Изобретение относится к области авиационной техники, а именно, к применению турбовинтовых двигателей с воздушным винтом изменяемого шага, использующим гидромеханический принцип действия механизма поворота лопастей, в качестве силовой установки самолета и способам их эксплуатации, в частности, к способам защиты силовой установки самолета от отрицательной тяги в полете, создаваемой турбовинтовым двигателем с воздушным винтом изменяемого шага, при возникновении отказа турбовинтового двигателя и его системы автоматического управления или отказа воздушного винта и его системы автоматического управления.
Из уровня техники известен способ [1] защиты силовой установки самолета от отрицательной тяги, создаваемой воздушным винтом изменяемого шага, с использованием системы автоматического флюгирования по команде от датчика отрицательной тяги на валу воздушного винта при появлении отрицательной тяги на номинальном режиме работы турбовинтового двигателя. Основным недостатком указанного способа является ограниченность использования функции автоматической защиты при появлении отрицательной тяги, так как ее срабатывание происходит только при углах установки лопастей воздушного винта свыше 30° (что соответствует режимам работы выше полетного малого газа), при этом сигнал с датчика отрицательной тяги является дискретным (электрический сигнал при превышении настроечного уровня отрицательной тяги) и не дает представления об уровне заброса тяги, создаваемой воздушным винтом изменяемого шага. Также указанный способ потребует введения дополнительных каналов управления в конструкцию двигателя, что приведет к увеличению габаритных размеров и массы двигателя.
Сущность проблемы - отсутствие в настоящее время консолидированного подхода к созданию турбовинтовых двигателей, в том числе, единой нормативной базы, учитывающего все особенности проектирования двигателей такого типа в Российской Федерации, в конструкции разрабатываемых двигателей не закладываются решения, необходимые для организации систем защиты и управления воздушного винта (узел измерителя тяги). Данное обстоятельство усложняет вопрос обеспечения безопасности полетов самолетов с турбовинтовыми двигателями. Возникновение отрицательной тяги в полете, создаваемой турбовинтовым двигателем с воздушным винтом изменяемого шага, может привести к катастрофическим последствиям.
Техническим результатом, достигаемым при использовании настоящего изобретения, является эффективное предотвращение появления нежелательного уровня отрицательной тяги вне зависимости от источника, причины и вида возникшего отказа, что дает возможность повысить безопасность полетов самолетов с турбовинтовыми двигателями.
Указанный технический результат достигается тем, что в известном способе защиты силовой установки самолета от отрицательной тяги в структуру электронного регулятора системы автоматического управления силовой установки самолета вводится дополнительный канал, ограничивающий минимальную тягу, путем воздействия на основной исполнительный механизм управления воздушным винтом, а для расчета значения тяги используется алгоритм, для осуществления которого требуется:
- наличие в конструкции турбовинтового двигателя узла измерения углового положения лопастей воздушного винта, обеспечивающего точность замера в соответствии с предъявляемыми требованиями по точности расчета значения тяги;
- наличие аэродинамических характеристик воздушного винта (полученных расчетным или экспериментальным путем), охватывающих, в том числе, область отрицательных значений тяги (отрицательных значений коэффициента тяги а);
- точность аэродинамических характеристик воздушного винта должна соответствовать предъявляемым требованиям к точности расчета значения тяги;
- измерение (непосредственное или посредством бортовых систем) электронным блоком системы автоматического управления следующих параметров: приборная скорость полета Vпр, давление воздуха окружающей среды рн, температура воздуха окружающей среды tн, частота вращения воздушного винта nвв, угловое положение лопастей воздушного винта ϕ;
- точность измерения перечисленных выше параметров должна соответствовать предъявляемым требованиям к точности расчета значения тяги, создаваемой воздушным винтом изменяемого шага;
Тяга R, создаваемая турбовинтовым двигателем с винтом изменяемого шага, определяется зависимостью R=Rвв+Rву, где Rвв - расчетное значение тяги, создаваемой воздушным винтом изменяемого шага, a Rву - расчетное значение тяги выходного устройства турбовинтового двигателя.
Ввиду незначительного влияния тяги выходного устройства турбовинтового двигателя на общую тягу силовой установки, можно допустить, что R=Rвв⋅В этом случае условие срабатывания защитных функций и канала ограничения отрицательной тяги примет вид Rвв≤Rmin, где Rmin - минимальное допустимое значение тяги в полете, задаваемое разработчиком летательного аппарата.
Расчетная функция тяги представлена в виде зависимости Rвв=ƒ(Vпр, рн, tн, nвв, ϕ),
где Vпр - значение приборной скорости полета, км/ч;
рн - измеренное значение давления воздуха окружающей среды, 
tн - измеренное значение температуры воздуха окружающей среды,°С;
nвв - измеренное значение частоты вращения воздушного винта, об/мин;
ϕ - измеренное значение углового положения лопастей воздушного винта,°.
Расчет значения Rвв производится в следующей последовательности (п. 1 - п. 6).
1. Расчет значения плотности наружного воздуха рн, 

2. Расчет значения истинной скорости полета Vист, км/ч:

где р0=1.225 кг/м3 - плотность воздуха в соответствии с Международной стандартной атмосферой для высоты Н=0 км, температуры воздуха tн=288.15 К.
3. Расчет значения относительной поступи воздушного винта λ, 1:

где D - диаметр воздушного винта, м.
4. Расчет значения числа Маха М, 1:

где k=1.401 - показатель адиабаты для наружного воздуха, 1;
R=287.05 - газовая постоянная, 
5. Расчет значения коэффициента тяги α.
Коэффициент тяги α определяется по многомерной аэродинамической характеристике воздушного винта, представленной в виде зависимости α=ƒ(M, ϕ, λ), путем поузловых линейных интерполяций, проводимых в 3 этапа (фиг. 1) по аналогии с [2].
На первом этапе производится выбор двух групп характеристик α=ƒ(ϕ, λ) для чисел Мi-1 и Mi+1, где Мi-1<Mi<Mi+1, а Мi=М - расчетное значение числа Маха. Затем в выбранных группах характеристик Мi-1 и Mi+1 производится выбор двух известных характеристик α=ƒ(λ) для чисел ϕi-1 и ϕi+1, где ϕi-1<ϕi<ϕi+1 a ϕi=ϕ - измеренное угловое положение лопастей воздушного винта. Далее в выбранных группах характеристик и Mi-1 и Mi+1 производится линейная поузловая интерполяция для нахождения характеристики αϕi=ƒ(λ). Поузловая линейная интерполяция заключатеся в последовательном расчете каждой точки характеристики αϕi=ƒ(λ) по формулам (Фиг. 2):


где k изменяется от 1 до n, а n - общее количество точек характеристики αϕi=ƒ(λ).
На втором этапе производится поузловая линейная интерполяция для нахождения характеристики αϕi,Mi=ƒ(λ) по рассчитанным на первом этапе характеристикам для известного числа М. Для этого последовательно рассчитываются значения каждой точки характеристики по формулам:


где k изменяется от 1 до n, а n - общее количество точек характеристики αϕi,Mi=ƒ(λ).
На третьем этапе производится расчет величины αi (Фиг. 1, Этап III) по формуле:

где λi-1<λi<λi+1, a λi=λ - расчетное значение относительной поступи воздушного винта.
Расчетное значение коэффициента тяги α=αi.
При выходе значения параметра ϕ (или М, или λ) за диапазон, заложенный в применяемую аэродинамическую характеристику воздушного винта, его следует принимать равным соответствующему максимальному или минимальному значению диапазона параметра ϕ (или М, или λ).
6. Расчет значения тяги, создаваемой воздушным винтом изменяемого шага, Rвв, кгс:

где g=9.81 - ускорение свободного падения, м/с2.
Способ применяется следующим образом.
Пример.
Предварительно проведено моделирование неисправной ситуации воздушного винта мощностью 3000 л.с. Результаты моделирования представлены на Фиг. 4. При сбое исполнительного механизма управления воздушным винтом, приводящем к самопроизвольному уменьшению шага воздушного винта, происходит раскрутка воздушного винта и как следствие увеличение уровня отрицательной тяги, создаваемой воздушном винтом. Одним из защитных механизмов от возникновения отрицательной тяги в полете выбранного воздушного винта является промежуточный упор, предотвращающий перемещение лопастей ниже минимального полетного угла, промежуточный упор является полностью автономным устройством, конструктивно реализуемым непосредственно во втулке воздушного винта. Принцип действия промежуточного упора заключается в выдаче гидравлической команды на срабатывание гидравлического фиксатора шага воздушного винта при выполнении следующего условия: ϕ ≤ ϕпу, где ϕ - фактическое угловое положение лопастей воздушного винта, а ϕпу - заданное угловое положение лопастей воздушного винта, при котором происходит срабатывание промежуточного упора. Еще одно защитное устройство выбранного воздушного винта - гидравлический затяжелитель шага. Срабатывание затяжелителя происходит при раскрутке воздушного винта до настроечной величины частоты вращения и приводит к перемещению лопастей воздушного винта в сторону флюгерного углового положения (в сторону затяжеления). Дополнительно для защиты воздушного винта от изменения параметров используется гидравлический фиксатор шага, который выполняет функцию устройства «запирающего» каналы управления гидравлического механизма изменения шага винта по команде от электронного регулятора системы автоматического управления.
По результатам моделирования определено, что после сбоя исполнительного механизма управления воздушным винтом отрицательная тяга возникает при нахождении лопастей воздушного винта выше промежуточного упора, а при срабатывании затяжелителя происходят колебания тяги (Rвв), создаваемой воздушным винтом, от -500 кгс до 1500 кгс, снятие гидравлической команды на затяжеление воздушного винта приводит к очередному облегчению, что в свою очередь влечет за собой еще одно колебание тяги, создаваемой воздушным винтом.
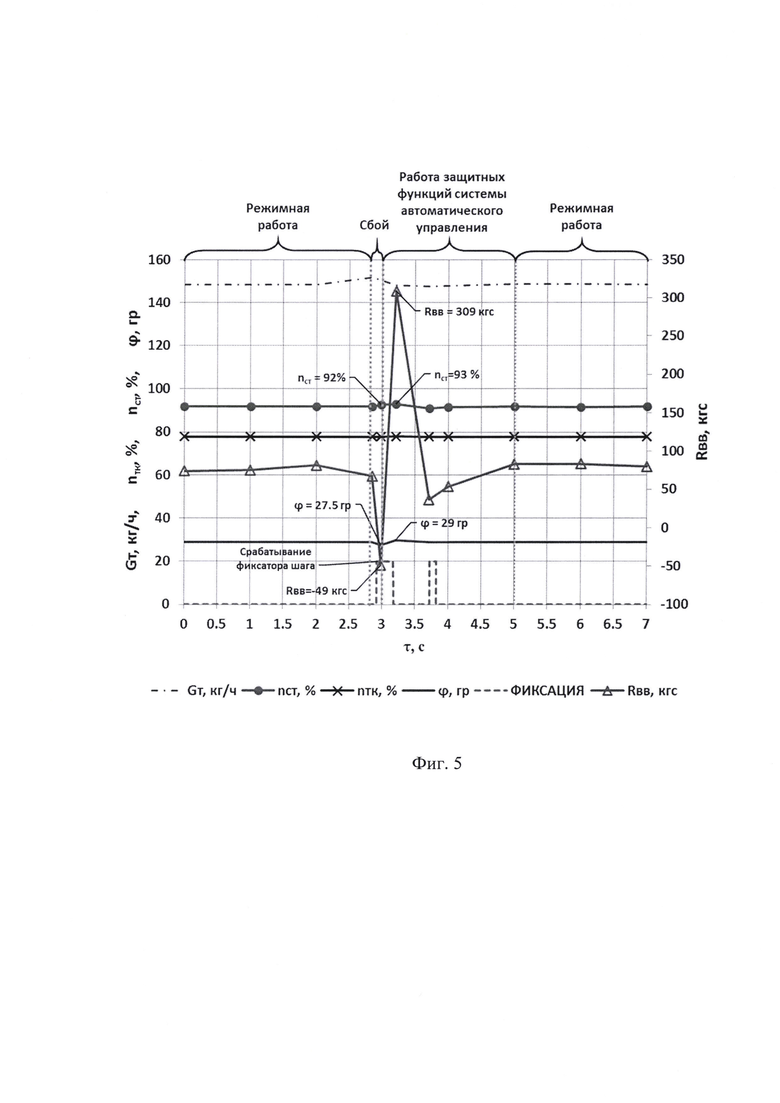
Затем в структуру регулятора частоты вращения воздушного винта введен дополнительный канал, ограничивающий минимальную тягу путем воздействия на основной исполнительный механизм управления воздушным винтом (Фиг. 3) и введено условие срабатывания фиксатора шага по условию ΔRвв.min≤const. Далее проведено повторное моделирование сбоя исполнительного механизма управления воздушным винтом, приводящего к самопроизвольному уменьшению шага воздушного винта и возникновению отрицательной тяги. При увеличении рассогласования (ΔRвв.min) между заданной величиной тяги воздушного винта и фактическим значением, рассчитанным системой автоматического управления, увеличивается значение управляющего воздействия  на основной исполнительный механизм (Фиг. 3). Как только величина управляющего воздействия
на основной исполнительный механизм (Фиг. 3). Как только величина управляющего воздействия  канала ограничения минимальной тяги превысит величину управляющего воздействия
канала ограничения минимальной тяги превысит величину управляющего воздействия  канала управления частотой вращения воздушного винта, управление основным исполнительным механизмом будет происходить по каналу ограничения минимальной тяги (Фиг. 5). При этом на время опережения управляющего воздействия
канала управления частотой вращения воздушного винта, управление основным исполнительным механизмом будет происходить по каналу ограничения минимальной тяги (Фиг. 5). При этом на время опережения управляющего воздействия  канала управления частотой вращения воздушного винта гидравлический фиксатор шага ограничивает дальнейшее облегчение воздушного винта до момента начала управления основным исполнительным механизмом по каналу ограничения минимальной тяги
канала управления частотой вращения воздушного винта гидравлический фиксатор шага ограничивает дальнейшее облегчение воздушного винта до момента начала управления основным исполнительным механизмом по каналу ограничения минимальной тяги 
Способ позволяет избежать нежелательного уровня отрицательной тяги, создаваемой воздушным винтом, без введения изменений в конструкцию силовой установки самолета, и повысить надежность полетов самолетов с турбовинтовыми самолетами.
[1] Авиационный турбовинтовой двигатель АИ-24Т Инструкция по эксплуатации, издательство «Машиностроение» 1971 г.);
[2] Годованюк, А.Г. Методика представления и использования характеристик соосного винтовентилятора при полунатурном моделировании ТВВД: дис. … канд. техн. наук: 05.07.05 / Годованюк Алексей Геннадьевич. - Уфа, 2011. - 166 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ТУРБОВИНТОВОГО ДВИГАТЕЛЯ | 1992 |
|
RU2022144C1 |
| ВЫСОКОСКОРОСТНОЙ РЕАКТИВНЫЙ САМОЛЕТ-ВЕРТОЛЕТ | 2018 |
|
RU2706294C1 |
| ГИБРИДНЫЙ РЕАКТИВНЫЙ САМОЛЕТ-ВЕРТОЛЕТ | 2019 |
|
RU2706430C1 |
| КОНВЕРТИРУЕМЫЙ ДВУХКИЛЕВОЙ ДОЗВУКОВОЙ САМОЛЕТ ТРЕХВАРИАНТНОГО БАЗИРОВАНИЯ | 2024 |
|
RU2833909C1 |
| ВЕРТОПЛАН - СКОРОСТНОЙ ВИНТОКРЫЛЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2014 |
|
RU2573698C2 |
| БЕСПИЛОТНЫЙ РЕАКТИВНЫЙ САМОЛЕТ-ВЕРТОЛЕТ | 2018 |
|
RU2699513C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ДВИГАТЕЛЯ | 2013 |
|
RU2638883C2 |
| КРИОГЕННЫЙ ЭЛЕКТРИЧЕСКИЙ ВЕРТОЛЕТ-САМОЛЕТ | 2013 |
|
RU2529568C1 |
| СПОСОБ КОМПЕНСАЦИИ РЕАКТИВНОГО МОМЕНТА НЕСУЩЕГО ВИНТА | 2012 |
|
RU2514010C1 |
| СПОСОБ УПРАВЛЕНИЯ ТУРБОВИНТОВОЙ СИЛОВОЙ УСТАНОВКОЙ | 2009 |
|
RU2449146C2 |




Изобретение относится к способу защиты силовой установки самолета от отрицательной тяги в полете, создаваемой турбовинтовым двигателем с воздушным винтом изменяемого шага. Для защиты силовой установки от отрицательной тяги рассчитывают тягу воздушного винта по измеряемым параметрам воздушного винта определенным образом с использованием параметров полета летательного аппарата и с использованием дополнительного канала управления воздушным винтом по неизмеряемому параметру, ограничивающему минимальную тягу, создаваемую турбовинтовым двигателем, путем воздействия на основной исполнительный механизм управления воздушным винтом, и с использованием защитных функций, воздействующих на элементы гидромеханизма поворота лопастей. Обеспечивается повышение безопасности полетов за счет эффективного предотвращения появления нежелательного уровня отрицательной тяги в полете. 1 з.п. ф-лы, 5 ил.
1. Способ защиты силовой установки самолета от отрицательной тяги в полете, создаваемой турбовинтовым двигателем с воздушным винтом изменяемого шага, использующим гидромеханический принцип действия механизма поворота лопастей, отличающийся тем, что тяга воздушного винта представлена зависимостью Rвв=ƒ(Vпр, pн, tн, nвв, ϕ) и рассчитывается по измеряемым параметрам воздушного винта, таким как измеренное угловое положение лопастей, частота вращения воздушного винта, и аэродинамическим характеристикам, полученным расчетным или экспериментальным путем с использованием параметров полета летательного аппарата, таких как скорость полета, температура воздуха окружающей среды, давление воздуха окружающей среды для корректировки полученного значения по плотности воздуха окружающей среды, в электронном регуляторе системы автоматического управления силовой установки, при этом в структуре электронного регулятора системы автоматического управления силовой установки самолета используется дополнительный канал управления воздушным винтом по неизмеряемому параметру, ограничивающий минимальную тягу, создаваемую турбовинтовым двигателем с воздушным винтом изменяемого шага, путем воздействия на основной исполнительный механизм управления воздушным винтом, а также используются защитные функции, косвенно воздействующие на элементы гидромеханизма поворота лопастей воздушного винта.
2. Способ по п. 1, отличающийся тем, что в конструкции силовой установки турбовинтового двигателя не используется измеритель тяги.
| SU 1172181 A1, 10.08.2004 | |||
| EP 1327750 A3, 29.12.2004 | |||
| CN 105986932 A, 05.10.2016 | |||
| US 20180135557 A1, 17.05.2018 | |||
| RU 94011352 A1, 27.09.1996. |

