Изобретение относится к радиолокационной технике и может быть применено в автомобильной индустрии.
Известны радиолокационные датчики, предназначенные для отображения информации об окружающей автомобиль обстановке.
Анализ радиолокационных датчиков (РЛ) в диапазоне 76-81 ГГц показал, что на рынке присутствуют датчики, как с электронным сканированием пространства, так и с механическим. Изготовление РЛ датчика с электро-механическим сканированием (фирма Continental) сопряжено с проблемами связанными серийным изготовлением механических частей антенно-фидерного тракта, что в условиях развития технологий в Российской Федерации сопряжено с крупными финансовыми затратами на переоборудование производственных мощностей. Также, РЛ датчики с механическим сканированием вытесняются с рынка новейшими РЛ датчиками с электронным сканированием. Это связанно с развитием радиоэлектронной элементной базы, позволяющим получить сопоставимые с механическим сканированием точности по угловым координатам. Учитывая данные обстоятельства, предлагается концепция реализации РЛ датчика с электронным сканированием.
Известны радиолокационные датчики для предупреждения водителей о возможном столкновении автомобиля с препятствием в возникающей аварийной ситуации, для обеспечения безопасности движения автомобиля в транспортном потоке или же для повышения эффективности действия процесса торможения автомобиля, снабженного, например, антиблокировочной системой, и в других случаях, (см. патент РФ №2092869, МПК G01S 13/93 от 09.12.1992 г.). Особенностью описываемого устройства является то, что в нем используется один генератор радиочастоты, часть сигнала которого облучает земную поверхность боковым лепестком однолучевой антенны, тем самым оценивается путевая скорость автомобиля по частоте Доплера, а другая часть радиосигнала формируется в виде коротких импульсов и направляемых той же радиоантенной в переднюю сторону движения автомобиля. Вычислительное устройство оценивает текущую дальность, скорость сближения с препятствием и путевую скорость, выдавая сигнализацию в случае достижения критического состояния этих величин, при которых неизбежно опасное столкновение как с подвижным, так и неподвижным препятствием
Известен также автомобильный доплеровский радиолокационный датчик, который является ближайшим известным техническим решением, содержащий передающее устройство, приемное устройство и по меньшей мере один блок управления. Радиолокационная система установлена в транспортном средстве, имеющем переднее направление движения. Передающее устройство содержит генератор сигналов и передающее антенное устройство, предназначенное для передачи сигналов. Приемное устройство содержит приемник и приемное антенное устройство, выполненное с возможностью приема отраженных сигналов, (см. Патент ЕС № ЕР 3264131, МПК G01S 13/34, G01S 13/93, опубл. 03.01.2018 г.)
Радиолокационные сигналы могут быть, например, в форме сигналов FMCW (частотно-модулированных непрерывных волн). Радиолокационная система предназначена для установки в транспортном средстве, имеющем переднее направление движения. Передающее устройство содержит передающее антенное устройство, предназначенное для передачи сигналов, а приемное устройство содержит приемное антенное устройство, предназначенное для приема отраженных сигналов. Радиолокационная система устроена так, чтобы получать множество результатов измерений по полученным отраженным сигналам вдоль основного поля зрения в течение, по меньшей мере, двух радиолокационных циклов, где каждый радиолокационный цикл состоит из множества пилообразных сигналов FMCW. Для каждого радиолокационного цикла блок управления выполнен так, чтобы сформировать карту спектральной плотности из измерительных точек вдоль основного поля зрения, где каждый результат измерения приводит к измерительной точке.
Недостатком известных решений является отсутствие возможности определения угловых координат до целей.
Технической задачей предложенного радиолокационного датчика является увеличение точности определения угловых координат в условиях, когда визуальное наблюдение затруднено (а именно: при плотном тумане, интенсивном дожде или снегопаде, при ослеплении солнечными лучами или фарами встречных автомобилей), и повышение информативности при обнаружении объектов на дороге (позади и сбоку автомобиля), а также измерения координат (дальности, азимута (смещения), скорости) обнаруженных объектов; оценку габаритных размеров обнаруженных объектов; и классификацию обнаруженных объектов (ТС и пешеходов).
Для реализации поставленной задачи в радиолокационном датчике для предупреждения столкновений транспортного средства, содержащем передающий тракт, включающем генератор сигнала, соединенный через усилитель мощности, с передающей антенной, и приемный тракт, включающий приемную антенну, малошумящий усилитель, смеситель, входы которого соединены с усилителем, а выход с входом аналого-цифрового преобразователя, подключенного к устройству обработки, передающую и приемную антенны выполняют многоканальными в виде полосковых фазированных антенных решеток, фазовые центры передающих антенн сдвинуты относительно друг друга в азимутальной плоскости на (N-1)×λ/2, где N - количество приемных каналов, λ - длина волны, а фазовые центры приемных антенн сдвинуты относительно друг друга на λ/2, при этом приемный канал дополнен дополнительно двумя подканалами, один из трех подканалов приемного канала, причем первый и второй приемные подканалы служат для получения разностного сигнала по азимутальной плоскости, а первый и третий приемные подканалы образуют разностный канал по угломестной плоскости, дополнительные подканалы содержат малошумящий усилитель, смеситель, аналого-цифровой преобразователь, при этом выходы малошумящих усилителей каждого подканала соединены с первыми входами смесителей, вторые входы которых подключены к выходам гетеродина, выходы смесителей каждого подканала соединены с входами аналого-цифровых преобразователей, а выходы аналого-цифровых преобразователей подключены к устройству обработки отраженного сигнала и вычисления диаграмм направленности в угломестной и азимутальных плоскостях.
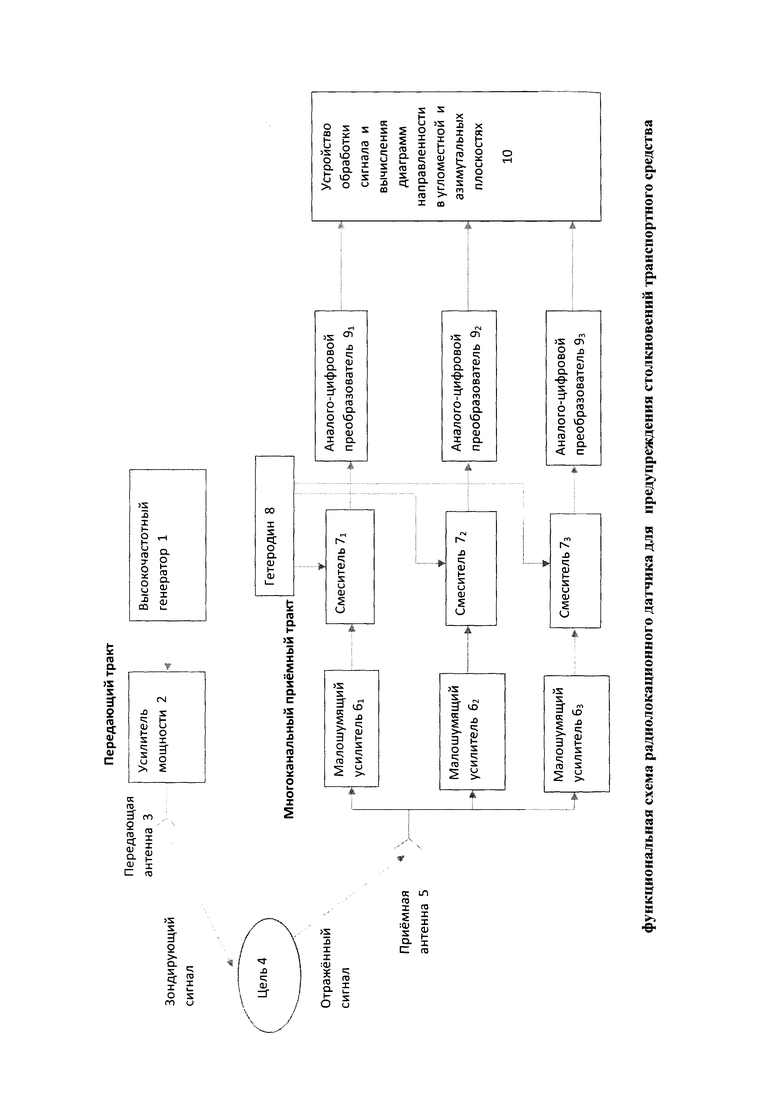
Изобретение поясняется чертежом, где отражена функциональная схема радиолокационного датчика для предупреждения столкновений транспортного средства.
Радиолокационный (РЛ) датчик для предупреждения столкновений транспортного средства содержит передающий тракт, который состоит из высокочастотного генератора 1, усилителя мощности 2, передающей полосковой фазированной антенной решетки 3, предмет исследования-цель 4, многоканальный приемный тракт, включающий приемную полосковую фазированную антенную решетку 5, три подканала, каждый из которых содержит малошумящие усилители 61, 62 и 63, смесители 71, 72 и 73„ управляемые гетеродином 8, аналогово-цифровые преобразователи 91, 92, 93, устройство обработки сигнала и вычисления диаграмм направленности в угломестной и азимутальных плоскостях 10.
Объект - цель 4 облучают радиочастотным излучением с помощью системы передающих антенн, фазовые центры которых, расположены на определенных расстояниях друг от друга.
В РЛ датчике с электронным сканированием используется новейшая технология синтезирования фазированной антенной решетки в азимутальной плоскости. Элементы РЛ датчика выполняются по микрополосковой технологии в виде фазированной решетки.
Сигнал, отраженный от цели 4, попадает на полосковую многоканальную фазированную антенную решетку 5, после чего направляется поканально на соответствующий малошумящий усилитель 61, 62, 63. После каждого из малошумящего усилителя, 61, 62, 63 отраженный сигнал передается на соответствующий смеситель 71, 72, 73, управляемыми гетеродином 8, с низкими потерями преобразования. С помощью управляемых смесителей 71, 72, и 73 сигнал преобразуется в промежуточную частоту. В свою очередь сигнал на промежуточной частоте попадает на аналого-цифровой преобразователь 81, 82, и 83, который преобразует его из аналогово в цифровой. После этого преобразованный сигнал поступает на последующее устройство обработки сигнала и вычисления диаграмм направленности в угломестной и азимутальных плоскостях 10.
Рассмотрим технологию синтезирования фазированной антенной решетки с электронными сканированием в азимутальной плоскости. Для получения фазированной решетки необходимо, чтобы фазовые центры передающих антенн были сдвинуты друг относительно друга в азимутальной плоскости на (N-1)×λ/2, где N - количество приемных каналов, λ - длина волны. Приемные антенны должны быть сдвинуты друг относительно друга на λ/2. Также все N приемных каналов должны когерентно оцифровываться по такту задающего генератора.
Объект облучают радиочастотным излучением с помощью системы передающих антенн, фазовые центры которых, расположены на некотором расстоянии друг от друга, принимают отраженные от объекта излучения, с помощью N приемных антенн, определении фазовых центров приемных каналов, в соответствии с фазовыми центрами передающих антенн и формировании амплитудно-фазового распределения антенной решетки, отличающийся тем, что фазовые центры передающих антенн разносят относительно друг друга в азимутальной плоскости, на ((N-1)×λ)/2, где N - количество приемных каналов, λ - длина волны, при этом, приемные антенны должны быть сдвинуты относительно друг друга на d=λ/2, отраженные сигналы когерентно оцифровывают, суммируют от одной позиции передающей антенны, формируют матрицу распределений антенной решетки по формуле

где Dm - функция направленности одной приемной антенны, Si - комплексные значения оцифрованных данных, d - расстояние между элементами приемной антенны, k - волновое число, N - число синтезированных подрешеток.
В устройстве обработки сигналов 10 происходит цифровое диаграммообразование и согласованная обработка сигнала. В результате формируется N приемных лучей. Каждому N приемных лучей соответствует свой суммарный и разностный канал.
Анализ показал, что амплитуда разностного сигнала на выходе антенны меняется в зависимости от направления отклонения цели относительно равносигнального направления. При отсутствии рассогласования, когда направление на цель совпадает с равносигнальным направлением антенной системы, отраженные от цели сигналы на входе приемных каналов имеют равные амплитуды. Вследствие этого разностный сигнал равен нулю.
Разностный канал непосредственно используется в процессе автоматического сопровождения цели. Первый и второй приемные каналы образуют разностный канал по азимутальной плоскости, первый и третий приемные каналы образуют разностный канал по угломестной плоскости.
Образующийся при приеме суммарный канал (все три приемных канала) используется не только в качестве опорного сигнала, но и для обнаружения цели, а также измерения дальности до цели и ее скорости.
После измерения дальности и скорости проводится расчет углового положения цели. Таким образом, обработка N приемных каналов позволяет увеличить точности определения угловых координат, особенно, в условиях, когда визуальное наблюдение затруднено.
Благодаря определению углового положения цели появляется возможность реализовать функции высокого уровня: адаптивный круиз-контроль, контроль слепых зон, автоматическое экстренное торможение.
| название | год | авторы | номер документа |
|---|---|---|---|
| Моноимпульсный пеленгатор с комбинированным антенным устройством | 2015 |
|
RU2624008C2 |
| СПОСОБ ОБУЖЕНИЯ ПРИЕМНОЙ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ И МНОГОФУНКЦИОНАЛЬНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ, РЕАЛИЗУЮЩАЯ ЭТОТ СПОСОБ | 2014 |
|
RU2599932C2 |
| Способ построения радиолокационного запросчика | 2019 |
|
RU2713621C1 |
| КОРОТКОИМПУЛЬСНЫЙ РАДИОЛОКАТОР С ЭЛЕКТРОННЫМ СКАНИРОВАНИЕМ В ДВУХ ПЛОСКОСТЯХ И С ВЫСОКОТОЧНЫМ ИЗМЕРЕНИЕМ КООРДИНАТ И СКОРОСТИ ОБЪЕКТОВ | 2014 |
|
RU2546999C1 |
| Способ обработки цифрового радиолокационного сигнала и радиолокатор обнаружения препятствий высокого разрешения | 2022 |
|
RU2792971C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С НЕПРЕРЫВНЫМ ИЗЛУЧЕНИЕМ ШИРОКОПОЛОСНОГО ЛИНЕЙНО-ЧАСТОТНО-МОДУЛИРОВАННОГО СИГНАЛА ПРИ ШИРОКОУГОЛЬНОМ ЭЛЕКТРОННОМ СКАНИРОВАНИИ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ | 2021 |
|
RU2774156C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С ИНВЕРСНЫМ СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ | 1997 |
|
RU2129286C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ КРУГОВОГО ОБЗОРА | 2012 |
|
RU2522982C2 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ВЕРТОЛЕТА | 2004 |
|
RU2256939C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С ИНВЕРСНЫМ СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ И МНОГОЧАСТОТНЫМ ЗОНДИРУЮЩИМ СИГНАЛОМ | 1999 |
|
RU2152626C1 |
Изобретение относится к радиолокационным системам предупреждения столкновений транспортного средства и предназначено для повышения безопасности движения транспортного средства. Техническим результатом изобретения является увеличение точности определения угловых координат цели в условиях, когда визуальное наблюдение затруднено, и повышение информативности при обнаружении объектов на дороге, измерении их координат, оценке габаритных размеров и классификации. Радиолокационный датчик для предупреждения столкновений транспортного средства содержит передающий тракт, включающий генератор сигнала, соединенный через усилитель мощности с передающей антенной, и многоканальный приемный тракт, состоящий из приемной антенны и трех подканалов. Каждый из подканалов включает малошумящий усилитель, смеситель, входы которого соединены с малошумящим усилителем и гетеродином, а выход - с входом аналого-цифрового преобразователя, подключенного к устройству обработки отраженного сигнала и вычисления диаграмм направленности в угломестной и азимутальных плоскостях. При этом передающая и приемная антенны выполнены многоканальными в виде полосковых фазированных антенных решеток. Фазовые центры передающих антенн сдвинуты относительно друг друга в азимутальной плоскости на (N-1)×λ/2, а фазовые центры приемных антенн – на λ/2, где N - количество приемных каналов, λ - длина волны. Первый и второй приемные каналы служат для получения разностного сигнала по азимутальной плоскости, а первый и третий приемные каналы образуют разностный канал по угломестной плоскости. 1 ил.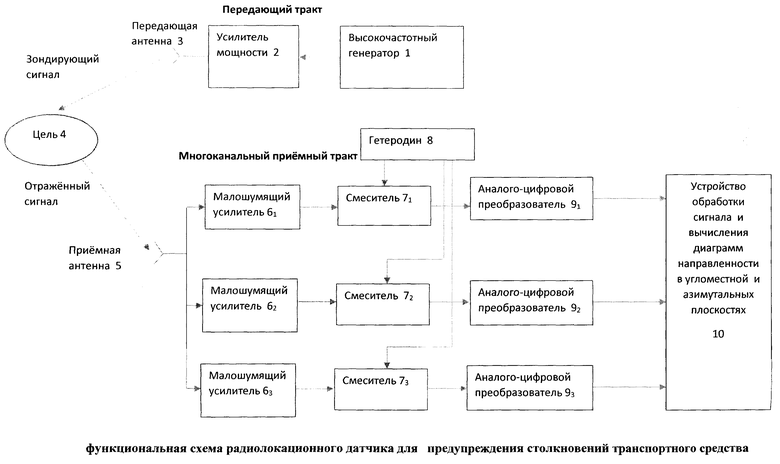
Радиолокационный датчик для предупреждения столкновений транспортного средства, содержащий передающий тракт, включающий генератор сигнала, соединенный через усилитель мощности с передающей антенной, и приемный тракт, включающий приемную антенну, малошумящий усилитель, смеситель, входы которого соединены с усилителем, а выход - с входом аналого-цифрового преобразователя, подключенного к устройству обработки, отличающийся тем, что передающая и приемная антенны выполнены многоканальными в виде полосковых фазированных антенных решеток, фазовые центры передающих антенн сдвинуты относительно друг друга в азимутальной плоскости на (N-1)×λ/2, где N - количество приемных каналов, λ - длина волны, а фазовые центры приемных антенн сдвинуты относительно друг друга на λ/2, при этом приемный канал дополнен дополнительно двумя подканалами, причем первый и второй приемные подканалы служат для получения разностного сигнала по азимутальной плоскости, а первый и третий приемные подканалы образуют разностный канал по угломестной плоскости, каждый из дополнительных подканалов содержит малошумящий усилитель, смеситель, аналого-цифровой преобразователь, при этом выход малошумящего усилителя каждого подканала соединен с первым входом смесителя, второй вход которого подключен к одному из выходов гетеродина, выходы смесителей каждого подканала соединены с входами аналого-цифровых преобразователей, а выходы аналого-цифровых преобразователей подключены к устройству обработки отраженного сигнала и вычисления диаграмм направленности в угломестной и азимутальных плоскостях.
| Способ и устройство предупреждения столкновений транспортного средства | 2019 |
|
RU2707970C1 |
| УСТРОЙСТВО для ИЗГОТОВЛЕНИЯ НА СТЕНДЕ | 0 |
|
SU178719A1 |
| РАДАР БЕЗОПАСНОСТИ ДВИЖЕНИЯ АВТОМОБИЛЬНОГО ТРАНСПОРТА | 1992 |
|
RU2092869C1 |
| АКТИВНАЯ АНТЕННАЯ РЕШЕТКА | 2003 |
|
RU2252469C2 |
| СИСТЕМА ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ ТРАНСПОРТНЫХ СРЕДСТВ В КОЛОННЕ | 2004 |
|
RU2292564C2 |
| 0 |
|
SU158143A1 | |
| CN 111522010 A, 11.8.2020 | |||
| EP 3264131 A1, 03.01.2018 | |||
| WO 2018197425 A1, 01.11.2018 | |||
| US 2020256973 A1, 13.08.2020 | |||
| CN 103913742 A, 09.07.2014. | |||

