Изобретение относится к области ракетной техники, в частности, к осесимметричным ракетам нормальной аэродинамической схемы с трехканальной системой стабилизации, на которых применяется рулевой привод с четырьмя независимыми аэродинамическими рулями.
При разработке осесимметричных ракет нормальной аэродинамической схемы с трехканальной системой стабилизации уделяется особое внимание устойчивости пространственного движения. Несмотря на то, что ракеты являются симметричными относительно продольной оси, в полете развивается пространственное движение ракет. Одной из основных причин пространственное движения является возникновение аэродинамических перекрестных связей при управлении ракетой трехканальной системой стабилизации рулевым приводом с четырьмя независимыми аэродинамическими рулями. Аэродинамические перекрестные связи в определенных режимах полета приводят к возникновению колебаний ракеты.
Из уровня техники известны различные способы формирования команд управления на рулевой привод.
Так, известен способ формирования команд управления на рулевой привод, включающий формирование сигналов с обратной связью по угловой скорости, по боковому линейному ускорению и по углу атаки ракеты и последующую обработку полученных сигналов, [патент RU 2374602, опубликован 27.11.2009]. Данный способ недостаточно обеспечивает пространственную устойчивость летательного аппарата.
Известен способ формирования команд управления на рулевой привод, включающий формирование команд управления и подачу их на рулевой привод ракеты. Данный способ не обеспечивает пространственную устойчивость летательного аппарата, [патент RU 2148780, опубликован 10.05.2000].
Известен способ формирования команд управления на рулевой привод, предназначенный для управления летательным аппаратом нормальной аэродинамической схемы с четырьмя аэродинамическими рулями (книга Мизрохи В.Я. Проектирование управления зенитных ракет/Учебно-научное издание - М: Изд-во ООО «Экслибрис-Пресс», 2010, с. 142-145). Способ включает определение углов атаки в продольных каналах управления αу, αz и канальных команд управления δI, δII, δэ для стабилизации летательного аппарата в трех каналах управления, формирование из канальных команд управления δI, δII, δэ команд управления на рулевой привод летательного аппарата δ1, δ2, δ3, δ4 для отклонения каждого аэродинамического руля, подачу команды управления δ1, δ2, δ3, δ4 на рулевой привод по информационным или электрическим линиям связи. Описанный способ недостаточно обеспечивает устойчивость ракеты при возникающей аэродинамической перекрестной связи.
Известные из указанных патентов способы не решают техническую проблему, стоящую в области управления ракет, а именно - обеспечение их устойчивости в условиях максимального влияния дополнительных сил и моментов в продольных каналах системы стабилизации (первый и второй каналы управления) при отклонении аэродинамических рулей в канале крена системы стабилизации (третий канал управления). Возникающая при этом аэродинамическая перекрестная связь может приводить к ухудшению стабилизации и возникновению колебаний летательного аппарата. Причиной возникновения перекрестной связи является возрастающая с увеличением угла атаки несимметрия сил, действующих на каждый из четырех рулей вследствие экранирования корпусом летательного аппарата верхнего руля и увеличения эффективности нижнего руля.
Заявляемый способ направлен на решение этой проблемы.
Техническим результатом настоящего изобретения является улучшение стабилизации летательного аппарата за счет снижения влияния аэродинамической перекрестной связи и уменьшение колебаний летательного аппарата.
Указанный технический результат достигается за счет того, что для осуществления способа формирования команд управления на рулевой привод в канале крена системы стабилизации осесимметричного летательного аппарата определяют углы атаки в продольных каналах управления αу, αz и канальные команды управления δI, δII, δэ в трех каналах управления, в бортовой аппаратуре системы стабилизации вычисляют угол аэродинамического крена ϕп
с учетом угла аэродинамического крена формируют из канальных команд управления δI, δII, δэ команды управления на рулевой привод летательного аппарата δ1, δ2, δ3, δ4 для отклонения каждого аэродинамического руля по следующим математическим зависимостям:
δ4=δII-δэ⋅[1+cos(2ϕп)],
и подают команды управления δ1, δ2, δ3, δ4 на рулевой привод.
Реализация заявленного изобретения поясняется графическими материалами, на которых представлены:
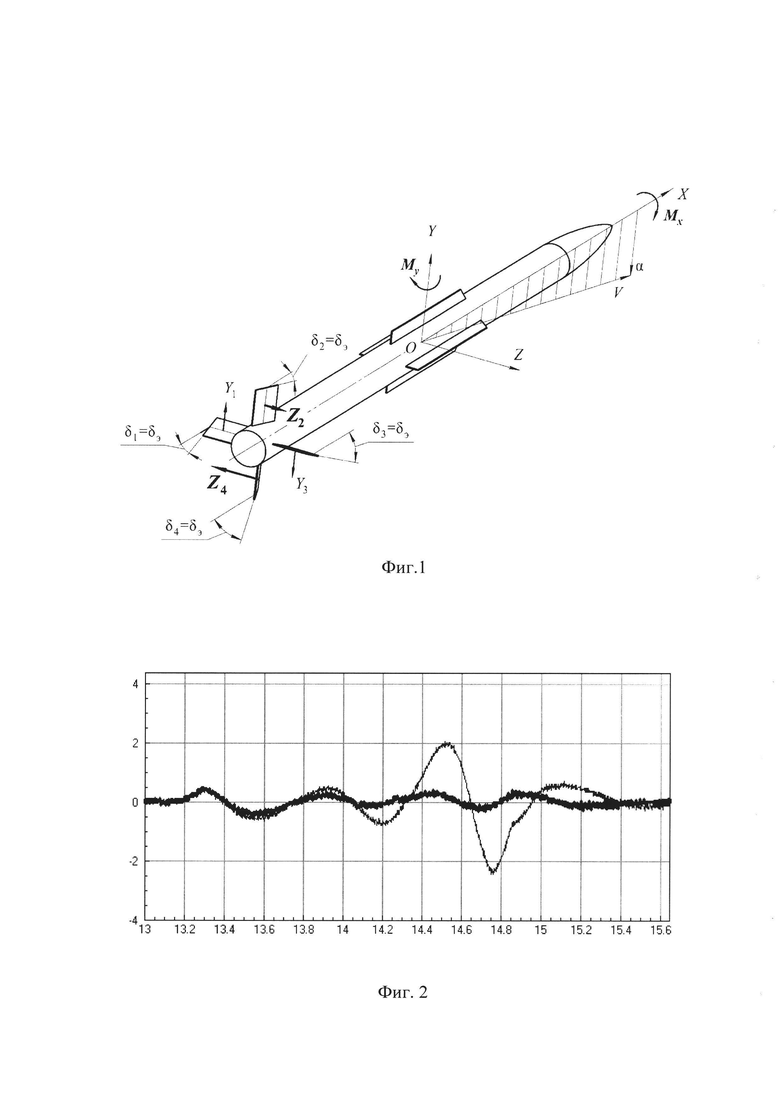
Фиг. 1 - Схема возникновения аэродинамической перекрестной связи.
Фиг. 2 - Значения δI от времени полета, режим 1.
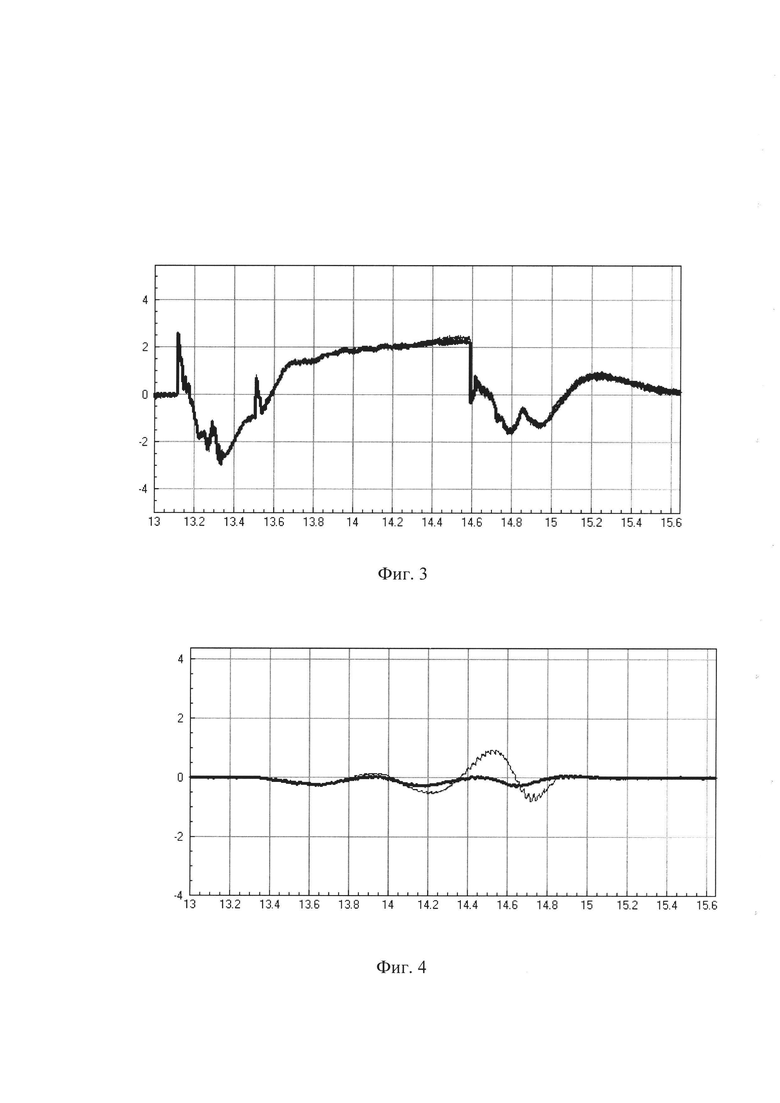
Фиг. 3 - Значения δII от времени полета, режим 1.
Фиг. 4 - Значения δэ от времени полета, режим 1.
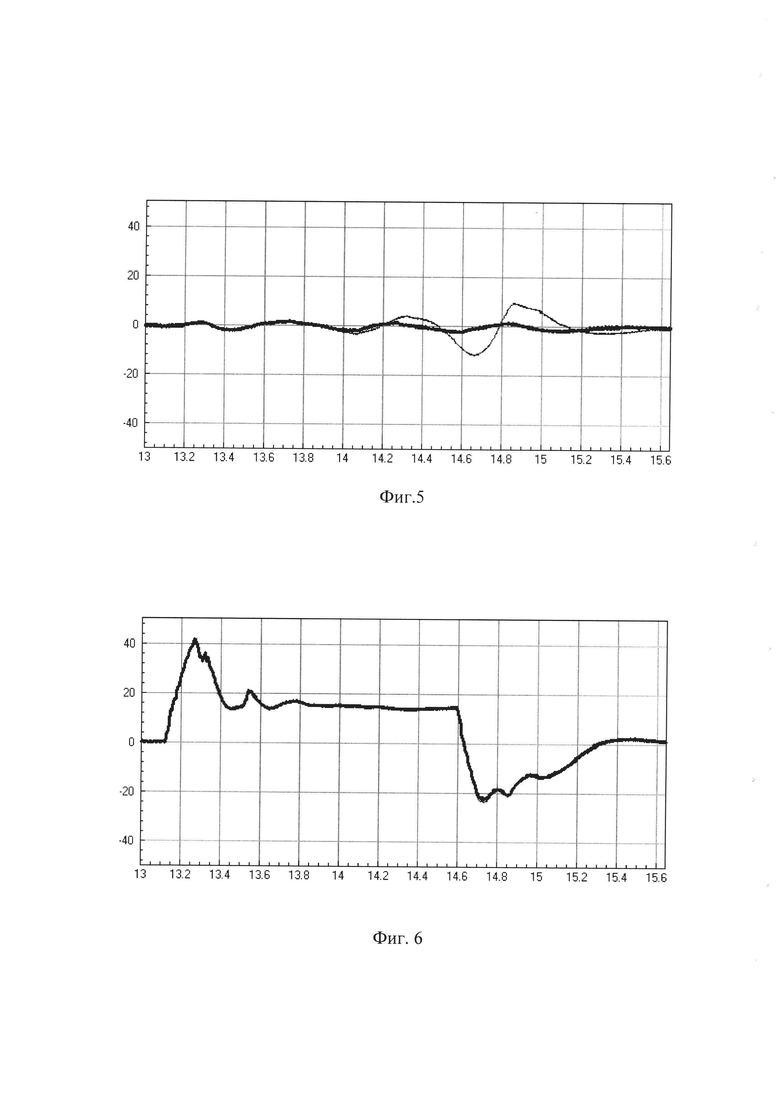
Фиг. 5 - Значения проекции угловой скорости в первом продольном канале управления от времени полета, режим 1.
Фиг. 6 - Значения проекции угловой скорости во втором продольном канале управления от времени полета, режим 1.
Фиг. 7 - Значения проекции угловой скорости в канале крена от времени полета, режим 1.
Фиг. 8 - Значения проекции линейного ускорения в первом продольном канале управления от времени полета, отнесенные к максимальным, режим 1.
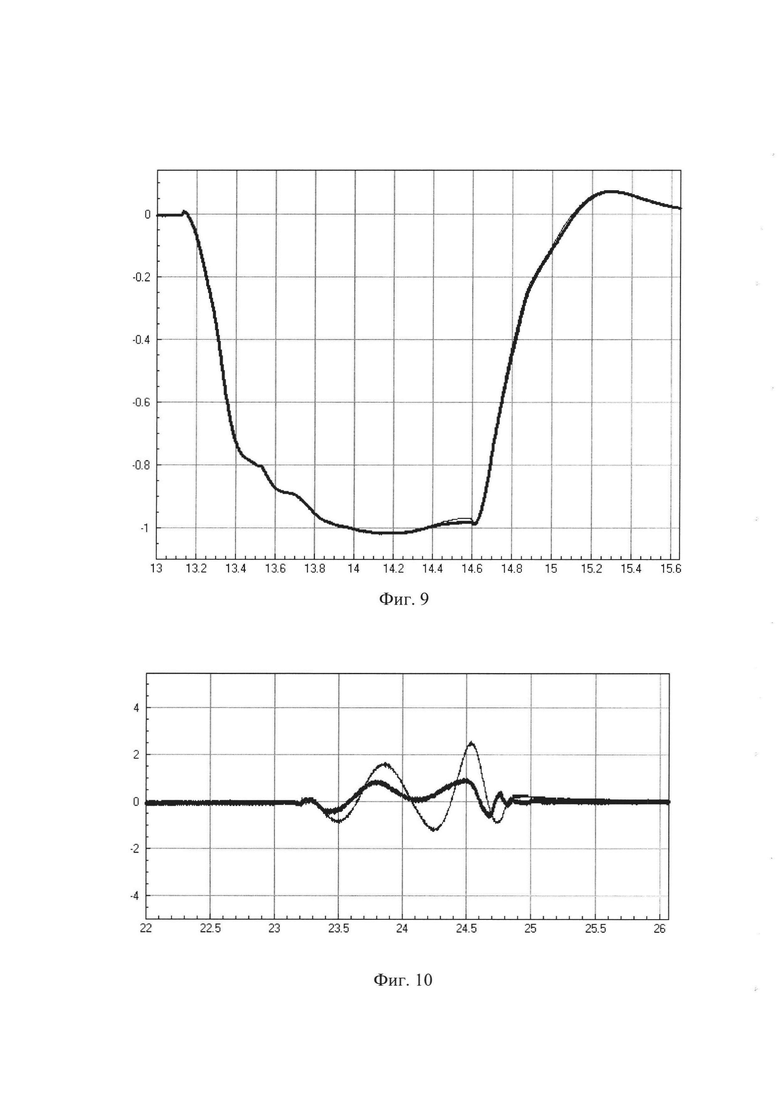
Фиг. 9 - Значения проекции линейного ускорения во втором продольном канале управления от времени полета, отнесенные к максимальным, режим 1.
Фиг. 10 - Значения δI от времени полета, режим 2.
Фиг. 11 - Значения δII от времени полета, режим 2.
Фиг. 12 - Значения δэ от времени полета, режим 2.
Фиг. 13 - Значения проекции угловой скорости в первом продольном канале управления от времени полета, режим 2.
Фиг. 14 - Значения проекции угловой скорости во втором продольном канале управления от времени полета, режим 2.
Фиг. 15 - Значения проекции угловой скорости в канале крена от времени полета, режим 2.
Фиг. 16 - Значения проекции линейного ускорения в первом продольном канале управления от времени полета, отнесенные к максимальным, режим 2.
Фиг. 17 - Значения проекции линейного ускорения во втором продольном канале управления от времени полета, отнесенные к максимальным, режим 2.
Режим полета осесимметричного летательного аппарата, при котором возникает аэродинамическая перекрестная связь, можно описать следующими величинами, показанными на фиг. 1:
δ1, δ2, δ3, δ4 - углы отклонения аэродинамических рулей,
α - угол атаки,
OXYZ - оси связанной системы координат,
V - вектор скорости,
Y1, Y3 - дополнительные нормальные силы от отклонения аэродинамических рулей №1 и №3,
Z2, Z4 - дополнительные нормальные силы от отклонения аэродинамических рулей №2 и №4,
Мх - момент в канале крена,
Му - момент в продольном канале.
В режиме полета осесимметричного летательного аппарата четыре его аэродинамических руля отклонены на угол, равный канальной команде δэ для создания управляющего момента в канале крена Мх. При этом, из-за разности дополнительных нормальных сил на руле №2 и №4 возникает дополнительная продольная сила и, как следствие, дополнительный аэродинамический момент в продольном канале управления Му.
Таким образом, команды, подаваемые на рулевой привод, формируют такое сочетание углов отклонения аэродинамических рулей, при котором возникают эффекты взаимовлияния каналов управления системы стабилизации из-за аэродинамических перекрестных связей, в частности возникновение дополнительных аэродинамических сил и моментов в продольных каналах системы стабилизации при отклонении аэродинамических рулей в канале крена. При этом происходит ухудшение стабилизации и возникновение колебаний летательного аппарата.
Заявляемый способ позволяет уменьшить влияния дополнительных аэродинамических сил и моментов в продольных каналах системы стабилизации при отклонении аэродинамических рулей в канале крена и обеспечить пространственную устойчивость системы стабилизации и уменьшить колебания осесимметричного летательного аппарата. Это достигается за счет уменьшения участия двух аэродинамических рулей в управлении каналом крена и увеличения значения двух других аэродинамических рулей при управлении в канале крена при режимах полета летательного аппарата близких к схеме «+».
Для формирования команд управления на рулевой привод в канале крена системы стабилизации осесимметричного летательного аппарата бортовая аппаратура системы стабилизации определяет углы атаки (αу, αz) в продольных каналах управления. Углы атаки в продольных каналах управления могут быть определены с помощью датчиков измерения углов атаки или расчетом.
Кроме того, бортовая аппаратура системы стабилизации определяет команды управления в трех каналах управления: в двух продольных каналах - δI, δII и в канале крена - δэ.
Далее, исходя из полученных значений углов атаки в продольных каналах управления αу, αz в бортовой аппаратуре системы стабилизации вычисляют угол аэродинамического крена (ϕп)
Из полученных канальных команд управления δI, δII, δэ в бортовой аппаратуре системы стабилизации формируют команды управления на рулевой привод летательного аппарата δ1, δ2, δ3, δ4 для отклонения каждого аэродинамического руля. Формирование команд управления на рулевой привод для отклонения каждого аэродинамического руля осуществляют с учетом вычисленного угла аэродинамического крена (ϕп) по следующим математическим зависимостям:
После этого подают с помощью бортовой аппаратуры системы стабилизации команды управления δ1, δ2, δ3, δ4 на рулевой привод летательного аппарата по информационным или электрическим линиям связи.
Заявляемый способ формирования команд управления δ1, δ2, δ3, δ4 уменьшает участие двух противолежащих аэродинамических рулей в управлении каналом крена, при этом увеличивает значения двух других аэродинамических рулей при управлении в канале крена в определенных режимах полета.
Заявляемый способ является промышленным-применимым. На фиг. 2÷17 графических материалов представлены результаты имитационного математического моделирования для двух режимов полета летательного аппарата, отличающихся разным уровнем линейных ускорений в продольных каналах управления: режим 1 соответствует максимальному уровню линейных ускорений, режим 2 соответствует 30% от максимального уровня линейных ускорений. На фиг. 2÷17 утолщенной линией представлены результаты моделирования заявляемого способа формирования сигналов управления на рулевой привод, тонкой линией - результаты моделирования известного способа (описанного в книге Мизрохи В.Я. Проектирование управления зенитных ракет).
На фиг. 2-17 графических материалов видно, что степень влияния аэродинамической перекрестной связи и уровень колебаний в случае использования заявляемого способа значительно ниже в сравнении с известным способом (так, для приведенных режимов, показанных на фиг.2÷17, уровень колебаний уменьшился более чем на 50%). В одинаковых условиях это достигается за счет уменьшения несимметрии сил, действующих на каждый из четырех аэродинамических рулей при управлении в канале крена.
Предлагаемый способ формирования команд на рулевой привод в канале крена системы стабилизации может применяться в осесиметричных летательных аппаратах с трехканальной системой стабилизации и рулевым приводом с четырьмя независимыми аэродинамическими рулями. Проведенное в рамках осуществления способа имитационное математическое моделирование режимов полета летательного аппарата подтвердило улучшение стабилизации и уменьшение колебаний летательного аппарата за счет снижения влияния аэродинамической перекрестной связи.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ формирования команд управления на рулевой привод системы стабилизации осесимметричного летательного аппарата | 2021 |
|
RU2763512C1 |
| СПОСОБ УПРАВЛЕНИЯ СКОРОСТЬЮ ПОЛЕТА РАКЕТЫ НОРМАЛЬНОЙ АЭРОДИНАМИЧЕСКОЙ СХЕМЫ С Х-ОБРАЗНО РАСПОЛОЖЕННЫМИ РУЛЯМИ | 2012 |
|
RU2510485C2 |
| СПОСОБ УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ РАКЕТЫ КОСМИЧЕСКОГО НАЗНАЧЕНИЯ | 2011 |
|
RU2475428C1 |
| АВТОПИЛОТ ДЛЯ СИММЕТРИЧНОЙ ЗЕНИТНОЙ УПРАВЛЯЕМОЙ РАКЕТЫ | 2006 |
|
RU2302358C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА В КАНАЛЕ КУРСА | 2021 |
|
RU2768310C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ-КОНВЕРТОПЛАН-АМФИБИЯ (ВАРИАНТЫ) | 2005 |
|
RU2312795C2 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ УПРАВЛЕНИЯ РАКЕТОЙ С КРЕСТООБРАЗНЫМ РАСПОЛОЖЕНИЕМ КРЫЛЬЕВ | 1980 |
|
RU2089452C1 |
| СПОСОБ НЕПАРАМЕТРИЧЕСКОЙ ИДЕНТИФИКАЦИИ НЕЛИНЕЙНЫХ АЭРОДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ЛЕТАТЕЛЬНОГО АППАРАТА ПО РЕЗУЛЬТАТАМ ЛЁТНЫХ ИССЛЕДОВАНИЙ | 2014 |
|
RU2560244C1 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ С АЭРОДИНАМИЧЕСКИМИ РУЛЯМИ | 2000 |
|
RU2182306C2 |
| Моделирующий комплекс для отладки системы управления автономным подвижным объектом | 2017 |
|
RU2662331C1 |



Изобретение относится к способу формирования команд управления на рулевой привод в канале крена системы стабилизации осесимметричного летательного аппарата. Для формирования команд управления определяют углы атаки в двух продольных каналах управления (αу, αz) и команды управления (δI, δII, δэ) в трех каналах управления, вычисляют в бортовой аппаратуре системы стабилизации угол аэродинамического крена определенным образом, формируют с учетом угла аэродинамического крена четыре команды управления на рулевой привод летательного аппарата (δ1, δ2, δ3, δ4) для отклонения каждого аэродинамического руля определенным образом и подают эти команды на рулевой привод. Обеспечивается улучшение стабилизации летательного аппарата за счет снижения влияния аэродинамической перекрестной связи и уменьшение колебаний летательного аппарата. 17 ил.
Способ формирования команд управления на рулевой привод в канале крена системы стабилизации осесимметричного летательного аппарата, при котором определяют углы атаки в продольных каналах управления αу, αz и канальные команды управления δI, δII, δэ в трех каналах управления, в бортовой аппаратуре системы стабилизации вычисляют угол аэродинамического крена ϕп

с учетом угла аэродинамического крена формируют из канальных команд управления δI, δII, δэ команды управления на рулевой привод летательного аппарата δ1, δ2, δ3, δ4 для отклонения каждого аэродинамического руля по следующим математическим зависимостям:

и подают команды управления δ1, δ2, δ3, δ4 на рулевой привод.
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ УПРАВЛЕНИЯ РАКЕТОЙ С КРЕСТООБРАЗНЫМ РАСПОЛОЖЕНИЕМ КРЫЛЬЕВ | 1980 |
|
RU2089452C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ ВОКРУГ ПРОДОЛЬНОЙ ОСИ ДВУХКАНАЛЬНОЙ РАКЕТОЙ | 2012 |
|
RU2511610C1 |
| US 3946968 A1, 30.03.1976 | |||
| US 4234142 A1,18.11.1980 | |||
| АНТИДИАБЕТИЧЕСКОЕ СРЕДСТВО | 2001 |
|
RU2195300C1 |

