ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к области медицинской техники в сфере протезирования и биоэлектрического протезирования, а именно к протезированию верхних конечностей. В частности, настоящее изобретение описывает техническое решение, описывающее способ управления механизмом схвата биоэлектрического односхватового протеза для пользователя-ребенка со степенью ампутации от пальцев до предплечья.
ГЛОССАРИЙ
Односхватовый биоэлектрический протез - искусственная замена ампутированной или поврежденной части тела, управляемая посредством различных механизмов и предназначенная для выполнения специальных действий и/или воссоздания внешнего вида конечности пользователя, оснащенная как минимум одним мотором, который в своей работе обеспечивает схват.
Схват - смыкание-размыкание пальцев кисти.
Пользователь - лицо или объект, которое использует протез для выполнения конкретной функции.
УРОВЕНЬ ТЕХНИКИ
Детское протезирование - одно из наиболее важных направлений реабилитации человека. Физиологический рост и развитие ребенка влияют на непрерывные изменения его организма, в том числе в части костного скелета и мышечной системы верхних конечностей. Указанные изменения происходят быстрее, чем у взрослого человека, что влечет необходимость регулярного (раз в год и чаще) приобретения замены протеза для ребенка, вследствие этого в детском протезировании не принято использовать высокие технологии, увеличивающие стоимость конечного устройства и расходы по его содержанию для домохозяйства, по аналогии с протезами для взрослого человека. Вместе с тем, для адекватного развития ребенка и его эффективной реабилитации используемые при протезировании технические решения должны быть передовыми, чтобы способствовать всестороннему развитию ребенка.
Как показывают международные исследования (например, публикация М. Egermann, М. Thomsen «Myoelektrische Prothesen bei Kindern im Kindergartenalter» // Der  February 2003, Volume 32, Issue 2, pp. 164-169. URL: https://link.springer.com/article/10.1007%2Fs00132-002-0431-9/), чем раньше пользователь начинает использовать протез верхней конечности, тем быстрее и проще проходит его реабилитация, следовательно тем выше шанс, что протез будет использоваться в дальнейшем и способствовать жизнедеятельности пользователя как полноценного члена общества.
February 2003, Volume 32, Issue 2, pp. 164-169. URL: https://link.springer.com/article/10.1007%2Fs00132-002-0431-9/), чем раньше пользователь начинает использовать протез верхней конечности, тем быстрее и проще проходит его реабилитация, следовательно тем выше шанс, что протез будет использоваться в дальнейшем и способствовать жизнедеятельности пользователя как полноценного члена общества.
На данный момент некоторые производители предлагают образцы детских биоэлектрических протезов (примеры: Ottobok, Variety Ability Systems, Inc.). Одна из сложностей при изготовлении детского протеза состоит в поиске оптимального веса и габаритов протеза, подходящего не только для ребенка подросткового возраста (11-8 лет), но и младшего школьного возраста (7-11 лет), дошкольного возраста (3-7 лет) и даже преддошкольного возвраста (1-3 года). Конструкция биоэлектрического протеза для взрослого протеза сама по себе обладает большим для ребенка весом, за счет включения механизма с элементом питания, поэтому простое использование технологий, применяемых во взрослом протезировании, может навредить физическому здоровью ребенка (например, искривление позвоночника, травмы опорно-двигательного аппарата и др.). Уменьшение взрослого протеза и использование его в миниатюре также не является решением проблемы в силу дороговизны и технологических барьеров.
Важной особенностью эксплуатации детского протеза является требование о его повышенной безопасности, поскольку протез должен выдерживать большие нагрузки и учитывать поведение пользователя, который может его использовать без соблюдения инструкций по бережной эксплуатации и не только по его прямому назначению. Поэтому облегчение конструкции за счет использования более легких и менее прочных материалов или утончения материалов, используемых во взрослом протезировании, не может послужить релевантным решением.
Таким образом, физиологические особенности костного скелета и мышечной системы ребенка требуют использования простых решений, например, использование биоэлектрического односхватового протеза, выполняющего схват кистью в целом, а не пальцами по отдельности, или техническое решение, при котором только подвижные конечные части протеза, соответствующие большому, указательному и среднему пальцу, являются активными, а остальные пальцы, не задействованные в щепоти, т.е. при смыкании вместе концов подвижных конечных частей биоэлектрического протеза, заменяющих большой, указательный и средний пальцы, остаются неподвижными и/или выполнены гибкими.
Из уровня технички известны некоторые решения по детским односхватовым биоэлектрическим протезам верхних конечностей, например, «Электрическая кисть Electric Hand 2000 для детей» (URL: https://www.ottobock-export.com/ru/prosthetics/products-from-a-to-z/arm-prosthetics/electric-hand-2000-children/). Недостатками данного технического решения являются неестественная, неантропоморфная кинематическая схема схвата, а также компоновочное решение в целом, за счет размещения центра тяжести не возле части протеза, соответствующей запястью, поскольку мотор-редуктор расположен в подвижной части кисти, что является непрочным и ненадежным решением, а также может оказать негативное влияние на балансировку готового изделия.
Также из уровня техники известны патенты, описывающие технические решения, относящиеся к односхватовым биоэлектрическим протезам, предназначенным для взрослого пользователя.
Известно техническое решение «Artificial hand and drive apparatus for such hand» (патент № US 4114464 A, дата публикации: 19.09.1978), в котором два активных пальца связаны червячной передачей. Недостатком данного технического решения является использование одного червяка для приведения в действие двух червячных колес, что является решением, требующим финансовых затрат и дополнительных ресурсов при их первичной настройке, поскольку необходима регулировка сразу двух червячных пар. Помимо этого, указанное решение характеризуется использованием многоступенчатой зубчатой передачи, что требует увеличения габаритов конечного изделия и не может быть применено при изготовлении протеза для пользователя-ребенка.
Известно изобретение «Искусственная кисть» (патент № RU 2472469, дата публикации: 20.01.2013), раскрывающее устройство кисти, содержащей микроэлектропривод с винтовой передачей, обеспечивающей возможность возвратно-поступательного движения, при этом привод неподвижно соединен с основанием блока пальцев. Недостатком данного технического решения является расположение двигателя параллельно оси вращения пальцев, что затрудняет компоновку изделия при сравнительно небольшой ширине протеза, соответствующей размеру ладони пользователя-ребенка.
Из уровня техники известны также патенты, описывающие не односхватовые протезы, например, патенты № RU 2663941 и RU 2663942 на изобретения «Электромеханическая кисть» (дата публикаций: 13.08.2018), но конструкция с использованием трех двигателей не применима к детскому протезированию за счет своего веса и конфигурации, которую невозможно вписать в габаритные параметры детского биоэлектрического протеза. Двигатель в указанных решенияз расположен параллельно оси вращения пальцев, такую компоновку сложно применить при детском протезировании из-за небольшой ширины ладони пользователя-ребенка.
СУЩНОСТЬ ТЕХНИЧЕСКОГО РЕШЕНИЯ
Техническая проблема, решаемая в данном решении, состоит в необходимости расширения функциональных возможностей протезов верхних конечностей, предназначенных для пользователей-детей за счет обеспечения возможности управления малогабаритным биоэлектрическим протезом, позволяющим удерживать тяжелые предметы и фиксировать схват, в отсутствие неестественных движений локтя или плеча пользователя, при снижении конечной стоимости детского протеза.
Известные из уровня техники технические решения не обеспечивают компактную, надежную и достаточно простую конструкцию, которая могла бы быть реализована на современном уровне техники.
Технический результат патентуемого изобретения заключается в реализации антропоморфной кинематической схемы схвата с использованием по меньшей мере одного мотора или мотора-редуктора и по меньшей мере одной цилиндрической зубчатой передачей и по меньшей мере одной червячной передачей при сохранении относительно небольшой ширины протеза, соответствующей размеру ладони пользователя-ребенка, и обеспечении балансировки устройства за счет расположения центра тяжести всей конструкции ближе к запястью.
Заявленный технический результат обеспечивается за счет конструкции детского односхватового биоэлектрического протеза верхней конечности, включающего по меньшей мере один мотор или мотор-редуктор с планетарным, циклоидальным или волновым редуктором, по меньшей мере одной цилидрической зубчатой передачей, по меньшей мере одной червячной передачей и рычажным механизмом для передачи усилия на ответные элементы схвата.
Конструкция имеет корпус шириной от 45 до 65 мм, повторяющий по форме форму ладони, выполненный из легкого искусственного материала с пределом прочности больше 35 МПа, и крышку, соединенную с основанием корпуса любым стандартным способом крепления, которое, в свою очередь, соединено с узлом искусственного запястья, предназначенного для крепления к гильзе протеза.
При этом, мотор или мотор-редуктор является мотор-редуктором постоянного тока с мощностью от 3 до 7 Вт со следующими параметрами: диаметр от 10 до 20 мм, длина от 40 до 50 мм, вес от 40 до 70 г, крутящий момент мотора составляет от 0,25 до 0,6 Н*м, частота холостого хода мотора от 5000 до 30000 об/мин, передаточное отношение редуктора лежит в интервале от 50:1 до 100:1 и скреплен с фланцем, который прикреплен к основанию корпуса. Управление вращением мотора происходит с помощью платы системы управления.
Цилиндрическая зубчатая передача для изменения направления вращения с эвольвентной, круговой, циклоидальной или иной формой профиля зубьев с любым передаточным отношением. Колесо зубчатой передачи и червяк червячной передачи находятся на валу, вращающемся в подшипниках скольжения и расположенном в отверстии между главной частью корпуса и крышкой. Червяк приводит в действие червячной колесо, соединенное с подвижной конечной частью биоэлектрического протеза, заменяющей большой палец, вращающейся на оси, закрепленной в основании и крышке корпуса.
Подвижная конечная часть биоэлектрического протеза, заменяющая большой палец, имеет рычаг, выполненный из легкого искусственного материала с пределом прочности больше 35 МПа, ось которого соединяется с помощью металлической тяги с осью аналогичного рычага подвижной конечной части биоэлектрического протеза, заменяющей указательный, средний, безымянный пальца и мизинец.
При получении управляющего сигнала на смыкание подвижных конечных частей биоэлектрического протеза плата системы управления подает постоянный электрический ток на мотор-редуктор, который вращает ведущее колесо зубчатой передачи, находящееся в зацеплении с ведомым колесом зубчатой передачи, которое передает вращение на вал, на котором расположен червяк червячной передачи, который вращает колесо червячной передачи, что приводит в движение подвижные конечные части биоэлектрического протеза, обеспечивая смыкание и удержание предмета.
При получении управляющего сигнала на размыкание подвижных конечных частей биоэлектрического протеза плата системы управления подает постоянный электрический ток на мотор-редуктор, который вращает зубчатую передачу в обратную сторону, обеспечивая размыкание.
При схвате осуществляется удержание предмета за счет остановки мотора и эффекта самоторможения в червяной передаче.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Далее решение поясняется ссылками на фигуры, на которых приведено следующее:
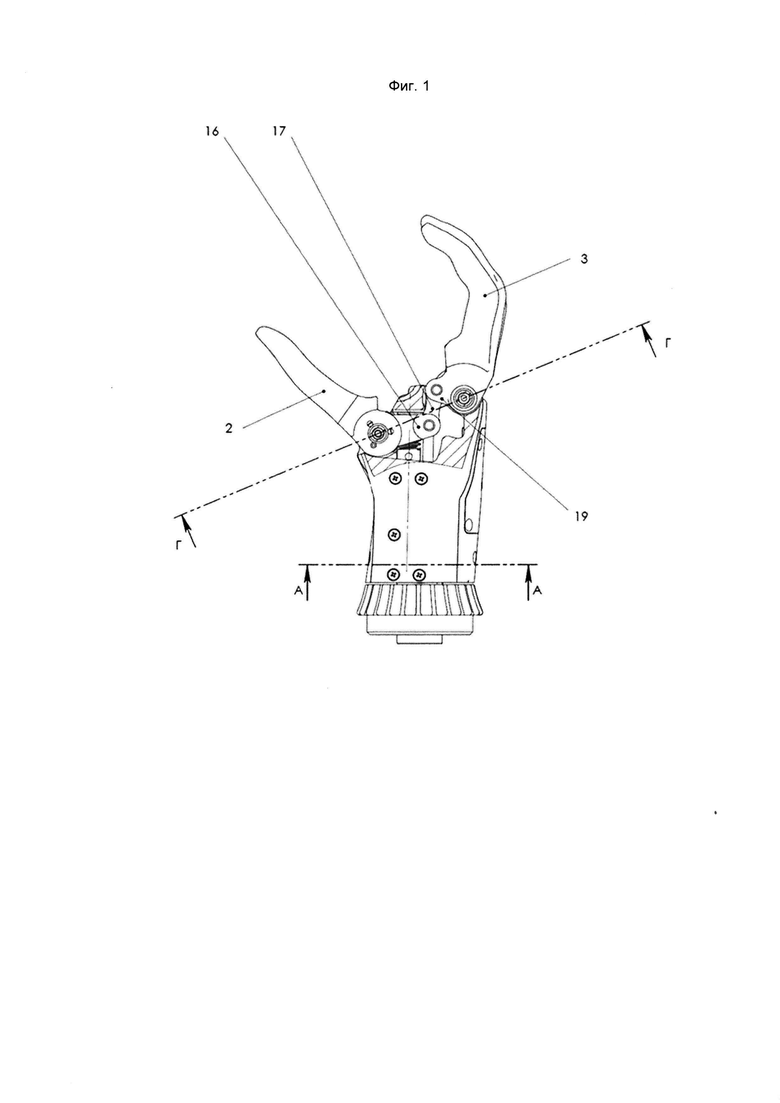
Фиг. 1 - Главный вид.
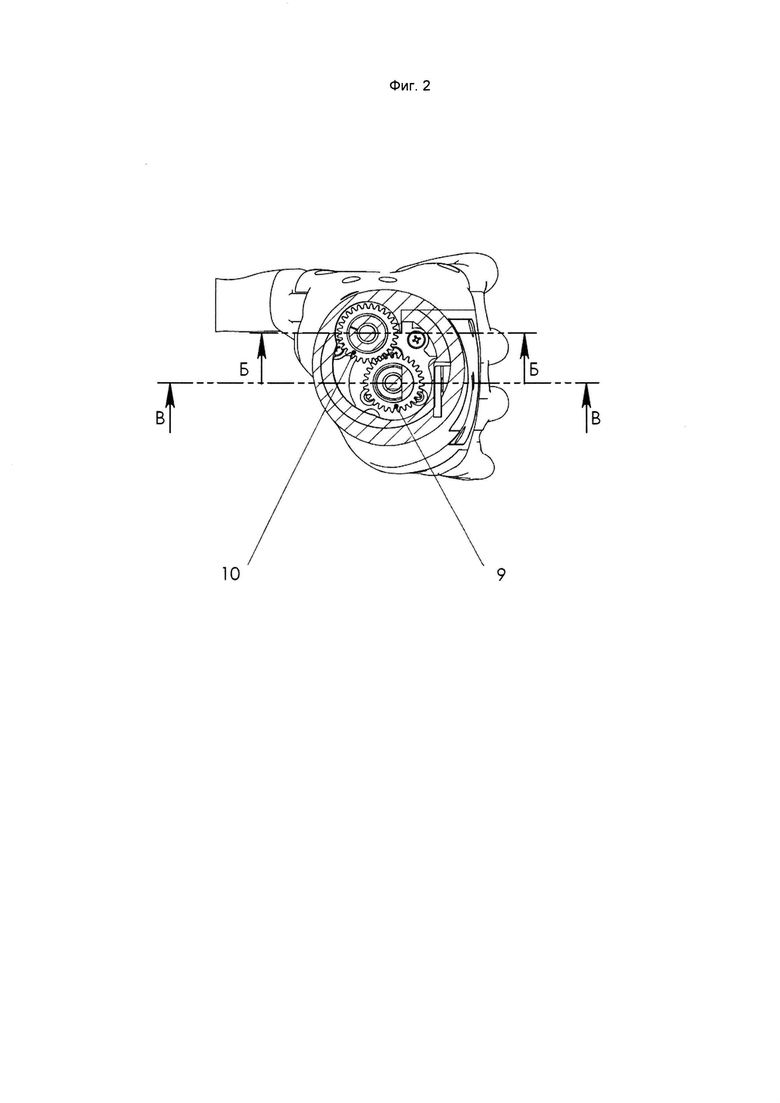
Фиг. 2 - Сечение А-А.
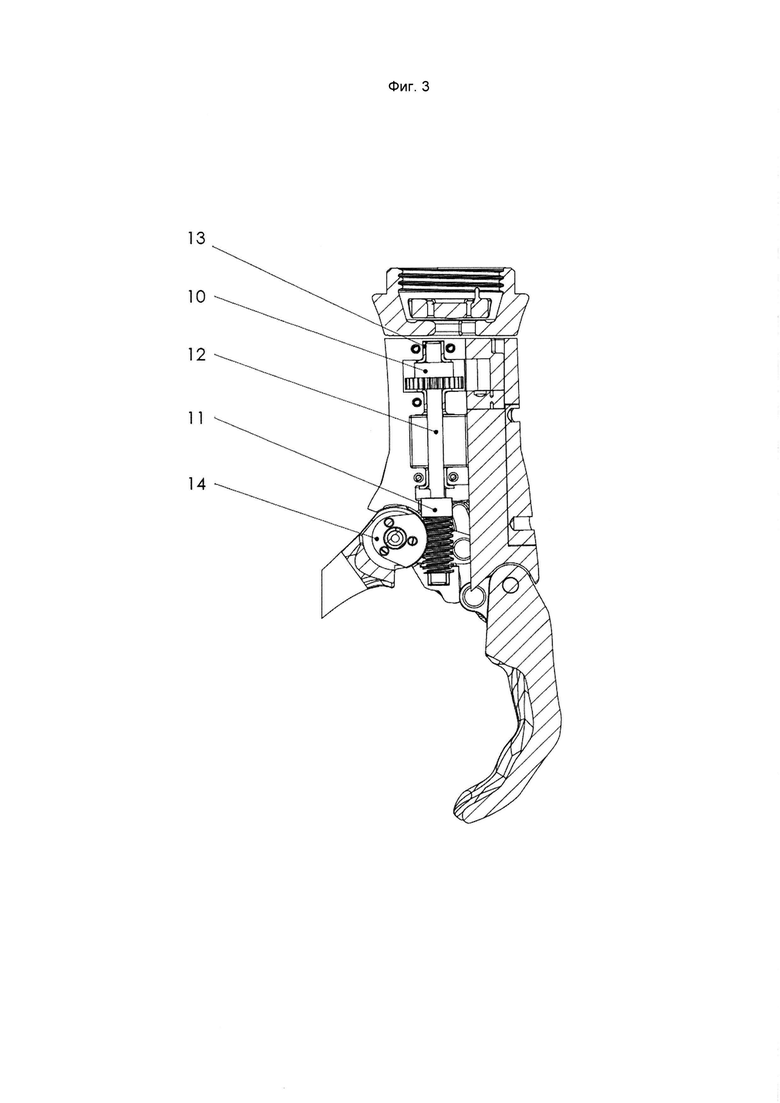
Фиг. 3 - Сечение Б-Б.
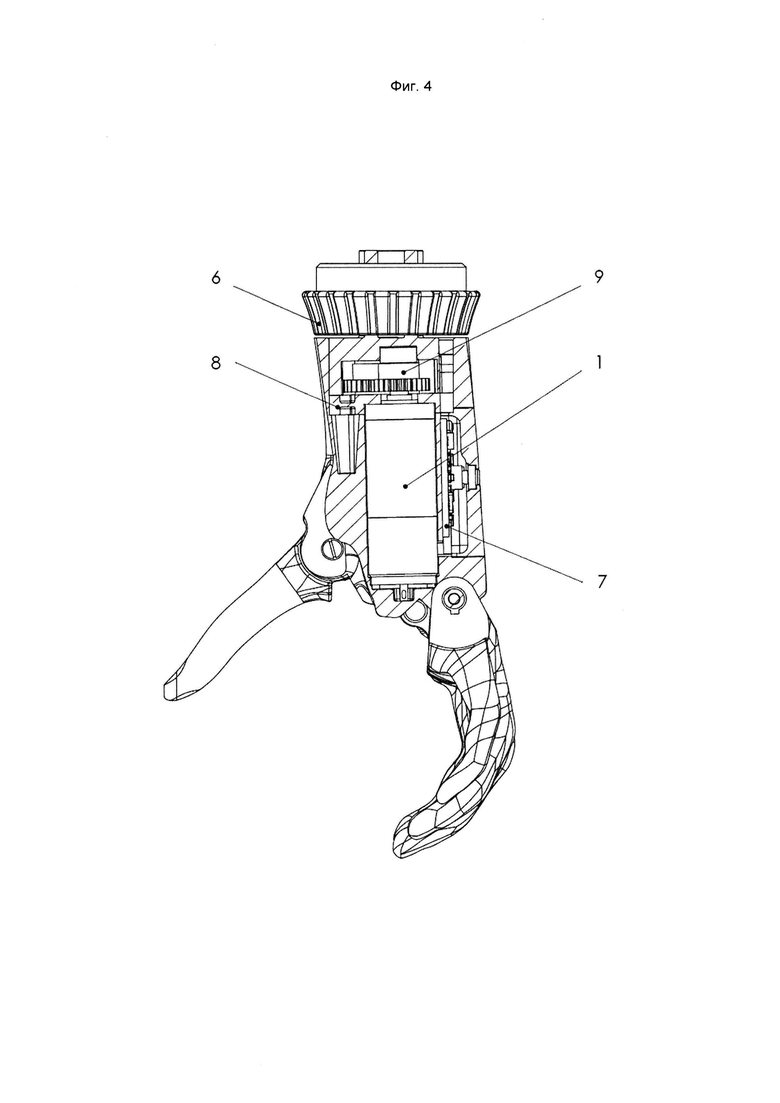
Фиг. 4 - Сечение В-В.
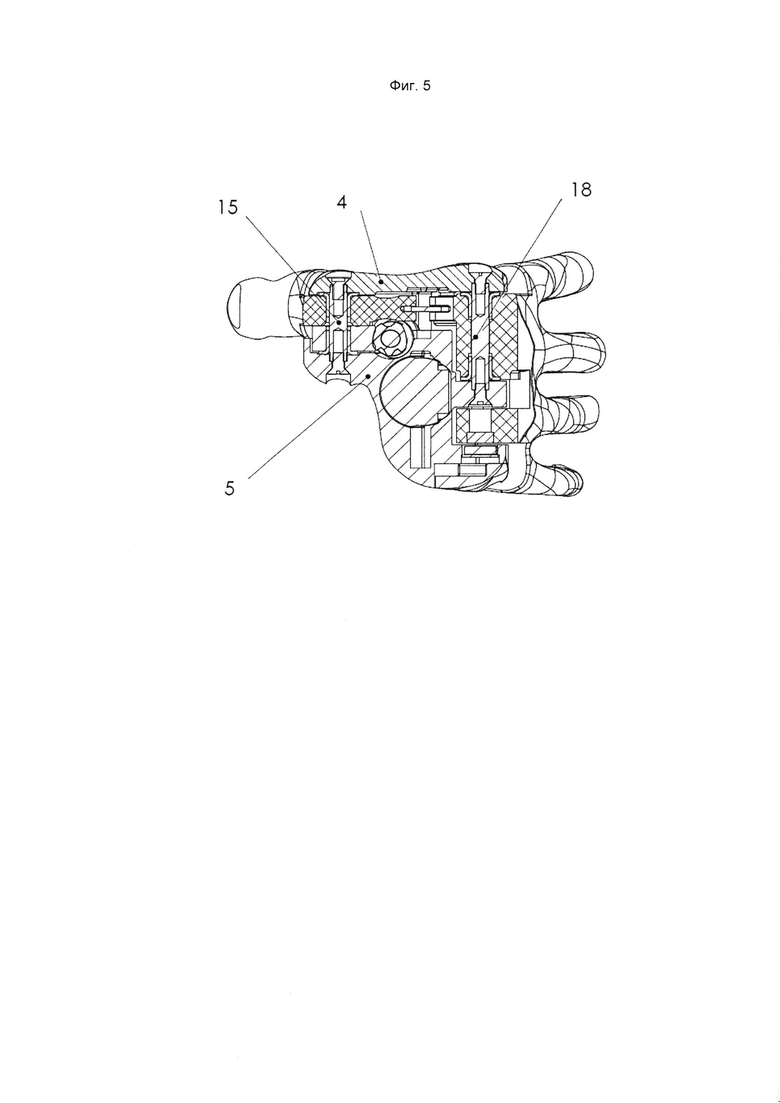
Фиг. 5 - Сечение Г-Г.
1 - мотор-редуктор; 2 - конечная часть, заменяющая большой палец; 3 - конечная часть, заменяющая указательный, средний, безымянный пальцы и мизинец; 4 - крышка корпуса; 5 - основание корпуса; 6 - узел искусственного запястья; 7 - плата системы управления; 8 - фланец; 9 - ведущее колесо зубчатой передачи; 10 - ведомое колесо зубчатой передачи; 11 - червяк; 12 - вал; 13 - подшипник скольжения; 14 - колесо червячной передачи; 15 - ось конечной части, заменяющей большой палец; 16 - рычаг конечной части, заменяющей большой палец; 17 - тяга; 18 - ось конечной части, заменяющей указательный, средний, безымянный пальцы и мизинец; 19 - рычаг конечной части, заменяющей указательный, средний, безымянный пальцы и мизинец.
ОСУЩЕСТВЛЕНИЯ ТЕХНИЧЕСКОГО РЕШЕНИЯ
Для решения обозначенной проблемы разработана односхватовая биоэлектрическая кисть, состоящая из планетарного мотор-редуктора (1), цилиндрической эвольвентной зубчатой передачи, одной червячной передачи и рычажным механизмом для передачи усилия.
Возможность получения при осуществлении изобретения технического результата подтверждается следующим образом:
Конструкция имеет корпус, повторяющий форму ладони с шириной 60 мм, выполненный из полиамида, подвижную конечную часть, заменяющую большой палец (2), и подвижную конечную часть, заменяющую указательный, средний, безымянный пальцы и мизинец (3). Крышка корпуса (4) прикреплена к основанию корпуса с помощью винтов. Основание корпуса (5) соединено с узлом искусственного запястья (6), соединяющим искусственную кисть с гильзой протеза. К основной части корпуса с помощью винтов прикреплена плата системы управления (7), которая управляет вращением двигателя.
В качестве планетарного мотор-редуктора используется электрический серийный планетарный мотор-редуктор постоянного тока с мощностью 5 Вт и параметрами: диаметр - 7 мм, длина - 46 мм, вес - 60 г, крутящий момент 0,34 Н*м, мотор имеет частоту холостого хода 14000 об/мин, редуктор имеет передаточное отношение 91:1. Мотор-редуктор прикручен к фланцу (8) с помощью винтового соединения, фланец прикреплен к основанию корпуса с помощью винтового соединения. На выходном валу мотор-редуктора закреплено ведущее колесо зубчатой передачи (9)
В устройстве используется цилиндрическая эвольвентная зубчатая передача с передаточным отношением 1:1.
Ведомое колесо зубчатой передачи (10) и червяк червячной передачи (11) расположены на одном валу (12) диаметром 4 мм и длинной 60 мм, вращающемся в четырех подшипниках скольжения (13), расположенных в отверстии между основанием корпуса и крышкой корпуса. Червяк однозаходный приводит в действие червячное колесо (14), передаточное отношение червячной передачи 1:30. Червячное колесо соединено с подвижной конечной частью биоэлектрического протеза, заменяющей большой палец, вращающейся на оси (15), один конец которой закреплен в основании корпуса, а другой - в крышке корпуса.
Рычаг (16) подвижной конечной части биоэлектрического протеза, заменяющей большой палец, выполнен из полиамида. На его конце находится отверстие, в которое вставлена стальная ось диаметром 4 мм и длиной 9 мм, соединяющая рычаг со стальной тягой (17), и другой конец тяги соединяется с осью (18) полиамидного рычага (19) конечной части, заменяющей указательный, средний, безымянный пальцы и мизинец. Конечная часть, заменяющая указательный, средний, безымянный пальцы и мизинец, вращается на оси, закрепленной между основанием корпуса и крышкой корпуса.
Конструкция позволяет при габаритах детской руки 60 мм осуществлять схват предметов и их удержание.
ИСПОЛЬЗУЕМЫЕ ИСТОЧНИКИ ИНФОРМАЦИИ
Публикация «Электрическая кисть Electric Hand 2000 для детей» // Веб-сайт www.ottobock-export.com URL: https://www.ottobock-export.com/ru/prosthetics/products-from-a-to-z/arm-prosthetics/electric-hand-2000-children.
M. Egermann, M. Thomsen «Myoelektrische Prothesen bei Kindern im Kindergartenalter» // Der February 2003, Volume 32, Issue 2, pp 164-169. URL: https://link.springer.com/article/10.1007%2Fs00132-002-0431-9.
William J. Hanson, MS «VASI OFFERS ADVANCED PEDIATRIC HAND TECHNOLOGY» // The O&P EDGE. URL: https://opedge.com/Articles/ViewArticle/2003-10_06.
| название | год | авторы | номер документа |
|---|---|---|---|
| Односхватный электромеханический протез кисти | 2020 |
|
RU2762842C1 |
| ИСКУССТВЕННАЯ БИОЭЛЕКТРИЧЕСКАЯ КИСТЬ РУКИ | 2021 |
|
RU2779492C1 |
| МЕХАНИЗМ ЭЛЕКТРОПРИВОДА ПАЛЬЦА БИОНИЧЕСКОЙ КИСТИ | 2023 |
|
RU2808344C1 |
| ПАЛЕЦ ПРОТЕЗА СО СПИРОИДНЫМ РЕДУКТОРОМ И МОДУЛЬНАЯ КОНСТРУКЦИЯ ПРОТЕЗА ВЕРХНЕЙ КОНЕЧНОСТИ | 2019 |
|
RU2727893C1 |
| КИСТЕВОЙ ПРОТЕЗ | 2006 |
|
RU2387412C2 |
| БИОМЕХАНИЧЕСКИЙ КИСТЕВОЙ ПРОТЕЗ | 2019 |
|
RU2731607C1 |
| КИСТЕВОЙ ПРОТЕЗ | 2006 |
|
RU2427348C2 |
| ТЕАТРАЛЬНАЯ КУКЛА И КИСТЬ КУКЛЫ | 2006 |
|
RU2349360C2 |
| ПРОТЕЗ ПРЕДПЛЕЧЬЯ | 2015 |
|
RU2615278C2 |
| Механизм локтевого сустава роботизированного протеза плеча | 2022 |
|
RU2821186C2 |
Изобретение относится к медицине. Устройство механизма схвата детского односхватового биоэлектрического протеза верхней конечности содержит корпус, по меньшей мере один мотор или мотор-редуктор постоянного тока с планетарным, циклоидальным или волновым редуктором, по меньшей мере одну цилиндрическую зубчатую передачу и по меньшей мере одну червячную передачу. Мотор или мотор-редуктор постоянного тока с планетарным, циклоидальным или волновым редуктором соединен с основанием корпуса (5). Ведущее колесо цилиндрической зубчатой передачи закреплено на выходном валу мотора или мотор-редуктора и находится в зацеплении с ведомым колесом зубчатой передачи, передающим вращение на вал. Червяк червячной передачи расположен на валу, при этом червяк приводит в действие колесо червячной передачи, соединенное с подвижной конечной частью биоэлектрического протеза, заменяющей большой палец. Подвижная конечная часть биоэлектрического протеза, заменяющая большой палец, имеет рычаг, ось которого соединяется с помощью тяги с осью аналогичного рычага подвижной конечной части биоэлектрического протеза, заменяющей указательный, средний, безымянный пальцы и мизинец. Изобретение обеспечивает возможность управления малогабаритным биоэлектрическим протезом, позволяющим удерживать тяжелые предметы и фиксировать схват, в отсутствие неестественных движений локтя или плеча пользователя. 5 з.п. ф-лы, 5 ил.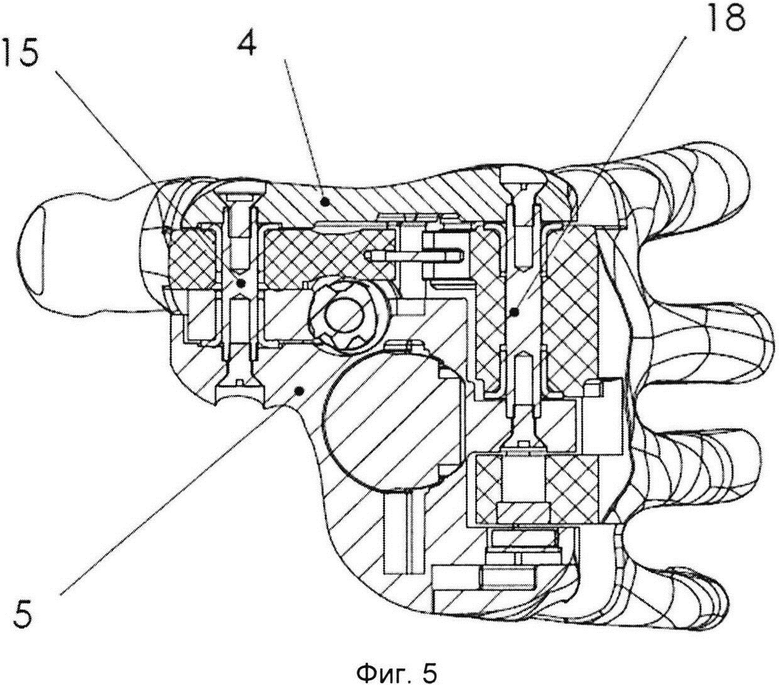
1. Устройство механизма схвата детского односхватового биоэлектрического протеза верхней конечности, содержащее корпус, по меньшей мере один мотор или мотор-редуктор постоянного тока с планетарным, циклоидальным или волновым редуктором, соединенный с основанием корпуса, по меньшей мере одну цилиндрическую зубчатую передачу, ведущее колесо которой закреплено на выходном валу мотора или мотор-редуктора и находится в зацеплении с ведомым колесом зубчатой передачи, передающим вращение на вал, и по меньшей мере одну червячную передачу, червяк которой расположен на валу, при этом червяк приводит в действие колесо червячной передачи, соединенное с подвижной конечной частью биоэлектрического протеза, заменяющей большой палец, а подвижная конечная часть биоэлектрического протеза, заменяющая большой палец, имеет рычаг, ось которого соединяется с помощью тяги с осью аналогичного рычага подвижной конечной части биоэлектрического протеза, заменяющей указательный, средний, безымянный пальцы и мизинец.
2. Устройство по п. 1, отличающееся тем, что ширина корпуса составляет до 65 мм.
3. Устройство по п. 1, отличающееся тем, что мотор или мотор-редуктор постоянного тока с планетарным, циклоидальным или волновым редуктором закреплен на фланце, прикрепленном к основанию корпуса.
4. Устройство по п. 1, отличающееся тем, что используемые колесо зубчатой передачи и червяк червячной передачи находятся на валу, вращающемся в подшипниках скольжения и расположенном в отверстии между главной частью корпуса и крышкой.
5. Устройство по п. 1, отличающееся тем, что подвижная конечная часть биоэлектрического протеза, заменяющая большой палец, вращающаяся на оси, закреплена в основании и крышке корпуса.
6. Устройство по п. 1, отличающееся тем, что управление механизмом схвата осуществляется с помощью платы системы управления.
| WO 1995024875 A1, 21.09.1995 | |||
| СПОСОБ ПОЛУЧЕНИЯ ЭТИЛЕНДИАМИНА | 0 |
|
SU176303A1 |
| US 20150216680 A1, 06.08.2015 | |||
| US 7867287 B2, 11.01.2011 | |||
| US 4114464 A1, 19.09.1978 | |||
| US 3683423 A1, 15.08.1972 | |||
| WO 2007063266 A1, 07.06.2007 | |||
| US 4623354 A1, 18.11.1986. | |||

