Изобретение относится к пассивным головкам самонаведения (ГСН), используемым для формирования сигналов управления высокоточным оружием.
Известно устройство (аналог) к заявляемому решению - телевизионное следящее устройство корреляционного типа [RU 2364927 С1, 20.08.2009], содержащее последовательно соединенные приемное устройство, коррелятор, коммутатор, устройство электронное, гиростабилизатор, выход которого является выходом пассивной головки самонаведения и соединен с входом приемного устройства, и вычислительное устройство, выход которого соединен со вторым входом коммутатора, а также пороговое устройство, вход которого соединен со вторым выходом коррелятора, а выход соединен с третьим входом коммутатора.
Недостатком известного телевизионного следящего устройства корреляционного типа является низкая помехоустойчивость при попадании помехи в следящий строб и плавном переходе ГСН на сопровождение помехового сигнала.
Наиболее близким по технической сущности является пассивная головка самонаведения (прототип) [RU 2655516 С1, 28.05.2018]. Пассивная ГСН содержит приемное устройство, коррелятор, коммутатор, анализатор помех, устройство электронное, гиростабилизатор и вычислительное устройство.
Недостатком известной пассивной ГСН является низкая точность наведения при воздействии пространственно-протяженной маскирующей помехи.
Техническим результатом изобретения является повышение точности наведения ГСН при воздействии помехи, в том числе пространственно-протяженной маскирующей, за счет замены реального текущего изображения на его копию, которая в реальном масштабе времени динамично изменяется в соответствии с изменением параметров полета ГСН.
Указанный технический результат достигается тем, что в известной пассивной головке самонаведения, содержащей анализатор помех, вычислительное устройство, последовательно соединенные приемное устройство, первый коррелятор, коммутатор, устройство электронное и гиростабилизатор, выход которого является выходом пассивной головки самонаведения и соединен с объединенными входами приемного устройства и вычислительного устройства, кроме того вход и выход анализатора помех соединены с выходом первого коррелятор и вторым входом коммутатора соответственно, дополнительно введены, последовательно соединенные формирователь опорного изображения, анализатор изображения и второй коррелятор, выход которого соединен с третьим входом коммутатора, при этом, первый вход формирователя опорного изображения соединен с выходов вычислительного устройства, а второй выход приемного устройства соединен с объединенными вторыми входами формирователя опорного изображения и анализатора изображения.
Сущность изобретения заключается в следующем. Наведение на цель высокоточного оружия с пассивной ГСН осуществляется по измеренным пространственным координатам цели в принятом текущем изображении.
При возникновении помехи на текущем изображении и ее попадании в следящий строб пассивной ГСН может иметь место плавный переход ГСН на сопровождение помехового сигнала.
В прототипе предложено повысить помехоустойчивость ГСН за счет формирования периферийного строба с большим (не менее чем в два раза) размером области анализа и перехода при наличии помехи в основном следящем стробе на сопровождение цели в область анализа текущего изображения, охваченного периферийным следящим стробом.
В результате воздействия пространственно-протяженной маскирующей помехи на пассивную ГСН возникает ситуация, когда помеха формируется в обеих областях анализа текущего изображения, охваченных основным и периферийным следящими стробами. Пассивная ГСН переходит на сопровождение цели по данным системы счисления координат цели, что приводит к снижению точности наведения ГСН, особенно при отсутствии коррекции координат цели.
В изобретении наведение ГСН на цель в условиях воздействия помехи, в том числе пространственно-протяженной маскирующей, создающей сильные искажения полезного сигнала (изображения цели), осуществляется не по принятому текущему изображению, а по его копии, в которой искаженная помехой часть изображения цели восстанавливается по опорному изображению.
В заявленное устройство введены формирователь опорного изображения, анализатор изображения и второй коррелятор, которые в реальном масштабе времени динамично формируют в соответствии с изменением параметров полета ГСН опорное изображение, копию принятому текущему изображению без искажения помехой изображения цели и величину сдвига копии принятого текущего изображения цели относительно опорного изображения соответственно. Исходное опорное изображение формируется до полета или в процессе полета носителя высокоточного оружия по первому текущему изображению после захвата ГСН цели на автосопровождение.
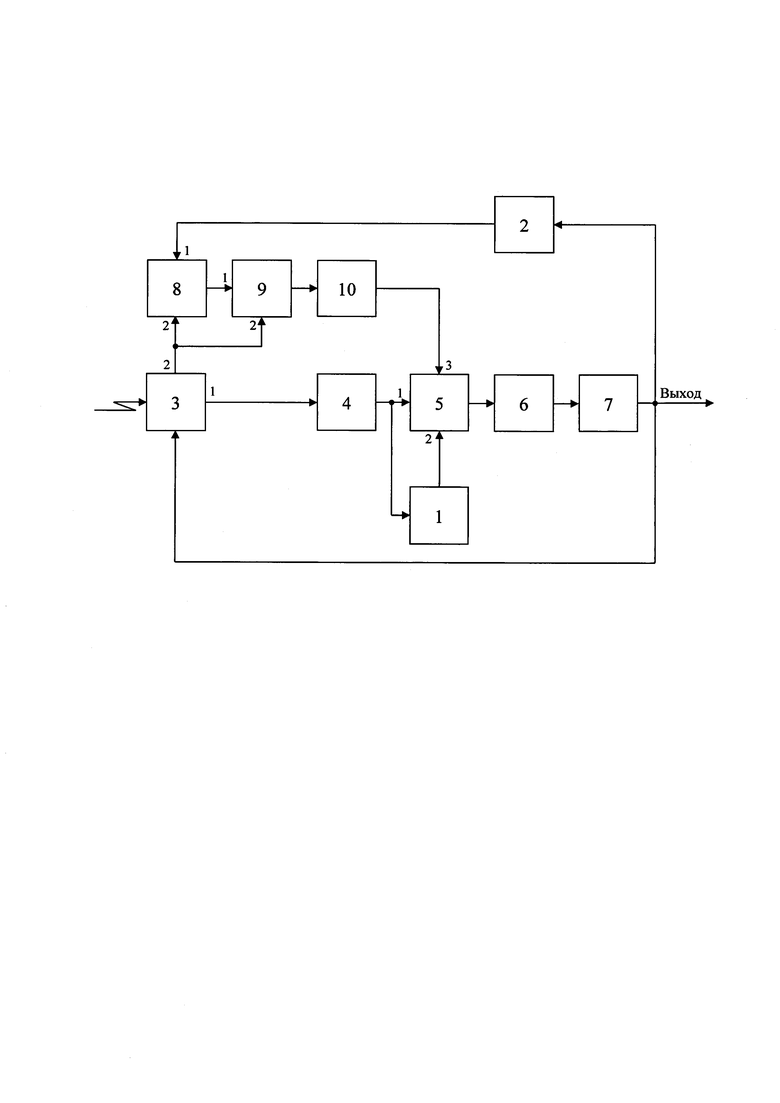
На фигуре приведена структурная схема пассивной ГСН, где обозначено: 1 - анализатор помех, 2 - вычислительное устройство, 3 - приемное устройство, 4 - первый коррелятор, 5 - коммутатор, 6 - устройство электронное, 7 - гиростабилизатор, 8 - формирователь опорного изображения, 9 - анализатор изображения, 10 - второй коррелятор.
Формирователь опорного изображения 8 предназначен для формирования опорного изображения цели в реальном масштабе времени в соответствии с изменением параметров полета ГСН, по сигналу с выхода вычислительного устройства 2.
Формирователь опорного изображения 8 может быть реализован в виде устройства масштабирования отображаемого изображения [RU 2603533 С2, 27.11.2016].
Анализатор изображения 9 предназначен для анализа уровня сигнала опорного изображения относительно уровня сигнала принятого текущего изображения, выявления искаженной помехой части изображения цели (превышающей заданный порог величины уровня сигнала) и создания в реальном масштабе времени динамично изменяющейся (в соответствии с изменением параметров полета ГСН) копии принятого текущего изображения, в которой искаженная помехой часть изображения цели восстанавливается по опорному изображению.
Анализатор изображения 9 может быть выполнен, например, в виде твердотельного устройства считывания изображений, работа которого основана на сравнении и преобразовании уровня опорного сигнала с уровнем сигнала изображения [RU 2546554 С2, 10.04.2015].
Второй коррелятор 10 предназначен для формирования величины сдвига копии принятого текущего изображения цели, относительно опорного изображения, охваченного следящим стробом. Вариант реализации второго коррелятора 10 по принципу построения аналогичен первому коррелятору 4 и может быть реализован в виде цифрового коррелятора [RU 2051413 С1, 27.12.1995], обладающего возможностью измерения при реверсе движения изображения.
Заявляемая пассивная ГСН работает аналогично прототипу с некоторыми отличиями, которые заключаются в следующем.
Выходной сигнал в виде принятого текущего изображения цели с приемного устройства 3 поступает на вход первого коррелятора 4 и дополнительно на объединенные вторые входы формирователя опорного изображения 8 и анализатора изображения 9. С выхода вычислительного устройства 2 на первый вход формирователя опорного изображения 8 подаются счисленные координаты цели (параметры полета ГСН - дальность до цели, углы тангажа, рысканья) для формирования в реальном масштабе времени опорного изображения за счет масштабирования (увеличения), панорамирования (перемещения) и поворота исходного опорного изображения относительно принятого текущего изображения. Опорное изображение цели с выхода формирователя опорного изображения 8 поступает на первый вход анализатора изображения 9, который формирует на вход второго коррелятора 10 информационный сигнал, характеризующий копию принятого текущего изображения без искажений помехой изображения цели.
Формируемые первым коррелятором 4 и вторым коррелятором 10 сдвиги принятого текущего изображения цели (с первого выхода приемного устройства 3) и его копии (с выхода анализатора изображения 9) относительно опорных изображений поступают на первый и третий входы коммутатора 5 соответственно. Одновременно с выхода первого коррелятора 4 сигнал сдвига принятого текущего изображения цели относительно опорного изображения поступает на вход анализатора помех 1, где осуществляется анализ наличия воздействия помехи, в том числе пространственно-протяженной маскирующей, в области анализа принятого текущего изображения, охваченного следящим стробом. По результатам этого анализа в анализаторе помех 1 формируется управляющий сигнал на второй вход коммутатора 5 для электрического соединения установленных в ГСН блоков. Наличие помехи в области анализа определяется по факту превышения заданного порога величины сдвига текущего изображения цели, относительно его опорного изображения на выходе первого коррелятора 4.
При отсутствии помехи в области анализа принятого текущего изображения, охваченного следящим стробом, анализатор помех 1 подключает к входу электронного устройства 6 выход первого коррелятора 4 и сопровождение цели осуществляется по принятому текущему изображению цели.
При появлении помехи в области анализа принятого текущего изображения, охваченного следящим стробом первого коррелятора 4, анализатор помех 1 подключает к входу электронного устройства 6 выход второго коррелятора 10 и сопровождение цели осуществляется по копии принятого текущего изображения без искажений помехой изображения цели. Таким образом, при воздействии помехи, в том числе пространственно-протяженной маскирующей, пассивная ГСН осуществляет сопровождение цели за счет замены реального текущего изображения на его копию, которая в реальном масштабе времени динамично изменяется в соответствии с изменением параметров полета ГСН. Этим достигается указанный в изобретении технический результат.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПАССИВНАЯ ГОЛОВКА САМОНАВЕДЕНИЯ | 2017 |
|
RU2655516C1 |
| ТЕЛЕВИЗИОННОЕ СЛЕДЯЩЕЕ УСТРОЙСТВО КОРРЕЛЯЦИОННОГО ТИПА | 2007 |
|
RU2364927C1 |
| Зенитный ракетный комплекс | 2017 |
|
RU2651533C1 |
| ПАССИВНАЯ ИНФРАКРАСНАЯ ГОЛОВКА САМОНАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ | 2001 |
|
RU2197709C2 |
| ВЕРТОЛЕТНЫЙ КОМПЛЕКС СОВРЕМЕННОГО БОРТОВОГО ВООРУЖЕНИЯ | 2019 |
|
RU2726301C1 |
| БОРТОВАЯ АППАРАТУРА СИСТЕМ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2002 |
|
RU2207613C1 |
| АКТИВНАЯ ЛАЗЕРНАЯ ГОЛОВКА САМОНАВЕДЕНИЯ | 2013 |
|
RU2573709C2 |
| Система наблюдения и противодействия беспилотным летательным аппаратам | 2020 |
|
RU2738508C1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА СОПРОВОЖДЕНИЯ | 2000 |
|
RU2191407C2 |
| СПОСОБ АВТОМАТИЗАЦИИ ЦЕЛЕУКАЗАНИЯ ПРИ ПРИЦЕЛИВАНИИ НА ВЕРТОЛЕТНОМ КОМПЛЕКСЕ | 2018 |
|
RU2697939C1 |
Изобретение относится к пассивным головкам самонаведения, используемым для формирования сигналов управления высокоточным оружием. Пассивная головка самонаведения содержит анализатор помех, вычислительное устройство, последовательно соединенные приемное устройство, первый коррелятор, коммутатор, устройство электронное и гиростабилизатор, выход которого является выходом пассивной головки самонаведения и соединен с объединенными входами приемного устройства и вычислительного устройства. Вход и выход анализатора помех соединены с выходом первого коррелятора и вторым входом коммутатора соответственно. Дополнительно введены последовательно соединенные формирователь опорного изображения, анализатор изображения и второй коррелятор, выход которого соединен с третьим входом коммутатора. Первый вход формирователя опорного изображения соединен с выходом вычислительного устройства. Второй выход приемного устройства соединен с объединенными вторыми входами формирователя опорного изображения и анализатора изображения. Техническим результатом изобретения является повышение точности наведения головки самонаведения при воздействии помехи, в том числе пространственно-протяженной маскирующей, за счет замены реального текущего изображения на его копию, которая в реальном масштабе времени динамично изменяется в соответствии с изменением параметров полета головки самонаведения. 1 ил.
Пассивная головка самонаведения, содержащая анализатор помех, вычислительное устройство, последовательно соединенные приемное устройство, первый коррелятор, коммутатор, устройство электронное и гиростабилизатор, выход которого является выходом пассивной головки самонаведения и соединен с объединенными входами приемного устройства и вычислительного устройства, кроме того, вход и выход анализатора помех соединены с выходом первого коррелятора и вторым входом коммутатора соответственно, отличающаяся тем, что дополнительно введены последовательно соединенные формирователь опорного изображения, анализатор изображения и второй коррелятор, выход которого соединен с третьим входом коммутатора, при этом первый вход формирователя опорного изображения соединен с выходом вычислительного устройства, а второй выход приемного устройства соединен с объединенными вторыми входами формирователя опорного изображения и анализатора изображения.
| ПАССИВНАЯ ГОЛОВКА САМОНАВЕДЕНИЯ | 2017 |
|
RU2655516C1 |
| RU 2058011 C1, 10.04.1996 | |||
| ТЕЛЕВИЗИОННОЕ СЛЕДЯЩЕЕ УСТРОЙСТВО КОРРЕЛЯЦИОННОГО ТИПА | 2007 |
|
RU2364927C1 |
| МАСШТАБИРОВАНИЕ ОТОБРАЖАЕМОГО ИЗОБРАЖЕНИЯ | 2011 |
|
RU2603533C2 |
| US 4037806 A, 26.07.1977 | |||
| JP 2848238 B2, 20.01.1999. | |||

