Изобретение относится к космической технике и может быть использовано в системах управления ориентацией космических аппаратов (КА), снабженных бортовым ретрансляционным комплексом, для коррекции ориентации КА.
Известны различные способы управления ориентацией космического аппарата (И.Ф. Кавинов "Инерциальная навигация в околоземном пространстве". М., "Машиностроение", 1988 г., с. 39-58). В качестве одного из небесных ориентиров при космических полетах используется Солнце, как источник мощнейшего излучения практически во всем диапазоне длин волн. Разработана методика восстановления ориентации КА в случае визирования Солнца и звезды. После поиска Солнца и требуемой звезды, зная координаты Солнца и звезды в поле зрения солнечного и звездного датчиков, а, следовательно, и в связанной с КА системе координат, координаты астроориентиров в абсолютной системе координат и расчетную ориентацию КА, определяют отклонение текущей ориентации КА от расчетной. Производят коррекцию ориентации КА.
К недостаткам такого способа относится необходимость поиска астроориентиров, большие угловые размеры Солнца, приводящие к ухудшению точности определения текущей ориентации, невозможность реализации при нахождении КА в тени планеты.
Известен также способ управления ориентацией КА (Б.В.Раушенбах, Е.Н.Токарь "Управление ориентацией космических аппаратов". М., "Наука", 1974 г., стр. 79-92), включающий определение, построение и поддержание исходной ориентации космического аппарата, измерение исходных и текущих параметров источников сигнала, в качестве которых используются звезды, определение по текущим и исходным параметрам источников сигнала (координатам звезд в абсолютной и связанной с КА системах координат) текущей ориентации космического аппарата, и коррекцию ориентации космического аппарата путем его разворота из текущей ориентации в исходную с помощью исполнительных органов КА, например, гиродинов. Наиболее распространено управление ориентацией КА, при котором определение текущей ориентации осуществляется по двум или более звездам. Объясняется такая популярность этого способа тем, что, во-первых, при движении аппарата около Земли направление на звезды относительно абсолютной системы координат можно считать неизменным, а во-вторых, угловые размеры звезд малы и, следовательно, их можно не учитывать при расчете углов ориентации линии визирования. После отождествления наблюдаемых звездным датчиком звезд, зная их координаты в поле зрения звездного датчика, а, следовательно, и в связанной с КА системе координат, координаты наблюдаемых датчиком звезд в абсолютной системе координат и расчетную ориентацию КА, определяют отклонение текущей ориентации КА от расчетной. После этого рассчитывают требуемый управляющий момент и с помощью исполнительных органов, например, силовых гироскопов, формируют этот момент, разворачивая спутник в требуемую ориентацию.
К недостаткам такого способа относится возможность засветки звездного датчика при движении по освещенной Солнцем части орбиты или в условиях высокой солнечной активности, при которой плотность потока заряженных частиц высока и это может привести к сбоям в работе звездных датчиков и, как следствие, к невозможности их использования.
Прототипом изобретения является способ поддержания трехосной ориентации космического аппарата с силовыми гироскопами и целевой нагрузкой (RU 2356802, кл. В64G1/00, 2009 г.), включающий математическое моделирование орбиты космического аппарата, измерение параметров его углового движения, определение, построение и поддержание по ним заданной ориентации космического аппарата, измерение кинетического момента в системе силовых гироскопов. По измеренным параметрам углового движения и значениям кинетического момента в системе силовых гироскопов определяют закон изменения действующего на космический аппарат суммарного возмущающего момента, определяют номинальные рабочие параметры целевой нагрузки при штатной ориентации космического аппарата, определяют интервалы времени Δti=(ti0, tik), на которых измерение параметров углового движения не выполняется, где i=1,2,…n - номера указанных интервалов времени. К моменту начала i-го интервала выполняют смещение кинетического момента в системе силовых гироскопов в направлении оси космического аппарата, ориентируемой по вектору орбитальной угловой скорости, уточняют на момент времени ti0 начала i-го интервала по измеренным параметрам углового движения космического аппарата и кинетического момента в системе силовых гироскопов начальные значения параметров углового движения космического аппарата и указанный кинетический момент, используя уточненные на момент времени ti0 параметры углового движения и кинетического момента силовых гироскопов, учитывая определенный ранее закон изменения суммарного возмущающего момента, прогнозируют на i-м интервале изменение кинетического момента в системе силовых гироскопов, соответствующее поддержанию заданной ориентации космического аппарата. Для поддержания этой ориентации на i-ом интервале воздействуют на силовые гироскопы таким образом, чтобы их кинетический момент в каждый момент времени i-го интервала соответствовал спрогнозированному. Измеряют рабочие параметры целевой нагрузки и сравнивают их с номинальными рабочими параметрами. В случае соответствия сравниваемых параметров продолжают управление ориентацией космического аппарата по спрогнозированному кинетическому моменту. В противном случае с момента времени ti1 взаимного несоответствия указанных параметров целевой нагрузки, повторно измеряют параметры углового движения космического аппарата. Определяют по параметрам его текущую ориентацию, строят заданную ориентацию, на интервале времени  определяют новый закон изменения суммарного возмущающего момента, действующего на космический аппарат, и, если выполняется условие
определяют новый закон изменения суммарного возмущающего момента, действующего на космический аппарат, и, если выполняется условие  , то производят смещение кинетического момента в системе силовых гироскопов в направлении оси космического аппарата, ориентируемой по вектору орбитальной угловой скорости. Уточняют на момент времени ti1 по измеренным параметрам углового движения космического аппарата и кинетического момента в системе силовых гироскопов начальные значения параметров углового движения космического аппарата и указанного кинетического момента, с использованием уточненных на момент времени
, то производят смещение кинетического момента в системе силовых гироскопов в направлении оси космического аппарата, ориентируемой по вектору орбитальной угловой скорости. Уточняют на момент времени ti1 по измеренным параметрам углового движения космического аппарата и кинетического момента в системе силовых гироскопов начальные значения параметров углового движения космического аппарата и указанного кинетического момента, с использованием уточненных на момент времени  значений указанных кинетического момента и параметров углового движения, прогнозируют изменение кинетического момента в системе силовых гироскопов на оставшейся части i-го интервала, используя упомянутый новый закон изменения суммарного возмущающего момента, и продолжают управлять ориентацией космического аппарата по спрогнозированному кинетическому моменту в системе силовых гироскопов вышеуказанным образом. В противном же случае продолжают управление ориентацией космического аппарата по измеряемым параметрам углового движения.
значений указанных кинетического момента и параметров углового движения, прогнозируют изменение кинетического момента в системе силовых гироскопов на оставшейся части i-го интервала, используя упомянутый новый закон изменения суммарного возмущающего момента, и продолжают управлять ориентацией космического аппарата по спрогнозированному кинетическому моменту в системе силовых гироскопов вышеуказанным образом. В противном же случае продолжают управление ориентацией космического аппарата по измеряемым параметрам углового движения.
Данный способ используют для определения ориентации спутника путем измерения на территориально разнесенных земных станциях спутниковой связи значений мощности высокостабильного радиосигнала, излучаемого бортовым радиотехническим комплексом. Вычисляя разность измеренных сигналов в моменты времени tk и эталонных значений сигналов вычисляют кинематические параметры спутника, после чего выполняют расчет требуемого управляющего момента и, воздействуя определенным образом на исполнительные органы, например маховики, выполняют разворот КА с целью поддержания требуемой ориентации.
К недостаткам такого способа относится необходимость использования территориально разнесенных земных станций, с установленным на каждой оборудованием для измерения мощности принимаемого от КА эталонного сигнала и передаче значений мощности измеренного сигнала по наземным или спутниковым каналам связи в вычислительный комплекс для обработки. Все перечисленное приводит к увеличению времени расчетов, снижению надежности, т.к. приходится использовать дополнительное оборудование и физические каналы связи, а также необходимости существенных финансовых затрат на приобретение оборудования и его техническое обслуживание.
Проблемой, на которую направлено изобретение, является разработка нового способа, обеспечивающего ориентацию космического аппарата при его работе в штатном режиме, с использованием одной центральной станции спутниковой связи.
Техническим решением изобретения является упрощение управлением ориентацией космического аппарата, а также повышение точности и надежности. (Технический результат удалять нельзя, его можно только редактировать, Этот раздел является таким же важным для эксперта, как и формула изобретения, т.к. экспертиза проводится в отношении технического результат. При этом данное выражение должно обязательно присутствовать даже с формальной точки зрения, иначе будет запрос для указания технического результата).
Поставленная проблема и указанный технический результат достигаются тем, что способ управления ориентацией космического аппарата, снабженного бортовым ретрансляционным комплексом, включает математическое моделирование орбиты космического аппарата, измерение параметров его углового движения, определение, построение и поддержание по ним заданной ориентации космического аппарата, измерение кинетического момента в системе силовых гироскопов, определение действующих на космический аппарат возмущающих моментов по измеренным параметрам углового движения и значениям кинетического момента силовых гироскопов. Согласно изобретению выбирают из всей совокупности радиосигналов от территориально разнесенных земных станций спутниковой связи, ретранслируемых через бортовой ретрансляционный комплекс, те, мощность которых наиболее сильно меняется при изменении ориентации спутника. Для чего, последовательно выполняют разворот спутника вокруг осей связанной с ним системы координат, измеряя значения мощности, принимаемых на центральную станцию спутниковой связи сигналов бортового ретрансляционного комплекса при разной ориентации космического аппарата, определяют закон изменения выбранных сигналов dPi, где i – номер выбранного сигнала, в зависимости от ориентации спутника. Перед переходом к управлению ориентацией спутника по изменению измеренных выбранных сигналов в штатной ориентации космического аппарата измеряют начальные значения выбранных сигналов Pi(t0) на момент времени t0. В последующие моменты времени tк, где k=1, 2,…m, на всем интервале управления ориентацией спутника от t1 до tm измеряют значения мощности выбранных сигналов Pi(tk), принимаемых на центральной станции, и по определенным ранее законам изменения выбранных сигналов и их начальным значениям рассчитывают угловую скорость  (tк) и углы ориентации спутника λx(tk), λy(tk), λz(tk) на момент времени tк, с учетом рассчитанного на этот же момент времени возмущающего момента, определяют требуемый управляющий момент исполнительных органов, например, силовых гироскопов
(tк) и углы ориентации спутника λx(tk), λy(tk), λz(tk) на момент времени tк, с учетом рассчитанного на этот же момент времени возмущающего момента, определяют требуемый управляющий момент исполнительных органов, например, силовых гироскопов  упр(tk) и воздействуют на них путем выработки ими этого управляющего момента для разворота космического аппарата в требуемую ориентацию. Далее, в последующие моменты времени tк повторяют измерение значений принимаемых станцией радиосигналов и рассчитывают параметры углового движения спутника, требуемых управляющих моментов и формируют эти моменты для исполнительных органов с целью поддержания требуемой ориентации спутника.
упр(tk) и воздействуют на них путем выработки ими этого управляющего момента для разворота космического аппарата в требуемую ориентацию. Далее, в последующие моменты времени tк повторяют измерение значений принимаемых станцией радиосигналов и рассчитывают параметры углового движения спутника, требуемых управляющих моментов и формируют эти моменты для исполнительных органов с целью поддержания требуемой ориентации спутника.
Весь процесс управления ориентацией можно разделить на три этапа. На первом, подготовительном этапе, необходимо из всей совокупности радиосигналов от территориально разнесенных земных станций спутниковой связи (ЗССС), ретранслируемых через бортовой радиотехнический комплекс (БРК), выбрать такие, которые наиболее чувствительны к изменению ориентации спутника, т.е. те сигналы, мощность которых при приеме центральной станцией (ЦЗССС) меняется наиболее заметно. Далее необходимо сформулировать функциональные зависимости мощности этих сигналов от ориентации спутника. На втором этапе перед переходом к управлению ориентацией КА по сигналам БРК измеряют исходные значения всех выбранных сигналов Pi(t0), где i=1,…n – номер выбранного сигнала.
В последующем, расчет требуемых управляющих моментов будут выполнять исходя из отличий, измеряемых на каждом шаге управления текущих значений мощности сигналов с их измеренными в начальный момент времени значениями. На третьем этапе по измеренным на ЦЗССС сигналам Pi(tk) и исходным сигналам производят определение текущей ориентация КА. На третьем этапе производят расчет требуемых управляющих моментов Мупр и выполняют коррекцию ориентации КА.
Для осуществления предлагаемого способа управления ориентацией спутника необходимы:
- передающая земная станция спутниковой связи (ЗССС);
- бортовой радиотехнический комплекс (БРК) КА;
- приёмная центральная земная станция спутниковой связи (ЦЗССС);
- программно-аппаратный комплекс, предназначенный для обработки принятых ЦЗССС сигналов и расчёта кинематических параметров КА.
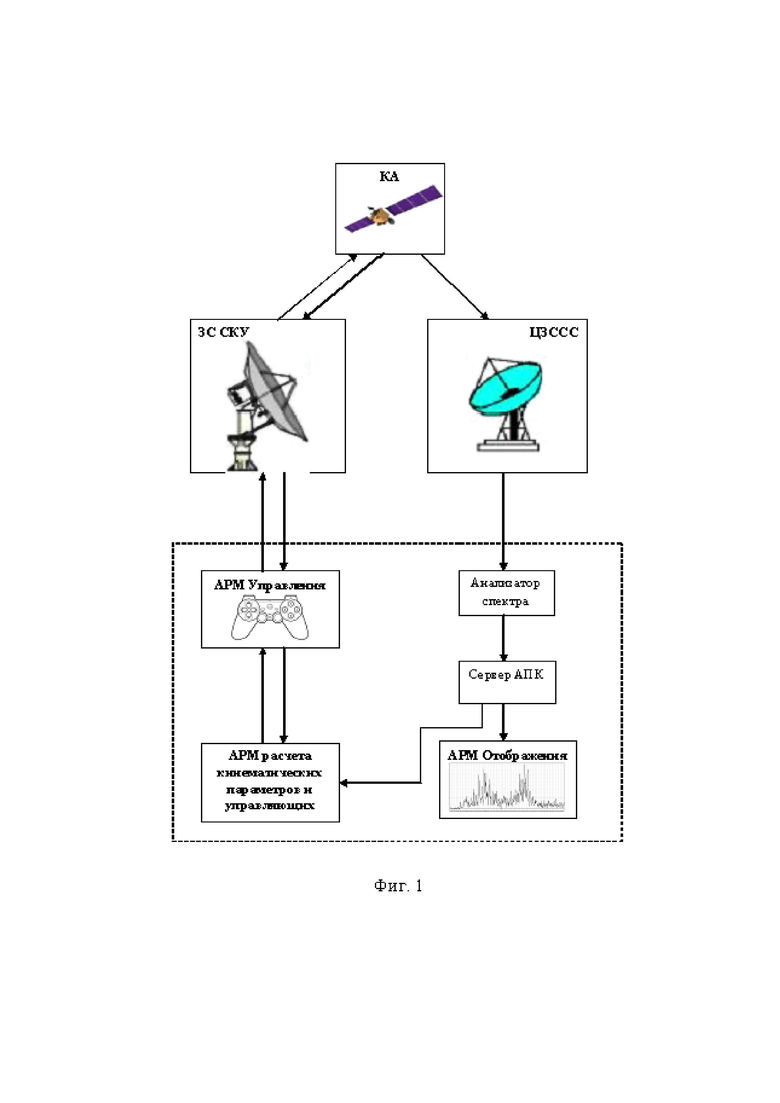
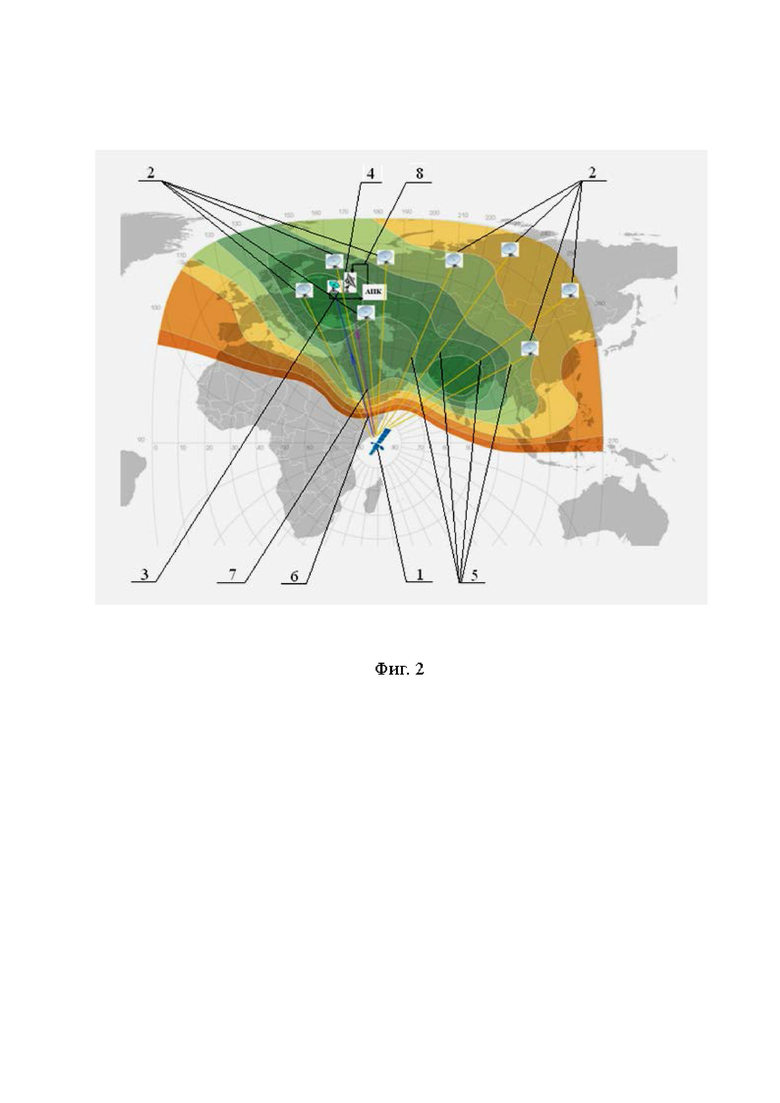
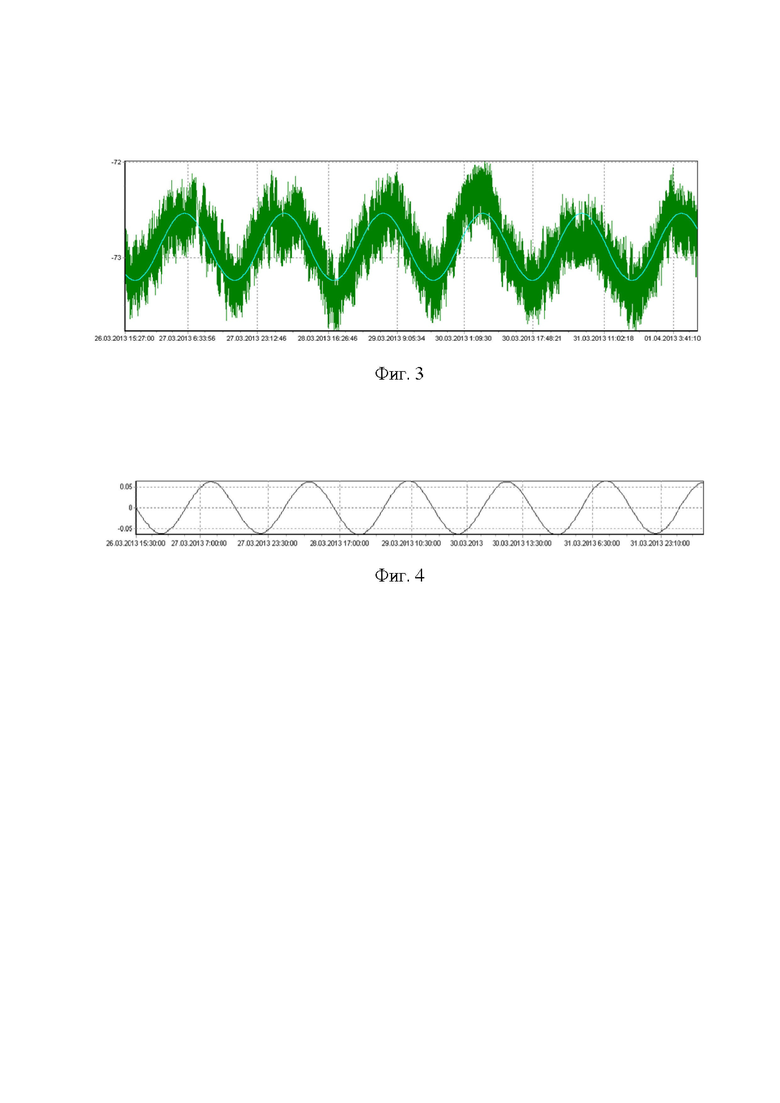
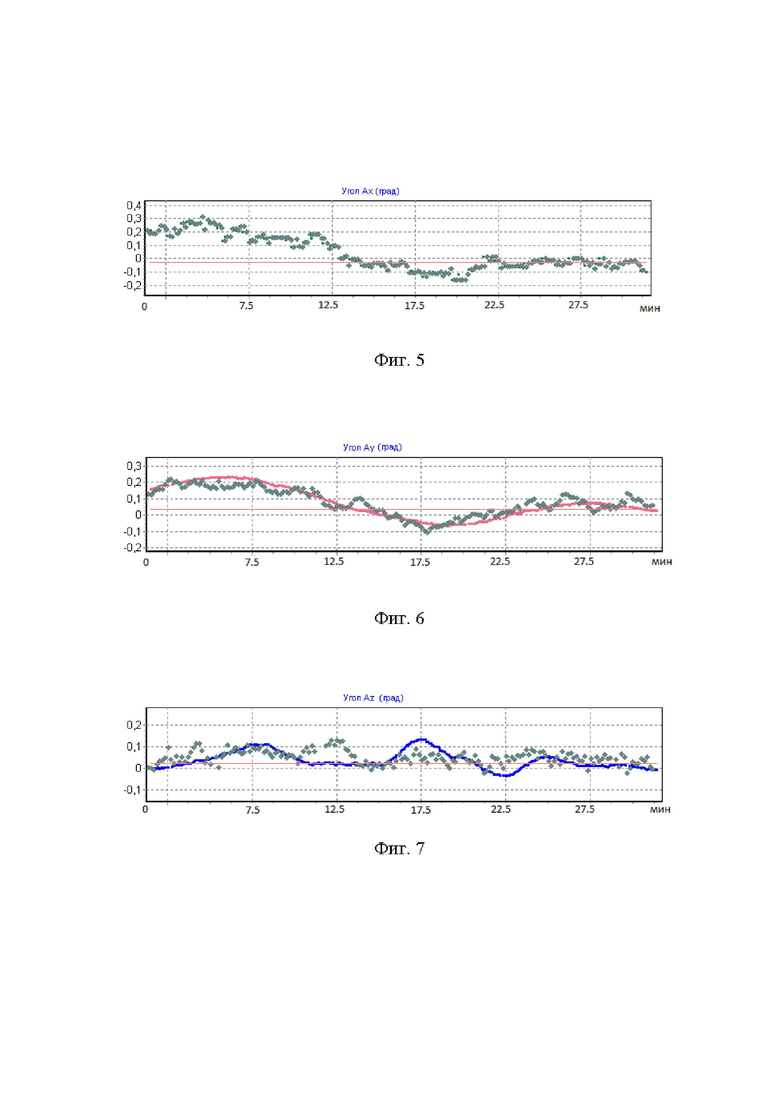
Способ управления ориентацией космического аппарата, снабженного бортовым ретрансляционным комплексом иллюстрируется следующими чертежами, где на фиг. 1 показана схема системы управления ориентацией КА, реализующая предлагаемый способ управления ориентацией спутника; на фиг.2 схематично показаны взаимосвязи между передающими земными станциями, в качестве которых могут использоваться ЗССС потребителей частотного ресурса, КА, ЦЗССС, АПК и ЗС СКУ; на фиг. 3 представлено изменение уровня мощности одного из сигналов при поддержании штатной ориентации с погрешностью не более  на интервале в несколько суток (колебания сигнала обусловлены движением спутника по широте в пределах 0.05º); на фиг. 4 - график отклонения спутника по широте от плоскости геостационарной орбиты; на фиг 5, 6 и 7 результаты расчёта углов ориентации спутника (по каналам рысканья, крена и тангажа, соответственно) предлагаемым способом (серые точки) с отображением углов ориентации, измеренных бортовым звездным датчиком (зеленые, красные и синие точки, соответственно).
на интервале в несколько суток (колебания сигнала обусловлены движением спутника по широте в пределах 0.05º); на фиг. 4 - график отклонения спутника по широте от плоскости геостационарной орбиты; на фиг 5, 6 и 7 результаты расчёта углов ориентации спутника (по каналам рысканья, крена и тангажа, соответственно) предлагаемым способом (серые точки) с отображением углов ориентации, измеренных бортовым звездным датчиком (зеленые, красные и синие точки, соответственно).
Принимаемая земной станцией служебного канала управления (ЗС СКУ) телеметрическая информация от спутника через автоматизированное рабочее место (АРМ управления) поступает в АРМ определения кинематических параметров спутника (АРМ КП), где она обрабатывается специально разработанным программным обеспечением. Через центральную земную станцию спутниковой связи (ЦЗССС) принимаются ретранслированные БРК сигналы, которые сканируются анализатором сигналов. После предварительной обработки эта информация передается в АРМ КП, где проходит дополнительную обработку и выполняется оценка кинематических параметров спутника и управляющих моментов, которые должны быть реализованы исполнительными органами КА с целью поддержания его требуемой ориентации.
В качестве ЦЗССС могут использовать штатные станции потребителей радиочастотного ресурса КА, поднимающие на спутник сигнал. Доработка станций, изменение характеристик сигнала не требуется. Единственное условие – отсутствие автоматической регулировки мощности сигнала.
Взаимосвязь между передающими земными станциями, бортовым радиотехническим комплексом космического аппарата и приёмной центральной земной станцией спутниковой связи, иллюстрируется на фиг. 2, на которой:
1 – космический аппарат (КА);
2 - передающая земная станция спутниковой связи (ЗССС);
3 - приёмная центральная земная станция спутниковой связи (ЦЗССС);
4 – земная станция служебного канала управления (ЗС СКУ) которая организует командную радиолинию, прием телеметрической информации и проведение траекторных измерений орбиты КА.
5 – сигналы, поднимаемые на КА, передающими земными станциями спутниковой связи;
6 - ретранслированные сигналы, принимаемые центральной земной станцией спутниковой связи;
7- сигналы командной радиолинии (канал передачи массивов цифровой информации из центра управления полетом на КА);
8 –углы ориентации (или управляющие моменты), рассчитанные аппаратно-программным комплексом (АПК), подготовленные для передачи на КА через командную радиолинию.
На начальном этапе выбираются передающие земные станции потребителей 2 частотного ресурса, расположенные как можно ближе к краю диаграммы направленности антенн БРК КА (фиг. 2). Сигналы 5 потребителей частотного ресурса передаются на КА 1 для последующей их ретрансляции. В ЦУП установлена ЦЗССС 3, принимающая ретранслированные сигналы 6 передающих земных станций потребителей частотного ресурса. Сигналы 6, принятые ЦЗССС 3, передаются в аппаратно - программный комплекс (АПК), основным элементом которого является анализатор спектра. Работая по сформированному для него заданию, АПК выбирает из всего спектра сигналов 6, ретранслируемых БРК, только те, которые были выбраны на подготовительном этапе, передаёт их характеристики на сервер, где осуществляется окончательная обработка, их архивирование и передача величин мощности каждого выбранного сигнала на автоматизированное рабочее место для расчётов кинематических параметров, в котором производится расчет ориентации КА и управляющие моменты для парирования отклонений от штатной ориентации. Рассчитанные углы ориентации (или управляющие моменты) 8 передаются на АРМ управления КА для передачи их на КА через земную станцию служебного канала управления 4.
Определение ориентации спутника выполняется по анализу изменения мощности принимаемых сигналов 6. Основные требования к сигналам 5 передающих станций следующие:
- стабильность – на больших временных интервалах сигнал меняется несущественно при штатной ориентации спутника или его изменение предсказуемо и, следовательно, может быть описано с помощью каких-либо математических функций;
- изменение сигнала, вызванное разворотом КА, можно описать линейной функцией (по крайней мере, при разворотах в пределах 0.50, что более, чем достаточно, учитывая требования по точности ориентации);
- сигналы, выбираемые для оценки углов ориентации, должны меняться больше при развороте по крену и в меньшей степени по тангажу и рысканию.
Аналогично сигналы, выбираемые для оценки угла тангажа, должны меняться больше при развороте по тангажу и в меньшей степени по крену и рысканию и т.п.
Для поиска сигналов, удовлетворяющих перечисленным выше требованиям, нужно последовательно выполнить развороты КА по каналам крена, тангажа и рыскания. По результатам разворотов для выбранных сигналов определяются функциональные зависимости, описывающие их изменение в зависимости от углов ориентации спутника:

где i- номер сигнала,  - коэффициенты, характеризующие изменение i-го сигнала при развороте КА вокруг осей рыскания, крена, тангажа, соответственно;
- коэффициенты, характеризующие изменение i-го сигнала при развороте КА вокруг осей рыскания, крена, тангажа, соответственно;
 - углы разворота спутника вокруг осей рыскания, крена, тангажа, соответственно.
- углы разворота спутника вокруг осей рыскания, крена, тангажа, соответственно.
В общем случае коэффициенты имеют разные значения при развороте КА в положительном и отрицательном направлении и являются функциями углов разворота. Поэтому первый шаг решения – определения наиболее вероятного направления разворота по каждому из каналов управления. Таким образом, выполняется определение области поиска решения, и определяются коэффициенты уравнения (1), которые являются функциями углов, но при малых углах разворота их можно считать константами.
В матричном виде система уравнений, описывающих изменение сигналов при развороте спутника, примет вид
 (2),
(2),
Где:
А - матрица коэффициентов системы уравнений,
 - искомый вектор углов разворота спутника,
- искомый вектор углов разворота спутника,
N- количество сигналов,
 - вектор изменения сигналов БРК, элементы которого получаются из сравнения текущего значения мощности сигнала с его эталонным значением, которое было определено в начале оценки как осреднённое значение мощности каждого сигнала при штатной ориентации спутника (значения углов ориентации близки к нулю).
- вектор изменения сигналов БРК, элементы которого получаются из сравнения текущего значения мощности сигнала с его эталонным значением, которое было определено в начале оценки как осреднённое значение мощности каждого сигнала при штатной ориентации спутника (значения углов ориентации близки к нулю).
При решении задачи вводятся следующие ограничения:
- ориентация спутника в начале решения задачи, оценки углов крена и тангажа соответствует штатной ориентации;
- управление ориентацией строится таким образом, чтобы обеспечить величины углов менее 0.4°, что позволит оставаться в линейной части зависимости изменения мощности от углов разворота спутника и, тем самым, повысить точность получаемых оценок.
В процессе исследований была выявлена зависимость мощности сигналов от положения КА на орбите. Степень зависимости для разных сигналов различна, но некоторые довольно чувствительны даже к небольшому движению спутника относительно рабочей точки (не более 0.05 градуса) – фиг. 4. На фиг. 3 иллюстрируется зависимость мощности сигнала от широты спутника. Средняя амплитуда колебаний составляет 0.35 дБм, что для этого сигнала соответствует развороту КА на  . Для исключения ошибки определения ориентации спутника, вызванной изменением сигнала в результате орбитального движения, формируют функции, учитывающие это изменение. Приближение к сигналам БРК производится для гармонической функции:
. Для исключения ошибки определения ориентации спутника, вызванной изменением сигнала в результате орбитального движения, формируют функции, учитывающие это изменение. Приближение к сигналам БРК производится для гармонической функции:
 , (3)
, (3)
где:
A – амплитуда сигнала,
ω - круговая частота,
φ - начальная фаза,
h - смещение сигнала.
ω = 2π/p, где:
p – период, определяемый по баллистической информации, π=3.1415926.
Определяемые параметры: A, φ, h.
Функция (3) эквивалентна следующей функции:
 , (4)
, (4)
В отличие от (3) определяемые параметры (h, a1, a2) входят в (4) линейно, поэтому функциональное приближение выполняется для (4), и затем определяются параметры A и φ:
A =0.5(a1+a2),
cos(φ) = a1/A, sin(φ) = -a2/A.
Поиск параметров осуществляется по методу наименьших квадратов, для чего минимизируется невязка:
δ(h, a1, a2) = ∑ (Fi - Si)2, (5)
где: Si – сигнал БРК в момент времени ti, Fi = F(ti).
Раскрытие (5) приводит к системе из трех уравнений, линейных относительно
определяемых параметров:
N ∑cos(ωti) ∑sin(ωti) h ∑Si
∑cos(ωti) ∑cos2(ωti) ∑cos(ωti)sin(ωti) a1 = ∑Sicos(ωti) (6),
∑sin(ωti) ∑cos(ωti)sin(ωti) ∑sin2(ωti) a2 ∑Sisin(ωti)
где N – количество обрабатываемых Si.
В (6) под знак ∑ входят только те Si, ti, которые прошли через процедуру отбраковки:
| Fi - Si | < 3σ,
где σ – среднеквадратичное отклонение измерений, σ2 = ∑ (Fi - Si)2/N.
Анализ графиков (фиг.3 и 4) позволяет сделать вывод, что для получения в любой момент времени величины изменения сигнала, вызванной орбитальным движением КА, можно это изменение рассчитывать от времени прохождения восходящего узла орбиты, т.е. отсчитывать от восходящего узла фазу φ. Поэтому везде подразумевается, что ti –это ti – t0, где t0 – время прохождения восходящего узла орбиты.
Полученное описанным способом решение представлено на фиг.3 в виде кривой цвета. Расчётные величины равны:
A=0.3489,
φ=-0.6178,
h=-72.8866,
СКО=0.1857,
период = 23.98 час.
Для учёта указанного изменения сигнала необходимо в (1) вместо  использовать
использовать  , полагая h=0.
, полагая h=0.
Результаты расчёта ориентации спутника предлагаемым способом приведены на фиг. 5, 6 и 7 маркерами тёмно-серого цвета. Маркеры зелёного, красного и синего цвета отображают углы ориентации, измеренные бортовыми датчиками. Как правило, среднее значение углов отличается от указанных на величину, не превышающую 0.1 градуса. Большие отличия могут быть при возникновении на пути сигнала помехи, например, сильного дождя. Если помехи действуют на пути сигнала к спутнику, то с помощью разработанных фильтров такой сигнал отбраковывается и в расчётах углов не участвует. Несколько сложнее задача при возникновении помехи на пути сигналов от КА к приёмной станции. В этом случае изменение всех сигналов имеет один знак и близкие амплитуды, что позволяет построить фильтр и вовремя прекратить управление ориентацией по углам.
Для начала использования метода в целях коррекции необходимы достоверные измерения углов ориентации, полученные от каких-либо датчиков ориентации, например, звёздных. По этим углам выполняется начальная выставка режима. На фиг. 5-7 значения начальных углов ориентации спутника обозначены горизонтальной линией красного цвета. На этот же момент времени определяются значения мощности каждого сигнала, используемого для оценки ориентации. После начальной выставки внешняя информация об ориентации спутника больше не используется.
Способ управления ориентацией космического аппарата, снабженного бортовым ретрансляционным комплексом не ограничивается вышеприведенным описанием, он также может быть реализован, в пределах формулы изобретения, когда расчёт управляющих моментов выполняется на автоматизированном рабочем месте, после чего расчеты штатным каналам наземного контура управления передаются в бортовой комплекс управления (БКУ), который формирует управление исполнительными органами (например, маховиками), создающими требуемый момент для разворота спутника. Также рассчитанные углы могут передаваться в БКУ, который самостоятельно может выполнять расчёт требуемых управляющих моментов и формировать соответствующие команды для маховиков. В любом случае используется штатная, реализованная на КА, схема формирования управляющих воздействий на исполнительные органы системы управления движением.
Предлагаемый способ управления ориентацией космического аппарата, снабженного бортовым ретрансляционным комплексом, позволяет управлять ориентацией КА при его работе в штатном режиме. Точность данного способа зависит в основном от точности определения закона изменения сигнала на ЦЗССС при изменении ориентации КА относительно требуемой.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОДДЕРЖАНИЯ ТРЕХОСНОЙ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА С СИЛОВЫМИ ГИРОСКОПАМИ И ЦЕЛЕВОЙ НАГРУЗКОЙ | 2006 |
|
RU2341419C2 |
| СПОСОБ ПОДДЕРЖАНИЯ ТРЕХОСНОЙ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА С СИЛОВЫМИ ГИРОСКОПАМИ И ЦЕЛЕВОЙ НАГРУЗКОЙ | 2006 |
|
RU2356802C2 |
| СПОСОБ УПРАВЛЕНИЯ КОСМИЧЕСКИМ АППАРАТОМ ДИСТАНЦИОННОГО ЗОНДИРОВАНИЯ ЗЕМЛИ | 2015 |
|
RU2621933C2 |
| СПОСОБ УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ ГЕОСТАЦИОНАРНОГО КОСМИЧЕСКОГО АППАРАТА, ОСНАЩЕННОГО РАДИОМАЯКОМ | 2006 |
|
RU2354590C2 |
| СПОСОБ РЕТРАНСЛЯЦИИ РАДИОСИГНАЛОВ С ГЕОСТАЦИОНАРНОЙ ОРБИТЫ | 2019 |
|
RU2714301C1 |
| Способ зональной регистрации абонентского терминала сети персональной спутниковой связи | 2017 |
|
RU2658879C1 |
| СЛУЖЕБНЫЙ БЛОК КОСМИЧЕСКОЙ ПЛАТФОРМЫ | 2024 |
|
RU2831970C1 |
| СПОСОБ УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ КОСМИЧЕСКОГО АППАРАТА, СНАБЖЕННОГО БОРТОВЫМ РАДИОТЕХНИЧЕСКИМ КОМПЛЕКСОМ | 2006 |
|
RU2355013C2 |
| СПОСОБ ГЛОБАЛЬНОЙ НИЗКООРБИТАЛЬНОЙ СПУТНИКОВОЙ СВЯЗИ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2570833C1 |
| СПОСОБ УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ КОСМИЧЕСКОГО АППАРАТА, СНАБЖЕННОГО БОРТОВЫМ РАДИОТЕХНИЧЕСКИМ КОМПЛЕКСОМ | 2001 |
|
RU2191721C1 |
Изобретение относится к космической технике. Способ управления ориентацией космического аппарата (КА) включает математическое моделирование орбиты КА, измерение параметров его углового движения, определение, построение и поддержание по ним заданной ориентации КА, измерение кинетического момента в системе силовых гироскопов, определение действующих на КА возмущающих моментов по измеренным параметрам углового движения и значениям кинетического момента силовых гироскопов. Из всей совокупности радиосигналов от территориально разнесенных земных станций спутниковой связи, ретранслируемых через бортовой ретрансляционный комплекс, выбирают те, мощность которых наиболее сильно меняется при изменении ориентации КА. Последовательно выполняют разворот КА вокруг осей связанной с ним системы координат, измеряя значения мощности принимаемых на центральную станцию спутниковой связи сигналов бортового ретрансляционного комплекса при разной ориентации КА, определяют закон изменения выбранных сигналов в зависимости от ориентации КА. Техническим результатом изобретения является упрощение управления ориентацией КА, повышение точности и надежности. 7 ил.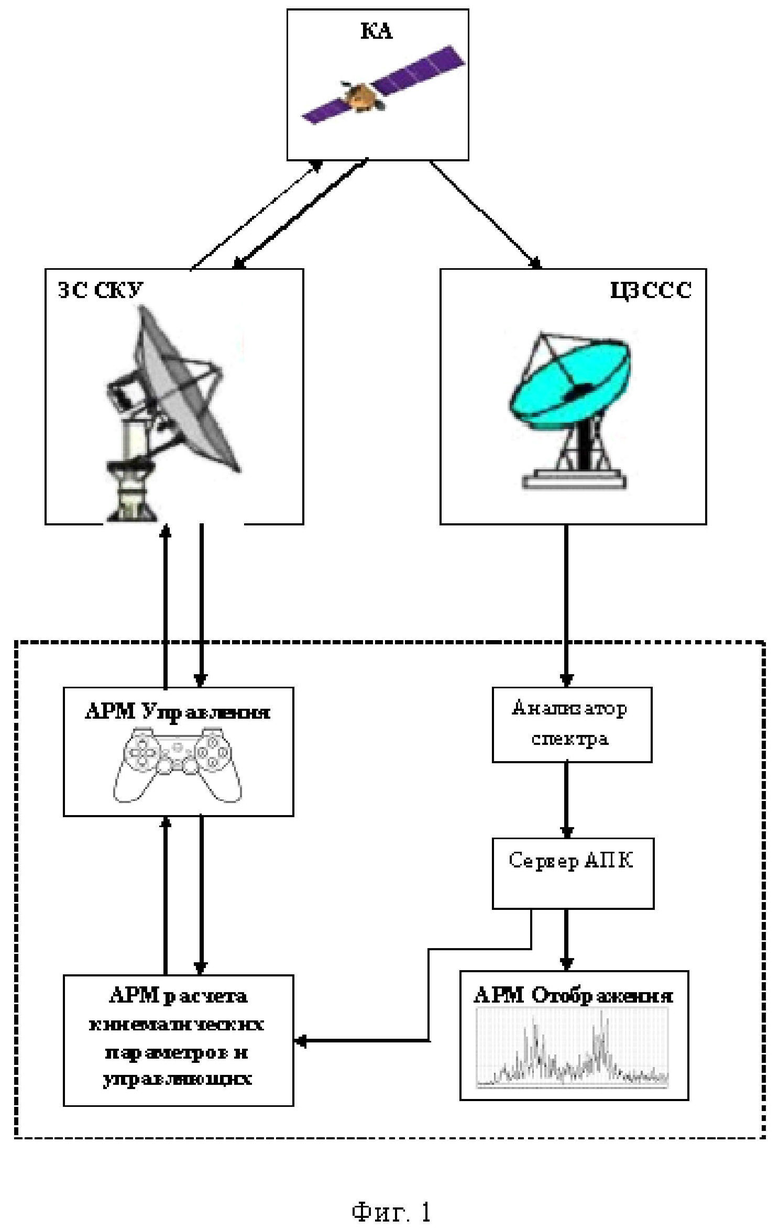
Способ управления ориентацией космического аппарата, снабженного бортовым ретрансляционным комплексом, включающий математическое моделирование орбиты космического аппарата, измерение параметров его углового движения, определение, построение и поддержание по ним заданной ориентации космического аппарата, измерение кинетического момента в системе силовых гироскопов, определение действующих на космический аппарат возмущающих моментов по измеренным параметрам углового движения и значениям кинетического момента силовых гироскопов, отличающийся тем, что выбирают из всей совокупности радиосигналов от территориально разнесенных земных станций спутниковой связи, ретранслируемых через бортовой ретрансляционный комплекс, те, мощность которых наиболее сильно меняется при изменении ориентации спутника, для чего последовательно выполняют разворот спутника вокруг осей связанной с ним системы координат, измеряя значения мощности принимаемых на центральную станцию спутниковой связи сигналов бортового ретрансляционного комплекса при разной ориентации космического аппарата, определяют закон изменения выбранных сигналов dPi, где i – номер выбранного сигнала, в зависимости от ориентации спутника, перед переходом к управлению ориентацией спутника по изменению измеренных выбранных сигналов в штатной ориентации космического аппарата измеряют начальные значения выбранных сигналов Pi(t0) на момент времени t0, в последующие моменты времени tк, где k=1, 2,…m, на всем интервале управления ориентацией спутника от t1 до tm, измеряют значения мощности выбранных сигналов Pi(tk), принимаемых на центральной станции, и по определенным ранее законам изменения выбранных сигналов и их начальным значениям рассчитывают угловую скорость  (tк) и углы ориентации спутника λx(tk), λy(tk), λz(tk) на момент времени tк, с учетом рассчитанного на этот же момент времени возмущающего момента, определяют требуемый управляющий момент исполнительных органов, например силовых гироскопов
(tк) и углы ориентации спутника λx(tk), λy(tk), λz(tk) на момент времени tк, с учетом рассчитанного на этот же момент времени возмущающего момента, определяют требуемый управляющий момент исполнительных органов, например силовых гироскопов  упр(tk), и воздействуют на них путем выработки ими этого управляющего момента для разворота космического аппарата в требуемую ориентацию, далее в последующие моменты времени tк повторяют измерение значений принимаемых станцией радиосигналов и рассчитывают параметры углового движения спутника, требуемых управляющих моментов и формируют эти моменты для исполнительных органов с целью поддержания требуемой ориентации спутника.
упр(tk), и воздействуют на них путем выработки ими этого управляющего момента для разворота космического аппарата в требуемую ориентацию, далее в последующие моменты времени tк повторяют измерение значений принимаемых станцией радиосигналов и рассчитывают параметры углового движения спутника, требуемых управляющих моментов и формируют эти моменты для исполнительных органов с целью поддержания требуемой ориентации спутника.
| СПОСОБ ПОДДЕРЖАНИЯ ТРЕХОСНОЙ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА С СИЛОВЫМИ ГИРОСКОПАМИ И ЦЕЛЕВОЙ НАГРУЗКОЙ | 2006 |
|
RU2356802C2 |
| СПОСОБ АДАПТИВНОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЦЕНТРА МАСС КОСМИЧЕСКОГО АППАРАТА | 2011 |
|
RU2487823C1 |
| Б.В | |||
| Раушенбах, Е.Н | |||
| Токарь "Управление ориентацией космических аппаратов" | |||
| М., "Наука", 1974 г., стр | |||
| Цилиндрический сушильный шкаф с двойными стенками | 0 |
|
SU79A1 |
| СПОСОБ УПРАВЛЕНИЯ КОСМИЧЕСКИМ АППАРАТОМ ПРИ ПОДДЕРЖАНИИ ЗАДАННОЙ ОРИЕНТАЦИИ С ПОМОЩЬЮ РЕАКТИВНЫХ МАХОВИКОВ | 2004 |
|
RU2281233C2 |
| US 6089508 A, 18.07.2000. | |||

