Область техники
[0001]
Настоящее изобретение относится к способу помощи при вождении и устройству помощи при вождении.
Уровень техники
[0002]
Технология, описанная в PTL 1, известна как технология управления рассматриваемым транспортным средством для движения так, чтобы избежать объект впереди рассматриваемого транспортного средства.
Устройство помощи при вождении, описанное в PTL 1, устанавливает величину бокового перемещения от объекта, необходимую для уклонения от объекта, в соответствии с относительной скоростью объекта по отношению к рассматриваемому транспортному средству и типом объекта, а также управляет движением на основе величины бокового перемещения и текущего состояния движения рассматриваемого транспортного средства
Документы предшествующего уровня техники
Патентная литература
[0003]
PTL 1: JP 2009-286279 A
Сущность изобретения
Техническая проблема
[0004]
Однако, когда есть множество объектов впереди пути рассматриваемого транспортного средства, устройство помощи при вождении, описанное в PTL 1, устанавливает величины бокового перемещения, соответственно разные для объектов, из-за чего рулевое управление происходит каждый раз, когда рассматриваемое транспортное средство избегает каждого из объектов, так что плавное уклонение невозможно.
Задача настоящего изобретения состоит в том, чтобы, когда множество опасностей присутствует впереди пути рассматриваемого транспортного средства, позволить рассматриваемому транспортному средству плавно проехать мимо множества опасностей с зазорами от опасностей.
Решение проблемы
[0005]
Согласно одному аспекту настоящего изобретения предоставляется способ помощи при вождении, включающий в себя: обнаружение множества опасностей, которые соответственно присутствуют на одной стороне из левой стороны и правой стороны дороги рассматриваемого транспортного средства, которая является дорогой, по которой движется рассматриваемое транспортное средство, причем одна сторона находится близко к рассматриваемому транспортному средству, и которые находятся в различных передних и задних положениях впереди пути рассматриваемого транспортного средства; определение, в соответствии с типами множества опасностей, каждой из величин бокового перемещения рассматриваемого транспортного средства для избегания и проезда мимо множества опасностей с зазорами от множества опасностей; и формирование траектории движения, избегающей и проходящей мимо множества опасностей в боковом положении, перемещенном на величину, равную или превышающую максимальную величину бокового перемещения среди упомянутых определенных величин бокового перемещения.
Положительные эффекты изобретения
[0006]
Согласно аспекту настоящего изобретения возможно, когда множество опасностей присутствует впереди пути рассматриваемого транспортного средства, позволять рассматриваемому транспортному средству плавно проезжать мимо множества опасностей с зазорами от опасностей.
Задача и преимущества изобретения будут реализованы и достигнуты с помощью элементов и комбинаций, конкретно указанных в формуле изобретения. Следует понимать, что как предшествующее общее описание, так и последующее подробное описание являются иллюстративными и пояснительными и не ограничивают изобретение.
Краткое описание чертежей
[0007]
Фиг. 1 - схема, иллюстрирующая схематический пример структуры устройства помощи при вождении, включающего в себя устройство формирования траектории движения в соответствии с вариантом осуществления;
Фиг. 2 - схема, иллюстрирующая пример множества опасностей, присутствующих впереди пути рассматриваемого транспортного средства;
Фиг. 3 - схема, иллюстрирующая один пример величин бокового перемещения для избегания и проезда мимо множества опасностей с зазорами от опасностей;
Фиг. 4 - схема, иллюстрирующая один пример траектории движения, сформированной устройством формирования траектории движения согласно первому варианту осуществления;
Фиг. 5 - блок-схема, иллюстрирующая один пример функциональной структуры контроллера по фиг. 1 в первом варианте осуществления;
Фиг. 6 - блок-схема, иллюстрирующая один пример способа помощи при вождении согласно первому варианту осуществления;
Фиг. 7 - схема, иллюстрирующая первый пример траектории движения, сформированной устройством формирования траектории движения согласно второму варианту осуществления;
Фиг. 8 - схема, иллюстрирующая второй пример траектории движения, сформированной устройством формирования траектории движения согласно второму варианту осуществления;
Фиг. 9 - блок-схема, иллюстрирующая один пример функциональной структуры контроллера по фиг. 1 во втором варианте осуществления;
Фиг. 10 - блок-схема, иллюстрирующая один пример способа помощи при вождении согласно второму варианту осуществления;
Фиг. 11 - схема, иллюстрирующая первый пример траектории движения, сформированной устройством формирования траектории движения согласно третьему варианту осуществления;
Фиг. 12 - схема, иллюстрирующая второй пример траектории движения, сформированной устройством формирования траектории движения согласно третьему варианту осуществления;
Фиг. 13 - схема, иллюстрирующая третий пример траектории движения, сформированной устройством формирования траектории движения согласно третьему варианту осуществления;
Фиг. 14 - схема, иллюстрирующая четвертый пример траектории движения, сформированной устройством формирования траектории движения согласно третьему варианту осуществления;
Фиг. 15 - схема, иллюстрирующая пятый пример траектории движения, сформированной устройством формирования траектории движения согласно третьему варианту осуществления;
Фиг. 16 - схема, иллюстрирующая шестой пример траектории движения, сформированной устройством формирования траектории движения согласно третьему варианту осуществления;
Фиг. 17 - схема, иллюстрирующая седьмой пример траектории движения, сформированной устройством формирования траектории движения согласно третьему варианту осуществления;
Фиг. 18 - блок-схема, иллюстрирующая один пример способа помощи при вождении согласно третьему варианту осуществления;
Фиг. 19 - блок-схема, иллюстрирующая один пример процесса формирования второй траектории движения по фиг. 18;
Фиг. 20 - блок-схема, иллюстрирующая один пример процесса формирования третьей траектории движения по фиг. 18; и
Фиг. 21 - схема, иллюстрирующая один пример траектории движения, сформированной устройством формирования траектории движения согласно модификации.
Описание вариантов осуществления
[0008]
Ниже со ссылкой на чертежи будут описаны варианты осуществления настоящего изобретения.
(Первый вариант осуществления)
(Структура)
Ссылка будет сделана на фиг. 1. На основе условий движения вокруг транспортного средства (далее именуемого «рассматриваемое транспортное средство»), снабженного устройством 1 помощи при вождении, устройство 1 помощи при вождении выполняет управление помощью при вождении для автоматического руления или остановки рассматриваемого транспортного средства и управление автоматическим вождением для автоматического вождения рассматриваемого транспортного средства без участия водителя.
Устройство 1 помощи при вождении включает в себя группу 10 датчиков окружающей среды, навигационную систему 20, группу 30 датчиков транспортного средства, контроллер 40, контроллер 50 управления движением и группу 51 исполнительных механизмов (актуаторов) управления транспортным средством.
[0009]
Группа 10 датчиков окружающей среды представляет собой группу датчиков, выполненную с возможностью обнаружения окружающей среды рассматриваемого транспортного средства, например, объектов вокруг рассматриваемого транспортного средства. Группа 10 датчиков окружающей среды может включать в себя дальномер 11 и камеру 12. Дальномер 11 и камера 12 обнаруживают окружающую среду рассматриваемого транспортного средства, такую как объекты, присутствующие вокруг рассматриваемого транспортного средства, относительные положения между рассматриваемым транспортным средством и объектами и расстояния между рассматриваемым транспортным средством и объектами.
Дальномер 11 может быть, например, лазерным дальномером (LRF) или радаром.
[0010]
Камера 12 может быть, например, стереокамерой. Камера 12 может быть монокулярной камерой, с помощью которой один и тот же объект может быть сфотографирован с множества точек обзора для вычисления расстояния до объекта.
Дальномер 11 и камера 12 выводят информацию об окружающей среде, которая является информацией об обнаруженной окружающей среде, на контроллер 40.
[0011]
Навигационная система 20 распознает текущее положение рассматриваемого транспортного средства и информацию о карте дороги в текущем положении. Навигационная система 20 устанавливает маршрут движения к пункту назначения, введенному пользователем транспортного средства, и дает руководство по маршруту пользователю транспортного средства в соответствии с маршрутом движения. Кроме того, навигационная система 20 выводит информацию об установленном маршруте движения в контроллер 40.
Когда состояние движения рассматриваемого транспортного средства является режимом автоматического вождения, контроллер 40 автоматически приводит в движение рассматриваемое транспортное средство, чтобы двигаться по маршруту движения, установленному навигационной системой 20.
[0012]
Навигационная система 20 включает в себя контроллер 21 навигации, устройство 22 позиционирования, базу данных 23 карт, блок 24 отображения, операционный блок 25, блок 26 вывода аудио и блок 27 связи. Обратите внимание, что на фиг. 1, база данных карт называется БД карт.
Контроллер 21 навигации представляет собой электронный блок управления, выполненный с возможностью управления операцией обработки информации навигационной системы 20. Контроллер 21 навигации включает в себя процессор и его периферийные компоненты. Процессором может быть, например, центральным процессором (CPU) или микропроцессором (MPU).
[0013]
Периферийные компоненты включают в себя запоминающее устройство и т.п. Запоминающее устройство может включать в себя любое из полупроводникового запоминающего устройства, магнитного запоминающего устройства и оптического запоминающего устройства. Запоминающее устройство может включать в себя запоминающие устройства, такие как регистр, кэш-память, постоянное запоминающее устройство (ROM) и оперативное запоминающее устройство (RAM), используемые в качестве первичных запоминающих устройств.
Устройство 22 позиционирования измеряет текущее положение рассматриваемого транспортного средства. Устройство 22 позиционирования может быть, например, приемником глобальной системы позиционирования (GPS). Устройство 22 позиционирования может измерять текущее положение рассматриваемого транспортного средства на основе спутникового сигнала другой спутниковой системы позиционирования, такой как глобальная навигационная спутниковая система (ГЛОНАСС). В качестве альтернативы устройство 22 позиционирования может быть инерциальным навигационным устройством.
[0014]
База данных 23 карт хранит данные карты дорог. Данные карты дорог включают информацию о типах дорожных линий, формах дорог, уклонах, количестве полос движения, разрешенных скоростях (ограничениях скорости), ширине дорог, правилах приоритета для обозначения приоритетных дорог, правилах остановки для обозначения знака остановки и т.д., а также наличие или отсутствие стыков. К типам дорожных линий относятся, например, обычные дороги и автомагистрали.
Блок 24 отображения выводит различную визуальную информацию в навигационную систему 20. Например, блок 24 отображения может отображать экран карты вокруг рассматриваемого транспортного средства и указания по рекомендованному маршруту.
[0015]
В навигационной системе 20 операционный блок 25 принимает операцию от пользователя транспортного средства. Операционный блок 25 может быть, например, кнопкой, диском, ползунком и т.п., или может быть сенсорной панелью, предусмотренной на блоке 24 отображения. Например, операционный блок 25 может принимать операцию для ввода пункта назначения и операцию для переключения экрана дисплея блока 24 отображения пользователем транспортного средства.
Блок 26 вывода аудио выводит различные фрагменты аудио информации в навигационную систему 20. Блок 26 вывода аудио может выводить руководство по вождению на основе установленного маршрута движения и информацию о руководстве по дороге на основе данных карты дорог вокруг рассматриваемого транспортного средства.
Блок 27 связи выполняет беспроводную связь с устройством связи за пределами рассматриваемого транспортного средства. Система связи посредством блока 27 связи может быть, например, беспроводной связью через сеть мобильной связи общего пользования, связью между транспортными средствами (vehicle-to-vehicle communication), связью между дорожной инфраструктурой и транспортными средствами (road-to-vehicle communication) или спутниковой связью. Навигационная система 20 может получать данные карты дорог от внешнего устройства через блок 27 связи.
[0016]
Группа 30 датчиков транспортного средства включает в себя датчики, выполненные с возможностью обнаружения состояния движения рассматриваемого транспортного средства, и датчики, выполненные с возможностью обнаружения операции вождения, выполняемой водителем.
Датчики, выполненные с возможностью обнаружения состояния движения рассматриваемого транспортного средства, включают в себя датчик 31 скорости транспортного средства, датчик 32 ускорения и гироскопический датчик 33.
Датчики, выполненные с возможностью обнаружения операции вождения, включают в себя датчик 34 угла поворота рулевого колеса, датчик 35 акселератора и датчик 36 тормоза.
[0017]
Датчик 31 скорости транспортного средства обнаруживает скорость колеса рассматриваемого транспортного средства и вычисляет скорость рассматриваемого транспортного средства на основе скорости колес.
Датчик 32 ускорения обнаруживает ускорение в продольном направлении рассматриваемого транспортного средства, ускорение в направлении его ширины, и ускорение в его вертикальном направлении.
Гироскопический датчик 33 обнаруживает угловую скорость угла поворота рассматриваемого транспортного средства вокруг трех осей, включая ось крена, ось тангажа и ось рыскания.
[0018]
Датчик 34 угла поворота рулевого колеса обнаруживает текущий угол поворота рулевого колеса, который является текущим углом поворота (величиной операции руления (рулевого управления)) рулевого колеса, служащего элементом операции рулевого управления.
Датчик 35 акселератора обнаруживает положение акселератора рассматриваемого транспортного средства. Например, датчик 35 акселератора определяет в качестве положения акселератора величину нажатия педали акселератора рассматриваемого транспортного средства.
Датчик 36 тормоза обнаруживает операции торможения водителем. Например, датчик 36 тормоза определяет в качестве величины операции торможения величину нажатия педали тормоза рассматриваемого транспортного средства.
Информация о скорости, ускорении, угловой скорости, угле руления, положении акселератора и величине операции торможения рассматриваемого транспортного средства, обнаруженная соответствующими датчиками группы 30 датчиков транспортного средства, в совокупности называется «информацией датчиков». Группа 30 датчиков транспортного средства выводит информацию датчиков в контроллер 40.
[0019]
Контроллер 40 - это электронный блок управления, выполненный с возможностью выполнения помощи при вождении рассматриваемого транспортного средства. Контроллер 40 включает в себя процессор 41 и периферийные компоненты, такие как запоминающее устройство 42. Процессор 41 может быть, например, CPU или MPU.
Запоминающее устройство 42 может включать в себя любое из полупроводникового запоминающего устройства, магнитного запоминающего устройства и оптического запоминающего устройства. Запоминающее устройство 42 может включать в себя запоминающие устройства, такие как регистр, кэш-память, а также ROM и RAM, используемые в качестве первичного запоминающего устройства.
Отметим, что контроллер 40 может быть воплощен в виде функциональной логической схемы, установленной в полупроводниковой интегральной схеме общего назначения. Например, контроллер 40 может включать в себя программируемое логическое устройство (PLD), такое как программируемая вентильная матрица (FPGA) или подобное.
[0020]
Контроллер 40 формирует траекторию движения, чтобы предписывать рассматриваемому транспортному средству двигаться по маршруту движения, установленному навигационной системой 20, на основе информации об окружающей среде, вводимой из группы 10 датчиков окружающей среды, и информации датчиков, вводимой из группы 30 датчиков транспортного средства.
Контроллер 40 выводит сформированную траекторию движения в контроллер 50 управления движением.
Группа 10 датчиков окружающей среды, навигационная система 20, группа 30 датчиков транспортного средства и контроллер 40 образуют устройство 2 формирования траектории движения, выполненное с возможностью формирования траектории движения, по которой предписывается двигаться рассматриваемому транспортному средству.
[0021]
Контроллер 50 управления движением представляет собой электронный блок управления, выполненный с возможностью выполнять управление вождением рассматриваемого транспортного средства. Контроллер 50 управления движением включает в себя процессор и периферийные компоненты, такие как запоминающее устройство. Процессор может быть, например, CPU или MPU.
Запоминающее устройство может включать в себя любое из полупроводникового запоминающего устройства, магнитного запоминающего устройства и оптического запоминающего устройства. Запоминающее устройство может включать в себя запоминающие устройства, такие как регистр, кэш-память, а также ROM и RAM, используемые в качестве первичного запоминающего устройства.
[0022]
Следует отметить, что контроллер 50 управления движением может быть воплощен в виде функциональной логической схемы, установленной в полупроводниковой интегральной схеме общего назначения. Например, контроллер 50 управления движением может включать в себя PLD, такое как FPGA и т.п.
Контроллер 50 управления движением приводит в действие группу 51 исполнительных механизмов управления транспортным средством, так что рассматриваемое транспортное средство движется по траектории движения, формируемой контроллером 40, тем самым предписывая рассматриваемому транспортному средству двигаться автоматически.
[0023]
Группа 51 исполнительных механизмов управления транспортным средством управляет рулевым колесом рассматриваемого транспортного средства, его положением акселератора и его тормозным устройством в ответ на управляющий сигнал от контроллера 40, чтобы вызвать возникновение поведения транспортного средства для рассматриваемого транспортного средства. Группа 51 исполнительных механизмов управления транспортным средством включает исполнительный механизм 52 руления, исполнительный механизм 53 положения акселератора и исполнительный элемент 54 управления тормозом.
Исполнительный механизм 52 руления управляет направлением руления и величиной руления при рулении рассматриваемым транспортным средством.
Исполнительный механизм 53 положения акселератора управляет положением педали акселератора рассматриваемого транспортного средства.
Исполнительный механизм 54 управления тормозом управляет операцией торможения тормозного устройства рассматриваемого транспортного средства.
[0024]
Далее будет дано описание траектории движения, формируемой устройством 2 формирования траектории движения, когда есть опасность впереди пути рассматриваемого транспортного средства.
В настоящем описании «опасность» включает в себя объект уклонения, которого следует избегать рассматриваемому транспортному средству, и объект разделения, который необходимо проехать мимо, избегая его с зазором от рассматриваемого транспортного средства. Например, опасность может включать в себя препятствие, присутствующее на дороге рассматриваемого транспортного средства, которая является дорогой, по которой движется рассматриваемое транспортное средство. Такое препятствие является объектом уклонения, которого необходимо избегать рассматриваемому транспортному средству, и включает в себя припаркованное транспортное средство, остановившееся транспортное средство, пешехода, двухколесное транспортное средство и временно построенный объект или упавший объект на дороге. Кроме того, «избегать и проезжать мимо опасности» означает проезжать мимо с сохранением заранее определенного безопасного расстояния (с зазором) от опасности в поперечном направлении дороги рассматриваемого транспортного средства. Обратите внимание, что в последующем описании для простоты это будет просто называться «проезжать мимо опасности(-ей)».
[0025]
Кроме того, например, опасность может включать в себя перекресток, на котором перекрестная дорога, которая пересекается с дорогой рассматриваемого транспортного средства впереди пути рассматриваемого транспортного средства, сливается с дорогой рассматриваемого транспортного средства (выход из перекрестной дороги на дорогу рассматриваемого транспортного средства). Это связано с тем, что при проезде через перекресток, на котором перекрестная дорога сливается с дорогой рассматриваемого транспортного средства, рассматриваемое транспортное средство проезжает перекресток с зазором от перекрестной дороги, учитывая возможность того, что другое транспортное средство может въехать с перекрестной дороги на дорогу рассматриваемого транспортного средства. По той же причине выезд с парковки, обращенный к дороге рассматриваемого транспортного средства, также может представлять опасность. Обратите внимание, что в нижеследующем описании перекресток, на котором перекрестная дорога, пересекающаяся с дорогой рассматриваемого транспортного средства, сливается с дорогой рассматриваемого транспортного средства (выезд с перекрестной дороги на дорогу рассматриваемого транспортного средства), также ради простоты будет просто называться «перекрестная дорога».
Ссылка будет сделана на фиг. 2. Устройство 2 формирования траектории движения обнаруживает каждую из множества опасностей 71, 72 и 73, которые соответственно присутствуют на одной стороне из левой стороны и правой стороны дороги рассматриваемого транспортного средства, по которой движется рассматриваемое транспортное средство 70, причем одна сторона находится рядом с рассматриваемым транспортным средством 70, и которые находятся в различных передних и задних положениях впереди пути рассматриваемого транспортного средства 70. Например, опасность 71 - это пешеход, опасность 72 - это припаркованное транспортное средство, а опасность 73 - это перекрестная дорога, которая пересекается с дорогой рассматриваемого транспортного средства впереди пути рассматриваемого транспортного средства.
[0026]
Настоящая спецификация описывает случай, когда транспортные средства держатся левой стороны. В этом случае одна сторона, более близкая к рассматриваемому транспортному средству 70 из левой и правой сторон дороги рассматриваемого транспортного средства, является левой стороной, тогда как другая сторона, удаленная от рассматриваемого транспортного средства 70, является правой стороной.
Однако настоящее изобретение также применимо к случаю, когда транспортные средства держатся справа. В этом случае одна сторона, более близкая к рассматриваемому транспортному средству 70 из левой и правой сторон дороги рассматриваемого транспортного средства, является правой стороной, тогда как другая сторона, удаленная от рассматриваемого транспортного средства 70, является левой стороной.
[0027]
Когда существует опасность впереди пути рассматриваемого транспортного средства, устройство 2 формирования траектории движения формирует траекторию движения, проходящую мимо опасности с пространством (зазором) от опасности.
Величина зазора предварительно определяется в соответствии с видом опасности. Ссылочные обозначения c1, c2 и c3 соответственно обозначают зазоры, которые должны быть предоставлены для пешехода 71, припаркованного транспортного средства 72 и перекрестной дороги 73.
[0028]
Кроме того, ссылочное обозначение d1 обозначает расстояние между боковым положением p1, удаленным от пешехода 71 зазором c1, и границей дороги на левой стороне дороги рассматриваемого транспортного средства. Точно так же ссылочное обозначение d2 обозначает расстояние между боковым положением p2, удаленным от припаркованного транспортного средства 72 зазором c2, и границей дороги на левой стороне дороги рассматриваемого транспортного средства. Ссылочное обозначение d3 обозначает расстояние между боковым положением p3, удаленным от перекрестной дороги 73 зазором c3, и границей дороги на левой стороне дороги рассматриваемого транспортного средства.
Кроме того, ссылочное обозначение d0 обозначает расстояние между левой конечной частью рассматриваемого транспортного средства 70, когда рассматриваемое транспортное средство 70 находится в текущем боковом положении p0, и границей дороги на левой стороне дороги рассматриваемого транспортного средства.
[0029]
Ссылка будет сделана на фиг. 3. Устройство 2 формирования траектории движения определяет величины m1, m2 и m3 бокового перемещения из текущего бокового положения p0 рассматриваемого транспортного средства для проезда мимо пешехода 71, припаркованного транспортного средства 72 и перекрестной дороги 73 с соответствующими зазорами c1, c2, и c3 от пешехода 71, припаркованного транспортного средства 72 и перекрестной дороги 73 по следующим уравнениям:
m1 = (d1 - d0)
m2 = (d2 - d0)
m3 = (d3 - d0)
[0030]
Величины бокового перемещения m1-m3 определяются в соответствии с типом, положением и величиной опасности. Например, устройство 2 формирования траектории движения определяет величины бокового перемещения, имеющие соотношение величин между пешеходом, двухколесным транспортным средством, припаркованным транспортным средством, перекрестной дорогой и выездом с парковки следующим образом:
(величина бокового перемещения относительно припаркованного транспортного средства) > (величина бокового перемещения относительно двухколесного транспортного средства) > (величина бокового перемещения относительно пешехода) > (величина бокового перемещения относительно перекрестной дороги) > (величина бокового перемещения относительно выезда с парковки)
[0031]
Затем устройство 2 формирования траектории движения формирует траекторию движения, проходящую мимо пешехода 71, припаркованного транспортного средства 72 и перекрестной дороги 73 с зазорами от пешехода 71, припаркованного транспортного средства 72 и перекрестной дороги 73 на основе вычисленных величин бокового перемещения m1-m3.
При этом, когда устройство 2 формирования траектории движения формирует траекторию 74 движения, так что боковые положения левых концевых частей рассматриваемого транспортного средства 70 при проезде мимо перекрестной дороги 73, припаркованного транспортного средства 72 и пешехода 71 становятся p3, p2 и p1, соответственно, рулевое управление происходит каждый раз, когда рассматриваемое транспортное средство 70 проезжает мимо каждой из опасностей 71-73, как показано на фиг. 3, так что плавный проезд не может быть выполнен.
[0032]
Таким образом, устройство 2 формирования траектории движения формирует траекторию движения, проходящую мимо всех из пешехода 71, припаркованного транспортного средства 72 и перекрестной дороги 73, при сохранении бокового положения, перемещаемого на максимальную величину m2 бокового перемещения среди упомянутых определенных величин бокового перемещения m1-m3. Фиг. 4 иллюстрирует пример такой траектории 75 движения. Следует отметить, что устройство 2 формирования траектории движения может формировать траекторию движения, проходящую в боковом положении, перемещенном дальше, чем на величину бокового перемещения m2.
В дальнейшем, траектория движения, проходящая мимо всех из множества опасностей при сохранении бокового положения, перемещаемого на величину, равную или превышающую максимальную величину бокового перемещения среди величин бокового перемещения, определенных с учетом множества опасностей, может быть обозначена как «расширенная траектория проезда».
[0033]
Движение по такой расширенной траектории 75 проезда может снизить частоту руления рассматриваемого транспортного средства при проезде мимо перекрестной дороги 73, припаркованного транспортного средства 72 и пешехода 71, так что может быть выполнен плавный проезд.
В примере на фиг. 4, происходит только одноразовое руление с уклонением для увеличения боковых зазоров от опасностей 71-73 перед проездом мимо перекрестной дороги 73 и одноразовое руление с возвратом для возврата в исходное боковое положение после проезда мимо пешехода 71, так что может быть выполнен плавный проезд.
[0034]
Функциональная структура контроллера 40 в первом варианте осуществления будет описана со ссылкой на фиг. 5. Контроллер 40 включает в себя блок 60 получения информации о дороге рассматриваемого транспортного средства, блок 61 получения информации об опасностях, блок 62 получения сигналов транспортного средства и блок 63 формирования траектории. Функции блока 60 получения информации о дороге рассматриваемого транспортного средства, блока 61 получения информации об опасностях, блока 62 получения сигналов транспортного средства и блока 63 формирования траектории могут быть реализованы, например, путем побуждения процессора 41 контроллера 40 выполнять компьютерную программу, хранящуюся в запоминающем устройстве 42.
[0035]
Блок 60 получения информации о дороге рассматриваемого транспортного средства принимает информацию об окружающей среде, выводимую из группы 10 датчиков окружающей среды, и данные карты дорог, предоставленные из навигационной системы 20.
Блок 60 получения информации о дороге рассматриваемого транспортного средства получает информацию о дороге рассматриваемого транспортного средства, которая является информацией о дороге рассматриваемого транспортного средства, которая является дорогой, по которой движется рассматриваемое транспортное средство 70, из информации окружающей среды и данных карты дорог. Информация о дороге рассматриваемого транспортного средства может включать в себя, например, тип дорожной линии, форму дороги, уклон, количество полос движения, допустимую скорость (ограничение скорости), ширину дороги, правила приоритета и правила остановки дороги рассматриваемого транспортного средства.
Блок 60 получения информации о дороге рассматриваемого транспортного средства выводит информацию о дороге рассматриваемого транспортного средства в блок 63 формирования траектории.
[0036]
Блок 61 получения информации об опасностях принимает информацию об окружающей среде, выводимую из группы 10 датчиков окружающей среды, и данные карты дорог, предоставленные навигационной системой 20.
Блок 61 получения информации об опасностях обнаруживает множество опасностей, соответственно присутствующих на левой стороне дороги рассматриваемого транспортного средства и в различных передних и задних положениях впереди пути рассматриваемого транспортного средства 70, на основе информации об окружающей среде и данных карты дорог, и получает информацию об опасностях, которая представляет собой информацию о множестве опасностей.
Блок 61 получения информации об опасностях включает в себя блок 64 получения информации о перекрестной дороге и блок 65 получения информации об объекте уклонения.
[0037]
Блок 64 получения информации о перекрестной дороге обнаруживает перекрестную дорогу, который пересекается с дорогой рассматриваемого транспортного средства на левой стороне дороги рассматриваемого транспортного средства и впереди пути рассматриваемого транспортного средства 70, на основе информации об окружающей среде и данных карты дорог, и получает в качестве информации об опасности информацию о перекрестной дороге, которая представляет собой информацию об обнаруженной перекрестной дороге. Информация о перекрестной дороге может включать в себя, например, положение, ширину дороги, правило приоритета и правило остановки для перекрестной дороги. Информация о перекрестной дороге также включает в себя информацию о выезде с парковки, который обращен к дороге рассматриваемого транспортного средства.
[0038]
Блок 65 получения информации об объекте уклонения обнаруживает объекты уклонения (например, припаркованное транспортное средство, остановленное транспортное средство, пешеход, двухколесное транспортное средство и временно построенный объект или упавший объект на дороге), присутствующие на левой стороне дороги рассматриваемого транспортного средства и впереди пути рассматриваемого транспортного средства 70 из информации об окружающей среде, и получает в качестве информации об опасности информацию об объекте уклонения, которая является информацией об обнаруженных объектах уклонения. Информация об объекте уклонения может включать в себя информацию, такую как положение, поперечная ширина, типы и т.п. объектов уклонения.
Блок 61 получения информации об опасностях выводит информацию о перекрестной дороге и информацию об объекте уклонения в блок 63 формирования траектории.
[0039]
Блок 62 получения сигналов транспортного средства получает сигнал транспортного средства, который является информацией о рассматриваемом транспортном средстве 70, из информации датчиков, выводимой из группы 30 датчиков транспортного средства, и информации о текущем положении рассматриваемого транспортного средства 70, предоставленной из навигационной системы 20. Сигнал транспортного средства может быть сигналом, который указывает, например, скорость и текущее положение рассматриваемого транспортного средства. Блок 62 получения сигналов транспортного средства выводит сигнал транспортного средства в блок 63 формирования траектории.
Блок 63 формирования траектории формирует траекторию движения, по которой предписывается двигаться рассматриваемому транспортному средству, на основе информации об окружающей среде, выводимой из группы 10 датчиков окружающей среды, данных карты дорог, предоставленных навигационной системой 20, маршрута движения, установленного с помощью навигационной системы 20, информации о дороге рассматриваемого транспортного средства, информации о перекрестной дороге, информации об объекте уклонения и сигнала транспортного средства.
[0040]
Когда опасности обнаруживаются на левой стороне дороги рассматриваемого транспортного средства и впереди пути рассматриваемого транспортного средства 70, блок 63 формирования траектории формирует траекторию движения, проходящую мимо обнаруженных опасностей с зазорами от опасностей. Блок 63 формирования траектории включает в себя блок 66 установки величины бокового перемещения и блок 67 установки положения руления.
Блок 66 установки величины бокового перемещения вычисляет величины бокового перемещения для поддержания зазоров от обнаруженных опасностей. Блок 67 установки положения руления устанавливает начальное положение руления для проезда мимо обнаруженных опасностей путем перемещения на установленную величину бокового перемещения.
Блок 63 формирования траектории формирует траекторию движения, проходящую мимо опасностей, на основе вычисленных величин бокового перемещения и установленного начального положения руления. Блок 63 формирования траектории выдает сформированную траекторию движения в контроллер 50 управления движением.
[0041]
Когда множество опасностей 71-73, соответственно, обнаруживается в разных передних и задних положениях, блок 66 установки величины бокового перемещения определяет каждую из величин бокового перемещения m1-m3 рассматриваемого транспортного средства 70 для проезда мимо множества опасностей 71-73 с зазорами c1-c3 от множества опасностей 71-73 в соответствии с боковыми положениями и типами множества опасностей 71-73.
Блок 66 установки величины бокового перемещения выбирает максимальную величину m2 бокового перемещения из числа упомянутых определенных величин бокового перемещения m1-m3.
[0042]
Блок 67 установки положения руления устанавливает начальное положение руления для проезда мимо всех из множества опасностей 71-73 в боковом положении, перемещенном на максимальную величину бокового перемещения m2 или более. Начальное положение руления включает в себя начальное положение руления с уклонением для увеличения боковых зазоров от множества опасностей 71-73 перед множеством опасностей 71-73 и начальное положение руления с возвратом для возврата в исходное боковое положение после проезда мимо всех из множества опасностей 71-73.
Блок 63 формирования траектории формирует расширенную траекторию 75 проезда, которая проходит мимо всех из множества опасностей 71-73 в боковом положении, перемещенном на максимальную величину бокового перемещения m2 или более, на основе установленного начального положения руления и максимальной величины бокового перемещения m2.
[0043]
(Работа)
Далее будет описана работа устройства 1 помощи при вождении в первом варианте осуществления. Ссылка будет сделана на фиг. 6.
На этапе S1 блок 61 получения информации об опасностях обнаруживает множество опасностей 71-73, соответственно, присутствующих на левой стороне дороги рассматриваемого транспортного средства и в различных передних и задних положениях впереди пути рассматриваемого транспортного средства 70.
На этапе S2 блок 66 установки величины бокового перемещения определяет каждую из величин бокового перемещения m1-m3 рассматриваемого транспортного средства 70 для проезда мимо множества опасностей 71-73 с зазорами c1-c3 от множества опасностей 71-73 в соответствии с типами множества опасностей 71-73.
[0044]
На этапе S3 блок 66 установки величины бокового перемещения выбирает максимальную величину бокового перемещения m2 из числа упомянутых определенных величин бокового перемещения m1-m3.
На этапе S4 блок 63 формирования траектории формирует расширенную траекторию 75 проезда, проходящую мимо всех из множества опасностей 71-73 в боковом положении, перемещенном на максимальную величину бокового перемещения m2 или более.
На этапе S5 контроллер 50 управления движением приводит в действие группу 51 исполнительных механизмов управления транспортным средством, так что рассматриваемое транспортное средство 70 движется по расширенной траектории 75 проезда, формируемой блоком 63 формирования траектории, тем самым заставляя рассматриваемое транспортное средство 70 двигаться автоматически.
[0045]
(Эффекты первого варианта осуществления)
Блок 61 получения информации об опасностях обнаруживает множество опасностей 71-73, соответственно, присутствующих на левой стороне дороги рассматриваемого транспортного средства и в различных передних и задних положениях впереди пути рассматриваемого транспортного средства 70. Блок 66 установки величины бокового перемещения определяет каждую из величин бокового перемещения m1-m3 рассматриваемого транспортного средства 70 для проезда мимо множества опасностей 71-73 с зазорами c1-c3 от множества опасностей 71-73 в соответствии с типами множественность опасностей 71-73. Блок 63 формирования траектории формирует расширенную траекторию проезда, которая проходит мимо всех из множества опасностей 71-73 в боковом положении, перемещенном на максимальную величину бокового перемещения m2 или более.
Формирование такой расширенной траектории проезда может снизить частоту руления рассматриваемым транспортным средством при проезде мимо множества опасностей 71-73, так что может быть выполнен плавный проезд.
[0046]
(Второй вариант осуществления)
Далее будет описан второй вариант осуществления. Когда обнаруженное множество опасностей находится на расстоянии друг от друга, нежелательно продолжать движение по участку между опасностями, сохраняя при этом боковое положение, даже после проезда мимо предыдущей опасности (т.е. без перемещения к одной стороне дороги).
Например, фиг. 7 иллюстрирует случай, когда расстояние D между перекрестной дорогой 73, которая является одной из множества опасностей, и припаркованным транспортным средством 72, которое является другой из множества опасностей, велико. В таком случае нежелательно продолжать движение по участку между перекрестной дорогой 73 и припаркованным транспортным средством 72, сохраняя при этом боковое положение, перемещенное на величину бокового перемещения m2 или более.
[0047]
Кроме того, когда дорога рассматриваемого транспортного средства не имеет приоритета над перекрестной дорогой 73 (когда дорога рассматриваемого транспортного средства не является приоритетной дорогой), рассматриваемое транспортное средство 70 временно останавливается перед въездом на перекресток. Например, фиг. 8 иллюстрирует случай, когда предусмотрена линия 77 временной остановки и дорога рассматриваемого транспортного средства не имеет приоритета над перекрестной дорогой 73. В таком случае, поскольку рассматриваемое транспортное средство 70 останавливается на линии 77 временной остановки, нет необходимости увеличивать расстояние от перекрестной дороги 73 для проезда через перекресток.
Более того, когда заранее известно, что нет другого транспортного средства, которое въезжает на дорогу рассматриваемого транспортного средства со стороны перекрестной дороги 73, также нет необходимости увеличивать зазор от перекрестной дороги 73, чтобы проехать через перекресток.
[0048]
Соответственно, устройство 2 формирования траектории движения по второму варианту осуществления определяет, создавать или нет расширенную траекторию проезда, на основе позиционного отношения между перекрестком, который является одной из множества опасностей, и другой опасностью из множества опасностей.
Например, когда расстояние D между перекрестной дорогой 73 и припаркованным транспортным средством 72 находится в пределах заранее определенного диапазона, формируется расширенная траектория проезда, которая проходит мимо перекрестной дороги 73 и припаркованного транспортного средства 72.
С другой стороны, когда расстояние D не находится в пределах заранее определенного диапазона, формируется траектория 76 движения, в которой траектория движения, проходящая с зазором c3 от перекрестной дороги 73, и траектория движения, проходящая с зазором c2 от припаркованного транспортного средства 72, формируются отдельно, как показано на фиг. 7.
[0049]
Кроме того, когда дорога рассматриваемого транспортного средства имеет приоритет над перекрестной дорогой 73, формируется расширенная траектория проезда, проходящая мимо перекрестной дороги 73 и припаркованного транспортного средства 72.
С другой стороны, когда дорога рассматриваемого транспортного средства не имеет приоритета над перекрестной дорогой 73, формируется траектория движения, проходящая мимо припаркованного транспортного средства 72, путем увеличения только зазора от припаркованного транспортного средства 72, как проиллюстрировано на фиг. 8.
Точно так же, когда есть другое транспортное средство, которое въезжает на дорогу рассматриваемого транспортного средства с перекрестной дороги 73, формируется расширенная траектория проезда, проходящая как мимо перекрестной дороги 73, так и мимо припаркованного транспортного средства 72.
[0050]
С другой стороны, когда нет другого транспортного средства, которое въезжает на дорогу рассматриваемого транспортного средства с перекрестной дороги 73, формируется траектория движения, проходящая мимо припаркованного транспортного средства 72, за счет увеличения только зазора от припаркованного транспортного средства 72.
Обратите внимание, что фиг. 7 и 8 иллюстрируют случай, когда перекрестная дорога 73 присутствует впереди пути рассматриваемого транспортного средства 70 и ближе к рассматриваемому транспортному средству 70, чем другая опасность 72. Однако то же самое относится к случаю, когда перекрестная дорога 73 присутствует впереди пути рассматриваемого транспортного средства 70 и дальше от рассматриваемого транспортного средства 70, чем другая опасность 72.
[0051]
Функциональная структура контроллера 40 во втором варианте осуществления будет описана со ссылкой на фиг. 9. Те же составные элементы, что и в первом варианте осуществления, обозначены теми же ссылочными обозначениями, и описание тех же функций опускается.
Контроллер 40 включает в себя блок 68 определения относительного позиционного отношения и блок 69 определения приоритета. Функции блока 68 определения относительного позиционного отношения и блока 69 определения приоритета могут быть реализованы, например, путем предписывания процессору 41 контроллера 40 выполнять компьютерную программу, хранящуюся в запоминающем устройстве 42.
[0052]
Блок 68 определения относительного позиционного отношения принимает позиционную информацию перекрестной дороги, которая является одной из множества опасностей, соответственно присутствующих на левой стороне дороги рассматриваемого транспортного средства и в различных передних и задних положениях впереди пути рассматриваемого транспортного средства 70, из блока 61 получения информации об опасностях. Кроме того, блок 68 определения относительного позиционного отношения принимает позиционную информацию об опасности, отличной от перекрестной дороги, во множестве опасностей от блока 61 получения информации об опасностях.
Блок 68 определения относительного позиционного отношения определяет позиционное отношение между перекрестной дорогой и другой опасностью. Например, определяется, находится ли расстояние D между перекрестной дорогой и другой опасностью в пределах заранее определенного диапазона.
[0053]
Заранее определенный диапазон может быть определен, например, в соответствии со временем допуска столкновения с учетом опасности. Например, когда момент времени, в который начинается руление для избегания единственной опасности, устанавливается на момент времени, в который время допуска столкновения составляет t секунд, заранее определенный диапазон может быть определен на основе момента времени начала руления.
Например, предполагая, что скорость транспортного средства рассматриваемого транспортного средства 70 равна V, предварительно определенный диапазон может быть установлен в диапазоне от Vt до 2Vt.
Блок 68 определения относительного позиционного отношения выводит результат определения в блок 63 формирования траектории.
[0054]
Блок 69 определения приоритета принимает информацию о правиле приоритета и/или правиле остановки для дороги рассматриваемого транспортного средства от блока 60 получения информации о дороге рассматриваемого транспортного средства. Кроме того, блок 69 определения приоритета принимает информацию о правиле приоритета и/или правиле остановки для перекрестной дороги от блока 64 получения информации о перекрестной дороге.
Блок 69 определения приоритета определяет порядок приоритета между перекрестной дорогой и дорогой рассматриваемого транспортного средства и выводит результат определения в блок 63 формирования траектории.
Блок 63 формирования траектории определяет, следует ли формировать расширенную траекторию проезда, проходящую мимо перекрестной дороги и другой опасности, на основе позиционного отношения между перекрестной дорогой и другой опасностью, определяемого блоком 68 определения относительного позиционного отношения.
Например, блок 63 формирования траектории может формировать расширенную траекторию проезда, проходящую мимо перекрестной дороги и другой опасности, когда расстояние D между перекрестной дорогой и другой опасностью находится в пределах предварительно определенного диапазона.
[0055]
Напротив, когда расстояние D между перекрестной дорогой и другой опасностью выходит за пределы предварительно определенного диапазона, блок 63 формирования траектории может формировать, например, траекторию движения, в которой траектория движения, проходящая с зазором от перекрестной дороги, и траектория движения, проходящая с зазором от припаркованного транспортного средства, формируются отдельно.
Кроме того, блок 63 формирования траектории определяет, следует ли формировать расширенную траекторию проезда, проходящую мимо перекрестной дороги и другой опасности, на основе того, имеет ли дорога рассматриваемого транспортного средства приоритет над перекрестной дорогой.
[0056]
Например, когда дорога рассматриваемого транспортного средства имеет приоритет над перекрестной дорогой, блок 63 формирования траектории может формировать расширенную траекторию проезда, проходящую мимо перекрестной дороги и другой опасности.
Напротив, когда дорога рассматриваемого транспортного средства не имеет приоритета над перекрестной дорогой, блок 63 формирования траектории может формировать, например, траекторию движения, проходящую мимо, посредством увеличения только зазора от другой опасности.
[0057]
Кроме того, блок 63 формирования траектории определяет, следует ли формировать расширенную траекторию проезда, проходящую мимо перекрестной дороги и другой опасности, на основе того, есть ли другое транспортное средство, которое въезжает на дорогу рассматриваемого транспортного средства с перекрестной дороги 73.
Например, блок 63 формирования траектории может формировать расширенную траекторию проезда, проходящую мимо перекрестной дороги и других опасностей, когда есть другое транспортное средство, которое въезжает на дорогу рассматриваемого транспортного средства с перекрестной дороги 73.
Напротив, когда нет другого транспортного средства, которое въезжает на дорогу рассматриваемого транспортного средства с перекрестной дороги 73, блок 63 формирования траектории может формировать, например, траекторию движения, проходящую мимо, посредством увеличения только зазора от другой опасности.
[0058]
(Работа)
Далее будет описана работа устройства 1 помощи при вождении во втором варианте осуществления. Ссылка будет сделана на фиг. 10.
На этапе S10 блок 60 получения информации о дороге рассматриваемого транспортного средства получает информацию о дороге рассматриваемого транспортного средства, включая информацию о правиле приоритета и/или правиле остановки для дороги рассматриваемого транспортного средства.
На этапе S11 блок 64 получения информации о перекрестной дороге обнаруживает в качестве опасности перекрестную дорогу, который пересекается с дорогой рассматриваемого транспортного средства на левой стороне дороги рассматриваемого транспортного средства и впереди пути рассматриваемого транспортного средства 70, и получает информацию о перекрестной дороге, включая информацию о положении перекрестной дороги и правиле приоритета и/или правиле остановки для нее. Кроме того, блок 61 получения информации об опасностях обнаруживает другую опасность, присутствующую на левой стороне дороги рассматриваемого транспортного средства и впереди пути рассматриваемого транспортного средства 70, и получает положение другой опасности. Когда другая опасность представляет собой объект уклонения, может быть получена информация о поперечной ширине объекта уклонения.
[0059]
На этапе S12 блок 69 определения приоритета определяет, имеет ли дорога рассматриваемого транспортного средства приоритет над перекрестной дорогой на основе правил приоритета и/или правил остановки для дороги рассматриваемого транспортного средства и перекрестной дороги.
Когда дорога рассматриваемого транспортного средства имеет приоритет над перекрестной дорогой (этап S12: Y), обработка переходит к этапу S13. Когда дорога рассматриваемого транспортного средства не имеет приоритета над перекрестной дорогой (этап S12: N), обработка переходит к этапу S18.
[0060]
На этапе S13 блок 63 формирования траектории определяет, есть ли какое-либо другое транспортное средство, которое въезжает на дорогу рассматриваемого транспортного средства с перекрестной дороги.
Когда есть другое транспортное средство, которое въезжает на дорогу рассматриваемого транспортного средства с перекрестной дороги (этап S13: Y), обработка переходит к этапу S14. Когда нет другого транспортного средства, которое въезжает на дорогу рассматриваемого транспортного средства с перекрестной дороги (этап S13: N), обработка переходит к этапу S18.
[0061]
На этапе S14 блок 68 определения относительного позиционного отношения определяет, находится ли расстояние D между перекрестной дорогой и другой опасностью в пределах предварительно определенного диапазона. Когда расстояние D находится в пределах предварительно определенного диапазона (этап S14: Y), обработка переходит к этапу S15. Когда расстояние D выходит за пределы предварительно определенного диапазона (этап S14: N), обработка переходит к этапу S19.
[0062]
На этапе S15 блок 66 установки величины бокового перемещения определяет каждую величину бокового перемещения рассматриваемого транспортного средства для проезда мимо перекрестной дороги и другой опасности с зазорами от перекрестной дороги и другой опасности.
На этапе S16 блок 66 установки величины бокового перемещения выбирает максимальную величину бокового перемещения из числа упомянутых определенных величин бокового перемещения.
На этапе S17 блок 63 формирования траектории формирует расширенную траекторию проезда, проходящую мимо всех из множества опасностей в боковом положении, перемещенном на выбранную максимальную величину бокового перемещения или более. Затем обработка переходит к этапу S20.
[0063]
Когда дорога рассматриваемого транспортного средства не имеет приоритета над перекрестной дорогой (этап S12: N) или когда нет другого транспортного средства, которое въезжает на дорогу рассматриваемого транспортного средства с перекрестной дороги (этап S13: N), блок 63 формирования траектории формирует на этапе S18 траекторию движения, проходящую мимо, только за счет увеличения зазора от другой опасности. Затем обработка переходит к этапу S20.
Когда расстояние D между перекрестной дорогой и другой опасностью выходит за пределы предварительно определенного диапазона (этап S14: N), модуль 63 формирования траектории формирует на этапе S19 траекторию движения, в которой отдельно формируются траектория движения, проходящая с зазором от перекрестной дороги, и траектория движения, проходящая с зазором от другой опасности. Затем обработка переходит к этапу S20.
На этапе S20 контроллер 50 управления движением приводит в действие группу 51 исполнительных механизмов управления транспортным средством, так что рассматриваемое транспортное средство 70 движется по расширенной траектории проезда, формируемой блоком 63 формирования траектории, тем самым заставляя рассматриваемое транспортное средство 70 двигаться автоматически.
[0064]
(Эффекты второго варианта осуществления)
(1) Блок 64 получения информации о перекрестной дороге обнаруживает, как любую из множества опасностей, перекрестную дорогу, которая пересекается с дорогой рассматриваемого транспортного средства на левой стороне дороги рассматриваемого транспортного средства и впереди пути рассматриваемого транспортного средства. Блок 63 формирования траектории определяет, следует ли формировать расширенную траекторию проезда, проходящую мимо множества опасностей, на основе позиционного отношения между опасностью, отличной от перекрестной дороги во множестве опасностей, и перекрестной дорогой.
Это может помешать рассматриваемому транспортному средству продолжать движение по участку между перекрестной дорогой и другой опасностью, сохраняя при этом боковое положение (без перемещения к одной стороне дороги) даже после проезда мимо предыдущей опасности, когда расстояние между перекрестной дорогой и другой опасностью - велико.
[0065]
(2) Блок 63 формирования траектории отличается тем, что формирует расширенную траекторию проезда, проходящую мимо множества опасностей, когда расстояние D между другой опасностью и перекрестной дорогой находится в пределах предварительно определенного диапазона.
Это может помешать рассматриваемому транспортному средству продолжать движение по участку между перекрестной дорогой и другой опасностью, сохраняя при этом боковое положение (без перемещения к одной стороне дороги) даже после проезда мимо предыдущей опасности, когда расстояние между перекрестной дорогой и другой опасностью - велико.
[0066]
(3) Когда дорога рассматриваемого транспортного средства имеет приоритет над перекрестной дорогой, блок 63 формирования траектории формирует расширенную траекторию проезда, проходящую мимо множества опасностей.
Когда дорога рассматриваемого транспортного средства не имеет приоритета над перекрестной дорогой, рассматриваемое транспортное средство 70 временно останавливается перед въездом на перекресток, так что нет необходимости увеличивать зазор от перекрестной дороги, чтобы проехать через перекресток.
Формирование расширенной траектории проезда, когда рассматриваемое транспортное средство имеет приоритет над перекрестной дорогой, может предотвратить движение с излишне увеличенным зазором от левой стороны дороги рассматриваемого транспортного средства.
[0067]
(4) Когда имеется транспортное средство, которое въезжает на дорогу рассматриваемого транспортного средства с перекрестной дороги, блок 63 формирования траектории формирует расширенную траекторию проезда, проходящую мимо множества опасностей.
Когда нет транспортного средства, которое въезжает на дорогу рассматриваемого транспортного средства с перекрестной дороги, нет необходимости увеличивать зазор от перекрестной дороги, чтобы проехать через перекресток.
Формирование расширенной траектории проезда, когда есть транспортное средство, которое въезжает на дорогу рассматриваемого транспортного средства с перекрестной дороги, может предотвратить движение с излишне увеличенным зазором от левой стороны дороги рассматриваемого транспортного средства.
[0068]
(Третий вариант)
Далее будет описан третий вариант осуществления. Обычно, когда существует опасность на левой стороне дороги рассматриваемого транспортного средства и впереди пути рассматриваемого транспортного средства, начальное положение руления для запуска руления, которое сопровождает проезд мимо опасности, устанавливается на основе положения опасности.
Обратите внимание, что руление, сопровождающее проезд мимо опасности, может включать в себя руление (т.е. руление с уклонением) для увеличения бокового зазора от опасности перед проездом мимо опасности и руление (т.е. руление с возвратом) для возврата в исходное боковое положение после проезда мимо опасности.
[0069]
Однако рядом с опасностью может быть перекрестная дорога, как в приведенном выше описании.
В этом случае, учитывая возможность того, что другое транспортное средство может выехать на дорогу рассматриваемого транспортного средства с перекрестной дороги, предпочтительно проехать перекресток с зазором от перекрестной дороги.
Таким образом, для проезда через перекресток с зазором от перекрестной дороги, а также от опасности, необходимо установить начальное положение руления на основе положения перекрестной дороги.
[0070]
Здесь, в зависимости от того, находится ли перекрестная дорога на левой стороне или правой стороне дороги рассматриваемого транспортного средства, направление бокового перемещения, в котором увеличивается зазор от перекрестной дороги, различается.
Когда перекрестная дорога находится на левой стороне дороги рассматриваемого транспортного средства, зазор от перекрестной дороги увеличивается за счет смещения бокового положения рассматриваемого транспортного средства в правую сторону, как и в случае другого множества опасностей на левой стороне дороги. дороги рассматриваемого транспортного средства.
С другой стороны, когда перекрестная дорога находится на правой стороне дороги рассматриваемого транспортного средства, перемещение бокового положения рассматриваемого транспортного средства в правую сторону сужает зазор от перекрестной дороги. Из-за этого может быть невозможно проехать с достаточным зазором от перекрестной дороги.
[0071]
Таким образом, в соответствии с тем, находится ли перекрестная дорога, пересекающаяся с дорогой рассматриваемого транспортного средства впереди пути рассматриваемого транспортного средства, на левой стороне или правой стороне дороги рассматриваемого транспортного средства, устройство 2 формирования траектории движения третьего варианта осуществления переключает начальное положение руления на расширенной траектории проезда, проходящей мимо множества опасностей с левой стороны дороги рассматриваемого транспортного средства и впереди пути рассматриваемого транспортного средства.
Ссылка будет сделана на фиг. 11. Например, когда перекрестная дорога 73 находится на левой стороне дороги рассматриваемого транспортного средства и ближе к рассматриваемому транспортному средству 70, чем множество опасностей 71 и 72, устройство 2 формирования траектории движения переключает начальное положение руления (руление с уклонением) для увеличения боковых зазоров от множества опасностей 71 и 72 перед проездом мимо множества опасностей 71 и 72 из положения, установленного на основе опасности 72, в положение p10 ближе к рассматриваемому транспортному средству 70, чем перекрестная дорога 73.
Таким образом, начало руления для увеличения боковых зазоров от множества опасностей 71 и 72 на левой стороне дороги рассматриваемого транспортного средства перед проездом мимо перекрестной дороги 73 на левой стороне дороги рассматриваемого транспортного средства обеспечивает проезд с достаточным зазором от перекрестной дороги 73.
[0072]
Ссылка будет сделана на фиг. 12. Когда перекрестная дорога 73 находится на правой стороне дороги рассматриваемого транспортного средства и ближе к рассматриваемому транспортному средству 70, чем множество опасностей 71 и 72, устройство 2 формирования траектории движения переключает начальное положение руления для увеличения боковых зазоров от множества опасностей 71 и 72 перед проездом мимо множества опасностей 71 и 72 из положения, установленного на основе опасности 72, в положение p11 дальше от рассматриваемого транспортного средства 70, чем перекрестная дорога 73.
Таким образом, начало руления для увеличения боковых зазоров от множества опасностей 71 и 72 на левой стороне дороги рассматриваемого транспортного средства после проезда мимо перекрестной дороги 73 на правой стороне дороги рассматриваемого транспортного средства обеспечивает проезд с достаточным зазором от перекрестной дороги 73.
[0073]
Ссылка будет сделана на фиг. 13. Например, когда перекрестная дорога 73 находится на левой стороне дороги рассматриваемого транспортного средства и дальше от рассматриваемого транспортного средства 70, чем множество опасностей 71 и 72, устройство 2 формирования траектории движения переключает начальное положение руления (руление с возвратом) для возврата в исходное боковое положение после проезда мимо множества опасностей 71 и 72 из положения, установленного на основе опасности 71, в положение p12, дальше от рассматриваемого транспортного средства 70, чем перекрестная дорога 73.
Таким образом, начало руления для возврата в исходное боковое положение после проезда мимо перекрестной дороги 73 с левой стороны дороги рассматриваемого транспортного средства обеспечивает проезд с достаточным зазором от перекрестной дороги 73.
[0074]
Ссылка будет сделана на фиг. 14. Например, когда перекрестная дорога 73 находится на правой стороне дороги рассматриваемого транспортного средства и дальше от рассматриваемого транспортного средства 70, чем множество опасностей 71 и 72, устройство 2 формирования траектории движения переключает начальное положение руления для возврата в исходное боковое положение после проезда мимо множества опасностей 71 и 72 из положения, установленного на основе опасности 71, в положение p13 ближе к рассматриваемому транспортному средству 70, чем перекрестная дорога 73.
Таким образом, включение руления для возврата в исходное боковое положение перед проездом мимо перекрестной дороги 73 на правой стороне дороги рассматриваемого транспортного средства обеспечивает проезд с достаточным зазором от перекрестной дороги 73.
[0075]
Обратите внимание, что когда перекрестная дорога находится на левой стороны от дороги рассматриваемого транспортного средства (случаи, проиллюстрированные на фиг. 11 и 13), устройство 2 формирования траектории движения может определять величину бокового перемещения по расширенной траектории 75 проезда на основе не только величин бокового перемещения m1 и m2, определенных для множества опасностей 71 и 72, но также и величины бокового перемещения m3, определенной относительно перекрестной дороги 73.
Другими словами, устройство 2 формирования траектории движения может формировать расширенную траекторию 75 проезда, проходящую мимо всех из множества опасностей 71 и 72 и перекрестной дороги 73, при сохранении бокового положения, перемещенного на величину, равную или превышающую максимальную величину бокового перемещения среди величин боковых перемещений m1-m3.
[0076]
Ссылка будет сделана на фиг. 15. Когда множество опасностей 71 и 72 и перекрестная дорога 73 удалены друг от друга, нежелательно продолжать движение от перекрестной дороги 73 к множеству опасностей 71 и 72, не возвращаясь к левой стороне дороги.
Например, когда расстояние D между перекрестной дорогой 73 и припаркованным транспортным средством 72, которое является одной из множества опасностей, велико, нежелательно продолжать движение по участку между перекрестной дорогой 73 и припаркованным транспортным средством 72 при сохранении бокового положения, перемещенного на величину бокового перемещения m2 или более.
[0077]
Следовательно, на основе позиционных соотношений между перекрестной дорогой 73 и множеством опасностей 71 и 72 устройство 2 формирования траектории движения по третьему варианту осуществления определяет, следует ли переключать начальное положение руления из положения, установленного на основе один из множества опасностей 71 и 72, в положение, заданное на основе перекрестной дороги 73.
Например, когда расстояние D между опасностью 72, ближайшей к перекрестной дороге 73 во множестве опасностей 71 и 72, и перекрестной дорогой 73 находится в пределах предварительно определенного диапазона, устройство 2 формирования траектории движения переключает начальное положение руления в положение, установленное на основе перекрестной дороги 73.
[0078]
Например, когда перекрестная дорога находится на левой стороне дороги рассматриваемого транспортного средства и расстояние D находится в пределах диапазона от Vt до 2Vt, описанного выше, устройство 2 формирования траектории движения может переключить начальное положение руления в положение P10 (см. фиг.11), установленное на основе перекрестной дороги 73.
С другой стороны, когда расстояние D выходит за пределы предварительно определенного диапазона, устройство 2 формирования траектории движения формирует расширенную траекторию 75 проезда для начала руления из положения p14 (см. Фиг. 15), установленного на основе опасности 72 ближайшей к перекрестной дороге 73.
[0079]
Ссылка будет сделана на фиг. 16. Когда перекрестная дорога 73 находится на правой стороне дороги рассматриваемого транспортного средства и близко к множеству опасностей 71 и 72, происходит внезапное руление, если руление начинается после проезда мимо перекрестной дороги 73.
В связи с этим, когда расстояние D не находится в пределах предварительно определенного диапазона, устройство 2 формирования траектории движения формирует расширенную траекторию 75 проезда для начала руления из положения p15, установленного на основе опасности 72, ближайшей к перекрестной дороге 73.
[0080]
Например, когда перекрестная дорога находится на правой стороне дороги рассматриваемого транспортного средства, устройство 2 формирования траектории движения может определять предварительно определенный диапазон на основе запретной для парковки зоны (в пределах 5 м от перекрестка), определенной в окрестностях перекрестка по закону. Например, когда расстояние D находится в диапазоне от 5 м до Vt, устройство 2 формирования траектории движения может переключить начальное положение руления в положение p11 (см. Фиг. 12), установленное на основе перекрестной дороги 73, и когда расстояние D находится за пределами диапазона, может формировать расширенную траекторию 75 проезда для начала руления из положения p15 (см. фиг. 16), установленного на основе опасности 72.
Фиг. 15 и 16 иллюстрируют случаи, когда перекрестная дорога 73 находится впереди пути рассматриваемого транспортного средства 70 и ближе к рассматриваемому транспортному средству 70, чем опасности 71 и 72. Однако то же самое относится к случаям, когда перекрестная дорога 73 находится впереди пути рассматриваемого транспортного средства 70 и дальше от рассматриваемого транспортного средства 70, чем опасности 71 и 72.
[0081]
Кроме того, когда дорога рассматриваемого транспортного средства не имеет приоритета над перекрестной дорогой 73 (дорога рассматриваемого транспортного средства не является приоритетной дорогой), рассматриваемое транспортное средство 70 временно останавливается перед въездом на перекресток. Например, как показано на фиг. 17, когда предусмотрена линия 77 временной остановки и дорога рассматриваемого транспортного средства не имеет приоритета над перекрестной дорогой 73, рассматриваемое транспортное средство 70 останавливается на линии 77 временной остановки. В этом случае нет необходимости увеличивать зазор от перекрестной дороги 73 на левой стороне дороги рассматриваемого транспортного средства, чтобы проехать перекресток.
Более того, даже когда заранее известно, что нет другого транспортного средства, которое въезжает на дорогу рассматриваемого транспортного средства с перекрестной дороги 73, нет необходимости увеличивать зазор от перекрестной дороги 73 на левой стороне дороги рассматриваемого транспортного средства для проезда через перекресток.
[0082]
Таким образом, когда перекрестная дорога 73 на левой стороне дороги рассматриваемого транспортного средства ближе к рассматриваемому транспортному средству 70, чем множество опасностей 71 и 72, и дорога рассматриваемого транспортного средства имеет приоритет над перекрестной дорогой 73, устройство 2 формирования траектории движения согласно третьему варианту осуществления переключает начальное положение руления в положение p10 (см. фиг. 11) ближе к рассматриваемому транспортному средству 70, чем перекрестная дорога 73.
С другой стороны, когда перекрестная дорога 73 находится ближе к рассматриваемому транспортному средству 70, чем множество опасностей 71 и 72, и дорога рассматриваемого транспортного средства не имеет приоритета над перекрестной дорогой 73, устройство 2 формирования траектории движения устанавливает начальное положение руления p16 (см. фиг.17) дальше от рассматриваемого транспортного средства 70, чем перекрестная дорога 73.
[0083]
Кроме того, когда перекрестная дорога 73 на левой стороне дороги рассматриваемого транспортного средства дальше от рассматриваемого транспортного средства 70, чем множество опасностей 71 и 72, и дорога рассматриваемого транспортного средства имеет приоритет над перекрестной дорогой 73, устройство 2 формирования траектории движения переключает начальное положение руления в положение p12 (см. Фиг. 13) дальше от рассматриваемого транспортного средства 70, чем перекрестная дорога 73.
С другой стороны, когда перекрестная дорога 73 находится дальше от транспортного средства 70, чем множество опасностей 71 и 72, и дорога рассматриваемого транспортного средства не имеет приоритета над перекрестной дорогой 73, устройство 2 формирования траектории движения устанавливает начальное положение руления ближе к рассматриваемому транспортному средству 70, чем перекрестная дорога 73.
[0084]
Кроме того, когда перекрестная дорога 73 на левой стороне дороги рассматриваемого транспортного средства ближе к рассматриваемому транспортному средству 70, чем множество опасностей 71 и 72, и есть другое транспортное средство, которое въезжает на дорогу рассматриваемого транспортного средства с перекрестной дорогм 73, устройство 2 формирования траектории движения переключает начальное положение руления в положение ближе к рассматриваемому транспортному средству 70, чем перекрестная дорога 73.
С другой стороны, когда перекрестная дорога 73 находится ближе к рассматриваемому транспортному средству 70, чем множество опасностей 71 и 72, и нет другого транспортного средства, которое въезжает на дорогу рассматриваемого транспортного средства с перекрестной дороги 73, устройство 2 формирования траектории движения устанавливает начальное положение руления в положение дальше от рассматриваемого транспортного средства 70, чем перекрестная дорога 73.
Кроме того, когда перекрестная дорога 73 на левой стороне дороги рассматриваемого транспортного средства дальше от рассматриваемого транспортного средства 70, чем множество опасностей 71 и 72, и есть другое транспортное средство, которое въезжает на дорогу рассматриваемого транспортного средства с перекрестной дороги 73, устройство 2 формирования траектории движения переключает начальное положение руления в положение дальше от рассматриваемого транспортного средства 70, чем перекрестная дорога 73.
С другой стороны, когда перекрестная дорога 73 находится дальше от рассматриваемого транспортного средства 70, чем множество опасностей 71 и 72, и нет другого транспортного средства, которое въезжает на дорогу рассматриваемого транспортного средства с перекрестной дороги 73, устройство 2 формирования траектории движения устанавливает положение начала руления в положение ближе к рассматриваемому транспортному средству 70, чем перекрестная дорога 73.
[0085]
Далее будет дано описание функциональной структуры контроллера 40 в третьем варианте осуществления. Функциональная структура контроллера 40 в третьем варианте осуществления такая же, как функциональная структура второго варианта осуществления, показанного на фиг. 9.
Блок 68 определения относительного позиционного отношения принимает позиционную информацию о перекрестной дороге 73, которая пересекается с дорогой рассматриваемого транспортного средства на левой стороне дороги рассматриваемого транспортного средства и впереди пути рассматриваемого транспортного средства 70, от блока 64 получения информации о перекрестной дороге.
Кроме того, блок 68 определения относительного позиционного отношения принимает позиционную информацию множества опасностей 71 и 72 от блока 61 получения информации об опасностях.
[0086]
Блок 68 определения относительного позиционного отношения определяет позиционные отношения между перекрестной дорогой 73 и множеством опасностей 71 и 72. Например, блок 68 определения относительного позиционного отношения определяет, находится ли расстояние D между опасностью из множества опасностей 71 и 72, ближайшей к перекрестной дороге 73, и перекрестной дорогой 73 в пределах заранее определенного диапазона.
Блок 68 определения относительного позиционного отношения выводит результат определения в блок 63 формирования траектории.
Блок 69 определения приоритета определяет порядок приоритета между перекрестной дорогой и дорогой рассматриваемого транспортного средства и выводит результат определения в блок 63 формирования траектории.
[0087]
На основе позиционных отношений между перекрестной дорогой 73 и множеством опасностей 71 и 72, определенных блоком 68 определения относительного позиционного отношения, блок 63 формирования траектории определяет, следует ли переключать начальное положение руления с положения, установленного на основе одной из множества опасностей 71 и 72, в положение, установленное на основе перекрестной дороги 73.
Например, когда расстояние D между опасностью из множества опасностей 71 и 72, ближайшей к перекрестной дороге 73, и перекрестной дорогой 73 не находится в пределах предварительно определенного диапазона, устройство 2 формирования траектории движения устанавливает начальное положение руления на основе опасности из множества опасностей 71 и 72, ближайшей к перекрестной дороге 73.
[0088]
Кроме того, когда дорога рассматриваемого транспортного средства не имеет приоритета над перекрестной дорогой 73, блок 63 формирования траектории устанавливает начальное положение руления на основе опасности из множества опасностей 71 и 72, ближайшей к перекрестной дороге 73.
Кроме того, когда нет другого транспортного средства, которое въезжает на дорогу рассматриваемого транспортного средства с перекрестной дороги 73, блок 63 формирования траектории устанавливает начальное положение руления на основе опасности из множества опасностей 71 и 72, ближайшей к перекрестной дороге 73.
[0089]
С другой стороны, когда расстояние D между перекрестной дорогой 73 и множеством опасностей 71 и 72 находится в пределах предварительно определенного диапазона, дорога рассматриваемого транспортного средства имеет приоритет над перекрестной дорогой 73, и есть другое транспортное средство, которое въезжает на дорогу рассматриваемого транспортного средства с перекрестной дороги 73, блок 63 формирования траектории переключает начальное положение руления с положения, установленного на основе опасности из множества опасностей 71 и 72, которая является ближайшей к перекрестной дороге 73, в положение, установленное на основе перекрестной дороги 73.
[0090]
Когда перекрестная дорога 73 находится на левой стороне дороги рассматриваемого транспортного средства и ближе к рассматриваемому транспортному средству 70, чем множество опасностей 71 и 72, блок 63 формирования траектории переключает начальное положение руления для увеличения боковых зазоров от множества опасностей 71 и 72 перед проездом мимо множества опасностей 71 и 72 из положения, установленного на основе опасности 72, в положение p10, ближе к рассматриваемому транспортному средству 70, чем перекрестная дорога 73 (фиг. 11).
Когда перекрестная дорога 73 находится на правой стороне дороги рассматриваемого транспортного средства и ближе к рассматриваемому транспортному средству 70, чем множество опасностей 71 и 72, блок 63 формирования траектории переключает начальное положение руления для увеличения боковых зазоров от множество опасностей 71 и 72 перед проездом мимо множества опасностей 71 и 72 из положения, установленного на основе опасности 72, в положение p11, более удаленное от рассматриваемого транспортного средства 70, чем перекрестная дорога 73 (фиг. 12).
[0091]
Когда перекрестная дорога 73 находится на левой стороне дороги рассматриваемого транспортного средства и дальше от рассматриваемого транспортного средства 70, чем множество опасностей 71 и 72, блок 63 формирования траектории переключает начальное положение руления для возврата к исходному боковому положению после проезда мимо множества опасностей 71 и 72 из положения, установленного на основе опасности 71, в положение p12, более удаленное от рассматриваемого транспортного средства 70, чем перекрестная дорога 73 (фиг. 13).
Когда перекрестная дорога 73 находится на правой стороне дороги рассматриваемого транспортного средства и дальше от рассматриваемого транспортного средства 70, чем множество опасностей 71 и 72, блок 63 формирования траектории переключает начальное положение рулевого управления для возврата к исходному боковому положению после проезда мимо множества опасностей 71 и 72 из положения, установленного на основе опасности 71, в положение p13, которое ближе к рассматриваемому транспортному средству 70, чем перекрестная дорога 73 (фиг. 14).
[0092]
(Работа)
Далее будет дано описание работы устройства 1 помощи при вождении в третьем варианте осуществления. Ссылка будет сделана на фиг. 18.
На этапе S30 блок 60 получения информации о дороге рассматриваемого транспортного средства получает информацию о дороге рассматриваемого транспортного средства, включая информацию о правиле приоритета и/или правиле остановки для дороги рассматриваемого транспортного средства.
На этапе S31 блок 61 получения информации об опасностях обнаруживает множество опасностей 71 и 72, присутствующих на левой стороне дороги рассматриваемого транспортного средства и впереди пути рассматриваемого транспортного средства 70, чтобы определить положения опасностей 71 и 72. Когда опасности являются объектами уклонения, может быть получена информация о поперечной ширине объектов уклонения.
[0093]
На этапе S32 блок 64 получения информации о перекрестной дороге обнаруживает перекрестную дорогу 73, которая пересекается с дорогой рассматриваемого транспортного средства впереди пути рассматриваемого транспортного средства 70, и получает информацию о перекрестной дороге, включая информацию о положении перекрестной дороги 73 и правиле приоритета и/или правиле остановки для нее.
На этапе S33 блок 66 установки величины бокового перемещения определяет величину бокового перемещения m2 расширенной траектории 75 проезда, которая проходит мимо множества опасностей 71 и 72.
На этапе S34 блок 63 формирования траектории определяет, есть ли перекрестная дорога 73 ближе к рассматриваемому транспортному средству 70, чем множество опасностей 71 и 72.
[0094]
Когда есть перекрестная дорога 73 ближе к рассматриваемому транспортному средству 70, чем множество опасностей 71 и 72 (этап S34: Y), обработка переходит к этапу S37. Когда нет перекрестной дороги 73 ближе к рассматриваемому транспортному средству 70, чем множество опасностей 71 и 72 (этап S34: N), обработка переходит к этапу S35.
На этапе S35 блок 63 формирования траектории определяет, есть ли перекрестная дорога 73 дальше от рассматриваемого транспортного средства 70, чем множество опасностей 71 и 72.
Когда перекрестная дорога 73 находится дальше от рассматриваемого транспортного средства 70, чем множество опасностей 71 и 72 (этап S35: Y), обработка переходит к этапу S38. Когда нет перекрестной дороги 73 дальше от рассматриваемого транспортного средства 70, чем множество опасностей 71 и 72 (этап S35: N), обработка переходит к этапу S36.
[0095]
На этапе S36 блок 63 формирования траектории выполняет первый процесс формирования траектории движения. В первом процессе формирования траектории движения блок 63 формирования траектории устанавливает начальное положение руления на основе опасности из множества опасностей 71 и 72, ближайшей к рассматриваемому транспортному средству 70. Блок 63 формирования траектории формирует расширенную траекторию 75 проезда, которая запускает руление, которое сопровождает проезд мимо множества опасностей 71 и 72, в заданном начальном положении руления. Затем обработка переходит к этапу S39.
[0096]
Когда есть перекрестная дорога 73 ближе к рассматриваемому транспортному средству 70, чем множество опасностей 71 и 72 (этап S34: Y), блок 63 формирования траектории выполняет второй процесс формирования траектории движения на этапе S37.
Второй процесс формирования траектории движения будет описан со ссылкой на фиг. 19.
На этапе S40 блок 68 определения относительного позиционного отношения определяет, находится ли расстояние D между опасностью из множества опасностей 71 и 72, которая является ближайшей к перекрестной дороге 73, и перекрестной дорогой 73 в пределах предварительно определенного диапазона. Когда расстояние D находится в пределах предварительно определенного диапазона (этап S40: Y), обработка переходит к этапу S42. Когда расстояние D выходит за пределы предварительно определенного диапазона (этап S40: N), обработка переходит к этапу S41.
[0097]
На этапе S41 блок 63 формирования траектории устанавливает начальное положение руления на основе опасности из множества опасностей 71 и 72, которая являются ближайшей к перекрестной дороге 73. Затем обработка переходит к этапу S46.
На этапе S42 блок 69 определения приоритета определяет, имеет ли дорога рассматриваемого транспортного средства приоритет над перекрестной дорогой, на основании правил приоритета и/или правил остановки для дороги рассматриваемого транспортного средства и перекрестной дороги. Когда дорога рассматриваемого транспортного средства имеет приоритет над перекрестной дорогой (этап S42: Y), обработка переходит к этапу S43. Когда дорога рассматриваемого транспортного средства не имеет приоритета над перекрестной дорогой (этап S42: N), обработка переходит к этапу S45.
[0098]
На этапе S43 блок 63 формирования траектории определяет, присутствует ли перекрестная дорога 73 на левой стороне дороги рассматриваемого транспортного средства. Когда перекрестная дорога 73 присутствует на левой стороне дороги рассматриваемого транспортного средства (этап S43: Y), обработка переходит к этапу S44. Когда перекрестная дорога 73 отсутствует на левой стороне дороги рассматриваемого транспортного средства (этап S43: N), обработка переходит к этапу S45.
На этапе S44 блок 63 формирования траектории устанавливает начальное положение руления для увеличения боковых зазоров от множества опасностей 71 и 72 перед проездом мимо множества опасностей 71 и 72 в позицию ближе к рассматриваемому транспортному средству 70, чем перекрестная дорога 73. Затем обработка переходит к этапу S46.
[0099]
На этапе S45 блок 63 формирования траектории устанавливает начальное положение руления для увеличения боковых зазоров от множества опасностей 71 и 72 перед проездом мимо множества опасностей 71 и 72 в положение дальше от рассматриваемого транспортного средства 70, чем перекрестная дорога 73. Затем обработка переходит к этапу S46.
На этапе S46 блок 63 формирования траектории формирует расширенную траекторию 75 проезда, начинающуюся с руления, которое сопровождает проезд мимо множества опасностей 71 и 72 в заданном начальном положении руления, и проходящую мимо множества опасностей 71 и 72 в боковом положении, перемещенном на величину бокового перемещения m2 или более, определенную на этапе S33. Затем процесс формирования второй траектории движения заканчивается.
[0100]
Ссылка будет сделана на фиг. 18. Когда перекрестная дорога 73 находится дальше от рассматриваемого транспортного средства 70, чем множество опасностей 71 и 72 (этап S35: Y), блок 63 формирования траектории выполняет третий процесс формирования траектории движения на этапе S38.
Третий процесс формирования траектории движения будет описан со ссылкой на фиг. 20.
На этапе S50 блок 68 определения относительного позиционного отношения определяет, находится ли расстояние D между опасностью из множества опасностей 71 и 72, которая является ближайшей к перекрестной дороге 73, и перекрестной дорогой 73, в пределах предварительно определенного диапазона. Когда расстояние D находится в пределах предварительно определенного диапазона (этап S50: Y), обработка переходит к этапу S52. Когда расстояние D выходит за пределы предварительно определенного диапазона (этап S50: N), обработка переходит к этапу S51.
[0101]
На этапе S51 блок 63 формирования траектории устанавливает начальное положение руления на основе опасности из множества опасностей 71 и 72, которая является ближайшей к перекрестной дороге 73. Затем обработка переходит к этапу S56.
На этапе S52 блок 69 определения приоритета определяет, имеет ли дорога рассматриваемого транспортного средства приоритет над перекрестной дорогой на основе правил приоритета и/или правил остановки для дороги рассматриваемого транспортного средства и перекрестной дороги. Когда дорога рассматриваемого транспортного средства имеет приоритет над перекрестной дорогой (этап S52: Y), обработка переходит к этапу S53. Когда дорога рассматриваемого транспортного средства не имеет приоритета над перекрестной дорогой (этап S52: N), обработка переходит к этапу S55.
[0102]
На этапе S53 блок 63 формирования траектории определяет, присутствует ли перекрестная дорога 73 на левой стороне дороги рассматриваемого транспортного средства. Когда перекрестная дорога 73 присутствует на левой стороне дороги рассматриваемого транспортного средства (этап S53: Y), обработка переходит к этапу S54. Когда перекрестная дорога 73 отсутствует на левой стороне дороги рассматриваемого транспортного средства (этап S53: N), обработка переходит к этапу S55.
На этапе S54 блок 63 формирования траектории устанавливает начальное положение руления для возврата в исходное боковое положение после проезда мимо множества опасностей 71 и 72 в положение дальше от рассматриваемого транспортного средства 70, чем перекрестная дорога 73. Затем обработка переходит к этапу S56.
[0103]
На этапе S55 блок 63 формирования траектории устанавливает начальное положение руления для возврата в исходное боковое положение после проезда мимо множества опасностей 71 и 72 в положение, более близкое к рассматриваемому транспортному средству 70, чем перекрестная дорога 73. Затем обработка переходит к этапу S56.
Обработка на этапе S56 такая же, как обработка на этапе S46 на фиг. 19. На этом процесс построения третьей траектории движения заканчивается.
Ссылка будет сделана на фиг. 18. На этапе S39 контроллер 50 управления движением приводит в действие группу 51 исполнительных механизмов управления транспортным средством, так что рассматриваемое транспортное средство 70 движется по расширенной траектории 75 проезда, формируемой блоком 63 формирования траектории, тем самым заставляя рассматриваемое транспортное средство 70 двигаться автоматически.
[0104]
(Варианты)
Ссылка будет сделана на фиг. 21. Блок 61 получения информации об опасностях может обнаруживать множество опасностей 72 и 80, соответственно, присутствующих в одних и тех же передних и задних положениях впереди пути рассматриваемого транспортного средства 70. Например, опасность 80 представляет собой двухколесное транспортное средство, которое проезжает мимо правой боковой стороны припаркованного транспортного средства 72 и обгоняет припаркованное транспортное средство 72.
Даже в этом случае блок 66 установки величины бокового перемещения вычисляет величину бокового перемещения m4 из текущего бокового положения p0 рассматриваемого транспортного средства, которая предназначена для проезда мимо двухколесного транспортного средства 80 с зазором c4 от двухколесного транспортного средства 80.
[0105]
Когда расстояние между боковым положением p4 от двухколесного транспортного средства 80 с зазором c4 и границей дороги на левой стороне дороги рассматриваемого транспортного средства определяется как d4, величина бокового перемещения m4 может быть определена как m4 = (d4 - d0).
Блок 66 установки величины бокового перемещения может устанавливать в качестве величины бокового перемещения расширенной траектории 75 проезда максимальную величину бокового перемещения среди величин бокового перемещения, определенных с учетом опасностей 71 и 72, отличных от двухколесного транспортного средства 80, и величины бокового перемещения m4.
В этом случае, например, при движении по расширенной траектории 75 проезда, обгоняющей двухколесное транспортное средство 80, рассматриваемое транспортное средство 70 может чрезмерно приближаться к правой стороне дороги рассматриваемого транспортного средства. Соответственно, блок 63 формирования траектории может запрещать формирование расширенной траектории 75 проезда, когда рассматриваемое транспортное средство 70 чрезмерно приближается к правой стороне дороги рассматриваемого транспортного средства (например, когда правый крайний участок рассматриваемого транспортного средства 70 выходит за правый конец дороги рассматриваемого транспортного средства).
[0106]
(Эффекты третьего варианта осуществления)
(1) Блок 63 формирования траектории переключает начальное положение руления, которое сопровождает, когда рассматриваемое транспортное средство проезжает мимо множества опасностей, в соответствии с тем, находится ли перекрестная дорога, которая пересекается с дорогой рассматриваемого транспортного средства впереди пути рассматриваемого транспортного средства, на левой стороне или на правой стороне дороги рассматриваемого транспортного средства.
Это позволяет рассматриваемому транспортному средству проезжать перекресток с зазором от перекрестной дороги независимо от того, находится ли перекрестная дорога на левой или на правой стороне дороги рассматриваемого транспортного средства.
[0107]
(2) Блок 63 формирования траектории определяет, следует ли переключать начальное положение, на основе позиционных соотношений между перекрестной дорогой и множеством опасностей.
Это может предотвратить непрерывное движение на участке от перекрестка до множества опасностей без возврата к левой стороне дороги, когда расстояние между перекрестной дорогой, которая находится на левой стороне дороги рассматриваемого транспортного средства, и множеством опасностей является большим. Кроме того, когда перекресток дороги, который находится на правой стороне дороги рассматриваемого транспортного средства, и множество опасностей близки друг к другу, может быть предотвращено возникновение внезапной операции руления после проезда перекрестной дороги.
[0108]
(3) Блок 63 формирования траектории переключает начальное положение, когда расстояние между любой опасностью из множества опасностей, ближайшей к перекрестной дороге, и перекрестной дорогой находится в пределах предварительно определенного диапазона.
Это может предотвратить непрерывное движение на участке от перекрестка до множества опасностей без возврата к левой стороне дороги, когда расстояние между перекрестной дорогой, которая находится на левой стороне дороги рассматриваемого транспортного средства, и множеством опасностей является большим. Кроме того, когда перекрестная дорога, которая находится на правой стороне дороги рассматриваемого транспортного средства, и множество опасностей близки друг к другу, может быть предотвращено возникновение внезапной операции руления после проезда мимо перекрестной дороги.
(4) Предварительно определенный диапазон устанавливается на основе запретной для парковки зоны вблизи перекрестка, определенной законом. Таким образом, установка расстояния, определенного законом, в качестве нижнего предела предварительно определенного диапазона, может предотвратить возникновение внезапной операции руления после проезда мимо перекрестной дороги, когда перекрестная дорога, которая находится на правой стороне дороги рассматриваемого транспортного средства, и множество опасностей близки друг к другу.
[0109]
(5) Руление (рулевое управление), которое сопровождает, когда рассматриваемое транспортное средство проезжает мимо множество опасностей, является рулением для увеличения боковых зазоров от множества опасностей перед проездом мимо множества опасностей. Когда перекрестная дорога находится ближе к рассматриваемому транспортному средству, чем множество опасностей, и находится на левой стороне, блок 63 формирования траектории переключает начальное положение в положение, более близкое к рассматриваемому транспортному средству, чем перекрестная дорога.
Таким образом, начало руления для увеличения боковых зазоров от множества опасностей на левой стороне дороги рассматриваемого транспортного средства перед проездом мимо перекрестной дороги на левой стороне дороги рассматриваемого транспортного средства позволяет проехать мимо с достаточным зазором от перекрестной дороги.
[0110]
(6) Когда руление, которое сопровождает, когда рассматриваемое транспортное средство проезжает мимо множества опасностей, является рулением для увеличения боковых зазоров от множества опасностей перед проездом мимо множества опасностей. Когда перекрестная дорога находится ближе к рассматриваемому транспортному средству, чем множество опасностей, и находится на правой стороне, блок 63 формирования траектории переключает начальное положение в положение, более удаленное от рассматриваемого транспортного средства, чем перекрестная дорога.
Таким образом, начало руления для увеличения боковых зазоров от множества опасностей на левой стороне дороги рассматриваемого транспортного средства после проезда мимо перекрестной дороги на правой стороне дороги рассматриваемого транспортного средства обеспечивает проезд мимо с достаточным зазором от перекрестной дороги.
[0111]
(7) Когда руление, которое сопровождает, когда рассматриваемое транспортное средство проезжает мимо множества опасностей, является рулением для возврата в исходное боковое положение после проезда мимо множества опасностей. Когда перекрестная дорога находится дальше от рассматриваемого транспортного средства, чем множество опасностей, и находится на левой стороне, блок 63 формирования траектории переключает начальное положение в положение, более удаленное от рассматриваемого транспортного средства, чем перекрестная дорога.
Таким образом, включение рулевого управления для возврата в исходное боковое положение после проезда мимо перекрестной дороги на левой стороне дороги рассматриваемого транспортного средства позволяет проехать мимо с достаточным зазором от перекрестной дороги.
[0112]
(8) Руление, которое сопровождает, когда рассматриваемое транспортное средство проезжает мимо множества опасностей, представляет собой руление для возврата в исходное боковое положение после проезда мимо множества опасностей. Когда перекрестная дорога находится дальше от рассматриваемого транспортного средства, чем множество опасностей, и находится на правой стороне, блок 63 формирования траектории переключает начальное положение в положение, более близкое к рассматриваемому транспортному средству, чем перекрестная дорога.
Таким образом, начало руления для возврата в исходное боковое положение перед проездом мимо перекрестной дороги на правой стороне дороги рассматриваемого транспортного средства позволяет проехать мимо с достаточным зазором от перекрестной дороги.
[0113]
(9) Когда дорога рассматриваемого транспортного средства имеет приоритет над перекрестной дорогой, блок 63 формирования траектории переключает начальное положение руления. Это может предотвратить ненужное переключение начального положения руления.
(10) Когда есть транспортное средство, которое въезжает на дорогу рассматриваемого транспортного средства с перекрестной дороги, блок 63 формирования траектории переключает начальное положение. Это может предотвратить ненужное переключение начального положения руления.
[0114]
(11) Когда перекрестная дорога находится на левой стороне дороги рассматриваемого транспортного средства, блок 66 установки величины бокового перемещения определяет величину бокового перемещения рассматриваемого транспортного средства для проезда мимо перекрестной дороги с зазором от перекрестной дороги. Блок 63 формирования траектории формирует в качестве расширенной траектории проезда траекторию движения, которая проходит мимо множества опасностей и перекрестной дороги, посредством перемещения на максимальную величину бокового перемещения среди величин бокового перемещения, соответственно определенных в отношении множества опасностей, и величины бокового перемещения, определенной относительно перекрестной дороги.
Это позволяет определять величину бокового перемещения с учетом зазора, который должен быть обеспечен от перекрестной дороги на левой стороне дороги рассматриваемого транспортного средства, а также от множества опасностей.
[0115]
Все примеры и условные формулировки, представленные в данном документе, предназначены для педагогических целей, чтобы помочь читателю понять изобретение и концепции, внесенные изобретателем в развитие данной области техники, и не должны рассматриваться как ограничения таких конкретно перечисленных примеров и условий, или связана ли организация таких примеров в описании с демонстрацией превосходства и неполноценности изобретения. Хотя один или несколько вариантов осуществления настоящего изобретения были описаны подробно, следует понимать, что в него могут быть внесены различные изменения, замены и модификации, не выходящие за рамки сущности и объема изобретения.
СПИСОК ССЫЛОЧНЫХ ОБОЗНАЧЕНИЙ
[0116]
1: Устройство помощи при вождении
2: Устройство формирования траектории движения
10: Группа датчиков окружающей среды
11: Дальномер
12: Камера
20: Навигационная система
21: Контроллер навигации
22: Устройство позиционирования
23: База данных карт
24: Блок отображения
25: Операционный блок
26: Блок вывода аудио
27: Блок связи
30: Группа датчиков транспортного средства
31: Датчик скорости транспортного средства
32: Датчик ускорения
33: Гироскопический датчик
34: Датчик угла поворота рулевого колеса
35: Датчик акселератора
36: Датчик тормоза
40: Контроллер
41: Процессор
42: Устройство хранения
50: Контроллер управления движением
51: Группа исполнительных механизмов управления транспортным средством
52: Исполнительный механизм руления
53: Исполнительный механизм положения акселератора
54: Исполнительный механизм управления тормозом
60: Блок получения информации о дороге рассматриваемого транспортного средства
61: Блок получения информации об опасностях
62: Блок получения сигналов транспортного средства
63: Блок формирования траектории
64: Блок получения информации о перекрестной дороге
65: Блок получения информации об объекте уклонения
66: Блок установки величины бокового перемещения
67: Блок установки положения руления
68: Блок определения относительного позиционного отношения
69: Блок определения приоритета
70: Рассматриваемое транспортное средство
71: Пешеход
72: Припаркованное транспортное средство
73: Перекрестная дорога
74-76, 78: Траектория движения
80: Двухколесное транспортное средство
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОМОЩИ ПРИ ВОЖДЕНИИ И УСТРОЙСТВО ПОМОЩИ ПРИ ВОЖДЕНИИ | 2018 |
|
RU2763452C1 |
| СПОСОБ ПОМОЩИ ПРИ ВОЖДЕНИИ И УСТРОЙСТВО ПОМОЩИ ПРИ ВОЖДЕНИИ | 2017 |
|
RU2742400C1 |
| СПОСОБ ПОМОЩИ ПРИ ВОЖДЕНИИ И УСТРОЙСТВО ПОМОЩИ ПРИ ВОЖДЕНИИ | 2019 |
|
RU2768417C1 |
| СПОСОБ ПОМОЩИ ПРИ ВОЖДЕНИИ И УСТРОЙСТВО ПОМОЩИ ПРИ ВОЖДЕНИИ | 2017 |
|
RU2722777C1 |
| СПОСОБ ПОМОЩИ ПРИ ВОЖДЕНИИ И УСТРОЙСТВО ПОМОЩИ ПРИ ВОЖДЕНИИ | 2017 |
|
RU2754705C1 |
| СПОСОБ ПОМОЩИ ПРИ ВОЖДЕНИИ И УСТРОЙСТВО ПОМОЩИ ПРИ ВОЖДЕНИИ | 2019 |
|
RU2774521C1 |
| СПОСОБ И УСТРОЙСТВО ПОМОЩИ ПРИ ВОЖДЕНИИ | 2016 |
|
RU2719080C2 |
| СПОСОБ И УСТРОЙСТВО ПОМОЩИ ПРИ ВОЖДЕНИИ | 2016 |
|
RU2719495C2 |
| СПОСОБ ПОМОЩИ ПРИ ВОЖДЕНИИ И УСТРОЙСТВО ПОМОЩИ ПРИ ВОЖДЕНИИ | 2016 |
|
RU2724938C1 |
| СПОСОБ ПОМОЩИ ПРИ ВОЖДЕНИИ И СИСТЕМА ПОМОЩИ ПРИ ВОЖДЕНИИ | 2019 |
|
RU2778327C1 |
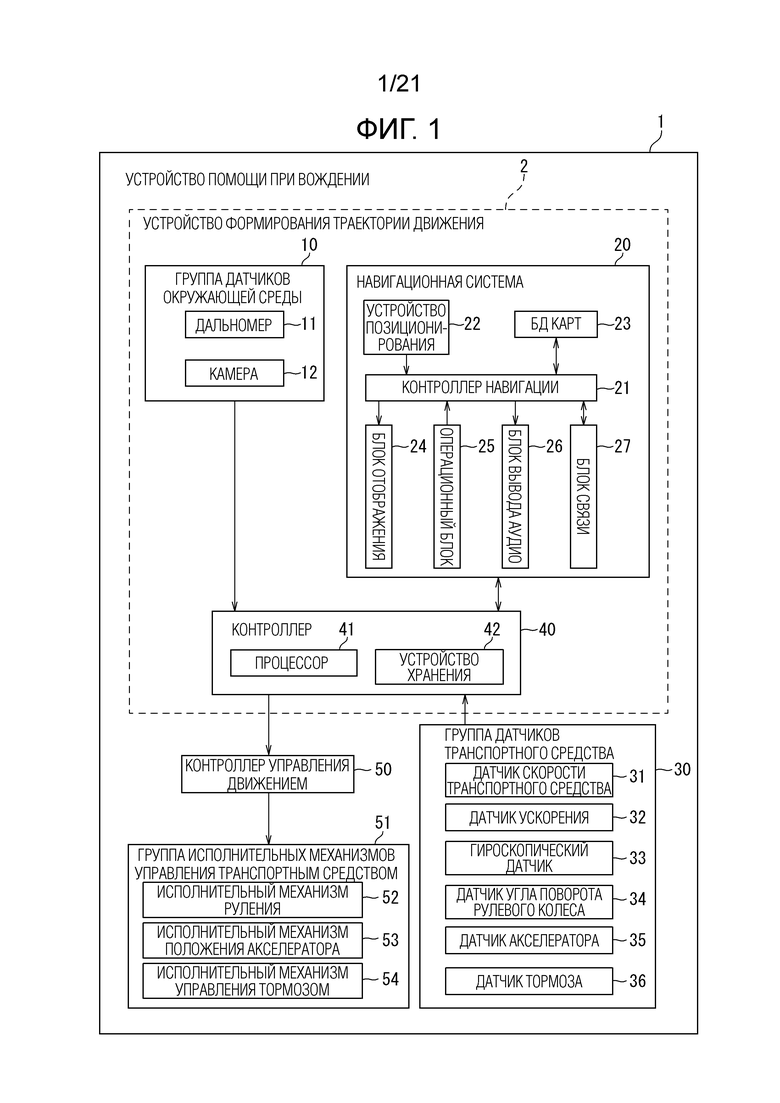
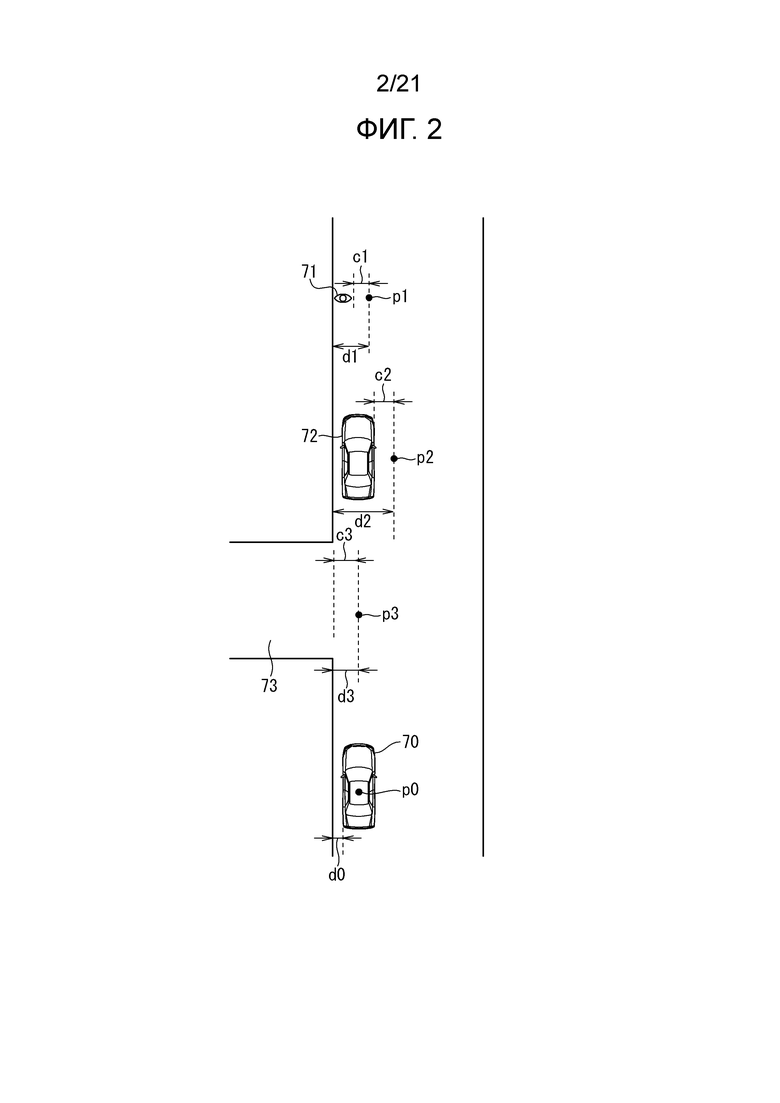
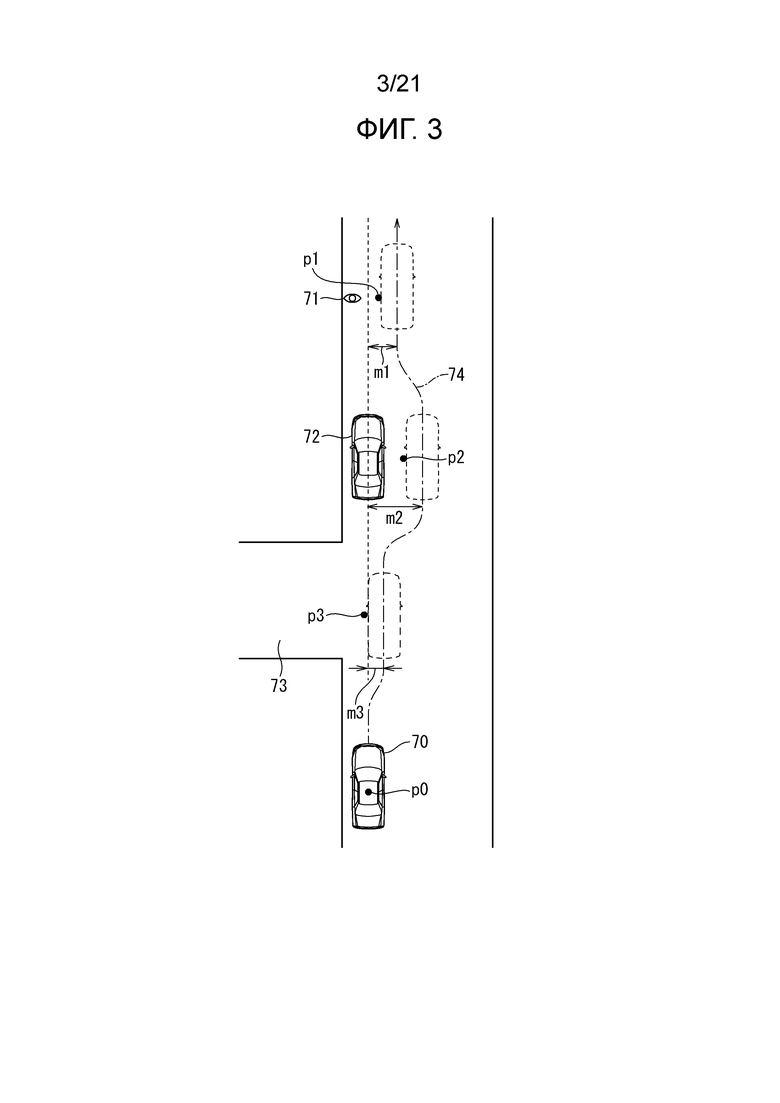
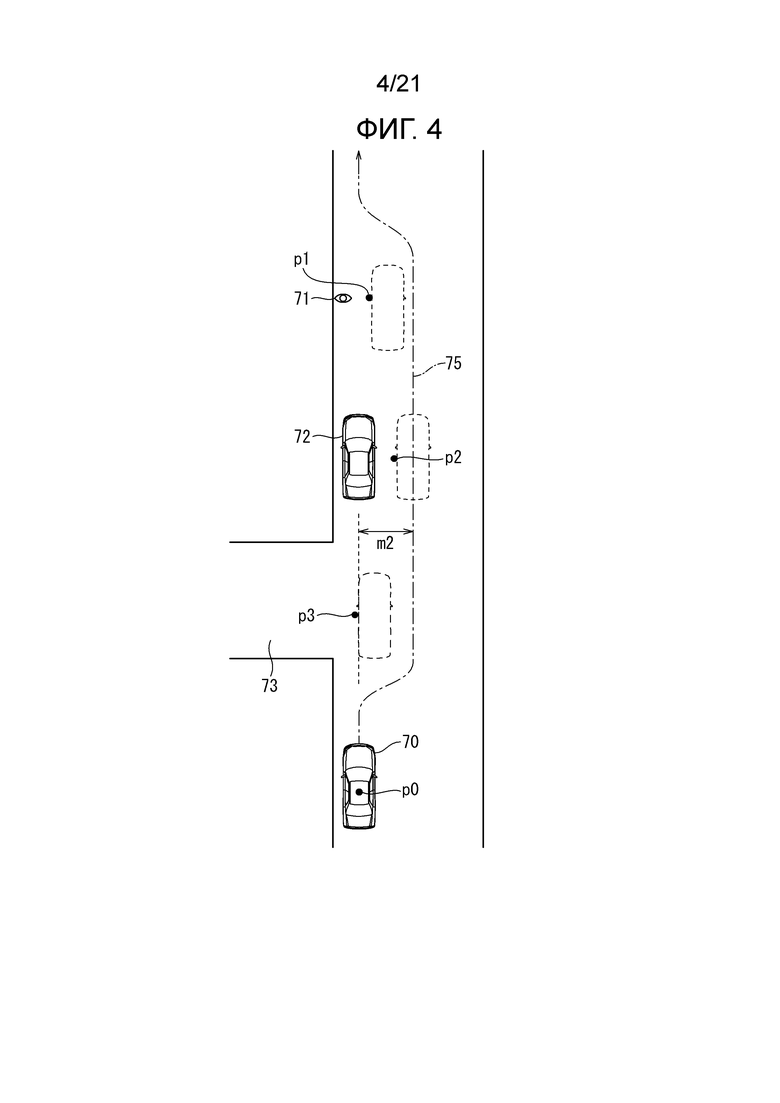
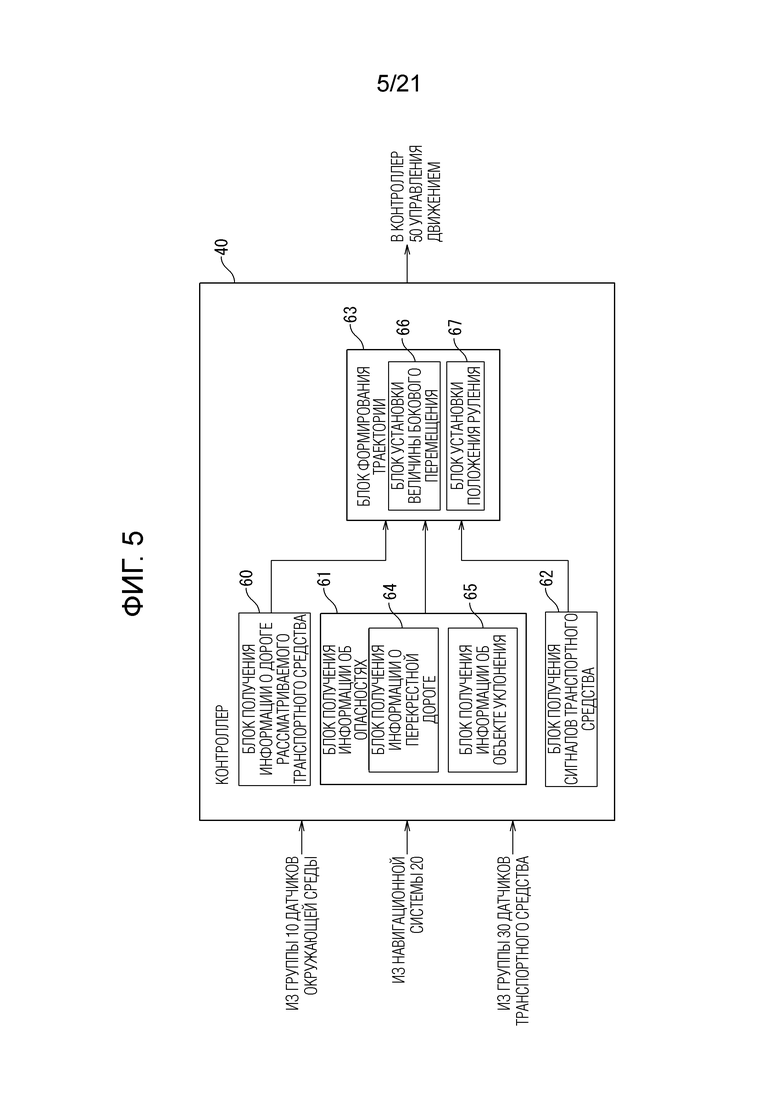
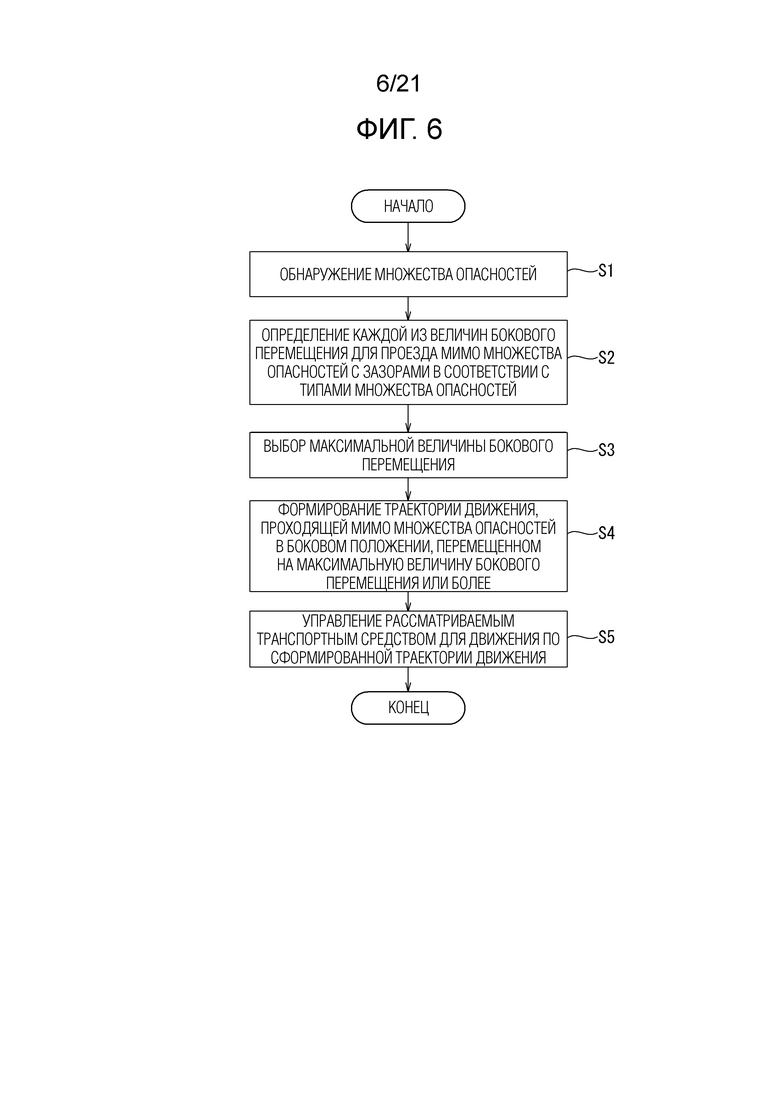
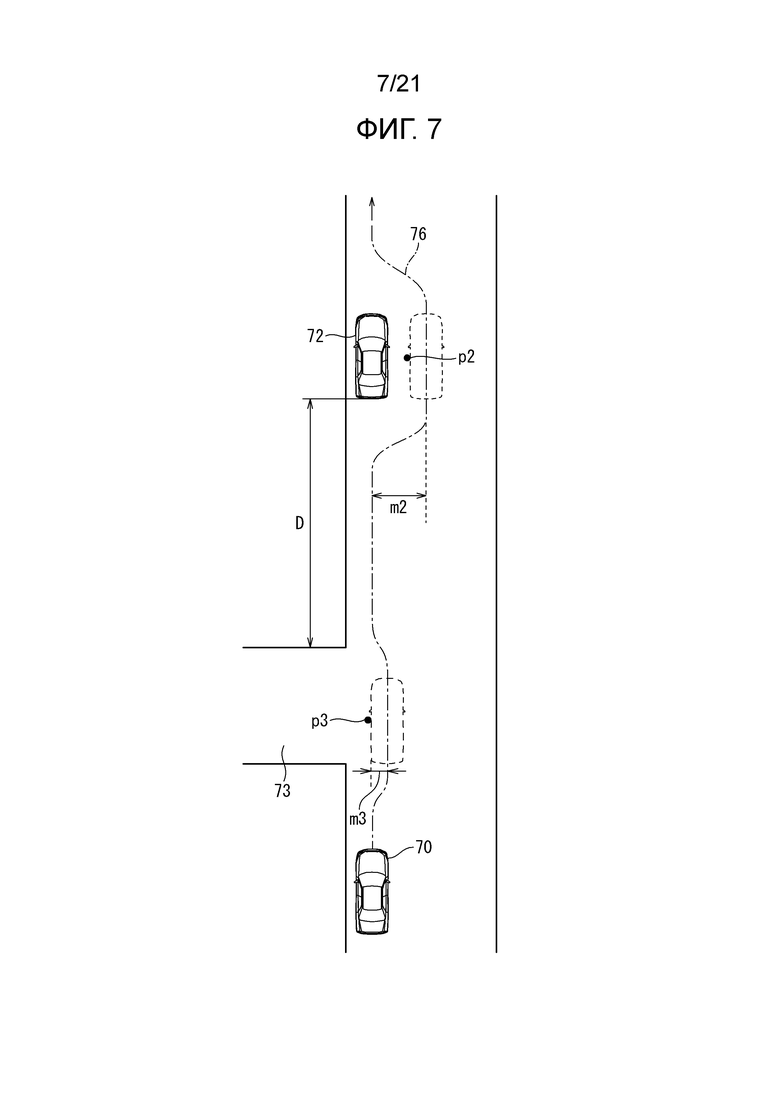
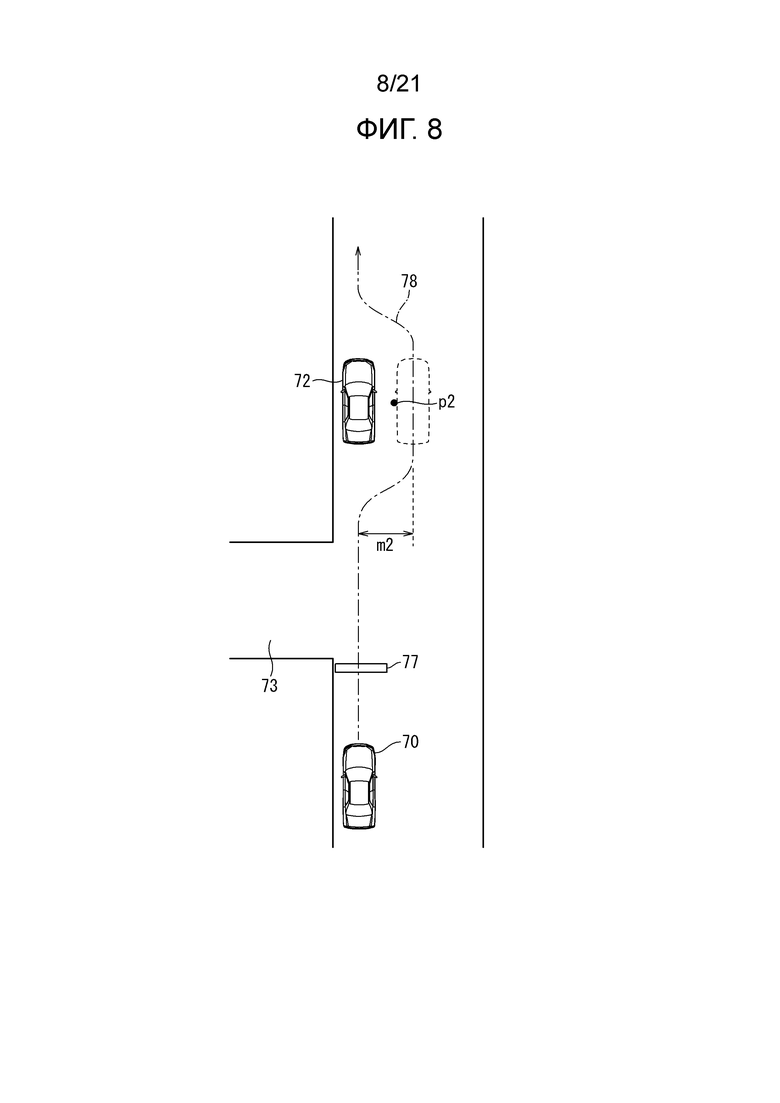
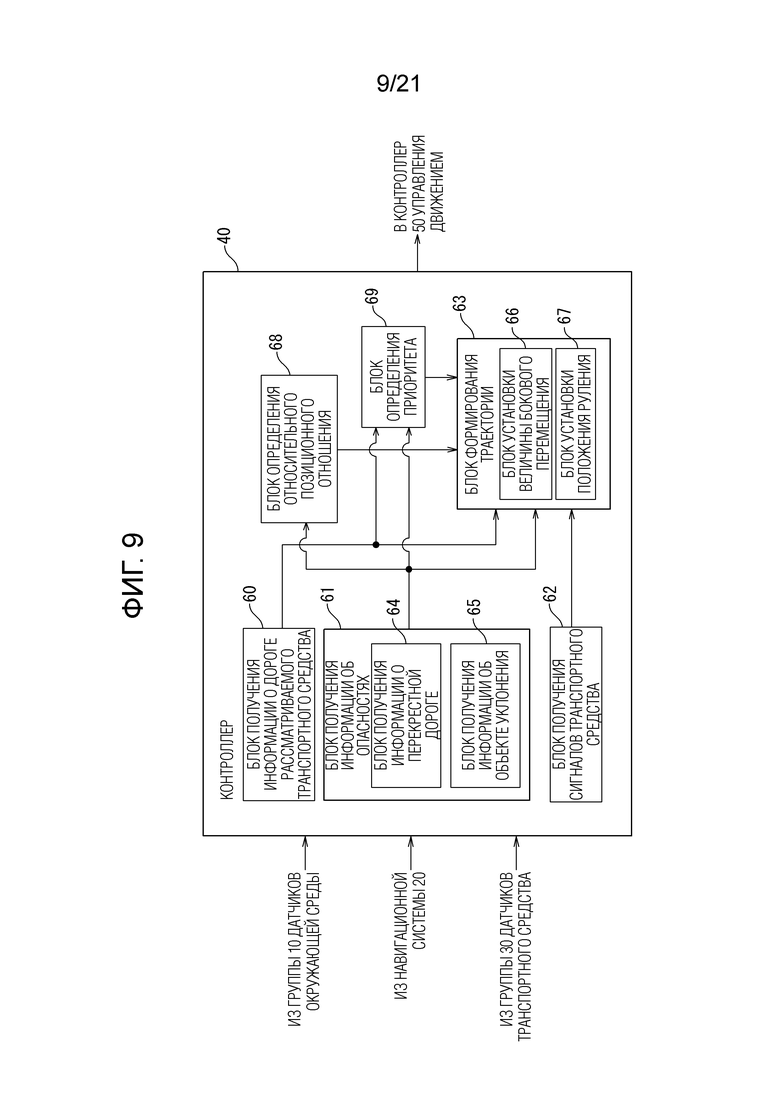
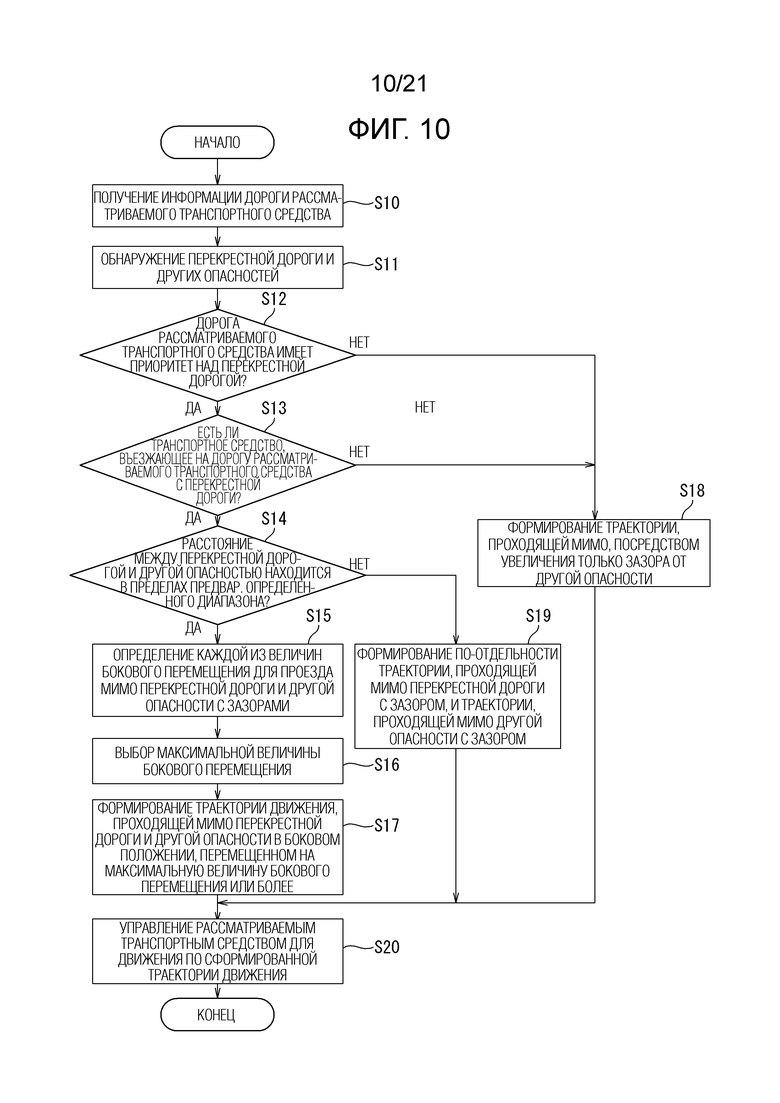
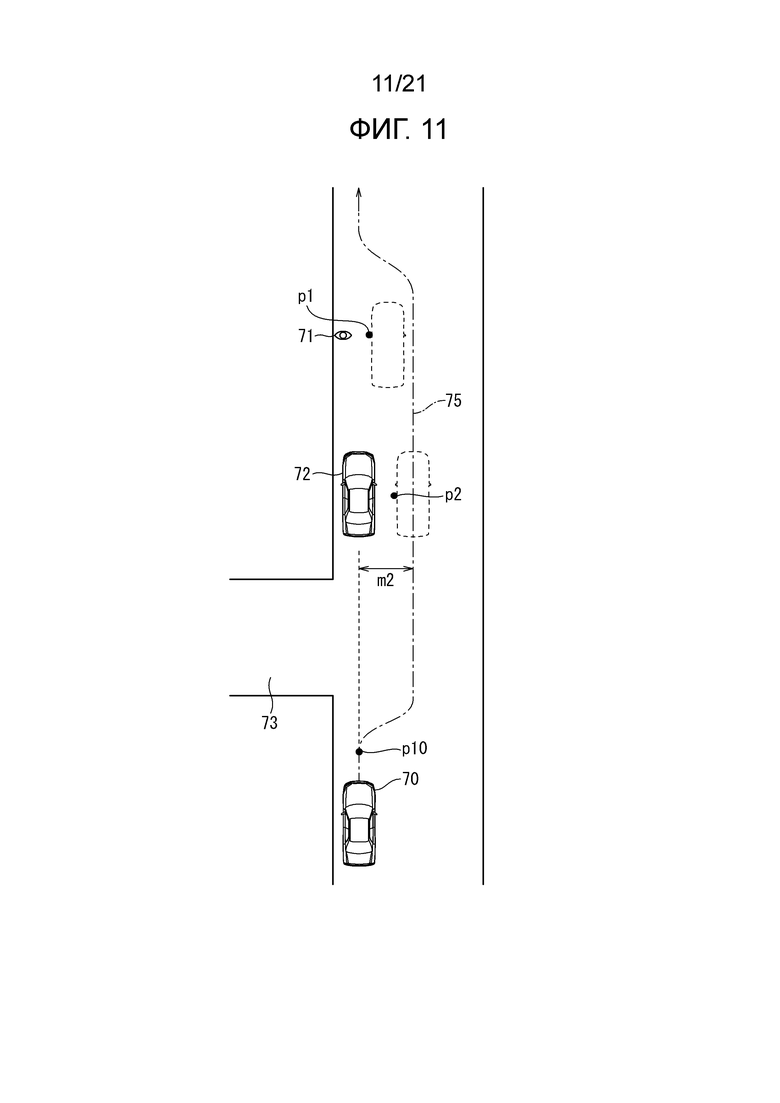
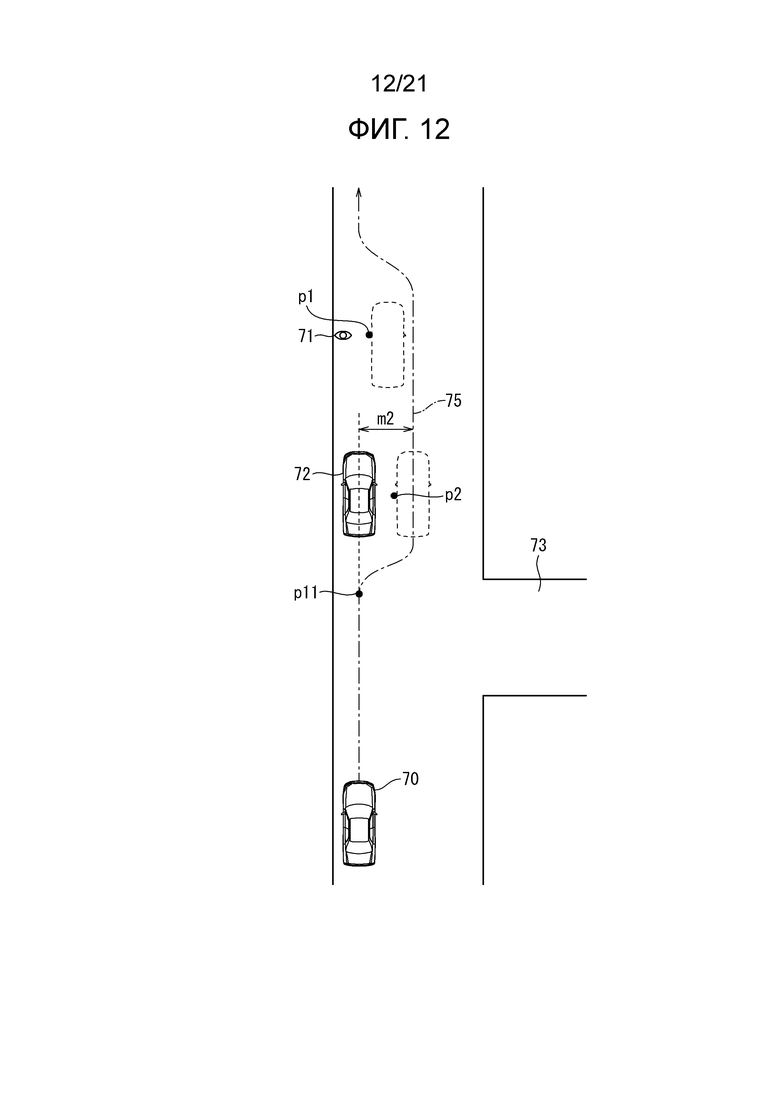
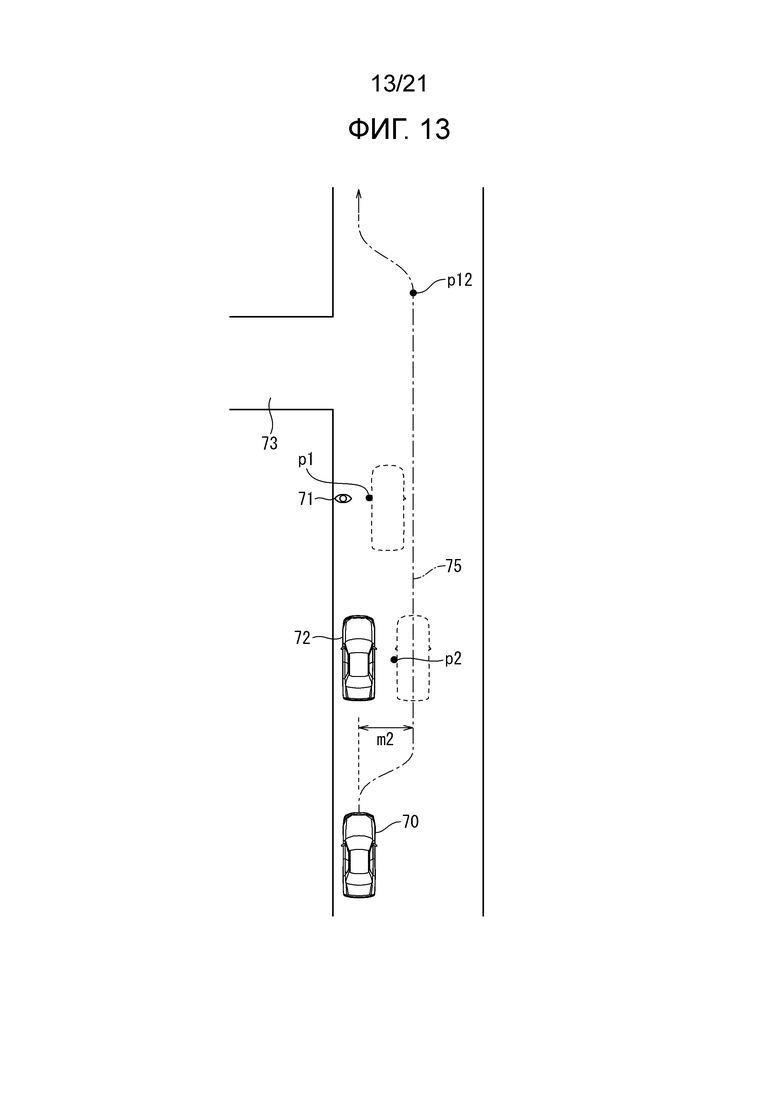
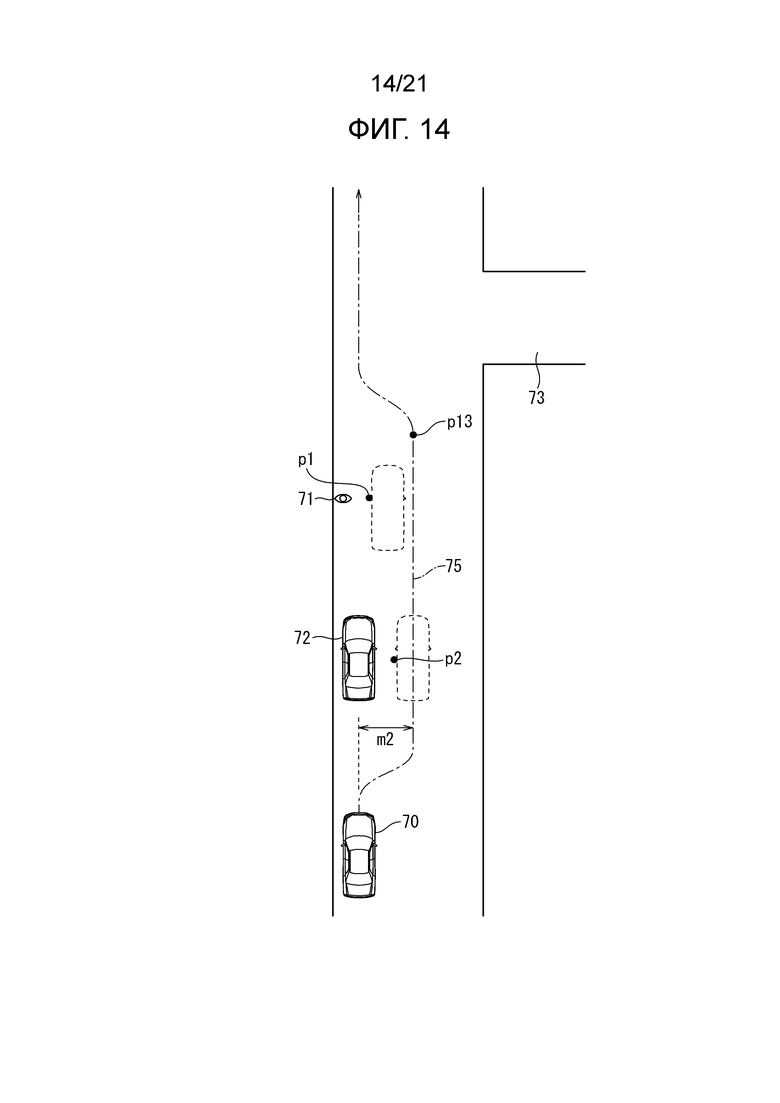
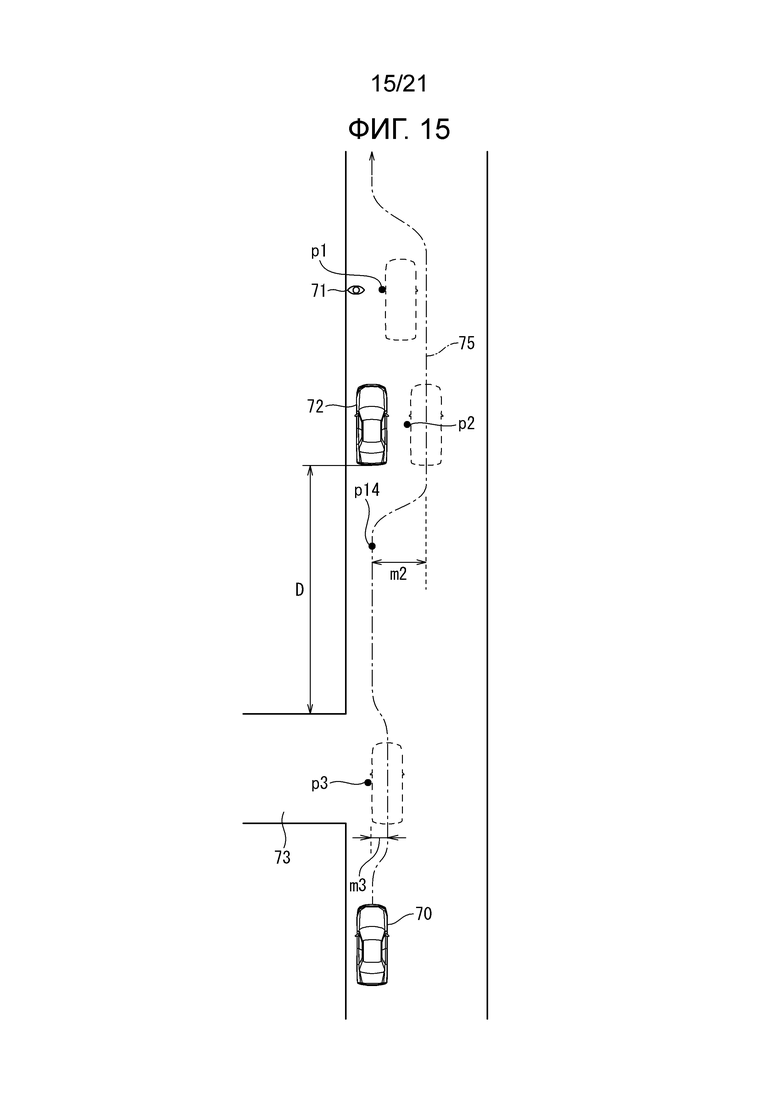
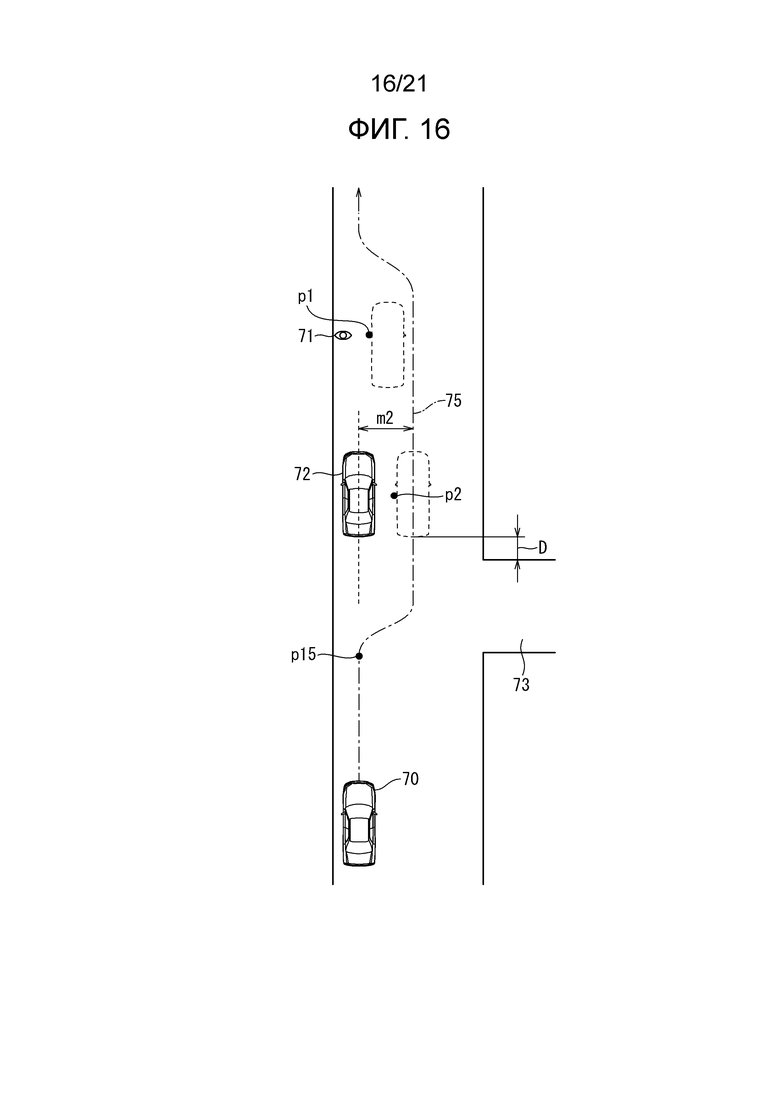
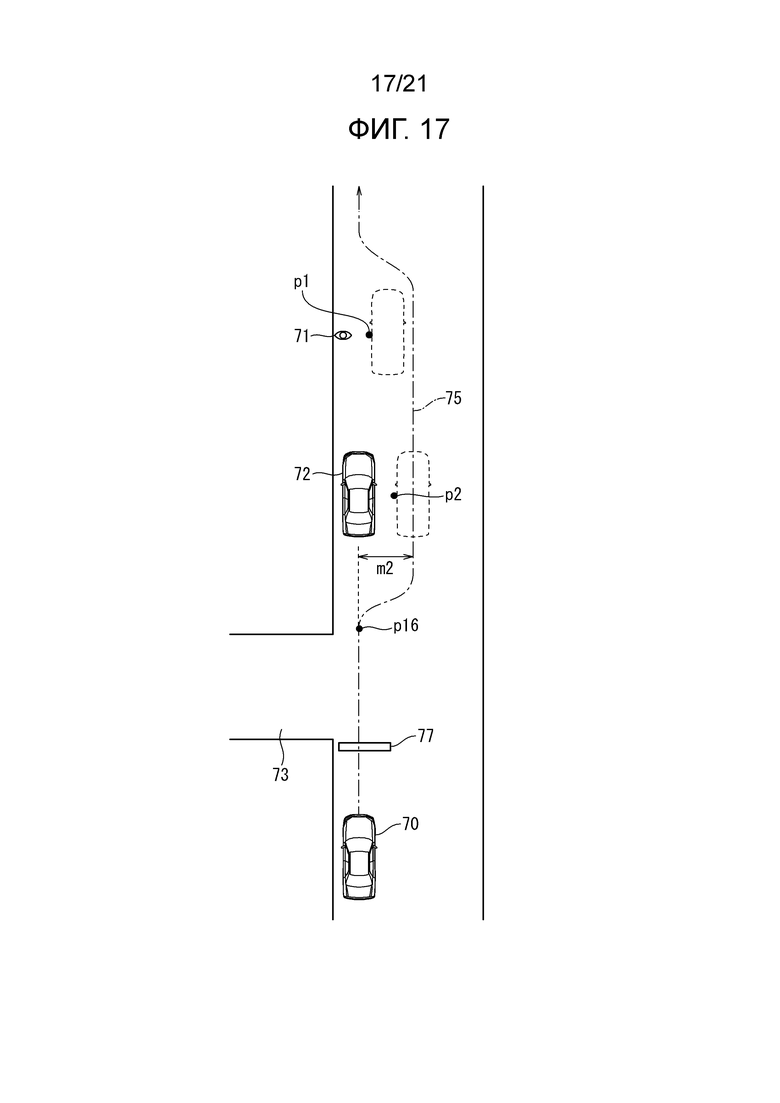
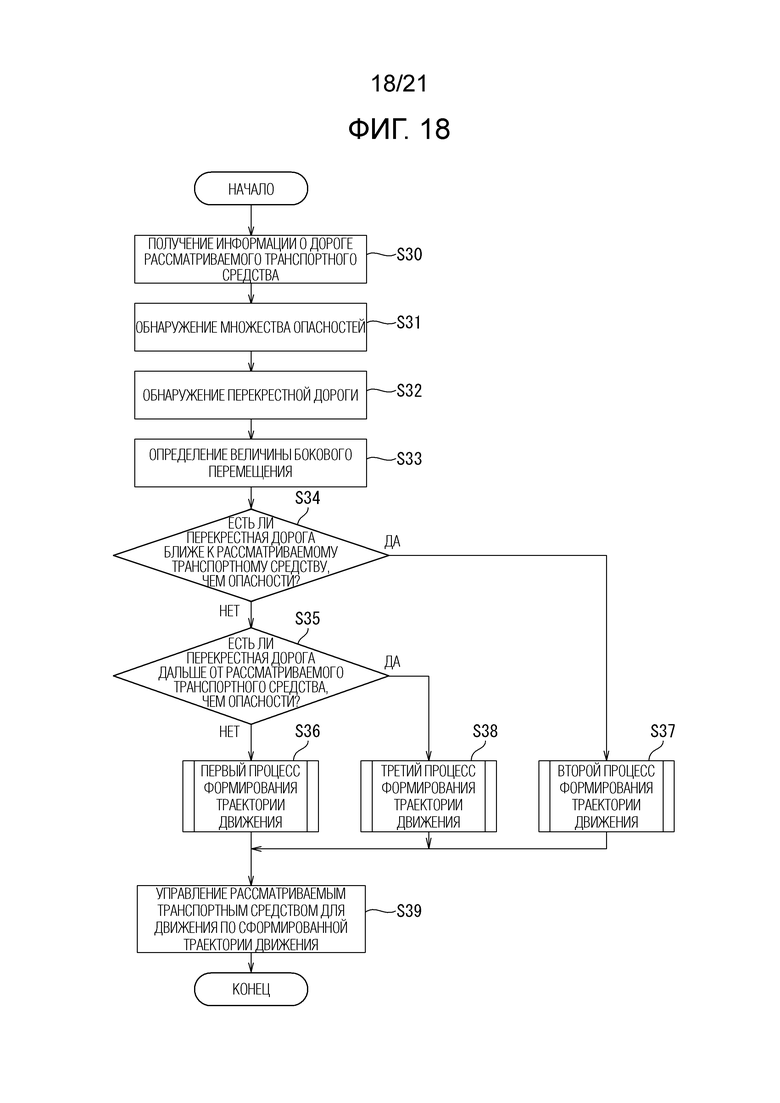
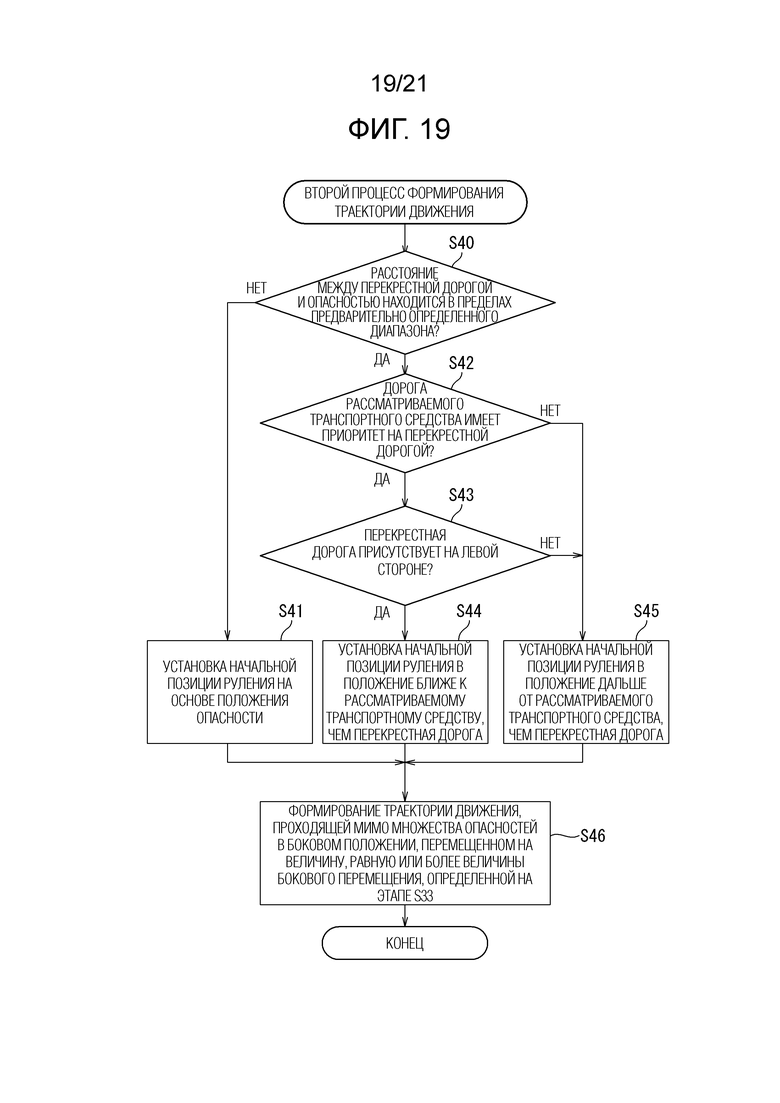
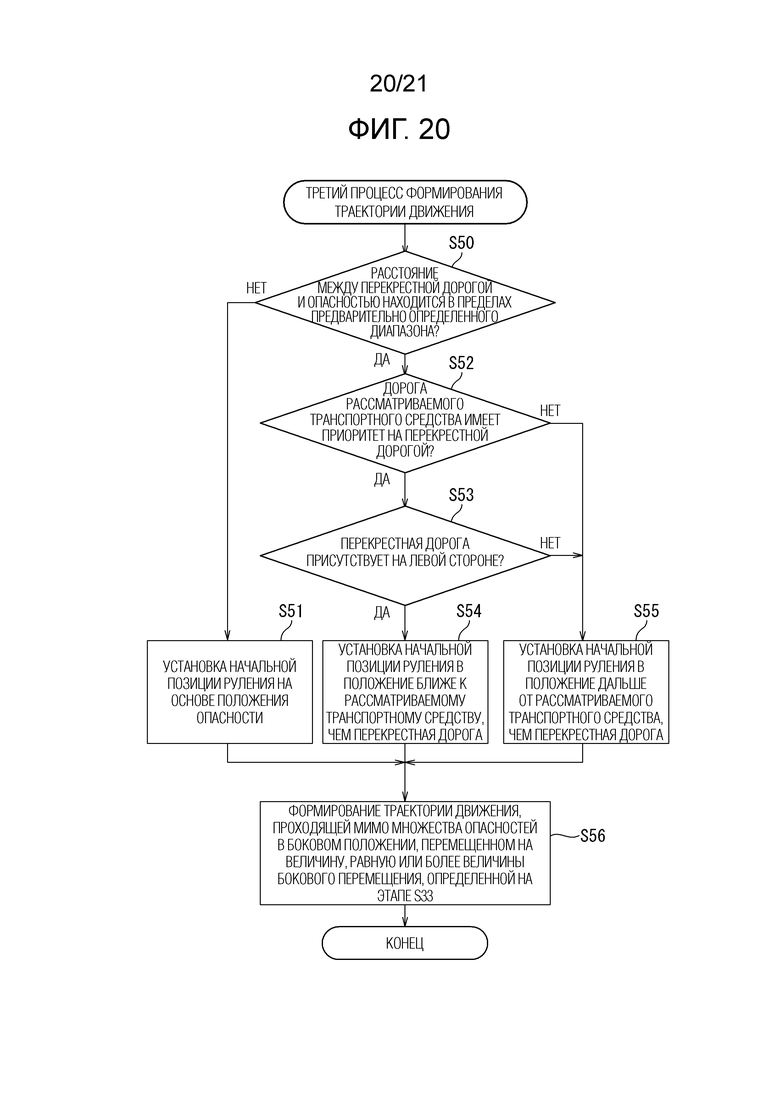
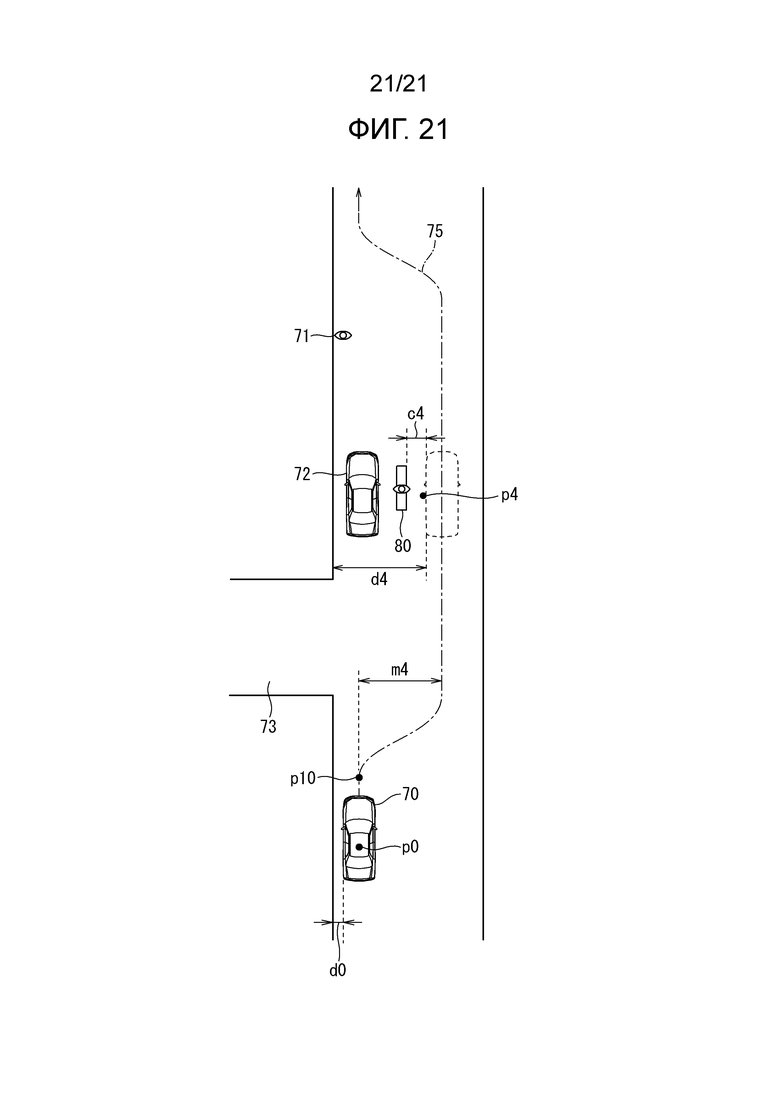
Группа изобретений относится к способу и устройству помощи при вождении. Устройство помощи при вождении содержит датчик и контроллер. Датчик выполнен с возможностью обнаруживать множество опасностей, которые соответственно присутствуют на одной стороне из левой стороны и правой стороны дороги рассматриваемого транспортного средства и которые находятся в различных передних и задних положениях впереди пути рассматриваемого транспортного средства. Контроллер выполнен с возможностью определять, в соответствии с типами множества опасностей, каждую из величин бокового перемещения рассматриваемого транспортного средства для избегания и проезда мимо множества опасностей с зазорами от множества опасностей, формировать траекторию движения, проходящую мимо множества опасностей в боковом положении, перемещенном на величину, равную или превышающую максимальную величину бокового перемещения среди упомянутых определенных величин бокового перемещения, и осуществлять руление автоматически таким образом, чтобы рассматриваемое транспортное средство двигалось по траектории движения. Достигается возможность плавного проезда транспортного средства мимо множества опасностей с зазорами от опасностей. 2 н. и 15 з.п. ф-лы, 21 ил.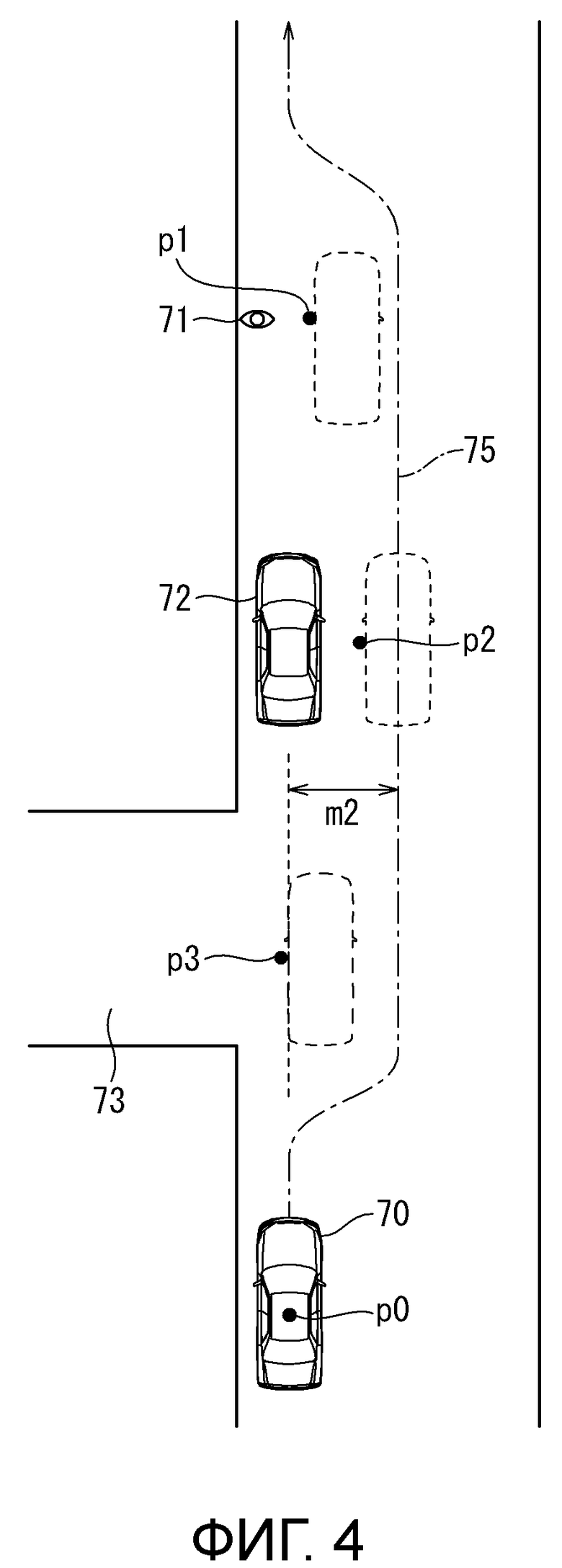
1. Способ помощи при вождении, включающий в себя предписывание контроллеру:
обнаруживать множество опасностей, которые соответственно присутствуют на одной стороне из левой стороны и правой стороны дороги рассматриваемого транспортного средства, которая является дорогой, по которой движется рассматриваемое транспортное средство, причем упомянутая одна сторона находится близко к рассматриваемому транспортному средству, и которые находятся на различных передних и задних положениях впереди пути рассматриваемого транспортного средства;
определять, в соответствии с типами множества опасностей, каждую из величин бокового перемещения рассматриваемого транспортного средства для избегания и проезда мимо множества опасностей с зазорами от множества опасностей;
формировать траекторию движения, избегающую и проходящую мимо множества опасностей в боковом положении, перемещенном на величину, равную или превышающую максимальную величину бокового перемещения среди упомянутых определенных величин бокового перемещения; и
осуществлять руление автоматически так, чтобы рассматриваемое транспортное средство двигалось по упомянутой траектории движения.
2. Способ помощи при вождении по п.1, который обнаруживает как любую из множества опасностей перекрестную дорогу, которая пересекается с дорогой рассматриваемого транспортного средства на одной стороне и впереди пути рассматриваемого транспортного средства, причем на основе позиционного отношения между опасностью, отличной от перекрестной дороги, во множестве опасностей и перекрестной дорогой определяется, формировать ли траекторию движения, избегающую и проходящую мимо множества опасностей.
3. Способ помощи при вождении по п.2, в котором, когда расстояние между другой опасностью и перекрестной дорогой находится в пределах предварительно определенного диапазона, формируется траектория движения, избегающая и проходящая мимо множества опасностей.
4. Способ помощи при вождении по п.2 или 3, в котором, когда дорога рассматриваемого транспортного средства имеет приоритет над перекрестной дорогой, формируется траектория движения, избегающая и проходящая мимо множества опасностей.
5. Способ помощи при вождении по любому из пп. 2-4, в котором, когда имеется транспортное средство, которое въезжает на дорогу рассматриваемого транспортного средства с перекрестной дороги, формируется траектория движения, избегающая и проходящая мимо множества опасностей.
6. Способ помощи при вождении по п. 1, в котором начальное положение руления, которое сопровождает, когда рассматриваемое транспортное средство избегает и проезжает мимо множества опасностей, переключается в соответствии с тем, находится ли перекрестная дорога, которая пересекается с дорогой рассматриваемого транспортного средства впереди пути рассматриваемого транспортного средства, на левой стороне или на правой стороне дороги рассматриваемого транспортного средства.
7. Способ помощи при вождении по п.6, в котором определяется, переключать ли начальное положение или нет, на основе позиционного отношения между перекрестной дорогой и множеством опасностей.
8. Способ помощи при вождении по п.6, в котором начальное положение переключают, когда расстояние между любой опасностью из множества опасностей, которая является ближайшей к перекрестной дороге, и перекрестной дорогой находится в пределах предварительно определенного диапазона.
9. Способ помощи при вождении по п. 8, в котором предварительно определенный диапазон установлен на основе запретной для парковки зоны вблизи перекрестка, определенной законом.
10. Способ помощи при вождении по любому из пп. 6-9, причем руление, которое сопровождает, когда рассматриваемое транспортное средство избегает и проезжает мимо множества опасностей, представляет собой руление для увеличения боковых зазоров от множества опасностей перед проездом мимо множества опасностей, в котором, когда перекрестная дорога находится ближе к рассматриваемому транспортному средству, чем множество опасностей, и находится на одной стороне, начальное положение переключается на положение ближе к рассматриваемому транспортному средству, чем перекрестная дорога.
11. Способ помощи при вождении по любому из пп. 6-9, причем руление, которое сопровождает, когда рассматриваемое транспортное средство избегает и проезжает мимо множества опасностей, представляет собой руление для увеличения боковых зазоров от множества опасностей перед проездом мимо множества опасностей, в котором, когда перекрестная дорога находится ближе к рассматриваемому транспортному средству, чем множество опасностей, и находится на другой стороне из левой стороны и правой стороны дороги рассматриваемого транспортного средства, которая является дальней от рассматриваемого транспортного средства, начальное положение переключается на положение дальше от рассматриваемого транспортного средства, чем перекрестная дорога.
12. Способ помощи при вождении по любому из пп. 6-11, причем руление, которое сопровождает, когда рассматриваемое транспортное средство избегает и проезжает мимо множества опасностей, представляет собой руление для возврата в исходное боковое положение после проезда мимо множества опасностей, в котором, когда перекрестная дорога находится дальше от рассматриваемого транспортного средства, чем множество опасностей, и находится на одной стороне, начальное положение переключается на положение дальше от рассматриваемого транспортного средства, чем перекрестная дорога.
13. Способ помощи при вождении по любому из пп. 6-11, причем руление, которое сопровождает, когда рассматриваемое транспортное средство избегает и проезжает мимо множества опасностей, представляет собой руление для возврата в исходное боковое положение после проезда мимо множества опасностей, в котором, когда перекрестная дорога находится дальше от рассматриваемого транспортного средства, чем множество опасностей, и находится на другой стороне из левой стороны и правой стороны дороги рассматриваемого транспортного средства, которая является дальней от рассматриваемого транспортного средства, начальное положение переключается на положение ближе к рассматриваемому транспортному средству, чем перекрестная дорога.
14. Способ помощи при вождении по любому из пп. 6-13, в котором начальное положение переключается, когда дорога рассматриваемого транспортного средства имеет приоритет над перекрестной дорогой.
15. Способ помощи при вождении по любому из пп. 6-14, в котором начальное положение переключается, когда имеется транспортное средство, которое въезжает на дорогу рассматриваемого транспортного средства с перекрестной дороги.
16. Способ помощи при вождении по любому из пп. 6-15, в котором, когда перекрестная дорога находится на одной стороне из левой стороны и правой стороны дороги рассматриваемого транспортного средства, которая находится близко к рассматриваемому транспортному средству, определяется величина бокового перемещения рассматриваемого транспортного средства для проезда мимо перекрестной дороги с зазором от перекрестной дороги и траектория движения, проходящая мимо множества опасностей и перекрестной дороги посредством перемещения на максимальную величину бокового перемещения среди величин бокового перемещения, соответственно определенных по отношению к множеству опасностей, и величины бокового перемещения, определенной относительно перекрестной дороги, формируется как траектория движения, избегающая и проходящая мимо множества опасностей.
17. Устройство помощи при вождении, содержащее:
датчик, выполненный с возможностью обнаруживать множество опасностей, которые соответственно присутствуют на одной стороне из левой стороны и правой стороны дороги рассматриваемого транспортного средства, которая является дорогой, по которой движется рассматриваемое транспортное средство, причем упомянутая одна сторона находится близко к рассматриваемому транспортному средству, и которые находятся в различных передних и задних положениях впереди пути рассматриваемого транспортного средства; и
контроллер, выполненный с возможностью: определять, в соответствии с типами множества опасностей, каждую из величин бокового перемещения рассматриваемого транспортного средства для избегания и проезда мимо множества опасностей с зазорами от множества опасностей; формировать траекторию движения, проходящую мимо множества опасностей в боковом положении, перемещенном на величину, равную или превышающую максимальную величину бокового перемещения среди упомянутых определенных величин бокового перемещения; и осуществлять руление автоматически таким образом, чтобы рассматриваемое транспортное средство двигалось по траектории движения.
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| УСТРОЙСТВО ПОМОЩИ ПРИ ВОЖДЕНИИ И СПОСОБ ПОМОЩИ ПРИ ВОЖДЕНИИ | 2012 |
|
RU2576362C2 |

