОВОЙ МАНЕВРИРУЮЩЕЙ ЦЕЛИ РАКЕТОЙ | 2021 |
|
RU2768062C1 |
| СПОСОБ КОНТРОЛЯ ПОРАЖЕНИЯ ЦЕЛИ КРЫЛАТОЙ РАКЕТОЙ | 2016 |
|
RU2666001C2 |
| US 20060238403 A1, 26.10.2006 | |||
| US 20140076130 A1, 20.03.2014. | |||

