Изобретение относится к области кораблестроения и может быть использовано для контроля взаимного положения оси торпедного аппарата и оси стеллажа для хранения и загрузки боезапаса на различной глубине нахождения носителя.
Широко известен и применяется во многих отраслях промышленности оптический метод контроля взаимного положения объектов с использованием автоколлиматора и зеркального отражателя, устанавливаемых, как правило, следующим образом: первый на базовом объекте, относительно которого измеряется взаимное положение, а второй - на объекте, положение которого изменяется относительно базового. Данный метод реализован, например, в устройстве для измерения взаимного углового положения отражателей по патенту РФ № 2186337, МПК G01B 11/26, G02B 23/00, опубл. 27.07.2002, а также в устройстве измерения взаимного углового положения отражателей по патенту РФ № 2095753, МПК G01B 11/26, G02B 23/00, опубл. 10.11.1997, принятых в качестве аналогов. Оба изобретения-аналоги содержат автоколлиматор, узел коллинеарного переноса лучей и плоские зеркальные отражатели в различном количестве.
Общим недостатком устройств-аналогов является невозможность их применения в целях контроля взаимного положения оси торпедного аппарата и оси стеллажа для хранения и загрузки боезапаса на различных глубинах нахождения носителя вследствие:
- отсутствия средств физической фиксации оси торпедного аппарата (задаваемой центрами сечений в районе заднего и переднего среза торпедного аппарата) и оси стеллажа (задаваемой центрами расточек носовой и кормовой направляющих стеллажа);
- отсутствия возможности контроля взаимного линейного и углового перемещения оси торпедного аппарата и оси стеллажа при нахождении на различных глубинах, в том числе, при закрытой задней крышке торпедного аппарата;
- низкой повторяемости результатов измерений вследствие отсутствия механизмов центровки относительно базовых плоскостей торпедного аппарата.
Известно принятое за прототип устройство для автоматизированного контроля параметров внутренней геометрии торпедных аппаратов по патенту РФ № 2749145, СПК F41F 3/10, G01B 5/00, опубл. 07.06.2021, содержащее оборудование для упомянутого контроля, установленное в корпусе, снабжённом радиальными распорками с подпружиненными роликами, расположенными по периметру корпуса в плоскости, перпендикулярной оси исследуемого торпедного аппарата, и электропривод для перемещения устройства внутри торпедного аппарата, при этом в состав устройства входят узел автоматизированной фиксации отклонений оси корпуса устройства при его перемещении внутри торпедного аппарата от его продольной оси и программно-технический комплекс автоматизированной обработки результатов измерений, а оборудование для обследования внутренней геометрии торпедного аппарата выполнено в виде механических датчиков линейных перемещений, расположенных на радиальных распорках и контактирующих с внутренними контролируемыми поверхностями торпедного аппарата, кроме того, корпус устройства снабжён механизмом его центровки относительно базовых плоскостей торпедного аппарата.
Основным недостатком устройства-прототипа является невозможность контроля взаимного положения оси торпедного аппарата и оси стеллажа для хранения и загрузки боезапаса на различных глубинах нахождения носителя вследствие отсутствия средств физической фиксации оси стеллажа и отсутствия возможности контроля взаимного линейного и углового перемещения оси торпедного аппарата и оси стеллажа, в том числе, при закрытой задней крышке торпедного аппарата.
Технической задачей настоящего изобретения является разработка комплекса контроля взаимного положения оси торпедного аппарата и оси стеллажа для хранения и загрузки боезапаса на различной глубине нахождения носителя, обеспечивающего точность и повторяемость процедур контроля.
Техническим результатом изобретения является возможность контроля взаимного положения оси торпедного аппарата и оси стеллажа для хранения и загрузки боезапаса на различной глубине нахождения носителя при закрытой задней крышке торпедного аппарата.
Указанный результат достигается за счёт того, что комплекс контроля взаимного положения оси торпедного аппарата и оси стеллажа для хранения и загрузки боезапаса содержит устройство для автоматизированного контроля параметров внутренней геометрии торпедных аппаратов, программно-технический комплекс автоматизированной обработки результатов измерений, при этом с целью фиксации оси стеллажа комплекс содержит кормовой фиксатор стеллажа с регулируемой оправой, в которой установлен оптический прибор типа визирной трубы с автоколлиматором, и носовой фиксатор стеллажа с базовой мишенью, с целью контроля взаимного линейного и углового перемещения оси торпедного аппарата и оси стеллажа при нахождении на различных глубинах комплекс содержит установленный на задней крышке торпедного аппарата зеркальный отражатель с нанесёнными на отражающую поверхность вертикальной и горизонтальной шкалами и механизмом выверки относительно оси стеллажа, а устройство для автоматизированного контроля параметров внутренней геометрии торпедных аппаратов снабжено узлом передачи информации через герметично закрытую заднюю крышку торпедного аппарата.
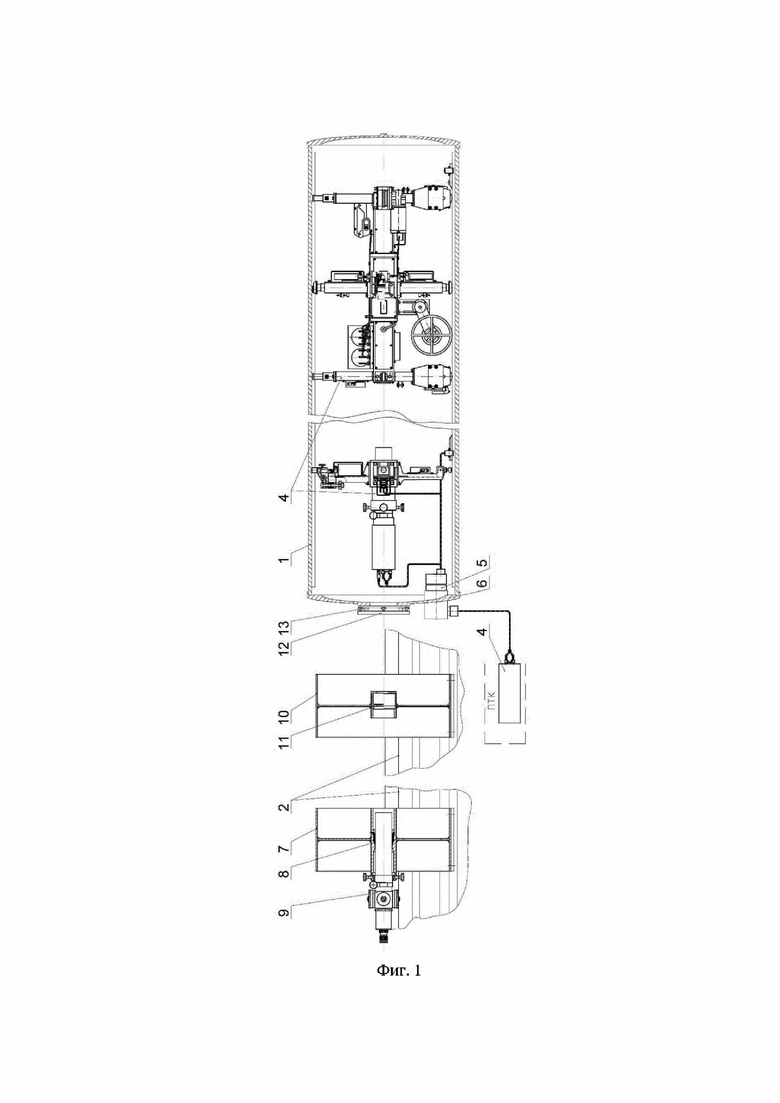
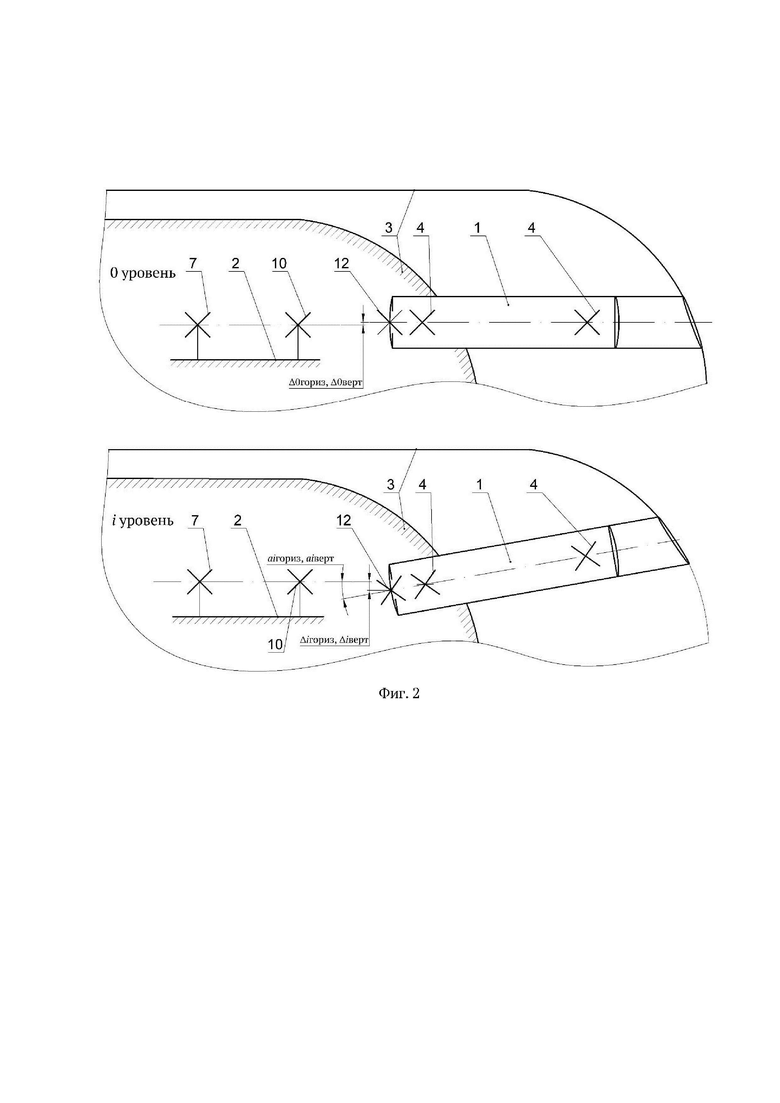
Сущность настоящего изобретения отражена на фиг. 1, где показана схема размещения заявляемого комплекса внутри торпедного отсека носителя (продольный разрез) и на фиг. 2, где показана принципиальная схема применения заявляемого комплекса на различных глубинах погружения носителя.
Комплекс контроля взаимного положения оси торпедного аппарата 1 и оси стеллажа 2 для хранения и загрузки боезапаса на различных глубинах погружения носителя 3 содержит (фиг. 1, 2) устройство 4 для автоматизированного контроля параметров внутренней геометрии торпедных аппаратов, снабжённое (фиг. 1) узлом 5 для передачи информации через герметично закрытую заднюю крышку 6 торпедного аппарата. С целью фиксации оси стеллажа 2 комплекс содержит (фиг. 1, 2) кормовой фиксатор стеллажа 7 с (фиг. 1) регулируемой оправой 8, в которой установлен оптический прибор 9 типа визирной трубы с автоколлиматором, а также (фиг. 1, 2) носовой фиксатор стеллажа 10 с (фиг. 1) базовой мишенью 11. С целью контроля взаимного линейного и углового перемещения оси торпедного аппарата 1 и оси стеллажа 2 при нахождении на различных глубинах комплекс содержит установленный на задней крышке 6 торпедного аппарата 1 зеркальный отражатель 12 с нанесёнными на отражающую поверхность последнего вертикальной и горизонтальной шкалами (на фиг. не показаны) и механизмом 13 выверки относительно оси стеллажа 2.
Комплекс контроля взаимного положения оси торпедного аппарата и оси стеллажа для хранения и загрузки боезапаса работает следующим образом.
Подготовка работ с использованием комплекса проводится на носителе 3, находящемся в надводном положении. Перед началом измерений из штатного футляра извлекаются составные части комплекса, проверяется их комплектность и работоспособность, открывается и устанавливается на стопор задняя крышка 6 торпедного аппарата 1. В торпедный аппарат 1 загружается устройство 4 для автоматизированного контроля параметров внутренней геометрии торпедных аппаратов, производится его подготовка к работе (о подготовке устройства к работе - см. патент РФ № 2749145, СПК F41F 3/10, G01B 5/00, опубл. 07.06.2021), после чего закрывается задняя крышка 6 торпедного аппарата 1, обеспечивая дистанционное управление устройством 4 с использованием узла 5 для передачи информации через герметично закрытую заднюю крышку 6 торпедного аппарата 1. Устанавливается на стеллаже 2 кормовой фиксатор стеллажа 7 с оптическим прибором 9 типа визирной трубы с автоколлиматором и носовой фиксатор стеллажа 10 с базовой мишенью 11. Монтируется на задней крышке 6 торпедного аппарата 1 зеркальный отражатель 12. Комплекс готов к работе.
Далее при нахождении носителя 3 в надводном положении осуществляются измерения параметров внутренней геометрии торпедного аппарата 1 в автоматизированном режиме с использованием устройства 4 для автоматизированного контроля параметров внутренней геометрии торпедных аппаратов 1 (о работе устройства - см. патент РФ № 2749145, СПК F41F 3/10, G01B 5/00, опубл. 07.06.2021). Определяется первоначальное положение оси торпедного аппарата 1. Одновременно первоначально фиксируется ось стеллажа 2 наведением оптического прибора 9, установленного в регулируемой оправе 8 кормового фиксатора стеллажа 7, на перекрестие базовой мишени 11, установленной в носовом фиксаторе стеллажа 10, после чего механизмом выверки 13 с контролем оптическим прибором 9 в режиме автоколлимации регулируется положение зеркального отражателя 12 таким образом, чтобы нормаль к отражающей поверхности отражателя 12 совпадала с осью стеллажа 2. После выверки снимаются отсчёты по вертикальной и горизонтальной шкалам зеркального отражателя 12 (Δ0гориз, Δ0верт).
По завершении измерений на плаву в надводном положении, осуществляется погружение носителя 3 на уровень, на котором требуется оценить рассогласование положения осей торпедного аппарата 1 и стеллажа 2. Повторно осуществляются измерения параметров внутренней геометрии торпедного аппарата 1 в автоматизированном режиме с использованием устройства 4 для автоматизированного контроля параметров внутренней геометрии торпедных аппаратов 1. Определяется новое положение оси торпедного аппарата 1. Далее снимаются отсчёты по вертикальной и горизонтальной шкалам зеркального отражателя 12, определяются величины взаимного линейного перемещения (Δiгориз, Δiверт) кормовой точки оси торпедного аппарата 1 и оси стеллажа 2 по отношению к надводному положению носителя 3. Для оценки взаимного углового перемещения (aiгориз, aiверт) оси торпедного аппарата 1 и оси стеллажа 2 оптический прибор 9, установленный в регулируемой оправе 8 кормового фиксатора стеллажа 7, разворачивается и в режиме автоколлимации ось оптического прибора 9 устанавливается нормально к отражающей поверхности отражателя 12, изменившего своё положение под воздействием внешних сил при деформации корпуса носителя 3, снимаются показания по базовой мишени 11, установленной в носовом фиксаторе стеллажа 10, и вычисляется угол, на который развернулась ось торпедного аппарата 1 относительно оси стеллажа 2. После этого с помощью регулируемой оправы 8 оптический прибор 9 устанавливается в первоначальное положение, фиксирующее ось стеллажа 2, а носитель 3 может погружаться на следующую контрольную глубину.
По окончании измерений следует:
- извлечь или демонтировать составные части комплекса;
- уложить части комплекса в штатный футляр и транспортировать к месту хранения.
По завершении работ комплекс готов к новому циклу измерений.
Таким образом, предлагаемый комплекс контроля взаимного положения оси торпедного аппарата и оси стеллажа для хранения и загрузки боезапаса позволяет решить поставленную техническую задачу.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ АВТОМАТИЗИРОВАННОГО КОНТРОЛЯ ПАРАМЕТРОВ ВНУТРЕННЕЙ ГЕОМЕТРИИ ТОРПЕДНЫХ АППАРАТОВ | 2020 |
|
RU2749145C1 |
| Пусковая установка с гравитационно-пружинным выстреливанием подводных снарядов с возможностью размещения на плавсредствах и/или летательных аппаратах | 2024 |
|
RU2834491C1 |
| СУДНО-ДОК | 2006 |
|
RU2326786C1 |
| ПОДВОДНАЯ ЛОДКА С ГИДРАВЛИЧЕСКИМИ ТОРПЕДНЫМИ АППАРАТАМИ | 2013 |
|
RU2578923C2 |
| Способ изготовления внутреннего отверстия в трубе при помощи расточного устройства | 2024 |
|
RU2839745C1 |
| СПОСОБ ПРИЕМА В ПОДВОДНУЮ ЛОДКУ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2328407C1 |
| КОРАБЛЬ ГИДРОГРАФИЧЕСКОЙ И ПАТРУЛЬНОЙ СЛУЖБЫ | 2010 |
|
RU2459738C2 |
| УСТРОЙСТВО ДЛЯ ПРОВЕРКИ ПАРАЛЛЕЛЬНОСТИ ОСЕЙ | 2002 |
|
RU2249786C2 |
| Система вывески и дифферентовки подводного грузового контейнера | 2015 |
|
RU2618583C2 |
| Контрольно-юстировочное устройство | 1978 |
|
SU742858A1 |
Изобретение относится к области кораблестроения и может быть использовано для контроля взаимного положения оси торпедного аппарата и оси стеллажа для хранения и загрузки боезапаса на различной глубине нахождения носителя. Комплекс контроля взаимного положения оси торпедного аппарата и оси стеллажа для хранения и загрузки боезапаса содержит устройство для автоматизированного контроля параметров внутренней геометрии торпедных аппаратов, программно-технический комплекс автоматизированной обработки результатов измерений, при этом с целью фиксации оси стеллажа комплекс содержит кормовой фиксатор стеллажа с регулируемой оправой, в которой установлен оптический прибор типа визирной трубы с автоколлиматором, и носовой фиксатор стеллажа с базовой мишенью, с целью контроля взаимного линейного и углового перемещения оси торпедного аппарата и оси стеллажа при нахождении на различных глубинах комплекс содержит установленный на задней крышке торпедного аппарата зеркальный отражатель с нанесёнными на отражающую поверхность вертикальной и горизонтальной шкалами и механизмом выверки относительно оси стеллажа, а устройство для автоматизированного контроля параметров внутренней геометрии торпедных аппаратов снабжено узлом передачи информации через герметично закрытую заднюю крышку торпедного аппарата. Техническим результатом изобретения является возможность контроля взаимного положения оси торпедного аппарата и оси стеллажа для хранения и загрузки боезапаса на различной глубине нахождения носителя при закрытой задней крышке торпедного аппарата. 2 ил.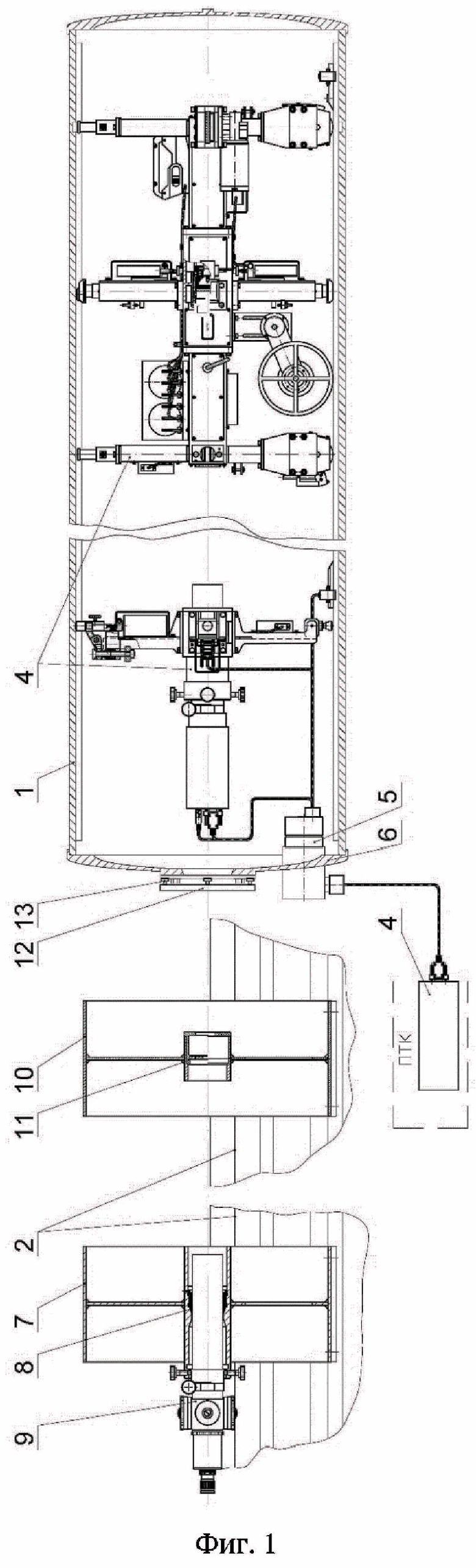
Комплекс контроля взаимного положения оси торпедного аппарата и оси стеллажа для хранения и загрузки боезапаса, включающий устройство для автоматизированного контроля параметров внутренней геометрии торпедных аппаратов, программно-технический комплекс автоматизированной обработки результатов измерений, отличающийся тем, что содержит кормовой фиксатор стеллажа с регулируемой оправой, в которой установлен оптический прибор типа визирной трубы с автоколлиматором, носовой фиксатор стеллажа с базовой мишенью, а также зеркальный отражатель, установленный на задней крышке торпедного аппарата, с нанесёнными на отражающую поверхность вертикальной и горизонтальной шкалами и механизмом выверки относительно оси стеллажа, а устройство для автоматизированного контроля параметров внутренней геометрии торпедных аппаратов снабжено узлом передачи информации через герметично закрытую заднюю крышку торпедного аппарата.
| УСТРОЙСТВО ДЛЯ АВТОМАТИЗИРОВАННОГО КОНТРОЛЯ ПАРАМЕТРОВ ВНУТРЕННЕЙ ГЕОМЕТРИИ ТОРПЕДНЫХ АППАРАТОВ | 2020 |
|
RU2749145C1 |
| ПУСКОВАЯ УСТАНОВКА ПОДВОДНОЙ ЛОДКИ | 2018 |
|
RU2684342C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВЗАИМНОГО УГЛОВОГО ПОЛОЖЕНИЯ ОТРАЖАТЕЛЕЙ | 2000 |
|
RU2186337C2 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ВЗАИМНОГО УГЛОВОГО ПОЛОЖЕНИЯ ОТРАЖАТЕЛЕЙ | 1996 |
|
RU2095753C1 |

