Область техники
Настоящее изобретение, в общем, относится к области тормозных систем железнодорожного транспорта; в частности, изобретение касается системы для управления аварийным и служебным торможением железнодорожного транспорта.
Уровень техники
Традиционные тормозные системы железнодорожного транспорта выполняют разные функции, характеризующиеся состоянием железнодорожного транспорта. Две основные функции известны как «служебное торможение» и «аварийное торможение».
Служебное торможение - это состояние, в котором скорость железнодорожного транспорта замедляется на нормальном этапе эксплуатации. В этом состоянии эффективность торможения должна обеспечиваться с вероятностью выхода из строя менее 10-7. Это значение соответствует уровню целостности безопасности SIL2, указанному в EN50126.
Аварийное торможение - это состояние, в котором подвижной состав должен обеспечить торможение в пределах тормозного пути, определенного международными стандартами, с вероятностью недостижения эффективности, стандартно равной или меньшей 10-9. Это значение соответствует уровню целостности безопасности SIL4 стандарта EN50126.
Относительно варианта осуществления служебного торможения, тормозные системы для железнодорожного транспорта на данный момент полностью управляются электронными системами управления, взаимодействующими с системами управления тягловых электродвигателей, используемых в рекуперативном режиме во время торможения (электродинамический тормоз), и с системами TCMS – «Системами Контроля, Диагностики и Управления» для обеспечения постоянного обмена информацией о диагностике и управления в режиме реального времени для компенсации возможных неисправностей служебной тормозной системы или электродинамического тормоза.
Такой вариант осуществления посредством электронных систем существенно повысил комфорт пассажиров, например, обеспечивая приемлемые изменения ускорения или путем динамической компенсации изменения коэффициентов трения фрикционных материалов, так как скорость изменяется при поддержании постоянного снижения скорости.
С другой стороны, такие электронные системы управления служебным торможением стали системами с возрастающей степенью сложности, с архитектурой микропроцессора в основе, выполняющей большое количество программных кодов, связанных не только с процессами, выполняемыми в режиме реального времени, для управления тормозом, но и с управлением процессами диагностики всей тормозной системы и управлением сложными коммуникационными протоколами, такими как Ethernet или MVB. По этой причине главные операторы отрасли предпочитают использовать чисто пневматические решения на этапе аварийного торможения.
Это подтверждается публикацией железнодорожного стандарта EN16185. Этим стандартом унифицируются тормозные системы, которые имеют два действующих одновременно пневматических канала для аварийного торможения.
Причина этого выбора, сделанного операторами, связана с внутренне присущим высоким уровнем безопасности и коэффициентом надежности, которые демонстрирует во времени пневматическая архитектура и используемые пневматические компоненты в противоположность низкой надежности электронных систем. Низкая надежность, в основном, связана с вероятным наличием общих программных ошибок, которые могут возникать одновременно во всем подвижном составе во время аварийного торможения, частично или полностью снижающих возможность достижения тормозного пути.
Однако, этот технологический выбор вступает в конфликт с постоянно возрастающими потребностями в точности тормозного пути во время аварийного торможения.
Пневматические системы и компоненты становятся неточными в связи с температурной зависимостью рессор и резиновых субкомпонентов и их износом.
Дополнительно европейский стандарт EN15611 определяет строгие ограничения для допусков упомянутых пневматических систем и компонентов, что усложняет процесс их производства и делает их чрезвычайно дорогостоящими.
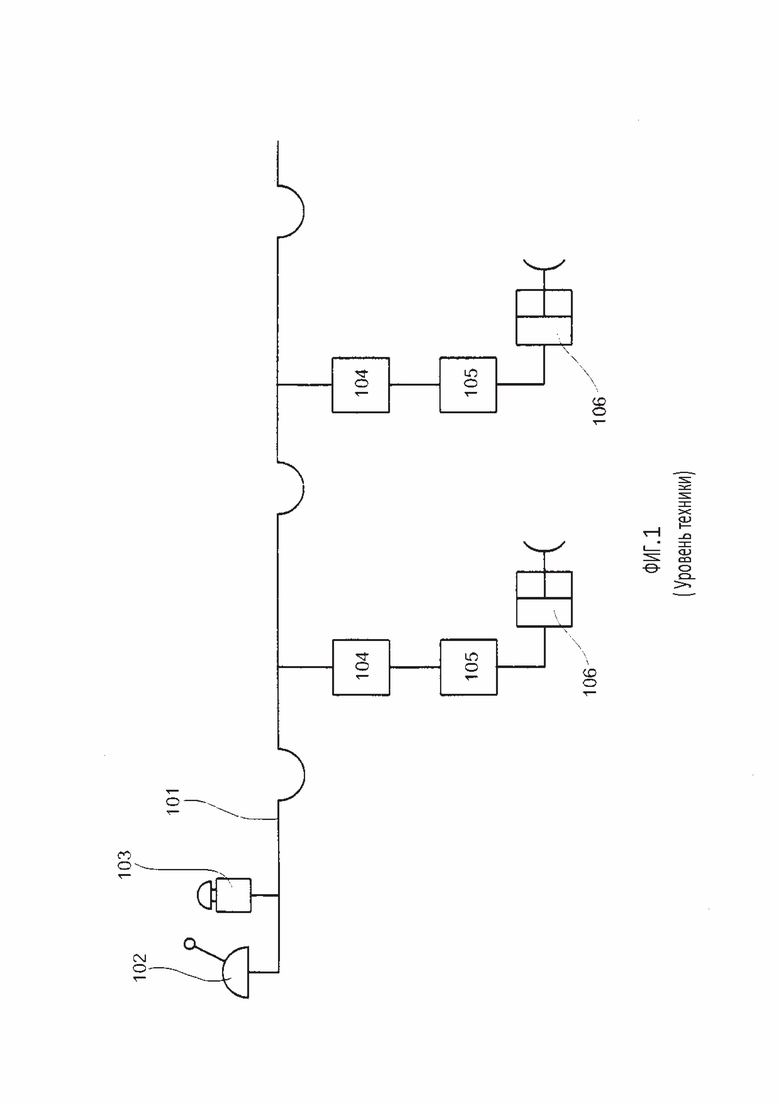
Пример пневматической тормозной системы, включающей в себя служебное и аварийное торможение и известной специалистам в данной области техники, показан на Фигуре 1.
Давление в магистрали 101 модулируется тормозным клапаном 102 в меняющемся диапазоне давления от 5 до 3,5 бар, при этом значение 5 бар представляет требуемое нулевое торможение, а 3,5 бар - максимальное служебное торможение.
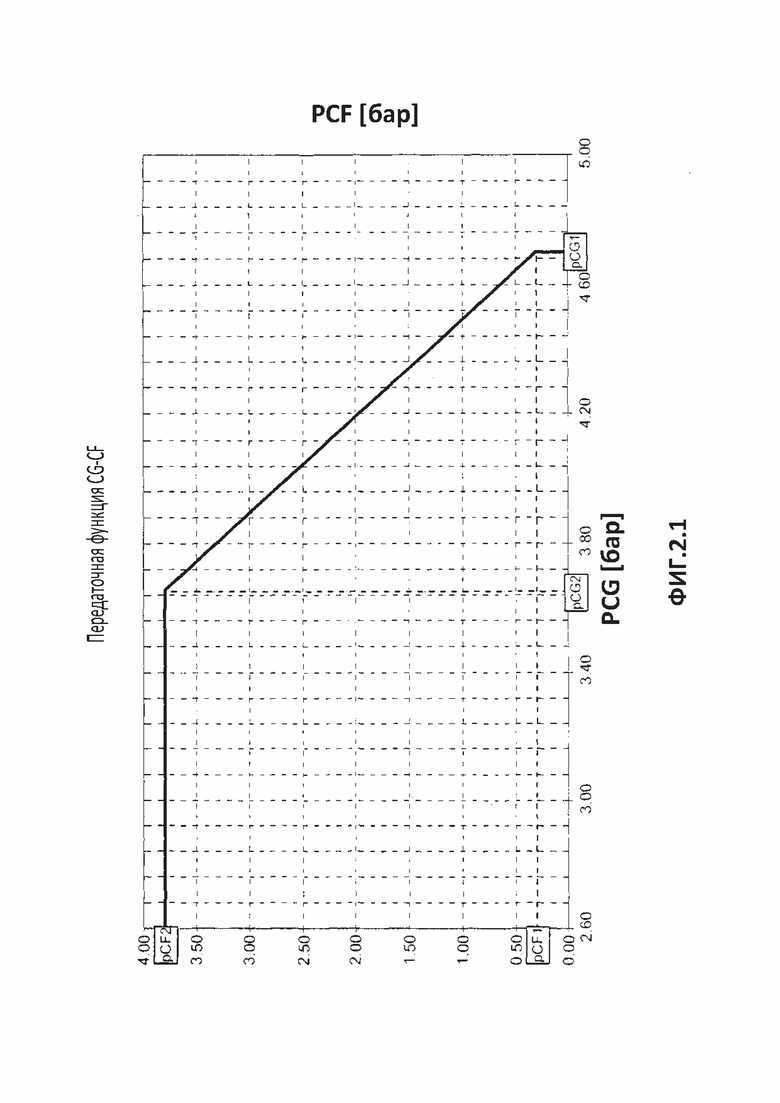
Аварийной кнопкой 103 давление в магистрали снижается до значения ниже 3,5 бар, являющегося требуемым значением аварийного торможения. Распределительный клапан 104 модулирует давление на выходе как функцию давления в магистрали 101 согласно графику, представленному на Фигуре 2.1.
Для значения давления в магистрали на уровне 5 бар давление на выходе распределительного клапана 104 является нулевым и соответствует требуемому нулевому торможению.
Для значений давления в магистрали от 5 до 3,5 бар давление на выходе распределительного клапана изменяется линейно в диапазоне от 0 до 3,8 бар; при этом 3,8 бар является давлением, соответствующим аварийному торможению.
Для значений давления в магистрали ниже 3,5 бар давление на выходе распределительного клапана остается на уровне 3,8 бар, т.е. на уровне давления, соответствующем аварийному торможению.
Аварийная кнопка 103 предназначена для сброса давления в магистрали ниже 3,5 бар, что осуществляется значительно быстрее, чем с помощью тормозного клапана, ускоряя переход от состояния служебного торможения в состояние аварийного торможения.
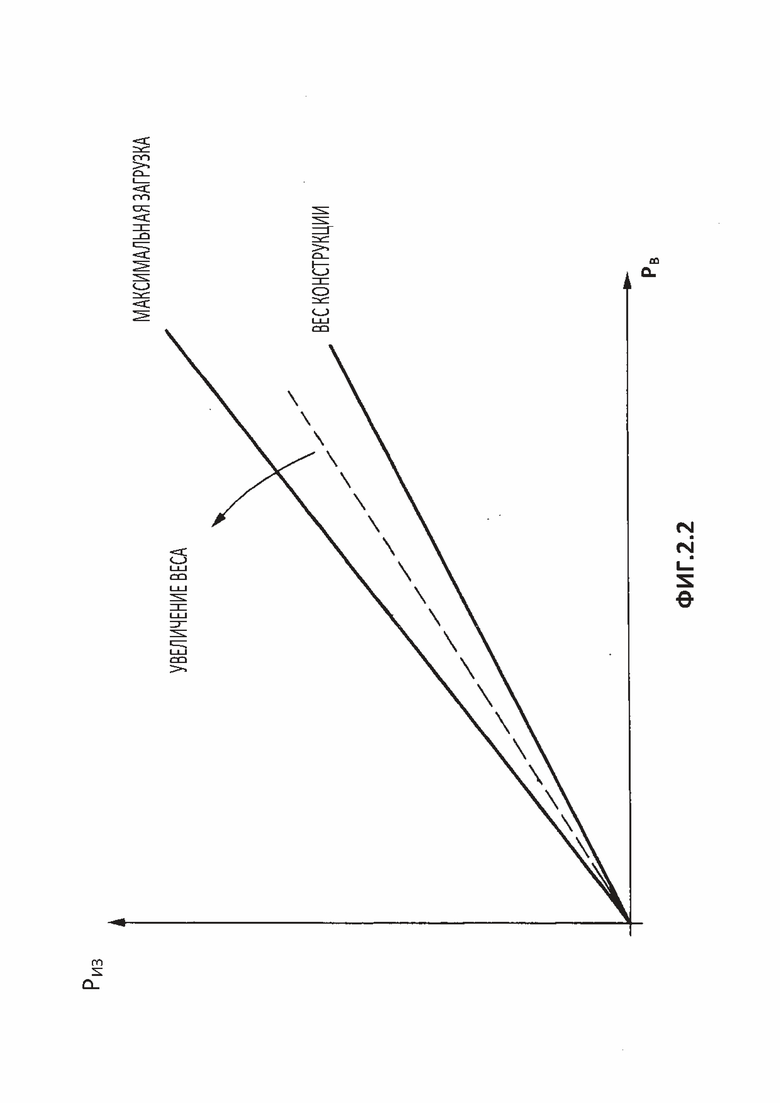
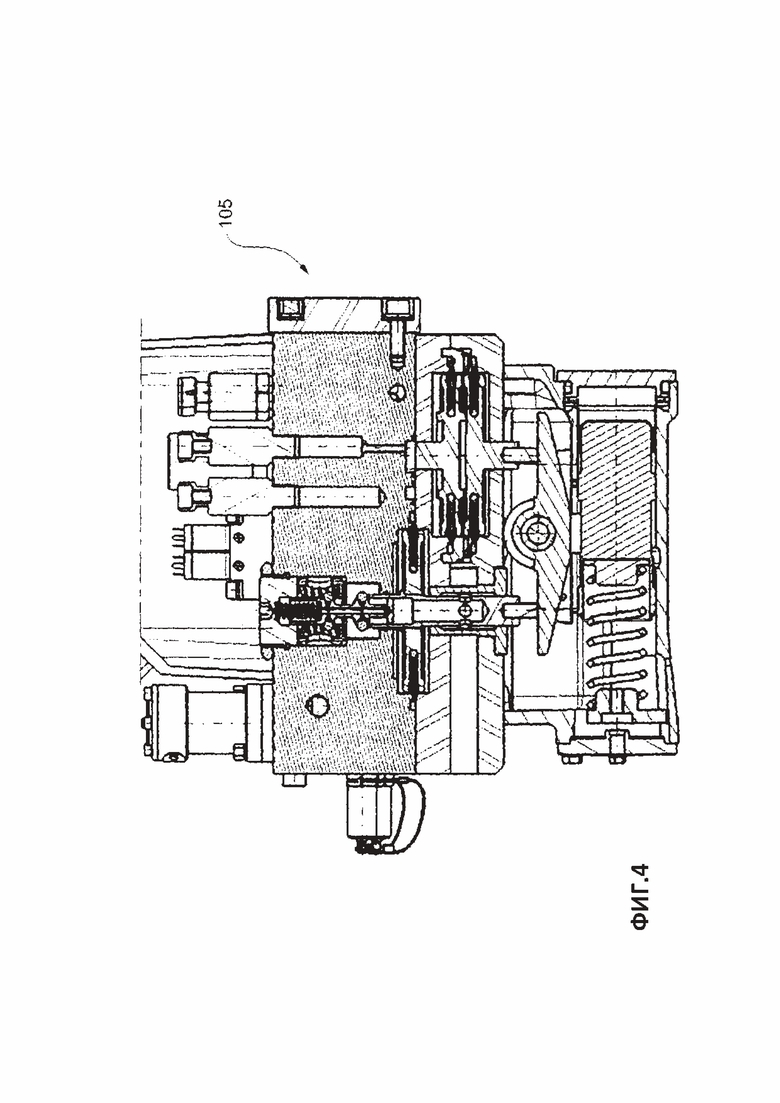
Двухрежимный клапан 105, также известный в кругу специалистов как VCAV, франц. “Vide-Chargè Auto-Variable”, предназначен для коррекции давления, направленного в тормозной цилиндр 106, как функция веса транспортного средства согласно характеристик, изображенных на Фигуре 2.2.
Цель последней функции заключается в ограничении давления в соответствии с допустимым сцеплением, рассматриваемом на этапе проектирования транспортного средства, другими словами, в обеспечении максимально возможного давления торможения, при выходе за пределы которого превышается допустимая сила сцепления. При превышении допустимой силы сцепления блокируются оси, вследствие чего появляются выбоины на колесах и снижается усилие торможения в связи с переходом с трения второго рода на трение первого рода самих колес.
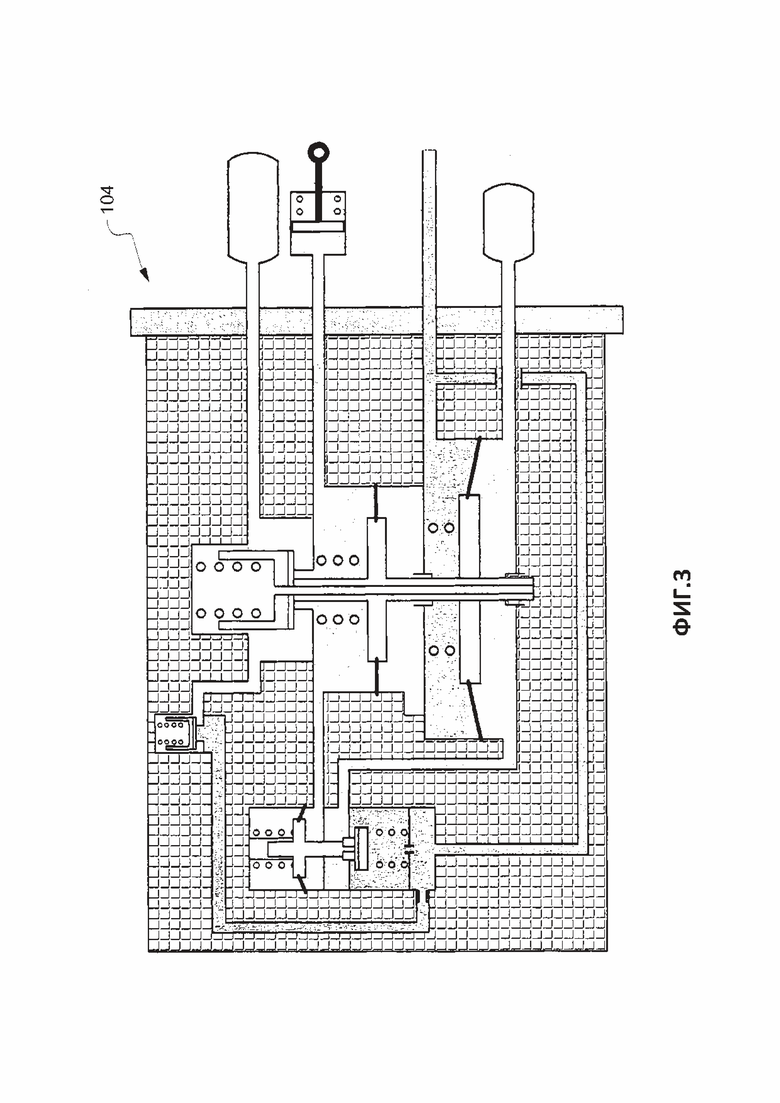
Распределительный клапан 104 и двухрежимный клапан 105, схематически показанные на Фигуре 3 и Фигуре 4, соответственно, являются чрезвычайно сложными пневматическими компонентами.
В частности, по каждой новой заявке двухрежимный клапан 105 требует изменения конструкции внутренних элементов, таких как, например, загрузка рессор или передаточное отношение рычажного механизма, которые необходимо перенастраивать на новые диапазоны веса между собственной и полной нагрузкой транспортного средства и сцепления, допустимого для такой заявки.
Дополнительно, как правило, существуют разные конфигурации субкомпонентов двухрежимного клапана 105 для одного состава, так как интервал между собственной и полной нагрузкой изменяется для разных вагонов, представляющих подвижной состав, например, между моторными вагонами и прицепными вагонами.
Наконец, на этапе ввода в эксплуатацию подвижного состава необходимо проведение постоянной повторной калибровки, которая предполагает частую замену самих субкомпонентов до достижения правильной конфигурации.
Вариант осуществления электронных систем для железнодорожного применения на данный момент регулируется следующими европейскими железнодорожными стандартами:
- EN50126 “Применение для железнодорожного транспорта. Спецификация и демонстрация надежности, эксплуатационной готовности, ремонтопригодности и аварийности (RAMS). Основные требования и комплексный процесс»;
- EN50128 “Применение для железнодорожного транспорта - Системы связи, сигнализации и обработки - Программное обеспечение для железнодорожных систем управления и защиты”;
- EN50129 “Применение для железнодорожного транспорта. Системы связи, сигнализации и обработки. Электронные системы безопасности для сигнализации».
В частности, стандартом EN50126 определяется методология распределения уровней безопасности SIL0/1/2/3/4 между подсистемами на основе результатов Анализа безопасности, а стандартами EN50128 и EN50129 определяются проектные критерии, применяемые к программным и аппаратным компонентам, соответственно, согласно распределенным уровням УЦБ.
На основе применения вышеуказанных стандартом можно дать следующие формулировки и понятия:
- Электронные системы, используемые для реализации функции служебного торможения, могут, в принципе, быть выполнены в соответствии с положениями упомянутых стандартов, ограничивающими указанную реализацию до уровней безопасности не выше SIL2;
- Электронные системы, используемые для достижения функции аварийного торможения, могут быть выполнены в соответствии с положениями упомянутых стандартов, ограничивающими указанный уровень достижения до уровней безопасности не выше SIL3.
Состояние техники обеспечивает реализацию электронных систем, соответствующих уровням SIL ≤ 2 для управления служебным торможением; однако, чрезвычайно сложно разрабатывать и обеспечивать техническое обслуживание электронных систем, которые соответствуют уровням SIL ≥ 3.
Отношение сложности и стоимости разработки и сертификации между системами SIL ≤ 2 и системами SIL ≥ 3 обычно варьируется в пределах от 1:20 до 1:40.
Также Нотифицированный орган сертификации по безопасности (Нотифицированный орган) и Агентство национальной безопасности (Агентство безопасности) не принимают совместного существования программных модулей, разработанных на разных уровнях УЦБ, выполняемых той же архитектурой аппаратного обеспечения, ни 3-уровневых программных модулей УЦБ, выполняемых архитектурой аппаратного обеспечения SIL≥ ≤ 2 для электронных архитектур, которые должны достичь общего уровня SIL ≥ 3.
Таким образом, очевидно, что разработка отдельных электронных архитектур, которая может одновременно обеспечить функцию служебного торможения, функции аварийного торможения, функции диагностики и другие функции, нерентабельна, так как упомянутые архитектуры были бы полностью достигнуты по уровням SIL ≥ 3 при высоком уровне расхода экономических ресурсов и длительном времени разработки.
Сущность изобретения
Таким образом, задача настоящего изобретения состоит в предоставлении электронной системы управления аварийного и служебного торможения железнодорожного транспорта, которая обеспечивает разъединение и независимость функции аварийного торможения от функции служебного торможения и других дополнительных функций, обеспечивая общую изоляцию деталей, соответствующих уровню SIL ≥ 3, от деталей, соответствующих уровню SIL ≤ 2, при этом сосредотачивая значения давления торможения на одном общем приводе, таким образом, сокращая стоимость разработки, установки и технического обслуживания полностью электронной системы управления тормозных систем железнодорожного транспорта.
Упомянутые и другие задачи и преимущества достигаются, в соответствии с аспектом изобретения, электронной системой управления аварийным торможением железнодорожного транспорта, имеющей характеристики, определенные в независимых пунктах. Предпочтительные варианты осуществления изобретения определены в зависимых пунктах формулы изобретения.
Краткое описание чертежей
Описание функциональных и структурных характеристик некоторых предпочтительных вариантов осуществления изобретения электронной системы управления аварийного и служебного торможения в соответствии с настоящим изобретением дается ниже. Ссылка дается на прилагаемые чертежи, в которых:
- Фигура 1 иллюстрирует в упрощенном виде пневматическую тормозную систему, включающую в себя служебное и аварийное торможение, известную специалистам в данной области техники; с целью упрощения основные и вспомогательные резервуары не указываются, также все вспомогательные функции не необходимы для пояснение примером;
- Фигура 2.1 иллюстрирует функцию входа-выхода распределительного клапана;
- Фигура 2.2 иллюстрирует кривую, которая функционально имитирует двухрежимный клапан 105, при этом термин «максимальная загрузка» указывает на необычное состояние пассажирской перегрузки;
- Фигура 3 схематически иллюстрирует распределительный клапан;
- Фигура 4 иллюстрирует поперечное сечение двухрежимного клапана;
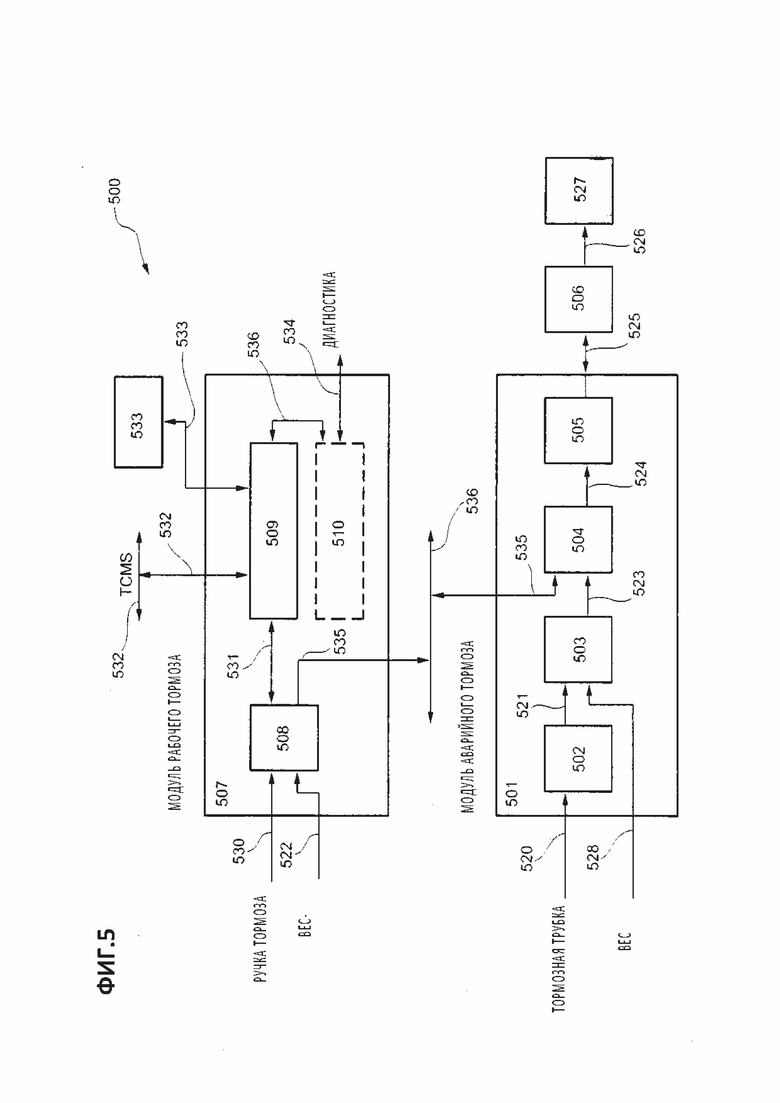
- Фигура 5 иллюстрирует первый вариант осуществления изобретения электронной системы управления аварийного и служебного торможения;
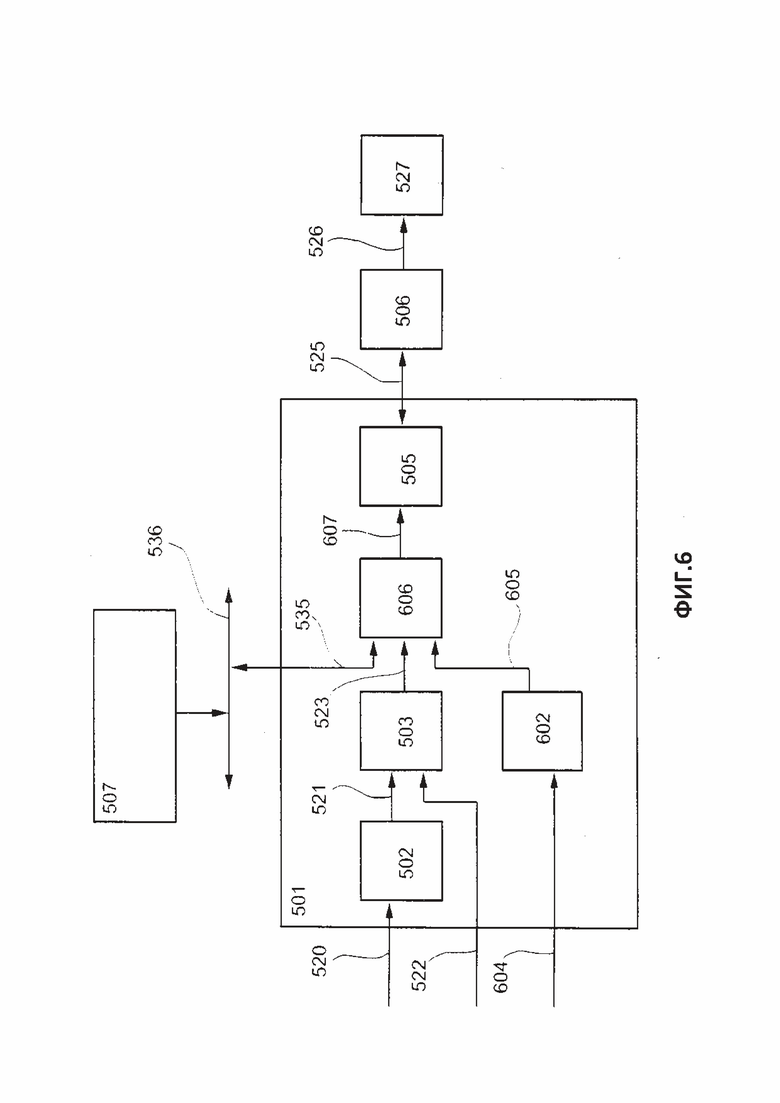
- Фигура 6 иллюстрирует первый вариант осуществления изобретения модуля аварийного торможения;
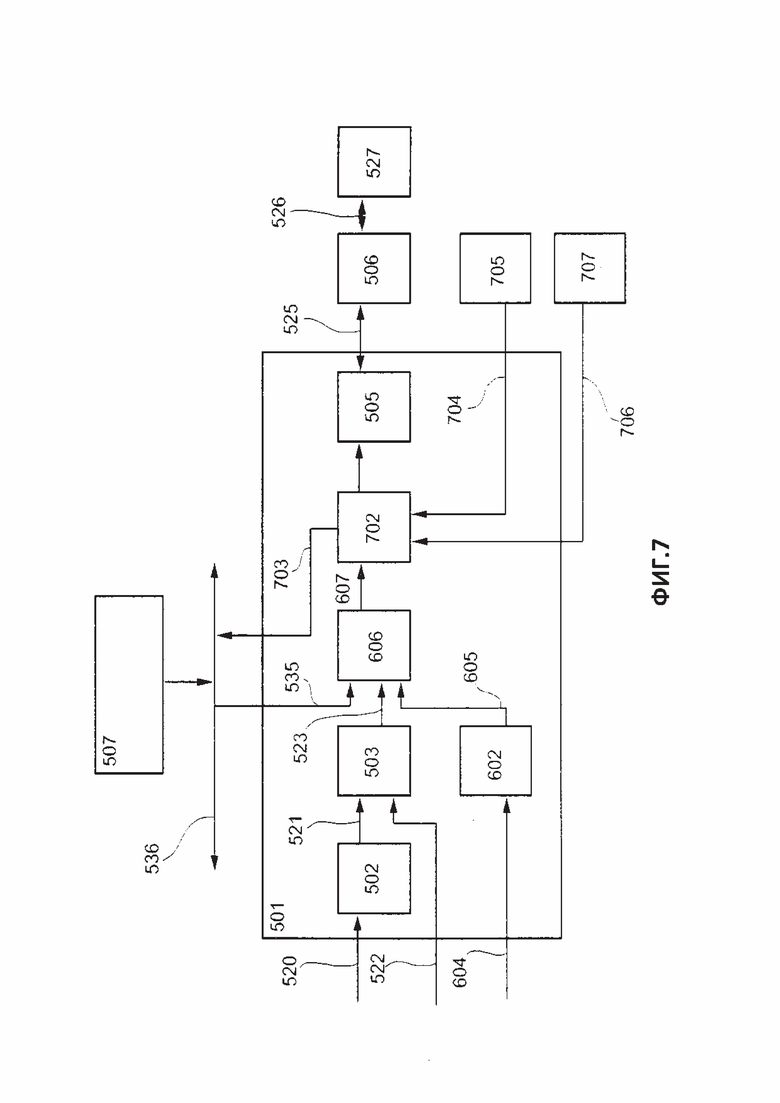
- Фигура 7 иллюстрирует третий вариант осуществления изобретения модуля аварийного торможения; и
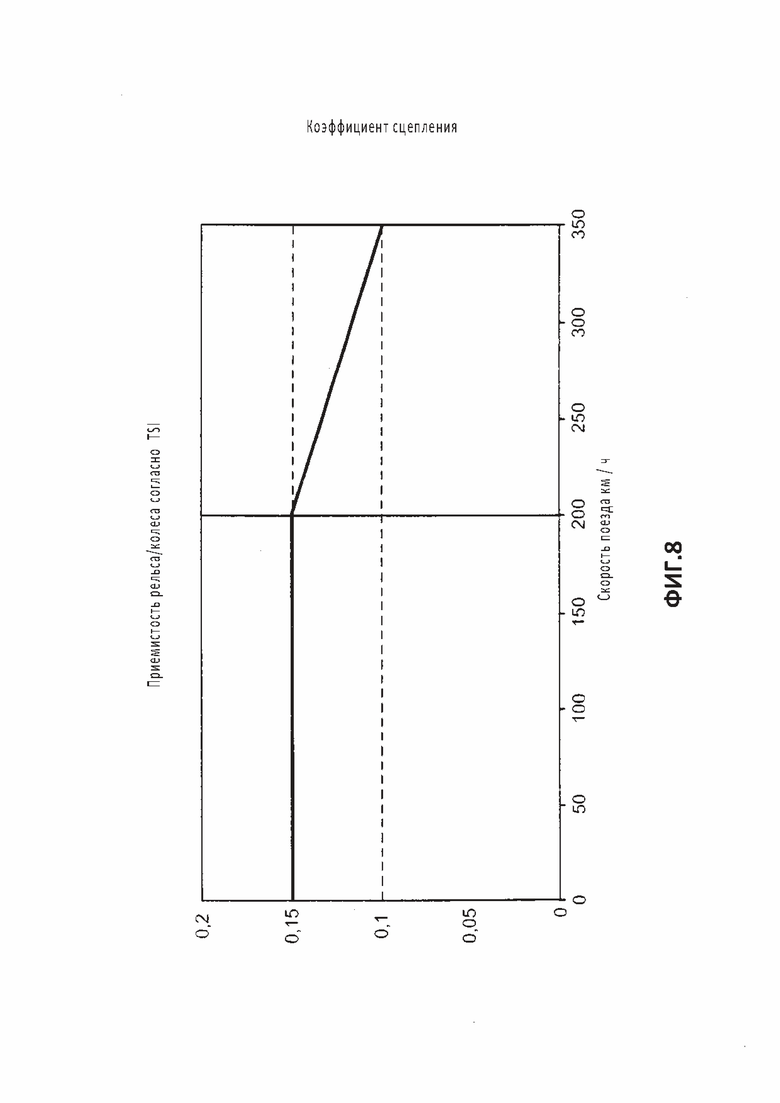
- Фигура 8 качественно иллюстрирует кривую уровня сцепления между колесом и рельсом в соответствии с коэффициентом сцепления и скоростью транспортного средства.
Осуществление изобретения
Перед детальным объяснением ряда вариантов осуществления изобретения следует разъяснить, что изобретение не ограничивается в своем применении деталями конструкции и конфигурацией компонентов, представленных в следующем описании или проиллюстрированных на чертежах. Изобретение может предполагать другие варианты осуществления, либо достигаться существенно разными способами. Также следует понимать, что фразеология и терминология используют с описательной целью и их не следует толковать в качестве ограничивающих. Использование терминов «включать в себя» и «содержать» и их вариаций необходимо понимать как охватывание элементов, указанных далее по тексту, и их эквивалентов, а также дополнительных элементов и их эквивалентов.
В тексте настоящего описания термин «модуль», в предпочтительном варианте осуществления изобретения, обозначает модуль, который может быть реализован с помощью электронной архитектуры аппаратного-программного обеспечения, термин «подмодуль», в предпочтительном варианте осуществления изобретения, указывает подмодуль, в пределах которого функции могут достигаться по очереди, через программное обеспечение или через аппаратное обеспечение, управляемое упомянутым программным обеспечением. Программное обеспечение может быть выполнено, например, микропроцессорами или программируемыми пользователем вентильными матрицами (ППВМ).
На Фигурах линии, соединяющие разные подмодули в пределах модуля, необходимо понимать предпочтительно как электрические сигналы или программные переменные.
Электронная система управления аварийного и служебного торможения 500 для транспортного средства, в частности, для железнодорожного транспорта, в соответствии с настоящим изобретением, отличается тем, что она включает в себя аварийный тормозной модуль 501 (ТОРМОЗНОЙ МОДУЛЬ БЕЗПАСНОСТИ) и служебный тормозной модуль 507 (СЛУЖЕБНЫЙ ТОРМОЗНОЙ МОДУЛЬ), каждый из которых включает в себя электронную архитектуру, выполненную с возможностью образовывать значение давления торможения, при этом упомянутые электронные архитектуры независимы и отделены друг от друга.
Служебный тормозной модуль 507 выполнен с возможностью получения, по меньшей мере, одного сигнала команды замедления/служебного торможения 530 и формирования соответствующего сигнала давления служебного торможения 535. Аварийный тормозной модуль 501 соединен с упомянутым служебным тормозным модулем 507 каналом связи 536 для получения упомянутого сигнала давления служебного торможения 535.
Упомянутый аварийный тормозной модуль 501 выполнен с возможностью получения, по меньшей мере, одного сигнала, обозначающего команду аварийного торможения и формирования соответствующего промежуточного сигнала давления торможения, указывающего на аварийное торможение 523.
Также аварийный тормозной модуль 501 обеспечивает возможность формирования контрольного сигнала давления торможения 524, соответствующего более высокому значению между сигналом давления служебного торможения 535 и промежуточным сигналом давления торможения, указывающим на аварийное торможение 523, а также преобразование упомянутого контрольного сигнала давления торможения 524 в давление торможения путем управления электропневматического привода 506.
В первом варианте осуществления изобретения, показанном на Фигуре 5, служебный тормозной модуль 507 включает в себя подмодуль для расчета давления аварийного торможения 508, который получает команду аварийного торможения или замедления 530, формируемую, например, рукояткой тормозного крана (КОМАНДА РУКОЯТКИ ТОРМОЗНОГО КРАНА) через команду служебного торможения/замедления 530, и весом транспортного средства (ВЕС) через первый сигнал веса 522.
Первый сигнал веса 522 является, например, но не исключительно, приобретенным значением давления, исходящего от подвесок, или электрическим напряжением, полученным от датчика положения каретки относительно тележки.
Расчетный подмодуль давления служебного торможения 508 в режиме реального времени выполняет расчет значения давления, необходимого для служебного торможения в ответ на упомянутую команду служебного торможения/замедления 530, и формирует соответствующий сигнал давления служебного торможения 535, имеющий значение, соответствующее значению давления, необходимому для рассчитанного служебного торможения.
Значение давления, необходимое для служебного торможения получают путем объединения, например, но не исключительно, упомянутого первого сигнала команды служебного торможения/замедления 530 и упомянутого первого сигнала веса 522 посредством соответствующей функции, известной специалистам в данной области техники и аналогичной изображенной на Фигуре 2.2.
Второй сигнал команды служебного торможения/замедления 531, исходящих из TCMS 532, также может передаваться к подмодулю для расчета давления служебного торможения 508 подмодулем связи 509.
Подмодуль связи 509 обеспечивает управление всеми коммуникационными протоколами для подвижного состава, например, но не исключительно, к TCMS 532 и системе тяги 533.
Могут быть и другие подмодули, включенные в контрольный щит 510. Например, но не исключительно, подмодули входом/выходом, управления и хранения информации о диагностике 534 и управления дисплеем, подмодули для связи с инструментами диагностики и другие подмодули, не связанные с аварийным торможением, обычно известные специалистам в данной области техники.
Канал связи 536, неважно то ли проводного, то ли беспроводного типа, используется служебным тормозным модулем 507 и аварийным тормозным модулем 501 для взаимного обмена информацией.
Канал связи 536 может быть либо точечным, либо общим с дополнительными модулями, не обязательно предназначенными для функций торможения транспортного средства. Упомянутые дополнительные модули не показаны на Фиг. 5.
Канал связи 536 может, например, формироваться шиной.
Информация, в частности, сигнал давления служебного торможения 535, передается от служебного тормозного модуля 507 к аварийному тормозному модулю 501, например, но не исключительно, в соответствии с понятием «черного канала», как указано в европейском стандарте «EN50159: Применение для железнодорожного транспорта. Системы связи, сигнализации и обработки. Связанная с безопасностью передача в системах передачи данных». Канал связи 536 также может реализовываться посредством аппаратных аналоговых линий, например, но не исключительно, в виде напряжения или тока, или широтно-импульсной модуляции, либо посредством цифрового кодирования по нескольким проводам.
В аварийном тормозном модуле 501 расчетный подмодуль первой функции передачи 502 получает, по меньшей мере, один сигнал, указывающий на команду аварийного торможения.
В этом варианте осуществления изобретения, по меньшей мере, один сигнал, указывающий на команду аварийного торможения, является сигналом пневматического торможения 520, указывающим на контрольное давление тормозной системы транспортного средства, например, надлежаще приобретенный сигнал давления, соответствующий значению давления тормозного воздухопровода (обозначенного под числом 101 на Фигуре 1), диапазон которого включает, по меньшей мере, одно значение, соответствующее аварийному торможению.
Например, значение, соответствующее аварийному торможению, может быть значением, которое превышает установленное пороговое значение. Термин «превышает» может указывать как на случай, в котором значение выше установленного порогового значения, так и на случай, в котором значение ниже установленного порогового значения.
Расчетный подмодуль первой функции передачи 502 обеспечивает расчет функции передачи кривой, показанной на Фигуре 2.1, функционально имитируя распределительный клапан 104, включающий в себя подфункции, известные специалистам в данной области техники как уравнительный резервуар и соответствующие действия относительно перегрузки или сброса.
Таким образом, расчетный подмодуль первой функции передачи 502 выдает сигнал давления 521 распределительного клапана, допустимое значение которого может соответствовать значению давления от 0 до 3,8 бар в соответствии с имитацией распределительного клапана 104.
Упомянутый сигнал давления 521 распределительного клапана подается в подмодуль для расчета второй функции передачи 503 вместе со вторым сигналом веса 528 транспортного средства (ВЕС), соответствующим значению полученного веса транспортного средства.
Сигнал давления тормозной магистрали и второй сигнал веса 528 транспортного средства получают в соответствии с процессами уровня SIL ≥ 3, например, но не исключительно, по резервным и взаимно диагностируемым каналам и датчикам.
В другом варианте осуществления изобретения второй сигнал веса 528 транспортного средства может передаваться по каналу связи 536 к подмодулю команды торможения/замедления 508, который использует упомянутый второй сигнал веса 528 транспортного средства вместо получения первого сигнала веса 522.
Расчетный модуль второй функции передачи 503 обеспечивает расчет функции передачи кривой, показанной на Фигуре 2.2, имитируя двухрежимный клапан 105.
Выход расчетного модуля второй функции передачи 503 является промежуточным сигналом давления торможения, указывающим на аварийное торможение 523, который представляет допустимое значение давления пневматического торможения, направляемого в тормозной цилиндр в результате выполнения торможения путем модуляции сигналов давления тормозного воздухопровода. Диапазон значений сигнала давления тормозного воздухопровода может включать значение, соответствующее значению аварийного торможения. Упомянутое значение, в предпочтительном варианте осуществления изобретения, представлено максимальным значением, достигаемым при аварийном торможении, т.е. при промежуточном сигнале давления торможения, указывающем на аварийное торможение 523.
Двухвходной подмодуль выбора высокого давления 504 получает на входе промежуточный сигнал давления торможения, указывающий на аварийное торможение 523, создаваемый расчетным подмодулем второй функции передачи 503, и сигнал давления служебного торможения 535, соответствующий значению давления служебного торможения, создаваемый расчетным подмодулем давления служебного торможения 508 в пределах служебного тормозного модуля 507.
Двухвходной подмодуль выбора высокого давления 504 выполняет функцию выбора высокого значения, формирующую на выходе сигнал, имеющий более высокое допустимое значение давления между сигналом давления служебного торможения 535 и промежуточным сигналом давления торможения, указывающим на аварийное торможение 523, которое может приобретать значение, соответствующее аварийному торможению. Упомянутое значение, соответствующее аварийному торможению, в предпочтительном варианте осуществления изобретения представлено максимальным значением, которое достигается при пневматическом торможении.
Контрольный сигнал давления торможения 524, т.е. более высокое значение между сигналом давления служебного торможения 535 и промежуточным сигналом давления торможения, указывающим на аварийное торможение 523, передается затем в подмодуль управления давлением 505, который обеспечивает управление электропневматическим приводом 506 через соответствующие двунаправленные электрические сигналы 525, преобразовывая вход контрольного сигнала давления торможения 524 к модулю 505 во вход фактического давления к тормозному цилиндру 527.
Неисключительный пример пары, формируемой подмодулем управления давлением 505 и электропневматическим приводом 506, описывается в патенте WO201675642.
Специалист в данной области техники понимает дополнительные элементы, являющиеся типичными для тормозной системы железнодорожного транспорта, связанные с электропневматическим приводом 506, такие как вспомогательные резервуары или препятствующие скольжению системы управления, не показанные на Фигуре 5, так как они непосредственно не связаны с содержанием настоящего изобретения.
Предлагаемое решение подчеркивает функциональную и решающую независимость аварийного тормозного модуля 501 от служебного тормозного модуля 507.
Если аварийный тормозной модуль 501 разработан в соответствии с критериями SIL ≥ 3, вероятность того, что команда пневматического торможения, включающая в себя, по меньшей мере, один сигнал, указывающий на команду аварийного торможения, соответствующий максимальному значению пневматического торможения, не применяется к тормозному цилиндру 527, снижается в пределах общепринятых стандартов для эквивалентной традиционной пневматической системы с меньшими затратами и более высокой точностью.
Также независимо от типа аппаратной или программной ошибки, которая может возникнуть в служебном тормозном модуле 507, двухвходной подмодуль выбора высокого давления 504 аварийного тормозного модуля 501 в любом случае создаст команду более высокого торможения на входе модуля, т.е. всегда приводит всю систему в безопасное состояние.
Таким образом, это решение обеспечивает разработку служебного тормозного модуля 507 в соответствии с уровнями безопасности SIL ≤ 2, так как это случай состояния техники, который не предполагает увеличения затрат на разработку и периодических производственных затраты, при этом сохраняя эксплуатационные качества.
Фигура 6 иллюстрирует второй вариант осуществления изобретения аварийного тормозного модуля 501. Аварийный тормозной модуль 501, полностью разработанный в соответствии с критериями SIL ≥ 3, повторяет, по меньшей мере, часть изложенного по предыдущему варианту осуществления изобретения, но также включает подмодуль распределения предварительно установленного давления аварийного торможения 602. Подмодуль распределения предварительно установленного давления аварийного торможения 602 получает на входе второй сигнал, указывающий на команду аварийного торможения. В этом варианте осуществления изобретения вторым сигналом, указывающим на команду аварийного торможения, является сигнал 604, указывающий на команду аварийного торможения, исходящий, например, но не исключительно, из аварийного электрического контура.
Аварийный электрический контур, например, указывает на электрическую цепь, которая может определять состояние необходимости аварийного торможения и, следовательно, формировать сигнал 604, указывающий на команду аварийного торможения.
В случае аварийной команды, оповещенной сигналом 604, указывающим на команду аварийного торможения и исходящим из аварийного электрического контура, подмодуль распределения предварительно установленного давления аварийного торможения 602 применяет допустимое установленное значение давления для соответствующего сигнала давления аварийного торможения 605.
Вместо двухвходного подмодуля выбора высокого значения 504 используется трехвходной подмодуль выбора высокого значения 606, который выполняет функцию выбора высокого значения, формируя на выходе сигнал, имеющий более высокое значение из сигнала давления служебного торможения 535, сигнала давления аварийного торможения 605 от аварийного электрического контура и промежуточного сигнала давления торможения, указывающего на аварийное торможение 523.
Максимальное значение промежуточного сигнала давления торможения, указывающего на аварийное торможение 523, соответствует аварийному торможению.
Контрольный сигнал давления торможения 607, исходящий из трехвходного подмодуля выбора высокого значения давления 606, т.е. наивысшее значение из трех допустимых сигналов давления 535, 523 и 605, передается затем на выходе в подмодуль управления давлением 505, который обеспечивает управление электропневматическим приводом 506 через соответствующие двунаправленные электрические сигналы 525, преобразовывая вход контрольного сигнала допустимого давления торможения 607 к модулю 505 во вход фактического давления к тормозному цилиндру 527.
Разные сочетания могут создаваться с помощью подмодулей аварийного тормозного модуля 501, например, модулируя значение сигнала давления аварийного торможения 605 со значением сигнала веса 528 транспортного средства с помощью второго подмодуля для расчета второй функции передачи 503 перед направлением упомянутого значения сигнала давления аварийного торможения 605 в трехвходной подмодуль выбора высокого значения 606.
В непроиллюстрированном другом варианте осуществления изобретения, по меньшей мере, один сигнал, указывающий на команду аварийного торможения, может являться одним и только одним сигналом 604, указывающим на команду аварийного торможения, исходящим, например, но не исключительно, от аварийного электрического контура.
В дополнительном неисключительном варианте осуществления изобретения, аварийный тормозной модуль 501 не может использовать сигнал давления тормозного воздухопровода, а только сигнал давления аварийного торможения 605, модулируемый или немодулируемый сигналом веса 528.
Расширенное описание проиллюстрированного на Фигуре 5 и Фигуре 6 представлено на Фигуре 7, в котором при аварийном торможении используется электродинамический регенеративный тормоз.
Управление тяговым усилием на данный момент состоит из преобразователей на базе ЦСП-архитектуры (цифровых сигнальных процессоров), которая не подходит для разработки согласно критериям SIL ≥ 3.
Таким образом, невозможно прямо передать команду аварийного торможения в тяговые системы, если управление тяговым усилием постоянно не контролируется системой SIL ≥ 3 во время аварийного торможения.
Фигура 7 иллюстрирует третий вариант осуществления изобретения аварийного тормозного модуля 501, полностью разработанного в соответствии с критериями SIL ≥ 3.
Разрешающий подмодуль 702 выполняет функции, аналогичные двухвходному подмодулю выбора высокого давления 504 или трехвходному подмодулю выбора высокого значения давления 606, изображенным на Фигуре 5 и Фигуре 6, соответственно.
Разрешающий подмодуль 702 имеет функцию принятия решения относительно того, достигается ли контрольный сигнал давления торможения 607, исходящий из трехвходного подмодуля выбора высокого значения давления 606, пневматическим способом подмодулем управления давлением 505 и подмодулем электропневматического привода 506 или необходимо соответствующее преобразование в сигнал команды тормозного момента 703 и направление в тяговые системы (не показаны) непосредственно через канал связи 536 или путем подачи через служебный тормозной модуль 507.
Разрешающий подмодуль 702 получает постоянную информацию о значении сигнала тормозного момента электродвигателей 704, обнаруженного соответствующим датчиком крутящего момента 705. Датчик крутящего момента 705, состоящий, например, но не исключительно, из трансформаторов для измерения тока, вырабатываемого регенерирующими электродвигателями, или фактических преобразователей крутящего момента за электродвигателями, разработан согласно критериям SIL ≥ 3, например, с помощью резервных и взаимно диагностируемых каналов.
Таким образом, полный путь между измерением электродвижущего тормозного момента перед датчиком крутящего момента 705 до решения, принятого разрешающим подмодулем 702 относительно управления тормозным моментом, соответствует требованиям SIL ≥ 3.
При наличии контрольного сигнала давления торможения 607, исходящего из трехвходного подмодуля выбора высокого значения давления 606, разрешающий подмодуль 702 передает соответствующую команду момента в тяговую систему, измеряет фактический отклик с помощью датчика крутящего момента 705 и, если полученное значение меньше требуемого, незамедлительно обеспечивает компенсацию недостающего количества, направляя команду в подмодуль управления давлением 505 и подмодуль электропневматического привода 506.
Другими словами, аварийный тормозной модуль 501 формирует тормозной момент путем направления команды электродинамического тормозного момента, постоянного контроля электродинамического тормозного момента с помощью упомянутого датчика крутящего момента 705 и компенсирует возможную частичную или полную нехватку электродинамического тормозного момента, создавая пневматический тормозной момент.
Таким образом, проиллюстрированное решение обеспечивает управление и применение аварийного торможения, соответствующего уровню SIL ≥ 3, частично или полностью, через регенеративную электродинамическую тормозную систему, независимо от того, что упомянутая регенеративная электродинамическая тормозная система и системы, через которые подмодуль передает сигнал команды тормозного момента 703 в тяговые системы, разработаны согласно критериям SIL ≤ 2.
Также дается описание дополнительного варианта осуществления изобретения, выполненного с возможностью управления аварийным торможением в условиях высокой скорости.
Известно, что уровень сцепления между колесом и рельсом снижается при увеличении скорости согласно закону, качественно обозначенному на Фигуре 8.
Сигнал скорости транспортного средства 706, полученный по каналу SIL ≥ 3, например, но не исключительно, с помощью датчика скорости 707 вращения резервных и взаимнодиагностируемых колес, получает разрешающий подмодуль 702, который обеспечивает ограничение команды электродинамического тормозного момента и/или давления торможения согласно кривой на Фигуре 8, предварительно преобразованной в разрешающий подмодуль 702.
Таким образом, аварийный тормозной модуль 501 может корректировать давление торможения, так как сцепление транспортного средства изменяется в соответствии со скоростью транспортного средства.
Специалист в данной области техники знает, что модуль, связанный со служебным торможением, во всех возможных вариантах осуществления изобретения может быть реализован в устройстве TCMS и подключен к аварийному тормозному модулю через канал связи 536.
Специалист в данной области техники дополнительно знает, что система привода может быть скорее гидравлического, чем пневматического типа.
Например, но не обязательно, служебный тормозной модуль 507 успешно выполняется в других бортовых железнодорожных системах.
Также аварийный тормозной модуль 501 может содержать более одной группы, включающей в себя подмодуль управления давлением 505 и электропневматический привод 506 для независимого управления несколькими тормозными цилиндрами в соответствии с характерной архитектурой транспортного средства.
В ранее рассмотренных вариантах осуществления изобретения аварийный тормозной модуль 501 может разрабатываться в соответствии с требованиями EN50128 SIL ≥ 3 и EN50129 SIL ≥ 3, а служебный тормозной модуль 507 - в соответствии с требованиями EN50128 SIL 2 ≤ и EN50129 SIL ≤ 2.
Было дано описание различных аспектов и вариантов осуществления изобретения системы и способа моделирования контакта между колесом и рельсом 1 в соответствии с настоящим изобретением. Подразумевается, что каждый вариант осуществления изобретения может быть объединен с любым другим вариантом осуществления изобретения. Также изобретение не ограничивается рассмотренными вариантами осуществления изобретения, а может изменяться в объеме, определенном в прилагаемой формуле изобретения.
Предложена электронная система управления аварийного и служебного торможения (500), содержащая аварийный тормозной модуль (501) и служебный тормозной модуль (507), каждый из которых включает в себя независимую и отделенную электронную архитектуру. Служебный тормозной модуль (507) получает сигнал команды замедления/служебного торможения (530) и формирует сигнал давления служебного торможения (535). Аварийный тормозной модуль (501) подсоединен к служебному тормозному модулю (507) для получения сигнала давления служебного торможения (535), получает сигнал, обозначающий команду аварийного торможения, формирует соответствующий промежуточный сигнал давления торможения, указывающий на аварийное торможение (523), формирует сигнал, соответствующий более высокому значению между сигналом давления служебного торможения (535) и промежуточным сигналом давления торможения, указывающим на аварийное торможение (523), который преобразовывается в давление торможения. Достигается повышение надежности. 14 з.п. ф-лы, 9 ил.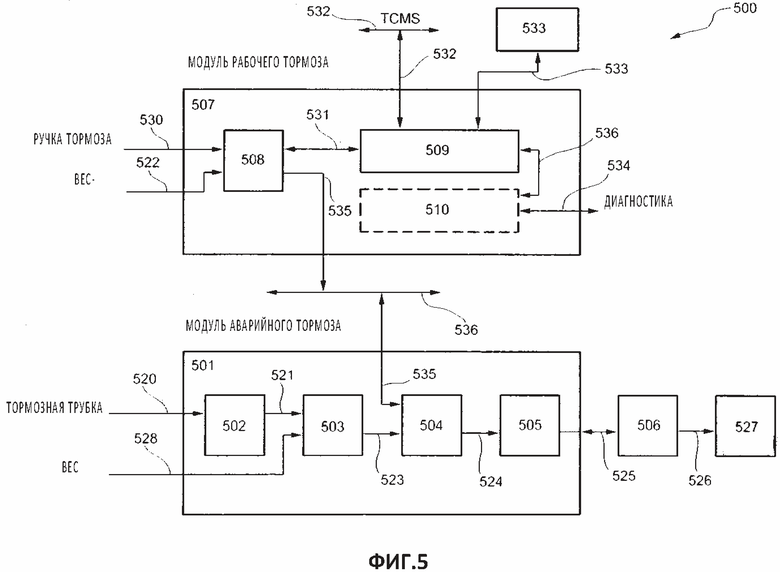
1. Электронная система управления аварийным и служебным торможением (500) для транспортного средства, в частности, для железнодорожного транспорта, отличающаяся тем, что она включает в себя аварийный тормозной модуль (501) и служебный тормозной модуль (507), каждый из которых включает в себя электронную архитектуру, выполненную с возможностью образовывать значение давления торможения, при этом упомянутые электронные архитектуры независимы и отделены друг от друга;
служебный тормозной модуль (507), выполненный с возможностью получения, по меньшей мере, одного сигнала команды замедления/служебного торможения (530) и формирования соответствующего сигнала давления служебного торможения (535);
аварийный тормозной модуль (501) соединенный с упомянутым служебным тормозным модулем (507) каналом связи (536) для получения упомянутого сигнала давления служебного торможения (535);
аварийный тормозной модуль (501), выполненный с возможностью получения, по меньшей мере, одного сигнала, обозначающего команду аварийного торможения и формирования соответствующего промежуточного сигнала давления торможения, указывающего на аварийное торможение (523);
упомянутый аварийный тормозной модуль (501), выполненный с возможностью формирования контрольного сигнала давления торможения (524), соответствующего более высокому значению между сигналом давления служебного торможения (535) и промежуточным сигналом давления торможения, указывающим на аварийное торможение (523), а также преобразования упомянутого контрольного сигнала давления торможения (524) в давление торможения путем управления электропневматического привода (506 ).
2. Электронная система управления аварийным и служебным торможением по п. 1, в которой, по меньшей мере, один сигнал, указывающий на команду аварийного торможения, является сигналом пневматического торможения (520), указывающим на контрольное давление тормозной системы транспортного средства, из которого, по меньшей мере, одно значение указывает на состояние аварийного торможения.
3. Электронная система управления аварийным и служебным торможением по п. 1 или 2, в которой, по меньшей мере, один сигнал, указывающий на команду аварийного торможения, является сигналом (604), исходящим из аварийного электрического контура.
4. Электронная система управления аварийным и служебным торможением по п. 1, в которой аварийный тормозной модуль (501) разработан в соответствии с требованиями EN50128 SIL ≥ 3 и EN50129 SIL ≥ 3.
5. Электронная система управления аварийным и служебным торможением по п. 1, в которой служебный тормозной модуль (507) разработан в соответствии с требованиями EN50128 SIL ≤ 2 и EN50129 SIL ≤ 2.
6. Электронная система управления аварийным и служебным торможением по п. 1, в которой аварийный тормозной модуль (501) модулирует, по меньшей мере, один сигнал, указывающий на команду аварийного торможения, с сигналом веса (522) транспортного средства.
7. Электронная система управления аварийным и служебным торможением по п. 1, в которой служебный тормозной модуль (507) модулирует сигнал команды замедления/служебного торможения с сигналом веса (522) транспортного средства.
8. Электронная система управления аварийным и служебным торможением по п. 1, в которой служебный тормозной модуль (507) реализован в устройстве систем контроля, диагностики и управления подвижного состава.
9. Электронная система управления аварийным и служебным торможением по п. 1, в которой аварийный тормозной модуль (501) соединен с датчиком крутящего момента (705) электродинамического торможения.
10. Электронная система управления аварийным и служебным торможением по п. 9, в которой упомянутый датчик крутящего момента (705) электродинамического тормозного момента и принцип его управления разработан в соответствии с требованиями EN50128 SIL ≥ 3 и EN50129 SIL ≥ 3.
11. Электронная система управления аварийным и служебным торможением по п. 9 или 10, в которой упомянутый аварийный тормозной модуль (501) формирует тормозной момент путем направления команды электродинамического тормозного момента, постоянного контроля электродинамического тормозного момента с помощью упомянутого датчика крутящего момента (705) и компенсирует нехватку электродинамического тормозного момента, создавая пневматический тормозной момент.
12. Электронная система управления аварийным и служебным торможением по п. 1, в которой аварийный тормозной модуль (501) корректирует давление торможения в соответствии со сцеплением, доступным в функции скорости транспортного средства.
13. Электронная система управления аварийным и служебным торможением (500) по п. 1, в которой канал связи (536) является беспроводным каналом.
14. Электронная система управления аварийным и служебным торможением (500) по п. 1, в которой упомянутый канал связи (536) образуется шиной.
15. Электронная система управления аварийным и служебным торможением (500) по п. 1, в которой упомянутый канал связи (536) реализуется посредством аппаратных линейных решений.
| WO 2013144543 A2, 03.10.2013 | |||
| US 5738417 A, 14.04.1998 | |||
| AU 5272598 A, 06.08.1998. |

