Изобретение относится к вычислительной технике и может быть использовано для алгоритмического диагностирования и компенсации срыва процесса автоматического сопровождения объекта телевизионным следящим устройством корреляционного типа.
Для получения непрерывной информации о фактических координатах положения объектов используется комплексирование различных средств. Непрерывная информация о прогнозируемом положении объектов, поступающая с системы счисления координат, используется для программного управления визирными системами. Визирные системы периодически используются для коррекции счисленных координат. Информация от таких систем в этом случае имеет более высокий приоритет по сравнению с системами счисления. При этом предполагается, что информация, поступающая от кратковременно применяемых визирных систем, достоверна и надежна (Зенкевич Н.И., Ганулич А.К. Прицельно-навигационные системы, часть 1. / Н.И.Зенкевич, А.К.Ганулич - М.: ВВИА, 1972. - С.194-196).
В современных комплексных системах для измерения координат объектов часто используется телевизионное следящее устройство корреляционного типа.
Известно телевизионное следящее устройство корреляционного типа, взятое в качестве прототипа, содержащее телевизионную камеру, видеоконтрольное устройство, коррелятор, пороговое устройство, коммутатор, устройство электронное, гиростабилизатор, вычислительное устройство. На вход оптической системы телевизионной камеры поступает оптический сигнал, выход телевизионной камеры соединен с входом видеоконтрольного устройства и входом коррелятора, выход коррелятора соединен с входом порогового устройства и первым входом коммутатора, выход порогового устройства соединен со вторым входом коммутатора, выход коммутатора соединен с входом устройства электронного, выход устройства электронного соединен с входом гиростабилизатора, выход гиростабилизатора является выходом телевизионного следящего устройства и соединен с входом вычислительного устройства и вторым входом телевизионной камеры, выход вычислительного устройства соединен с третьим входом коммутатора.
Оптическая система телевизионной камеры обеспечивает прием оптического сигнала от наблюдаемого объекта. В телевизионной камере этот сигнал преобразуется в электрический сигнал и поступает на видеоконтрольное устройство. Одновременно этот же сигнал поступает на коррелятор, который регистрирует направление и величину сдвига текущего изображения района объекта относительно его опорного изображения. Если величина смещения не превосходит порогового значения, то управление положением линии визирования телевизионной камеры осуществляется от вычислительного устройства системы счисления по измеренным параметрам движения носителя через коммутирующее устройство, устройство электронное и гиростабилизатор. Гиростабилизатор обеспечивает угловую пространственную стабилизацию линии визирования. Одновременно выходная информация с гиростабилизатора поступает в вычислительное устройство для обеспечения коррекции счисленных координат. В случае, когда величина смещения превышает пороговое значение, пороговое устройство вырабатывает сигнал управления, который поступает на коммутатор и подключает сигнал с коррелятора для коррекции положения линии визирования устройства и списывания ошибок счисления в вычислительном устройстве (Катыс Г.П. Восприятие и анализ оптической информации автоматической системы. / Г.П.Катыс - М.: Машиностроение, 1986. - С.135-148).
Недостатком этой системы является то, что если происходит сбой в работе коррелятора, то пороговое устройство воспринимает эту ситуацию как возникшую ошибку слежения и отключает связь с вычислительным устройством, тем самым прерывая процесс непрерывного слежения за объектом.
Техническим результатом изобретения является обеспечение бессрывного сопровождения объекта при возникновении внезапных сбоев в корреляторе за счет идентификации срыва слежения коррелятором и автоматической передачи в данной ситуации приоритета системы счисления координат.
Сущность изобретения состоит в том, что в устройство, содержащее телевизионную камеру, видеоконтрольное устройство, коррелятор, пороговое устройство, коммутатор, устройство электронное, гиростабилизатор, вычислительное устройство; причем на вход оптической системы телевизионной камеры поступает оптический сигнал, выход телевизионной камеры соединен с входом видеоконтрольного устройства и входом коррелятора, выход коррелятора соединен с входом порогового устройства и первым входом коммутатора, выход порогового устройства соединен со вторым входом коммутатора, выход коммутатора соединен с входом устройства электронного, выход устройства электронного соединен с входом гиростабилизатора, выход гиростабилизатора является выходом телевизионного следящего устройства и соединен с входом вычислительного устройства и вторым входом телевизионной камеры, выход вычислительного устройства соединен с третьим входом коммутатора; дополнительно введены анализатор срыва процесса сопровождения и второй коммутатор, причем выход вычислительного устройства соединен с входом анализатора срыва, первый выход анализатора срыва соединен со вторым входом вычислительного устройства, а второй выход блока анализатора срыва соединен с входом второго коммутатора, первый выход второго коммутатора соединен с третьим входом первого коммутатора, а второй выход второго коммутатора соединен со вторым входом устройства электронного.
На чертеже представлена структурная схема предлагаемого телевизионного следящего устройства корреляционного типа, схема содержит: 1 - телевизионную камеру; 2 - видеоконтрольное устройство; 3 - коррелятор; 4 - пороговое устройство; 5 - вычислительное устройство; 6 - первый коммутатор; 7 - устройство электронное; 8 - гиростабилизатор; 9 - анализатор срыва; 10 - второй коммутатор; Y - видеосигнал; Y* -измеренные угловые координаты объекта.
Принцип действия предлагаемого телевизионного следящего устройства корреляционного типа состоит в следующем.
С помощью оптической системы телевизионной камеры обеспечивается прием оптического сигнала от наблюдаемого объекта. В телевизионной камере 1 этот сигнал преобразуется в электрический сигнал и поступает на видеоконтрольное устройство 2. Одновременно этот же сигнал поступает на коррелятор 3, который регистрирует направление и величину сдвига текущего изображения района объекта относительно его опорного изображения. Если величина смещения не превосходит порогового значения, то управление положением линии визирования телевизионной камеры осуществляется от вычислительного устройства 5 системы счисления по измеренным параметрам движения носителя через первое коммутирующее устройство 6, устройство электронное 7 и гиростабилизатор 8. Гиростабилизатор обеспечивает угловую пространственную стабилизацию линии визирования. Одновременно выходная информация с гиростабилизатора поступает в вычислительное устройство для обеспечения коррекции счисленных координат. В случае, когда величина смещения превышает предельное значение, пороговое устройство 4 вырабатывает сигнал управления, который поступает на первый коммутатор 6 и подключает сигнал с коррелятора 3 для коррекции положения линии визирования телевизионной камеры 1 и списывает ошибки счисления в вычислительном устройстве. При возникновении сбоя в корреляторе 3 анализатор срыва процесса сопровождения 9 вырабатывает управляющий сигнал на второй коммутатор 10, который обеспечивает принудительное подключение к первому коммутатору 6 и устройству электронному 7 информации о счисляемых координатах объекта от вычислительного устройства 5, отключив при этом коррелятор 3.
Анализатор срыва процесса сопровождения построен на базе оптимального фильтра, адаптивного к сбоям автоматической системы. При этом индикатор срыва слежения целесообразно строить на основе анализа невязок в уравнениях фильтра (Справочник по теории автоматического управления. / Под редакцией Красовского А.А. - М.: Наука, 1987. - С.191-195; Симбаев А.Н. Фильтр, защищенный по отношению к отказам отдельных датчиков информационной подсистемы. Материалы межреспубликанской конференции. - Тамбов: ТВВАИУ, 1993. - С.349-350).
В случае необходимости оператор вручную обеспечивает коррекцию положения линии визирования. Для продолжения автоматического слежения за объектом необходимо повторно включить коррелятор.
Дополнение известного телевизионного следящего устройства корреляционного типа анализатором срыва процесса сопровождения и дополнительным коммутатором позволяет без существенных изменений системы обеспечить бессрывное сопровождение объекта при возникновении внезапных сбоев в корреляторе за счет идентификации срыва слежения коррелятором и автоматической передачи в данной ситуации приоритета системы счисления координат. Это позволяет существенно расширить область применения автоматических следящих систем.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПАССИВНАЯ ГОЛОВКА САМОНАВЕДЕНИЯ | 2017 |
|
RU2655516C1 |
| ПАССИВНАЯ ГОЛОВКА САМОНАВЕДЕНИЯ | 2020 |
|
RU2761915C1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА УПРАВЛЕНИЯ | 2000 |
|
RU2172010C1 |
| СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2388010C1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СЛЕДЯЩАЯ СИСТЕМА | 2000 |
|
RU2168753C1 |
| СЛЕДЯЩАЯ ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА | 2001 |
|
RU2211462C2 |
| СИСТЕМА СОПРОВОЖДЕНИЯ | 2000 |
|
RU2197002C2 |
| ИНТЕГРИРОВАННАЯ ЛОКАЦИОННО-ОПТИЧЕСКАЯ АВТОМАТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2321020C1 |
| Телевизионный координатор | 1983 |
|
SU1109956A1 |
| СЛЕДЯЩАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2381524C1 |
Изобретение относится к вычислительной технике и может быть использовано для алгоритмического диагностирования и компенсации срыва процесса автоматического сопровождения объекта телевизионным следящим устройством корреляционного типа. Технический результат заключается в обеспечении бессрывного сопровождения объекта при возникновении внезапных сбоев в корреляторе за счет идентификации срыва слежения коррелятором и автоматической передачи в данной ситуации приоритета системы счисления координат. Для этого известное телевизионное следящее устройство корреляционного типа дополнено анализатором срыва процесса сопровождения и дополнительным коммутатором. 1 ил.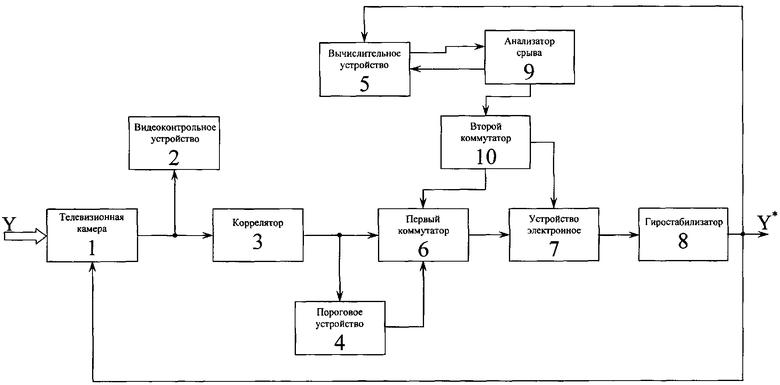
Телевизионное следящее устройство корреляционного типа, содержащее телевизионную камеру, видеоконтрольное устройство, коррелятор, пороговое устройство, первый коммутатор, устройство электронное, гиростабилизатор, вычислительное устройство, на вход оптической системы телевизионной камеры поступает оптический сигнал, выход телевизионной камеры соединен с входом видеоконтрольного устройства и входом коррелятора, выход коррелятора соединен с входом порогового устройства и первым входом коммутатора, выход порогового устройства соединен со вторым входом коммутатора, выход коммутатора соединен с первым входом устройства электронного, выход устройства электронного соединен с входом гиростабилизатора, выход гиростабилизатора является выходом телевизионного следящего устройства и соединен с первым входом вычислительного устройства и вторым входом телевизионной камеры, выход вычислительного устройства соединен с третьим входом коммутатора, отличающееся тем, что вычислительное устройство предназначено для обеспечения коррекции счисленных координат, а устройство электронное обеспечивает подключение информации о счисляемых координатах, дополнительно введены анализатор срыва процесса сопровождения и второй коммутатор, причем выход вычислительного устройства соединен с входом анализатора срыва, первый выход анализатора срыва соединен со вторым входом вычислительного устройства, а второй выход блока анализатора срыва соединен с входом второго коммутатора, первый выход второго коммутатора соединен с третьим входом первого коммутатора, а второй выход второго коммутатора соединен со вторым входом устройства электронного.
| RU 94010956 А1, 27.12.1995 | |||
| ОПТИКО-ЭЛЕКТРОННАЯ СЛЕДЯЩАЯ СИСТЕМА | 2000 |
|
RU2168753C1 |
| СПОСОБ СЕЛЕКЦИИ НАЗЕМНЫХ И ВОЗДУШНЫХ ОБЪЕКТОВ (ЕГО ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ЕГО ВАРИАНТЫ) | 1999 |
|
RU2173881C2 |
| СПОСОБ СЛЕЖЕНИЯ ЗА ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2153235C2 |
| US 4220967 А, 02.09.1980. | |||

