Изобретение относится к робототехнике, в частности, к системам управления манипуляторами, расположенными на мобильных роботах (MP) и может быть использовано при дистанционном управлении мобильными роботами для выполнения работ в полуавтоматическом режиме в экстремальных условиях.
Известен способ контроля точности контурных перемещений промышленных роботов (патент №2466858, кл. B25J 19/00, бюл. №32, 2012), включающий закрепление на фланце манипулятора калибровочного инструмента с наконечником в виде сферы, координаты центра которой совмещают с координатами характеристической точки рабочего органа манипулятора, вносят в регистрирующую аппаратуру допустимые значения величины погрешности позиционирования манипулятора, подводят манипулятором сферу калибровочного инструмента в точку измерительного контроля, определяют и запоминают начальные координаты центра сферы калибровочного инструмента в этой точке, производят изменение ориентации калибровочного инструмента в пространстве на максимально возможные углы, обусловленные кинематической схемой манипулятора, определяют и регистрируют отклонения координат центра сферы калибровочного инструмента от начальных значений, сравнивают эти отклонения с допустимыми значениями погрешности позиционирования манипулятора, по которым судят о точности контурных перемещений манипулятора, определяют отклонение координат центра сферы калибровочного инструмента с помощью оптической измерительной системы, выполненной с возможностью цифровой обработки видеоинформации, при этом формируют изображение сферы калибровочного инструмента в приемнике изображения, создают в нем двухмерную шкалу в виде 4 виртуальных меток, жестко фиксируемых в начальный такт измерения на поверхности приемника изображения в 4 точках изображения сферы калибровочного инструмента, получаемых пересечением окружности изображения сферы и 2 перпендикулярных прямых, проходящих через центр изображения сферы и совпадающих с координатными осями присоединенной к сфере декартовой системы координат, запоминают их положение в системе координат видеокамеры, в последующие такты измеряют по изображению значения расстояний от виртуальных меток, спроецированных на оси присоединенной к изображению переместившейся сферы системы координат, до соответственно дальних изображений точек пересечения окружности изображения переместившейся сферы с соответствующими координатными осями присоединенной системы координат и значения соответствующих координатных осей определяют по формулам

где d - известный диаметр сферы калибровочного инструмента; F1x, F2x, F1y, F2y - значения расстояний от проекций соответствующих виртуальных меток на координатные оси присоединенной к изображению перемещающейся сферы системы координат до изображений точек пересечения поверхности переместившейся сферы с соответствующими координатными осями присоединенной системы координат на противолежащих меткам поверхностях контролируемой сферы, причем измерительный контроль осуществляют в более чем одной точке, которые располагают в разных секторах рабочей зоны манипулятора, обусловленной его кинематической схемой.
Недостаток известного способа в том, что его нельзя использовать, когда информацию об объектах работ манипулятор получает не от системы технического зрения (СТЗ), которая одновременно может осуществлять контроль точности пространственных перемещений манипулятора и установлена на том же основании, что и манипулятор, а от СТЗ, расположенной на другом MP, произвольно перемещающемся в пространстве вблизи объектов работ.
Известен также способ управления манипулятором (патент №2685831, кл. B25J 9/00, бюл. №12, опубл. 23.04.2019), закрепленным на основании мобильного робота с первой системой технического зрения и калибровочным инструментом с использованием второго мобильного робота со второй системой технического зрения, заключающийся в том, что координаты упомянутого калибровочного инструмента сравнивают с координатами характерной точки рабочего органа манипулятора после перемещения рабочего органа к калибровочному инструменту и с помощью первой системы технического зрения, оснащенной системой цифровой обработки видеоинформации, регистрируют отклонение калибровочного инструмента от характерной точки рабочего органа манипулятора в первой системе координат, жестко связанной с основанием первого мобильного робота, в которой работает манипулятор, с введенной второй системой технического зрения, оснащенной системой цифровой обработки видеоинформации, которую устанавливают на основании второго мобильного робота, способного произвольно перемещаться в пространстве отдельно от первого мобильного робота таким образом, чтобы его вторая система технического зрения могла видеть объект манипулирования, который не доступен для наблюдения первой системой технического зрения и доступен для манипулятора, и одновременно калибровочный инструмент, после определения с помощью второй системы технического зрения расположения объекта манипулирования, и калибровочного инструмента во второй системе координат, жестко связанной с основанием второго мобильного робота, с помощью его второй навигационной системы передают полученные и взаимосвязанные между собой в пространстве координаты объекта манипулирования, и калибровочного инструмента из второй связанной системы координат второго мобильного робота в абсолютную систему координат, а из нее с помощью первой навигационной системы первого мобильного робота - в его первую связанную систему координат, затем на основе информации о координатах пространственного расположения калибровочного инструмента в первой связанной системе координат, полученных первой навигационной системой, перемещают рабочий орган манипулятора в точку с этими координатами, после определения системой цифровой обработки видеоинформации первой системы технического зрения пространственного отклонения характерной точки рабочего органа манипулятора от калибровочного инструмента определяют погрешность передачи навигационной информации о расположении калибровочного инструмента из второй в первую связанную систему координат, которая совпадает с погрешностью передачи навигационной информации о расположении объекта манипулирования, при этом в первой связанной системе координат устраняют выявленную погрешность в расположении указанного объекта в первой связанной системе координат путем пересчета его координат в первой связанной системе координат с учетом выявленного пространственного отклонения характерной точки рабочего органа манипулятора от калибровочного инструмента. Выше описанный способ по своей сущности является наиболее близким к заявляемому техническому решению и принят за прототип.
Однако в автоматическом режиме возможно выполнение только заранее известных операций с известными объектами, которые легко поддаются формализации и программированию. Но указанный способ не позволяет управлять манипулятором, закрепленным на MP, при необходимости работы с нестандартными объектами, а также при выполнении монтажно-сборочных, ремонтных, аварийно-спасательных и других работ, связанных с необходимостью взаимодействия с другими сложными неизвестными объектами. Для выполнения таких работ необходимо обеспечить дистанционное полуавтоматическое управление манипулятором с помощью оператора, который может и не видеть объекта работ из-за сложной рабочей обстановки с помощью СТЗ, установленной на MP с манипулятором.
Кроме этого, недостатками указанного способа являются использование калибровочного инструмента и необходимость выполнения пробных движений рабочего органа манипулятора, что приводит к значительному снижению производительности, а также невозможности учета текущей пространственной ориентации оснований обоих MP на сложном рельефе местности, который не является горизонтальной плоскостью.
Задачей заявляемого технического решения является устранение недостатков прототипа, в частности, обеспечение комфортного, быстрого и точного управления манипулятором, закрепленным на MP, при возникновении сложных работ оператором в полуавтоматическом режиме на пересеченной (неровной) местности, когда информацию об объектах работ и рабочем пространстве манипулятора оператор получает от СТЗ, которая установлена на другом MP, находящемся в другом (произвольном) месте, удобном для осмотра рабочего пространства манипулятора с объектами работ. Это особенно важно при выполнении операций, когда доступ к объектам работ ограничен, а сама зона работ сильно пересечена.
Технический результат, получаемый при решении поставленной задачи, заключается в автоматическом пересчете сигналов управления степенями подвижности установленного на одном MP манипулятора, которые формируются оператором с помощью задающего устройства (ЗУ) на основе видеоинформации, передаваемой ему СТЗ, установленной на другом MP, расположенном в любом месте зоны работ. При указанном пересчете учитываются реальные положения и ориентации двух MP на неровной поверхности, которые определяются их навигационными системами, оснащенными гироскопами. При этом не требуется использование калибровочного инструмента и выполнения пробные движения, т.к. все движения манипулятора отображаются на экране монитора и могут быть быстро скорректированы оператором самостоятельно.
Поставленная задача решается тем, что в рассматриваемом способе управления манипулятором, оснащенным рабочим органом и закрепленным, как и первая система технического зрения, способная изменять в пространстве ориентацию своей оптической оси, на основании первого мобильного робота, с которым жестко связана первая система координат, содержит второй мобильный робот, с которым жестко связана вторая система координат и шарнирно - вторая система технического зрения, способная также изменять ориентацию своей оптической оси в пространстве, и который может произвольно перемещаться по произвольной поверхности отдельно от первого мобильного робота таким образом, чтобы вторая система технического зрения могла одновременно видеть рабочий орган и объект, который недоступен для наблюдения первой системой технического зрения и с которым манипулятор должен выполнять рабочие операции, вводят задающее устройство, с помощью которого оператор в полуавтоматическом режиме формирует управляющие воздействия для перемещения рабочего органа в пространстве, и монитор, на который передается изображение объекта и рабочего органа от второй системы технического зрения, кроме того, на основании первого мобильного робота устанавливают первую навигационную систему, а на основании второго мобильного робота - вторую навигационную систему, которые оснащают гироскопами, измеряющими ориентации оснований, соответственно, первого и второго мобильных роботов в абсолютной системе координат, при этом оператор с помощью задающего устройства формирует желаемые координаты рабочего органа в третьей системе координат, жестко связанной с основанием задающего устройства, которые передают из третьей системы координат во вторую систему координат с учетом текущей ориентации оптической оси второй системы технического зрения во второй системе координат, затем с учетом показаний второй навигационной системы желаемые координаты рабочего органа передают из второй системы координат в абсолютную систему координат, а из нее с учетом показаний первой навигационной системы - в первую систему координат, при этом третья система координат, с которой связан монитор и в которой работает оператор, воспринимается им совпадающей с четвертой системой координат, жестко связанной со второй системой технического зрения.
Сопоставительный анализ существенных признаков заявляемого способа с существенными признаками аналогов и прототипа свидетельствует о его соответствии критерию "новизна".
При этом отличительные признаки формулы изобретения решают следующие функциональные задачи.
Признак «… вводят задающее устройство, с помощью которого оператор в полуавтоматическом режиме формирует управляющие воздействия для перемещения рабочего органа в пространстве, и монитор, на который передается изображение объекта и рабочего органа от второй системы технического зрения …» позволяет оператору в полуавтоматическом режиме дистанционно управлять манипулятором первого MP по его изображению на экране монитора от СТЗ, установленной на втором MP. При этом кинематическая схема ЗУ может отличаться от кинематической схемы манипулятора, но должна обеспечивать все его требуемые движения.
Признак «… на основании первого мобильного робота устанавливают первую навигационную систему, а на основании второго мобильного робота - вторую навигационную систему, которые оснащают гироскопами, измеряющими ориентации оснований, соответственно, первого и второго мобильных роботов в абсолютной системе координат …» при использовании двух указанных гироскопов в процессе передачи координат рабочего органа из второй в первую систему координат обеспечивает полный учет пространственных ориентаций оснований обоих MP по углам крена, тангажа и рыскания в абсолютной СК, что позволяет расширить область использования MP для выполнения работ в условиях сильно пересеченной местности.
Признак «… при этом оператор с помощью задающего устройства формирует желаемые координаты рабочего органа в третьей системе координат, жестко связанной с основанием задающего устройства, которые передают из третьей системы координат во вторую систему координат с учетом текущей ориентации оптической оси второй системы технического зрения во второй системе координат, затем с учетом показаний второй навигационной системы желаемые координаты рабочего органа передают из второй системы координат в абсолютную систему координат, а из нее с учетом показаний первой навигационной системы - в первую систему координат …» обеспечивает точное перемещение рабочего органа в заданное положение или по желаемым траекториям с необходимой ориентацией рабочего органа в пространстве, задаваемое оператором с помощью задающего устройства, с учетом текущих ориентаций оснований обоих MP и СТЗ. Этот способ одновременно обеспечивает и упрощение конструкции MP ввиду исключения калибровочного инструмента, предназначенного для выполнения тестовых движений.
Признак «… при этом третья система координат, с которой связан монитор и в которой работает оператор, воспринимается им совпадающей с четвертой системой координат, жестко связанной со второй системой технического зрения» обеспечивает восприятие оператором перемещений рабочего органа манипулятора на экране монитора как перемещение в третьей системе координат, жестко связанной с основанием ЗУ, что снижает психологическую нагрузку на оператора, а также повышает производительность его работы и точность выполнения ответственных операций.
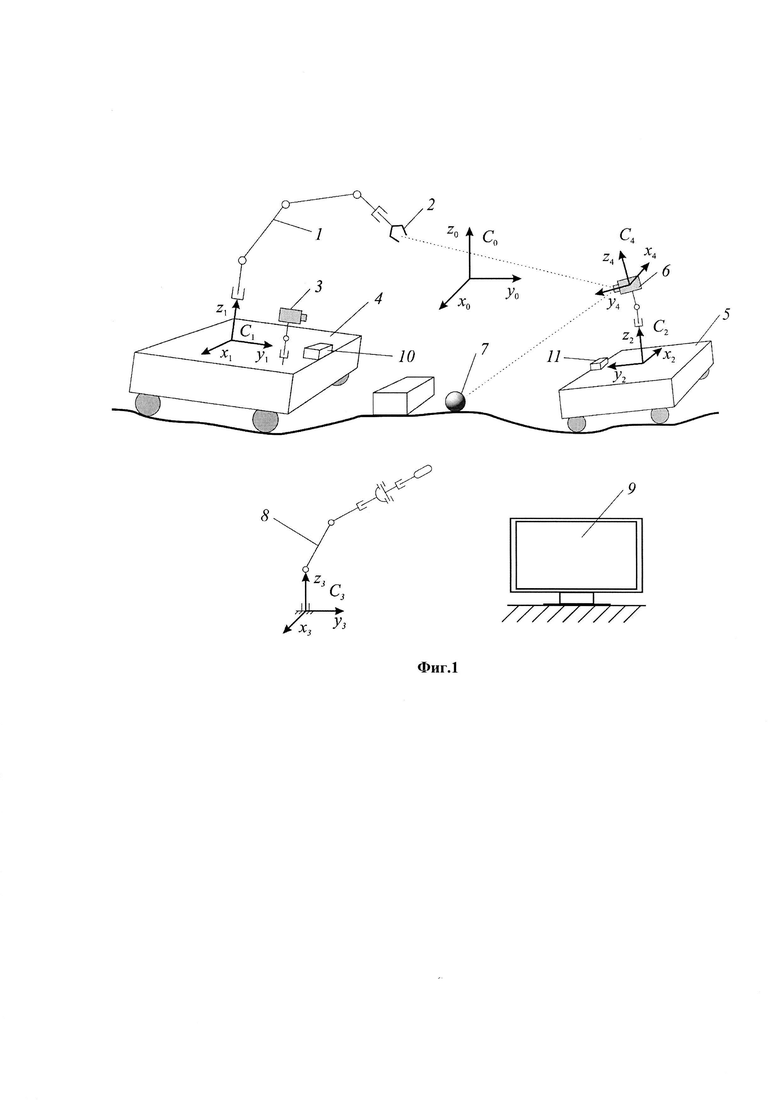
Сущность заявляемого технического решения поясняется чертежом, где на Фиг. 1 показана схема, реализующая предлагаемый способ полуавтоматического управления манипулятором, расположенным на одном MP, когда информация об объекте работ на экране оператора поступает от СТЗ, расположенной на другом MP.
На схеме введены следующие обозначения: 1 - манипулятор; 2 - рабочий орган манипулятора; 3 - первая СТЗ; 4 - первый MP; 5 - второй MP; 6 - вторая СТЗ; 7 - объект; 8 -задающее устройство; 9 - монитор оператора; 10 - первая и вторая навигационные системы с гироскопами; 11; С0 - абсолютная система координат (АСК); С1 и С2 - первая и вторая СК, жестко связанные, соответственно, с основаниями первого и второго MP; С3 и С4 - третья и четвертая СК, жестко связанные, соответственно, с задающим устройством 8 и со второй СТЗ 6.
Заявленный способ реализуется следующим образом.
В процессе работы первого MP 4, оснащенного манипулятором 1 с рабочим органом 2 и СТЗ 3, на неровной поверхности возникают ситуации, когда СТЗ 3 не видит объект 7 работ (Фиг. 1). В этом случае для наблюдения за объектом 7 используют более маневренный и, возможно, меньший по габаритам второй MP 5, оснащаемый СТЗ 6. Второй MP 5 подходит к объекту 7 с удобного ракурса так, чтобы оператор на экране монитора 9 одновременно видел этот объект и рабочий орган 2 манипулятора 1.
Оператор задает ориентацию и перемещение рабочего органа 2 с помощью ЗУ 8, ориентируясь по изображению этого рабочего органа на экране монитора 9. Для удобства оператора кинематическая схема ЗУ 8 может отличаться от кинематической схемы манипулятора 1, но она должна обеспечивать все необходимые движения этого манипулятора. Во время работы оператор задает текущее положение и ориентацию ЗУ 8. Для формирования всех координат расположения рабочего органа 2 манипулятора 1 в СК С1 все координаты расположения рукоятки ЗУ из СК С3 вначале переводятся в СК С2, а из нее с помощью второй навигационной системы 11 - в АСК С0, и, наконец, с помощью первой навигационной системы 10 - в СК С1.
Для снижения психологической нагрузки на оператора, наблюдающего за движением рабочего органа 2 на экране монитора 9, СК С3 и СК С4 совмещают. В результате реальное движение рукоятки ЗУ и движение изображения рабочего органа 2, наблюдаемое на экране монитора, воспринимаются оператором как движения в СК С3. При этом автоматически учитываются текущие расположения обоих MP в АСК С0, а также текущая ориентация СТЗ 6 второго MP в СК С2.
Техническая реализация предложенного способа управления манипулятором, установленным на MP, не вызывает принципиальных затруднений, так как в нем используются только типовые технические элементы и устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ | 2021 |
|
RU2761923C1 |
| Способ управления манипулятором | 2017 |
|
RU2685831C1 |
| Способ точного управления подводным манипулятором с помощью откалиброванной бинокулярной системы технического зрения | 2023 |
|
RU2804597C1 |
| СПОСОБ ВНЕШНЕЙ КАЛИБРОВКИ БИНОКУЛЯРНОЙ СИСТЕМЫ ТЕХНИЧЕСКОГО ЗРЕНИЯ | 2022 |
|
RU2785952C1 |
| Способ управления многозвенным манипулятором необитаемого подводного аппарата для выполнения манипуляционных операций с подводными объектами | 2022 |
|
RU2781926C1 |
| Способ адаптивного управления манипулятором подводного аппарата | 2023 |
|
RU2826888C1 |
| Способ позиционно-силового управления автономным необитаемым подводным аппаратом с многостепенным манипулятором | 2023 |
|
RU2799176C1 |
| СПОСОБ УПРАВЛЕНИЯ МНОГОСТЕПЕННЫМ МАНИПУЛЯТОРОМ | 2021 |
|
RU2785144C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ ДОПОЛНЕННОЙ РЕАЛЬНОСТИ И РОБОТОТЕХНИЧЕСКАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2713570C1 |
| МОБИЛЬНАЯ АВТОНОМНАЯ РОБОТОТЕХНИЧЕСКАЯ ПЛАТФОРМА С БЛОЧНОЙ ИЗМЕНЯЕМОЙ СТРУКТУРОЙ | 2019 |
|
RU2704048C1 |
Изобретение относится к робототехнике, в частности к системам управления манипуляторами, расположенными на мобильных роботах (MP), и может быть использовано при дистанционном управлении мобильными роботами для выполнения работ в полуавтоматическом режиме в экстремальных условиях. Предложенный способ обеспечивает комфортное, быстрое и точное управление манипулятором, закрепленным на MP, при возникновении сложных работ, оператором в полуавтоматическом режиме на пересеченной, в том числе неровной, местности, когда информацию об объектах работ и рабочем пространстве манипулятора оператор получает от системы технического зрения (СТЗ), которая установлена на другом MP, находящемся в любом произвольном месте, удобном для осмотра рабочего пространства манипулятора с объектами работ. При расчете сигналов управления учитываются реальные положения и ориентации двух MP на неровной поверхности, которые определяются их навигационными системами, оснащенными гироскопами. При этом не требуется использования калибровочного инструмента и выполнения пробных движений, т.к. все движения манипулятора отображаются на экране монитора и могут быть быстро скорректированы оператором самостоятельно. Технический результат заключается в автоматическом пересчете сигналов управления степенями подвижности установленного на одном MP манипулятора, которые формируются оператором с помощью задающего устройства (ЗУ) на основе видеоинформации, передаваемой ему СТЗ, установленной на другом MP, расположенном в любом месте зоны работ. 1 ил.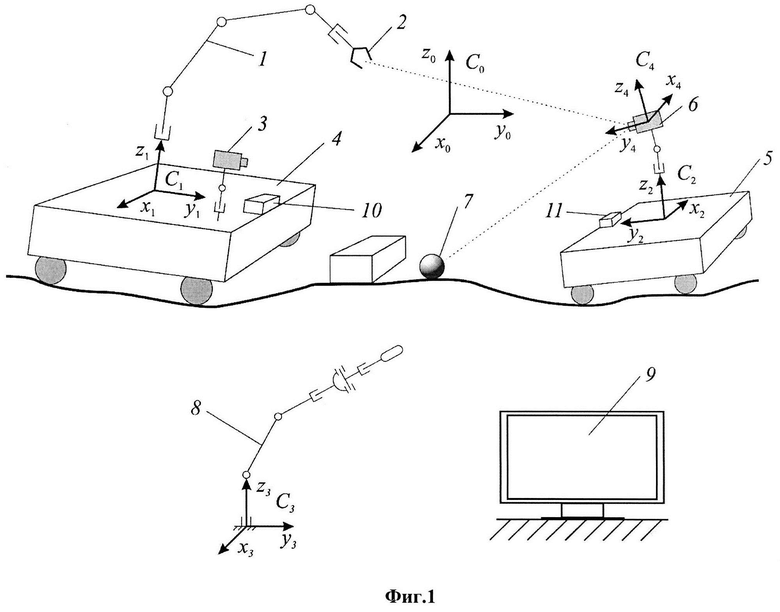
Способ управления манипулятором, оснащенным рабочим органом и закрепленным, как и первая система технического зрения, способная изменять в пространстве ориентацию своей оптической оси, на основании первого мобильного робота, с которым жестко связана первая система координат, содержит второй мобильный робот, с которым жестко связана вторая система координат и шарнирно - вторая система технического зрения, способная также изменять ориентацию своей оптической оси в пространстве, и который может произвольно перемещаться по произвольной поверхности отдельно от первого мобильного робота таким образом, чтобы вторая система технического зрения могла одновременно видеть рабочий орган и объект, который недоступен для наблюдения первой системой технического зрения и с которым манипулятор должен выполнять рабочие операции, отличающийся тем, что вводят задающее устройство, с помощью которого оператор в полуавтоматическом режиме формирует управляющие воздействия для перемещения рабочего органа в пространстве, и монитор, на который передается изображение объекта и рабочего органа от второй системы технического зрения, кроме того, на основании первого мобильного робота устанавливают первую навигационную систему, а на основании второго мобильного робота - вторую навигационную систему, которые оснащают гироскопами, измеряющими ориентации оснований, соответственно, первого и второго мобильных роботов в абсолютной системе координат, при этом оператор с помощью задающего устройства формирует желаемые координаты рабочего органа в третьей системе координат, жестко связанной с основанием задающего устройства, которые передают из третьей системы координат во вторую систему координат с учетом текущей ориентации оптической оси второй системы технического зрения во второй системе координат, затем с учетом показаний второй навигационной системы желаемые координаты рабочего органа передают из второй системы координат в абсолютную систему координат, а из нее с учетом показаний первой навигационной системы - в первую систему координат, при этом третья система координат, с которой связан монитор и в которой работает оператор, воспринимается им совпадающей с четвертой системой координат, жестко связанной со второй системой технического зрения.
| Способ управления манипулятором | 2017 |
|
RU2685831C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ТРЕХМЕРНЫМИ ОБЪЕКТАМИ В ВИРТУАЛЬНОМ ПРОСТРАНСТВЕ | 2018 |
|
RU2695053C1 |
| СПОСОБ КОНТРОЛЯ ТОЧНОСТИ КОНТУРНЫХ ПЕРЕМЕЩЕНИЙ ПРОМЫШЛЕННЫХ РОБОТОВ | 2011 |
|
RU2466858C1 |
| CN 110103217 A, 09.08.2019 | |||
| CN 102419178 A, 18.04.2012 | |||
| US 8428781 B2, 23.04.2013 | |||
| US 20200016748 A1, 16.01.2020. | |||

