ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к многофункциональному рабочему устройству. В частности, многофункциональное рабочее устройство в соответствии с настоящим изобретением может использоваться для деформации или волочения, выпрямления и, возможно, также для измерения металлической проволоки.
Многофункциональное рабочее устройство в соответствии с настоящим изобретением применяется, предпочтительно, но не исключительно, в комплексе с машинами или установками для производства профилированной металлической проволоки, например, скоб любого типа для строительной промышленности, линеарной проволоки и т.п.
Здесь и далее в описании и в формуле изобретения термин "проволока" включает пруток круглого сечения, сортовой прут квадратного или прямоугольного сечения или стержни для строительной промышленности с калибром или диаметром, например, от 3 мм до 25 мм или более, переменными в соответствии с габаритами устройства.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Известны многофункциональные рабочие устройства для деформации и выпрямления металлической проволоки, но они имеют рабочие и функциональные ограничения.
Известны также многофункциональные рабочие устройства, снабженные устройством волочения с функцией волочения проволоки и измерения длины движущейся проволоки.
Одним из примеров является рабочее устройство по заявке WO-A-2014/132207, в которой описывается устройство волочения и выпрямления, включающее приводной ролик и по крайней мере два противостоящих ролика, которые могут вхолостую вращаться вокруг своих осей вращения, установленных по периферии приводного ролика, чтобы определять зазор для прохождения проволоки, при этом диаметр приводного ролика больше диаметра противостоящих роликов.
Известны также рабочие устройства, в которых устройство волочения может также выполнять или выполняет функцию деформации металлической проволоки для ее выпрямления.
Как альтернатива, или вместе с тем, действие деформации выполняется по меньшей мере одним выпрямляющим устройством, обычно установленным перед устройством волочения и снабженным альтернативными и противостоящими роликами в соответствии с осью подачи проволоки, чтобы создавать одну или более выпрямительных петлей.
Известно также, что многофункциональные рабочие устройства могут быть выполнены с возможностью одновременно обрабатывать несколько металлических проводов, обычно два.
Одним из недостатков таких устройств является то, что, если необходимо отходить от конфигурации, в которой устройство обрабатывает два или более провода, к конфигурации обработки одного провода, или наоборот, необходимы изменения или модификации устройства, требующие вмешательства операторов с последующими потерями времени.
Следующим недостатком многофункциональных рабочих устройств является невозможность обработки проводов широких диапазонов калибров или типов.
Еще одним недостатком известных многофункциональных рабочих устройств является быстрый износ, которому подвержены, например, волочильные ролики.
Следующими недостатками являются обслуживание и запасные части, а также начальные проблемы сборки и тонкая настройка.
Недостатками известных технических решений являются также не всегда правильное измерение длины проволоки в процессе перемещения и/или неправильные выпрямление и линеаризация.
Вследствие таких обстоятельств заявитель поставил перед собой задачу исследования, испытания и изготовления очень универсального многофункционального рабочего устройства с возможностью использования не только в комплексе с высокотехнологичными машинами скобяного производства, но также с оборудованием обработки проволоки широкого диапазона калибров.
Другой целью является возможность работы с профилировочными или намоточными машинами.
Следующей целью является по меньшей мере снижение износа роликов или расхода материала, подлежащего линеаризации.
Еще одной целью настоящего изобретения является выполнение простого и компактного многофункционального рабочего устройства, которым удобно управлять и в котором удобно устанавливать компоненты относительно друг друга.
Целью настоящего изобретения является также выполнение многофункционального рабочего устройства, которое требует простой сборки, простого и удобного обслуживания.
Еще одной целью изобретения является создание многофункционального рабочего устройства, которое удобно использовать в соответствии с конечным результатом.
Следующей целью изобретения является выполнение многофункционального рабочего устройства, обеспечивающего максимальные скорости обработки.
Целью изобретения является также выполнение многофункционального рабочего устройства, пригодного для расширения рабочих возможностей оборудования, предназначенного для получения широкого диапазона продукции, такой как прямая проволока, скобы, спиральная проволока, профилированная проволока и т.п.
Заявитель разработал, испытал и осуществил настоящее изобретение, чтобы преодолеть недостатки известного уровня техники и обеспечить достижение этих и других целей и преимуществ.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение предлагается и характеризуется в независимых пунктах формулы изобретения, в то время как зависимые пункты формулы описывают другие признаки изобретения или варианты основных изобретательских замыслов.
В соответствии с указанными выше целями устройство волочения и деформации в соответствии с настоящим изобретением включает неприводной противостоящий ролик, вращаемый вокруг своей оси вращения, и по меньшей мере два приводных ролика, установленных по периферии противостоящего ролика, чтобы определять зазоры для прохождения проволоки. Диаметр противостоящего ролика больше диаметра приводных роликов.
Конструкция устройства волочения и деформации позволяет повышать воздействие волочения, которое устройство оказывает на обрабатываемое изделие, по сравнению с известным уровнем техники.
Настоящее изобретение относится также к многофункциональному рабочему устройству, включающему устройство волочения и деформации, описанное выше, и по меньшей мере одно направляющее устройство для проволоки и выпрямляющее устройство или отделочный узел.
Примеры осуществления настоящего изобретения относятся также к многофункциональному рабочему устройству, включающему по меньшей мере два из следующих приспособлений:
- устройство волочения и деформации, например, такого типа, который описан выше, пригодное для работы в соответствии с рабочим режимом, выборочно с одним проводом или с двумя проводами одновременно, подавая их в расположенное далее устройство и обеспечивая при этом необходимый эффект деформации;
- направляющее устройство для проволоки с роликами, выполненными с возможностью обеспечивать перемещение одного или двух проводов одновременно в многофункциональное рабочее устройство и позиционировать переднюю часть проводов в правильном положении подачи в последующее устройство;
- выпрямляющее устройство, называемое также устройством для предварительной деформации, расположенное перед устройством волочения и деформации и выполненное с возможностью обеспечивать по меньшей мере частичную деформацию одного или обоих металлических проводов и приготавливать их наилучшим способом для последующей деформации устройством волочения и деформации;
- отделочный узел с функцией обеспечения линейности выходящего провода.
Такая комбинация, даже при ее минимальной структуре, обеспечивает также решение многих технических проблем, придавая в то же время соответствующие преимущества:
- позволяет получать оборудование, которое является намного более полным и подходящим для обеспечения наилучшей линейности;
- обеспечивает упрощение монтажа, обслуживания и регулирования;
- гарантирует полную и исчерпывающую деформацию металлических проводов;
- обеспечивает получение стабильной линейности без значительного остаточного растяжения проводов;
- позволяет одновременно обрабатывать два провода, не делая различий, соответственно один или другой провод находятся в одном или другом направляющем канале, не вызывая аномального износа на роликах, снижая или даже исключая простои оборудования при переходе от режима обработки одного провода к режиму обработки двух проводов, или наоборот;
- обеспечивает обработку проводов широкого диапазона диаметров со скоростью даже до 12-15 м/с;
- обеспечивает получение длины подаваемых проводов без воздействия на нее проскальзываний волочильного колеса и провода;
- обеспечивает очень быстрые регулирование и подготовку;
- обеспечивает получение конечной линейности выше среднего качества;
- обеспечивает содействие введению провода, управление и регулирование подачи провода, даже во время волочения;
- обеспечивает простое и быстрое выполнение операций обслуживания.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ Эти и другие признаки настоящего изобретения будут понятны из нижеследующего описания некоторых иллюстративных вариантов осуществления изобретения, приведенных в качестве не ограничивающих примеров со ссылками на чертежи.
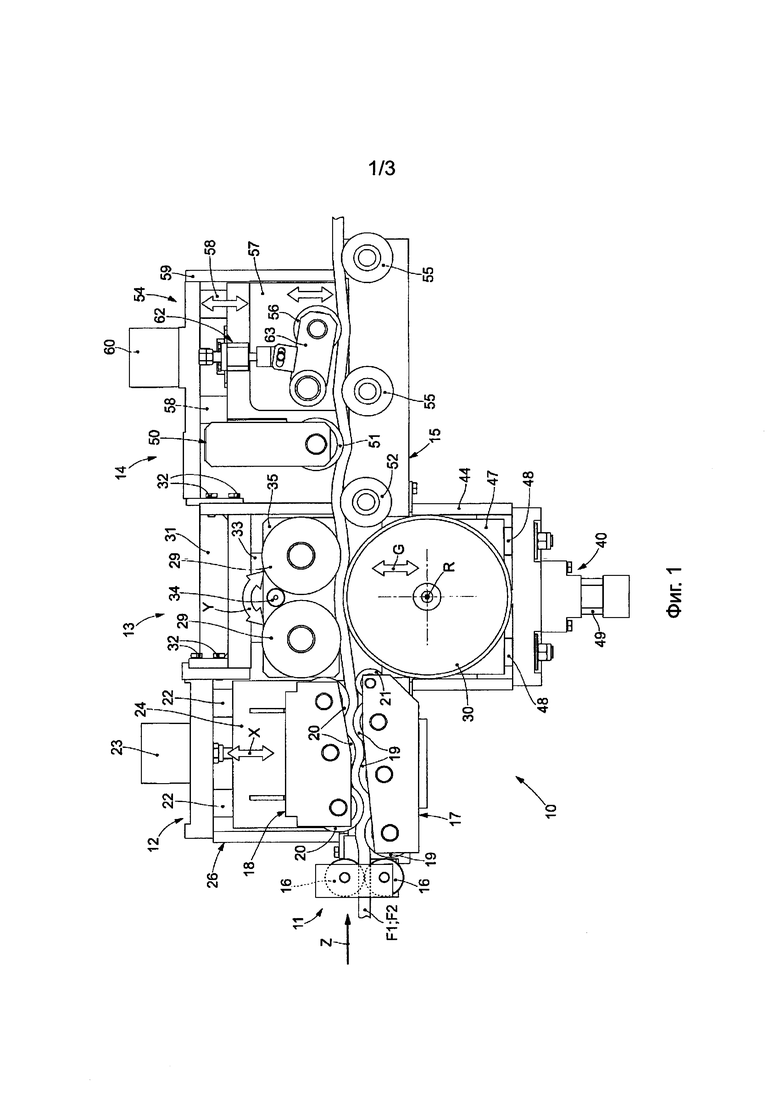
На фиг. 1 показан пример осуществления изобретения, вид спереди со стороны обслуживания.
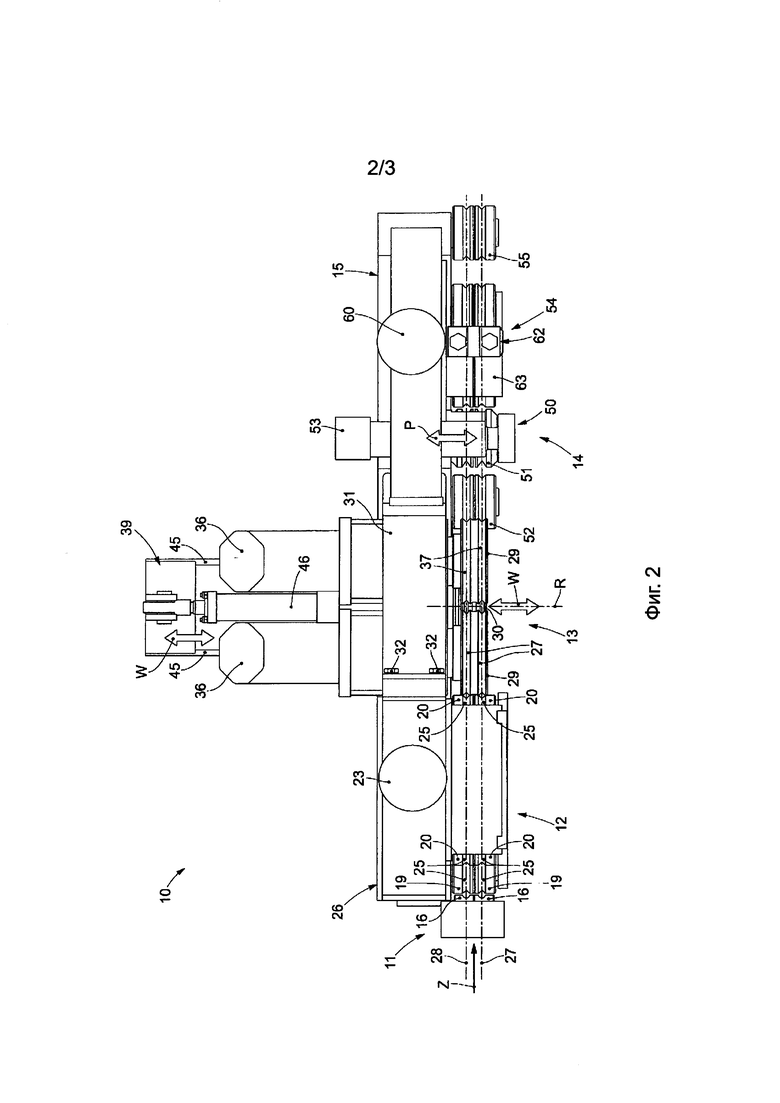
На фиг. 2 показан вид сверху на основание фиг. 1.
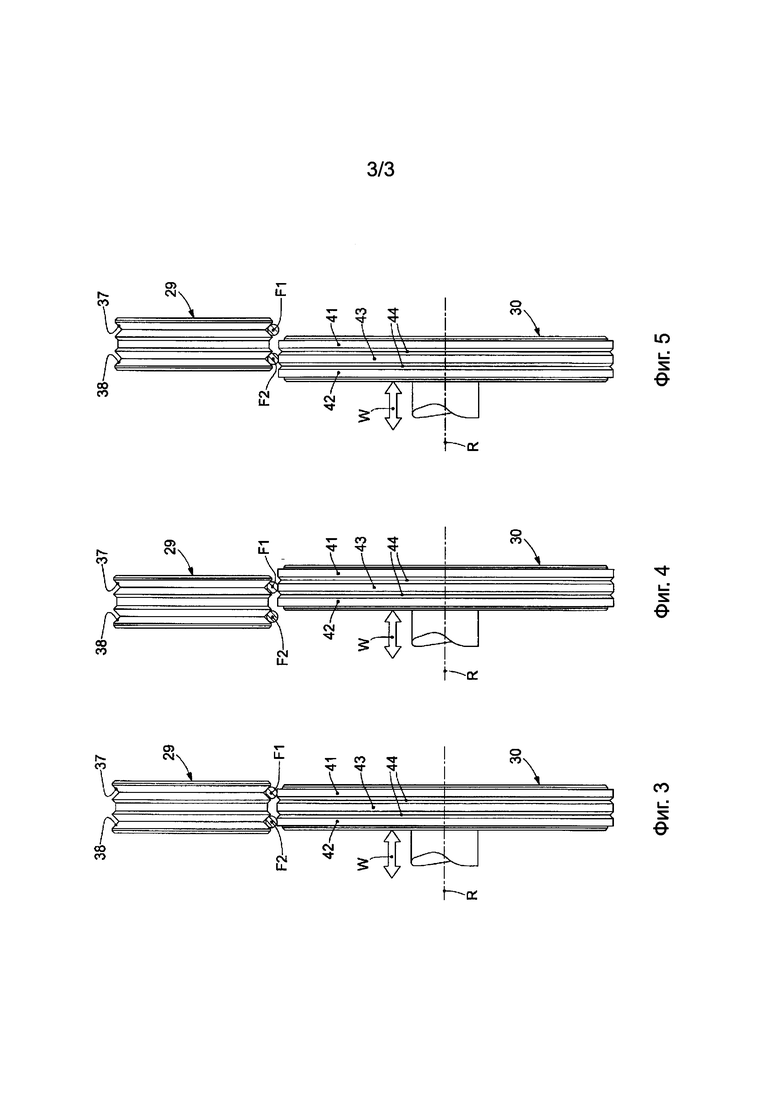
На фиг. 3, 4 и 5 показаны возможные рабочие режимы части устройства в соответствии с настоящим изобретением.
В целях лучшего понимания используются одинаковые номера позиций, где это возможно, для обозначения идентичных общих элементов на чертежах. Разумеется, что элементы и признаки одного примера осуществления изобретения могут входить в другие примеры осуществления изобретения без дополнительный пояснений.
ПОДРОБНОЕ ОПИСАНИЕ НЕКОТОРЫХ ПРИМЕРОВ ОСУЩЕСТВЛЕНИЯ
ИЗОБРЕТЕНИЯ
Как показано на фиг. 1, многофункциональное рабочее устройство 10 включает множество автономных, взаимосвязанных и функционально взаимодействующих узлов 11-14, обеспечивающих удобство хранения, обслуживания и сборки.
Каждый узел является функциональным относительно по меньшей мере одного из следующих, а комбинация узлов представляет собой изобретательский замысел в его самом широком значении.
В техническом решении, приведенном в качестве примера, узлы 11-14 расположены последовательно вдоль траектории обработки Z, и в этом случае непосредственно или косвенно стабильно соединены с единой опорной рамой 15, которая является, например, частью рамы (не показана), подготовленной соответствующим образом в соответствии с конфигурацией, необходимой в каждом случае для пользователя.
Многофункциональное рабочее устройство 10 может быть функционально связано с предшествующими и/или последующими другими подающими узлами, разматывателями, накопителями, производственными машинами и т.д., относящимися к получению окончательного результата обработки металлических проводов, например, проводов F1 и F2, показанных на фиг. 3-5.
Многофункциональное рабочее устройство 10, описанное со ссылками на прилагаемые чертежи, выполнено с возможностью обработки двух проводов F1 и F2, хотя не исключается, что при обычных доработках устройство может быть выполнено с возможностью обработки даже более двух проводов, например, трех или четырех.
Многофункциональное рабочее устройство 10 может обрабатывать:
- два провода F1 и F2 одновременно одинаковым способом;
- два провода F1 и F2, один из которых полностью линеаризован, а другой в основном деформирован и линеаризован;
- один провод F1 или F2.
Многофункциональное рабочее устройство 10 во всей своей полноте включает направляющее устройство для проволоки 11, расположенное впереди всего устройства, принимающее провода F1 и F2 и правильным образом направляющее их в следующий узел.
Направляющее устройство для проволоки 11 выполнено по меньшей мере с одной парой направляющих роликов для проволоки 16, расположенных с противоположных сторон относительно траектории обработки Z и определяющих направляющие зазоры для прохода проводов F1 и F2.
Направляющее устройство для проволоки 11 может быть выполнено со средствами регулирования среднего положения относительно траектории обработки Z и позиционирования направляющих роликов для проволоки 16 в необходимом положении относительно следующего узла.
Направляющие ролики для проволоки 16 могут быть эффективно выполнены с направляющими желобами, которые в комплексе определяют два направляющих зазора, чтобы обеспечивать управляемое введение двух проводов F1 и F2 в обеих координированных степенях подвижности, перпендикулярных траектории обработки Z.
Многофункциональное рабочее устройство 10 включает выпрямляющее устройство 12, известное также как устройство для предварительной деформации, чтобы обеспечивать необходимую предварительную деформацию проводов F1 и F2.
Выпрямляющее устройство 12 выполнено на днище с первым узлом роликов 17, в этом случае установленных в фиксированном положении относительно опорной рамы 15, а вверху - со вторым узлом роликов 18, напротив первого узла роликов 17, в этом случае - с возможностью позиционирования перпендикулярно траектории обработки Z, в направлении, указанном стрелкой X на фиг. 1, чтобы взаимодействовать с первым узлом роликов 17.
Первый узел роликов 17 и второй узел роликов 18 выполнены соответственно с первыми выпрямляющими роликами 19 и вторыми выпрямляющими роликами 20 напротив первых выпрямляющих роликов 19 с учетом траектории обработки Z. В частности, вторые выпрямляющие ролики 20 расположены на траектории обработки Z попеременно с первыми выпрямляющими роликами 19, создавая таким путем множество необходимых и управляемых выпрямительных петлей для перемещаемых проводов F1 и F2.
В показанном примере первый узел роликов 17 выполнен со множеством выпрямляющих роликов, в этом случае с тремя выпрямляющими роликами 19 и одним выходным роликом 21, но он может также быть выполнен со всеми первыми выпрямляющими роликами 19, или даже содержать большее количество роликов, если надо обрабатывать большие или изогнутые провода.
Аналогичным образом, второй узел роликов 18 может быть выполнен со многими роликами, скоординированными с роликами первого узла роликов 17.
Второй узел роликов 18 скользит по направляющим 22, расположенным в поперечном направлении относительно траектории обработки Z.
Элемент позиционирования 23 может быть связан со вторым узлом роликов 18 и служит для перемещения второго узла роликов 18 вдоль направляющих 22.
Выпрямляющее устройство 12 включает раму 26, составляющую одно целое с опорной рамой 15, второй узел роликов 18 и направляющие 22 установлены на раме 22.
Элемент позиционирования 23 может включать масляный или электромеханический толкатель, взаимодействующий с компьютерной системой, контролирующей его положение с возможностью также обеспечивать приложение усилия второго узла роликов 18 на провода F1, F2 в поперечном направлении относительно траектории обработки Z.
Второй узел роликов 18 установлен на опоре 24, соединенной с элементом позиционирования 23, который регулирует положение второго узла роликов 18, как с фиксацией, так и переменно, в соответствии с детальными требованиями перемещения проводов F1 и F2. Второй узел роликов 18 можно отсоединять от опоры 24, например, для быстрой замены роликов.
Первые выпрямляющие ролики 19 и вторые выпрямляющие ролики 20 могут быть выполнены с направляющими желобами 25 (фиг. 2) для проводов F1 и F2.
В частности, первые выпрямляющие ролики 19 и вторые выпрямляющие ролики 20 могут быть выполнены с возможностью определять первый направляющий канал 27 и второй направляющий канал 28, показанные штрих-пунктирными линиями на фиг. 2, для прохода проводов F1 и F2 соответственно.
В соответствии с показанным на фиг. 2 примером осуществления изобретения пары первых выпрямляющих роликов 19 и пары вторых выпрямляющих роликов 20 могут быть выполнены неприводными на одной оси вращения, располагая соответствующие направляющие желоба 25 рядом друг с другом.
В соответствии с возможным техническим решением ролики в парах могут быть независимыми друг от друга и оба неприводными относительно друг друга. В этом случае режим волочения прикладывается только к одному из проводов F1 и F2 и не действует для соседнего провода.
Многофункциональное рабочее устройство 10 включает устройство волочения и деформации 13, расположенное далее по ходу после выпрямляющего устройства 12 и выполненное с возможностью прилагать усилия волочения и деформации, например, чтобы линеаризовать провода F1 и F2.
Устройство волочения и деформации 13 включает противостоящий ролик 30, который может вращаться вокруг своей оси вращения, и по меньшей мере два приводных ролика 29, установленных по периферии противостоящего ролика 30 и взаимодействующих с ним, чтобы определять зазоры для прохождения проводов Fl, F2.
В частности, приводные ролики 29 и противостоящие ролики 30 определяют продолжение первого направляющего канала 27 и второго направляющего канала 28 для прохождения проводов F1 и F2.
Далее, диаметр противостоящего ролика 30 больше диаметра приводных роликов 29.
Наличие приводных роликов 29 во взаимодействии с противостоящим роликом 30 дает по меньшей мере следующие преимущества по сравнению с известными техническими решениями:
- обеспечивает повышение производительности волочения проводов F1, F2, особенно важное условие в случае с проводами крупного калибра;
- способствует созданию необходимых напряжений, например, напряжений волочения в проводах F1, F2, чтобы повышать действие выпрямления и линеаризации самих проводов;
- требует использования более низких мощностей при волочении проводов F1, F2, так как мощность распределяется на два приводных ролика 29;
- как следствие предыдущего пункта происходит снижение износа роликов и, следовательно, частоты обслуживания.
Приводные ролики 29 имеют одинаковый диаметр, однако нельзя исключать, что возможны другие примеры осуществления изобретения, когда диаметры являются разными, например, в случае намерения обрабатывать провода F1, F2 разных диаметров.
В соответствии с возможными примерами осуществления изобретения противостоящий ролик 30 имеет диаметр от 1,5 до 3, предпочтительно от 1,8 до 2,5 диаметра приводных роликов 29.
Соотношение размеров приводных роликов 29 и противостоящего ролика 30 позволяет максимизировать результаты деформации и выпрямления проводов F1 и F2.
В соответствии с возможным примером осуществления изобретения противостоящий ролик 30 может имеет диаметр от 120 мм до 320 мм, а приводные ролики 29 могут имеет диаметр 35 мм до 200 мм.
В соответствии с возможным техническим решением противостоящий ролик 30 и приводные ролики 29 могут иметь в основном одинаковую толщину.
С противостоящим роликом 30 может быть связано устройство индикации, например, кодирующее устройство, выполненное с возможностью определять длину проводов F1 и F2, подаваемых в последующие узлы. Связь устройства индикации с противостоящим роликом 30 позволяет получать точное и надежное определение длины обрабатываемых проводов F1, F2, так как противостоящий ролик 30, будучи не приводным, не подвержен проскальзыванию в результате, например, воздействия процесса волочения.
В соответствии с некоторыми техническими решениями настоящего изобретения выпрямляющие ролики 19 и выходной ролик 21 относительно траектории обработки Z расположены на одной стороне с противостоящим роликом 30. Выходной ролик 21 расположен в непосредственной близости от устройства волочения и деформации 13 и выполнен с возможностью образовывать виток с первым из приводных роликов 29, который наматывается вокруг первого приводного ролика 29. В частности, выходной ролик 21 позволяет повышать угловой диапазон намотки проводов F1 и F2 вокруг приводного ролика 29, повышая действие волочения проводов F1 и F2 и снижая риск проскальзывания.
Устройства волочения и деформации 13 включает раму 31, которая с помощью фиксирующих элементов 32 закреплена к раме 26 выпрямляющего устройства 12, чтобы создать прочную структуру, не подверженную взаимным перемещениям в процессе обработки.
Фиксированная опора 33 с регулируемым по высоте положением закреплена к раме 31 и поддерживает поворотную опору 35 с возможностью горизонтального поворота в указанном стрелкой Y направлении вокруг шпильки 34. Ось поворота шпильки 34 параллельна осям поворота приводных роликов 29. Качание поворотной опоры 35 вокруг шпильки 34 может быть свободным или иным, например, подверженным воздействию средств с упругой функцией (пружин, поршней, листовых пружин и т.д.).
Два приводных ролика 29 установлены на поворотной опоре 25. В частности, два приводных ролика 29 установлены на одной стороне и на другой стороне относительно шпильки 34, например, симметрично относительно нее. Специфическая конфигурация установки приводных роликов 29 на поворотной опоре 35 гарантирует, чтобы провода F1 и F2 всегда захватывались как приводными роликами 29, так и противостоящим роликом 30, даже если провода F1 и F2 имеют резкие изменения или неоднородности размеров.
В соответствии с одним из вариантов (не показан) может быть, например, три приводных ролика 29, установленных рядом друг с другом, при этом третий ролик установлен между двумя внешними роликами. В случае с третьим роликом он может быть на оси качания шпильки 34 поворотной опоры 35.
В соответствии с примером осуществления изобретения, показанном на фиг.2, устройство волочения и деформации 13 включает по меньшей мере один двигатель 36, в этом случае каждый из двух двигателей 36 соединен с приводным роликом 29, чтобы обеспечить его вращение вокруг своей оси.
В соответствии с другим примером реализации изобретения (не показан) оба приводных ролика 29 могут приводиться во вращение одним двигателем 36. В этом случае можно использовать средства регулирования времени движения приводных роликов 29 в зависимости от конкретных потребностей, возникающих в процессе обработки. Средства регулирования могут быть эластичными и/или следящими.
Если устройства волочения и деформации 13 включает двигатель 36 для каждого приводного ролика 29, последний может быть выполнен с координированным приводом, например, чтобы обеспечивать режим волочения проводов F1 и F2. Например, приводной ролик 29 может быть установлен далее по ходу, чтобы обеспечивать вращение с немного более высокой скоростью, например, на 1%-5% быстрее вращения предшествующего приводного ролика 29. Это повышает эффективность выпрямления и линеаризации проводов F1 и F2.
Каждый из приводных роликов 29 выполнен с первой кольцевой канавкой 37 и по меньшей мере со второй кольцевой канавкой 38, каждая из которых пригодна для приема одного из двух проводов F1, F2.
В соответствии с примерами осуществления изобретения, показанными на фиг.3-5, приводные ролики 29 выполнены в едином корпусе, и каждый из них включает первую кольцевую канавку 37 и вторую кольцевую канавку 38.
В соответствии с другим примером реализации изобретения (не показан) каждая первая кольцевая канавка 37 и каждая вторая кольцевая канавка 38 могут быть выполнены на соответствующих роликах, из которых по меньшей мере один является приводным. В этом случае устройство волочения и деформации 13 включает по меньшей мере первую пару роликов и после нее вторую пару роликов, при этом обе пары взаимодействуют по периферии противостоящего ролика 30. В соответствии с этим примером осуществления изобретения первая кольцевая канавка 37 и вторая кольцевая канавка 38 могут быть выполнены отдельными и автономными, возможно соединенными с кольцевыми эластичными средствами для компенсации возможных временных задержек одной из канавок относительно другой.
Первый элемент позиционирования 39 (фиг. 2) связан с противостоящим роликом 30 и выполнен с возможностью перемещать противостоящий ролик 30 в первом направлении W параллельно оси вращения R противостоящего ролика 30. Первый элемент позиционирования 39 позволяет определять по меньшей мере три рабочих режима противостоящего ролика 30 и, следовательно, многофункционального рабочего устройства 10.
В частности, можно обеспечить:
- первый рабочий режим, показанный на фиг. 3, в котором противостоящий ролик 30 взаимодействует как с первыми кольцевыми канавками 37, так и со вторыми кольцевыми канавками 38 двух приводных роликов 29, определяя деформацию и синхронизированный режим волочения обоих проводов F1 и F2;
- второй рабочий режим, показанный на фиг. 4, в котором противостоящий ролик 30 взаимодействует только с первыми кольцевыми канавками 37 приводных роликов 29, определяя продвижение и деформацию первого провода F1; второй провод F2 остается неподвижным и не подвергается волочению;
- третий рабочий режим, показанный на фиг. 5, в котором противостоящий ролик 30 взаимодействует только с вторыми кольцевыми канавками 38 приводных роликов 29, определяя продвижение и деформацию второго провода F2; первый провод F1 остается неподвижным и не подвергается волочению.
В частности, как можно видеть на фиг. 4 и 5, первый элемент позиционирования 39 устанавливает противостоящий ролик 30 вне режима взаимодействия, или вне контакта со вторым проводом F2 (фиг. 4) и, соответственно, с первым проводом F1 (фиг. 5).
В соответствии с возможными техническими решениями противостоящий ролик 30 может быть выполнен с первой кольцевой частью 41, второй кольцевой частью 42 и кольцевой частью 43, расположенной между первой кольцевой частью 41 и второй кольцевой частью 42. Кольцевые части 41, 42, 43 могут быть разделены друг от друга кольцевыми бороздками 61, выполненными на противостоящем ролике 30.
В первом рабочем режиме (фиг. 3) противостоящий ролик 30 прижимает провода F1 и F2 первой кольцевой частью 41 и второй кольцевой частью 42. Во втором и третьем рабочих режимах (фиг. 4 и 5) противостоящий ролик 30 находится в контакте с первым проводом F1 или со вторым проводом F2 третьей кольцевой частью 43.
В соответствии с возможным примером реализации изобретения противостоящий ролик 30 может быть выполнен вместо кольцевых частей 41, 42, 43 по меньшей мере с первой кольцевой канавкой и по меньшей мере со второй кольцевой канавкой, каждая из которых пригодна для приема проводов F1, F2.
Первый элемент позиционирования 39 включает опорный корпус 44 (фиг. 1), установленный на продольных направляющих 45 (фиг. 2), расположенных параллельно оси вращения R противостоящего ролика 30. Привод линейного перемещения 46, например, электроцилиндр или гидроцилиндр, соединен с опорным корпусом 44 и выполнен с возможностью перемещать опорный корпус 44 вдоль продольных направляющих 45. Противостоящий ролик 30 связан с опорным корпусом 44, и воздействие привода линейного перемещения 46 определяет перемещение противостоящего ролика 30 в первом направлении W.
В соответствии с возможными техническими решениями противостоящий ролик 30 может быть связан со вторым элементом позиционирования 40, предназначенным для перемещения противостоящего ролика 30 в направлении, перпендикулярном траектории обработки Z и оси вращения R противостоящего ролика 30, то есть в соответствии с направлением, указанным стрелкой G на фиг. 1.
Второй элемент позиционирования 40 обеспечивает перемещение противостоящего ролика 30 ближе к приводным роликам 29 или далее от приводных роликов 29, чтобы регулировать давление противостоящего ролика 30 и приводных роликов 29 на провода F1 и F2 и обеспечивать операции введения этих проводов.
В рабочем режиме противостоящий ролик 30 прижат к приводным роликам 29, чтобы генерировать соответствующие петли деформации и линеаризации проводов F1 и F2.Давление, прилагаемое противостоящим роликом 30, может иметь заранее заданное значение, например, в зависимости от физико-химических характеристик проводов F1 и F2.
В соответствии с возможным примером осуществления изобретения противостоящий ролик 30 может быть выполнен на опоре 47, установленной со скольжением на поперечных направляющих 48, установленных параллельно стрелке G. Второй элемент позиционирования 40. может включать привод линейного перемещения 49, предназначенный для перемещения опоры 47 вдоль поперечных направляющих 48, следовательно, для перемещения противостоящего ролика 30 ближе к приводному ролику 29 или далее от приводного ролика 29. Поперечные направляющие 48 могут быть установлены на опорном корпусе 44.
В связи с устройством волочения и деформации 13 может быть выполнен другой выходной ролик 52, расположенный после приводных роликов 29 и в непосредственной близости от них и выполненный с возможностью создавать еще одну выпрямительную петлю, наматываемую вокруг второго приводного ролика 29.
Под термином "в непосредственной близости" здесь понимается то, что между приводным роликом 29 и выходным роликом 52 более нет искривленных элементов проводов, которые обрабатываются. Наличие выходного ролика 52 позволяет сгибать обрабатываемые провода F1 и F2 к приводным роликам 29, повышая таким путем диапазон намотки проводов F1 и F2 вокруг приводных роликов 29. Это позволяет интенсифицировать режим волочения проводов F1 и F2 под воздействием приводных роликов 29.
После устройства волочения и деформации 13 установлен отделочный узел 14, снабженный роликами, выполненными с возможностью генерировать последующие петли проводов F1 и F2, способствовать дальнейшим натяжениям деформации меньшего значения, чем в устройстве волочения и деформации 13, и более тонко линеаризовать провода F1 и F2. Выходной ролик 52 может быть установлен на отделочном узле 14 и/или на его составной части.
В соответствии с возможным техническим решением отделочный узел 14 включает первое отделочное устройство 50 и второе отделочное устройство 54, выполненные с возможностью генерировать отделочные петли в плоскости, параллельной и перпендикулярной плоскости расположения осей приводных роликов 29. Первое отделочное устройство 50 и второе отделочное устройство 54 установлены на опоре 57, подвижной вдоль направляющих 58, установленных на раме 59.
Рама 59 может быть неподвижно связана с обеими рамами 31 и 26, чтобы формировать указанную опорную раму 15 во всей ее полноте.
Направляющие 58 перпендикулярны траектории обработки Z и оси фиксированных роликов 55.
Приводной элемент 60 связан с опорой 57, чтобы перемещать опору 57 и, следовательно, первое отделочное устройство 50 и второе отделочное устройство 54 перпендикулярно траектории обработки Z и осям первого отделочного устройства 50 и второго отделочного устройства 54. Такое перемещение позволяет первому отделочному устройству 50 и второму отделочному устройству 54 генерировать отделочные петли проводов F1 и F2 в плоскости, параллельной плоскости расположения роликов.
В соответствии с примером реализации изобретения первое отделочное устройство 50 включает отделочный ролик 51 на противоположной от выходного ролика 52 стороне относительно траектории обработки Z, выборочно подвижный в направлении, параллельном оси его вращения, показанном стрелкой Р на фиг. 2.
С отделочным роликом 51 соединен приводной элемент 53, например, привод линейного перемещения, выполненный с возможностью перемещать отделочный ролик 51 в направлении стрелки Р, т.е. параллельно оси отделочного ролика 51, чтобы генерировать петлю в горизонтальной плоскости, с необходимым постоянным или переменным значением в зависимости от требований линеаризации, что можно определять специальными датчиками (не показаны). Отделочный ролик 51 выполнен также с кольцевыми канавками, чтобы вмещать и направлять провода F1 и F2 во время их движения.
Второе отделочное устройство 54 включает фиксированные ролики 55, расположенные на первой стороне проводов F1, F2, и подвижный ролик 56, расположенный на противоположной стороне проводов F1 и F2 и в промежуточном положении между фиксированными роликами 55. Подвижный ролик 56 может перемещаться ближе к фиксированным роликам 55 или далее от них, чтобы генерировать необходимый диапазон отделочной петли проводов F1 и F2.
В соответствии с приведенным на фиг. 1 примером осуществления изобретения подвижный ролик 56 установлен на опоре 57. С опорой 57 связан по меньшей мере один регулятор 62, который определяет другое действие позиционирования подвижного ролика 56 относительно фиксированных роликов 55. Позиционирование обеспечивает поддержку подвижного ролика 56 в фиксированном или упруго противопоставленном положении. Регулятор 62 действует на рычаг 63, который может поворачиваться вертикально и поддерживать подвижный ролик 56 с одного конца.
В соответствии с возможным примером реализации изобретения подвижный ролик 56 может быть выполнен парой роликов, каждый их которых связан с соответствующим регулятором 62 и выполнен с возможностью воздействовать на соответствующий провод F1, F2. Независимый регулятор 62 позволяет обеспечивать дифференцированное воздействие отделки на провода F1 и F2.
Как можно понять, изобретение обеспечивает минимальные решения в различных условиях.
Так, можно выполнять узлы 11, 12 и 13 с выходным роликом 52, или выполнять узлы 11, 13 и 14, или выполнять другие комбинации относительно получаемых результатов и/или типов обрабатываемых проводов F1, F2.
Понятно, что можно выполнять частичные модификации и/или дополнения к описанному многофункциональному рабочему устройству 10 в пределах области техники и объема настоящего изобретения.
Понятно также, что хотя настоящее изобретение было описано со ссылками на некоторые конкретные примеры, специалист в данной области техники может, конечно, достичь многих других эквивалентных форм многофункционального рабочего устройства 10, имеющего признаки, которые представлены в формуле настоящего изобретения и поэтому включены в связи с этим в область защиты.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВВЕДЕНИЯ ПОРОШКОВОЙ ПРОВОЛОКИ В ВАННУ РАСПЛАВЛЕННОГО МЕТАЛЛА И УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2427651C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПОДАЧЕЙ НЕПРЕРЫВНОГО УДЛИНЕННОГО ЭЛЕМЕНТА В ТЕХНОЛОГИЧЕСКОМ ПРОЦЕССЕ СБОРКИ ШИН ДЛЯ КОЛЕС ТРАНСПОРТНЫХ СРЕДСТВ | 2014 |
|
RU2673286C2 |
| САМОХОДНАЯ УБОРОЧНАЯ МАШИНА И СПОСОБ УПРАВЛЕНИЯ САМОХОДНОЙ УБОРОЧНОЙ МАШИНОЙ | 2014 |
|
RU2638189C2 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ПРОВОЛОКИ ИЗ (α+β)-ТИТАНОВОГО СПЛАВА ДЛЯ АДДИТИВНОЙ ТЕХНОЛОГИИ | 2018 |
|
RU2751070C2 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ПРОВОЛОКИ ИЗ (α+β)-ТИТАНОВОГО СПЛАВА ДЛЯ АДДИТИВНОЙ ТЕХНОЛОГИИ С КОНТРОЛЕМ ПОЛЯ ДОПУСКА ТЕМПЕРАТУРЫ ДЕФОРМАЦИИ | 2018 |
|
RU2691815C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ПРОВОЛОКИ ИЗ (a+b)- ТИТАНОВОГО СПЛАВА ДЛЯ АДДИТИВНОЙ ТЕХНОЛОГИИ | 2018 |
|
RU2690262C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ПРОВОЛОКИ ИЗ (α+β)-ТИТАНОВОГО СПЛАВА ДЛЯ АДДИТИВНОЙ ТЕХНОЛОГИИ С ИНДУКЦИОННЫМ НАГРЕВОМ И С ВЫСОКОЙ СТЕПЕНЬЮ ДЕФОРМАЦИИ | 2018 |
|
RU2690869C1 |
| УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ МНОГОЖИЛЬНЫХ ПРУЖИН | 2016 |
|
RU2628722C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ПРОВОЛОКИ ИЗ (α+β)-ТИТАНОВОГО СПЛАВА ДЛЯ АДДИТИВНОЙ ТЕХНОЛОГИИ | 2018 |
|
RU2751068C2 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ПРОВОЛОКИ ИЗ (α+β) - ТИТАНОВОГО СПЛАВА ДЛЯ АДДИТИВНОЙ ТЕХНОЛОГИИ С ВЫСОКОЙ СКОРОСТЬЮ И СТЕПЕНЬЮ ДЕФОРМАЦИИ | 2018 |
|
RU2690263C1 |
Изобретение относится к устройствам для обработки металлической проволоки и может быть использовано для производства профилированной металлической проволоки любого типа. Многофункциональное рабочее устройство включает устройство волочения и деформации (13) и по меньшей мере одно направляющее устройство для проволоки (11), выпрямляющее устройство для проволоки (12) или отделочный узел (14), при этом устройство волочения и деформации (13) включает противостоящий ролик (30), вращаемый вокруг своей оси вращения (R), и по меньшей мере два приводных ролика (29), установленных по периферии указанного противостоящего ролика (30). Обеспечивается расширение технологических возможностей устройства, повышается удобство обслуживания и управления. 2 н. и 14 з.п. ф-лы, 5 ил.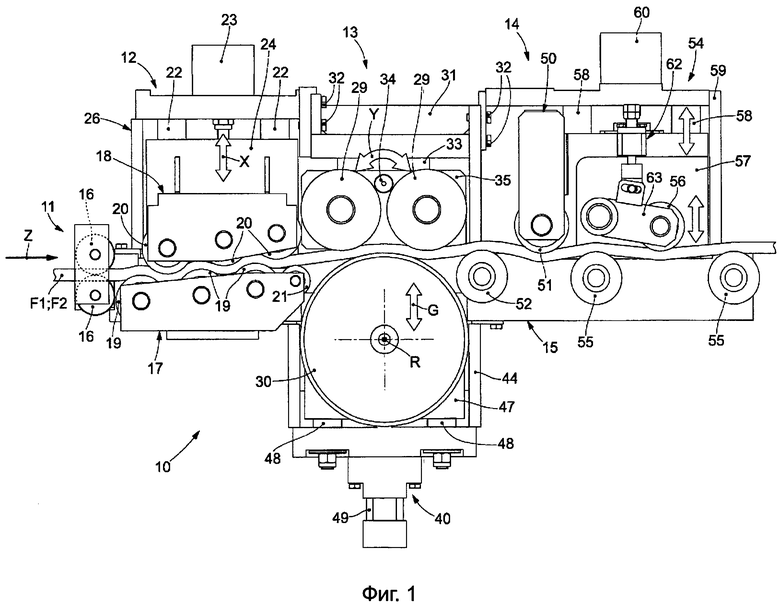
1. Устройство волочения и деформации проволоки, содержащее ролики, установленные с образованием зазора для прохождения проволоки (F1, F2), отличающееся тем, что ролики включают в себя по меньшей мере два приводных ролика (29) и неприводной противостоящий им ролик (30), выполненный с диаметром, большим диаметров указанных приводных роликов (29), и установленный с возможностью вращения вокруг своей оси вращения (R), при этом приводные ролики установлены по периферии указанного неприводного противостоящего ролика (30).
2. Устройство по п. 1, отличающееся тем, что указанные приводные ролики (29) установлены на опоре (35), выполненной с возможностью горизонтального поворота вокруг шпильки (34), при этом ось ее поворота параллельна осям поворота указанных приводных роликов (29) и оси поворота указанного противостоящего ролика (30).
3. Устройство по п. 1 или 2, отличающееся тем, что каждый из указанных приводных роликов (29) выполнен с первой кольцевой канавкой (37) и по меньшей мере со второй кольцевой канавкой (38), каждая из которых предназначена для приема соответствующей проволоки (F1, F2).
4. Устройство по одному из пп. 1-3, отличающееся тем, что указанный противостоящий ролик (30) выполнен с первой кольцевой канавкой и по меньшей мере со второй кольцевой канавкой, каждая из которых предназначена для приема соответствующей проволоки (F1, F2).
5. Устройство по п. 3, отличающееся тем, что оно снабжено первым элементом позиционирования (39), связанным с указанным противостоящим роликом (30) и выполненным с возможностью перемещения указанного противостоящего ролика (30) в направлении (W), параллельном указанной оси вращения (R) указанного противостоящего ролика (30), с возможностью по меньшей мере определения:
- первого рабочего режима, в котором указанный противостоящий ролик (30) расположен с возможностью взаимодействия с указанными первыми кольцевыми канавками (37) и указанными вторыми кольцевыми канавками (38) указанных приводных роликов (29),
- второго рабочего режима, в котором указанный противостоящий ролик (30) расположен с возможностью взаимодействия только с указанными первыми кольцевыми канавками (37) указанных приводных роликов (29),
- третьего рабочего режима, в котором указанный противостоящий ролик (30) расположен с возможностью взаимодействия только с указанными вторыми кольцевыми канавками (38) указанных приводных роликов (29).
6. Устройство по одному из пп. 1-5, отличающееся тем, что оно снабжено вторым элементом позиционирования (40), связанным с указанным противостоящим роликом (30) и выполненным с обеспечением позиционирования указанного противостоящего ролика (30) в направлении, перпендикулярном указанной траектории обработки (Z) и указанной оси вращения (R) указанного противостоящего ролика (30).
7. Устройство по одному из пп. 1-6, отличающееся тем, что указанный противостоящий ролик (30) выполнен с диаметром от 1,5 до 3, предпочтительно от 1,8 до 2,5 диаметра приводных роликов (29).
8. Многофункциональное рабочее устройство для обработки проволоки, содержащее направляющее устройство (11) для проволоки, выпрямляющее устройство (12) для проволоки, устройство волочения и деформации (13) проволоки и отделочный узел (14), отличающееся тем, что устройство для волочения и деформации (13) проволоки выполнено по любому из пп. 1-7.
9. Устройство по п. 8, отличающееся тем, что указанное выпрямляющее устройство (12) для проволоки выполнено с возможностью стимулирования заданной предварительной деформации указанных проволок (F1, F2) и снабжено первым узлом роликов (17), установленным в фиксированном положении, и вторым узлом роликов (18), установленным напротив указанного первого узла (17) и позиционируемым в направлении, перпендикулярном траектории обработки (Z) с возможностью взаимодействия с указанным первым узлом роликов (17).
10. Устройство по п. 9, отличающееся тем, что указанный первый узел роликов (17) выполнен с множеством первых выпрямляющих роликов (19) для проволоки и выходным роликом (21), которые расположены в непосредственной близости от устройства волочения и деформации (13) проволоки, при этом указанные первые выпрямляющие ролики (19) для проволоки и указанный выходной ролик (21) относительно траектории обработки (Z) расположены на одной стороне с противостоящим роликом (30), а указанный выходной ролик (21) выполнен с возможностью формирования с одним из указанных приводных роликов (29) петли указанной проволоки (F1, F2), охватывающей указанный приводной ролик (29).
11. Устройство по п. 10, отличающееся тем, что оно снабжено дополнительным выходным роликом (52), расположенным после приводных роликов (29) в непосредственной близости от них и выполненным с возможностью формирования выпрямительной петли, наматываемой вокруг второго из указанных приводных роликов (29).
12. Устройство по одному из пп. 8-11, отличающееся тем, что отделочный узел (14), установленный после устройства (13) для волочения и деформации металлической проволоки, включает первое отделочное устройство (50) и второе отделочное устройство (54), выполненные с возможностью образования отделочных петель указанных проволок (F1, F2) в плоскости, параллельной и перпендикулярной плоскости расположения осей соответствующих приводных роликов (29).
13. Устройство по одному из пп. 8-12, отличающееся тем, что указанные направляющее устройство (11) для проволоки, выпрямляющее устройство (12) для проволоки, устройство для волочения и деформации (13) проволоки и отделочный узел (14) расположены по порядку вдоль траектории обработки (Z).
14. Устройство по одному из пп. 8-13, отличающееся тем, что по меньшей мере выпрямляющее устройство (12) для проволоки, устройство для волочения и деформации (13) проволоки или отделочный узел (14) снабжены рамой (26, 31, 59).
15. Устройство по п. 13, отличающееся тем, что оно снабжено единой опорной рамой (15), жестко соединенной с указанными направляющим устройством (11) для проволоки, выпрямляющим устройством (12) для проволоки, устройством волочения и деформации (13) проволоки и отделочным узлом (14).
16. Устройство по одному из пп. 10-15, отличающееся тем, что оно снабжено устройством индикации, соединенным с указанным противостоящим роликом (30) и выполненным с возможностью определения длины проволок (F1, F2), подаваемых в следующие за ним устройства и узлы.
| WO 2014132207 A1, 04.09.2014 | |||
| СПОСОБ ПОДАЧИ ПРОВОЛОКИ | 1986 |
|
RU2012460C1 |
| EP 2949407 A1, 02.12.2015 | |||
| CN 103056246 B, 10.12.2014 | |||
| ПРОМЕЖУТОЧНОЕ ТЯГОВОЕ УСТРОЙСТВО В.Н. СТАЗАЕВА | 2011 |
|
RU2475318C1 |
| Механизм подачи | 1990 |
|
SU1771903A1 |

