Изобретение относится к области радиолокации, а именно - к системам обработки радиолокационной информации (РЛИ). Оно может быть использовано для измерения траекторных параметров отдельных элементов и сгустков элементов групповых баллистических объектов (ГБО).
Известны методы и средства цифровой обработки РЛИ [1-4], предназначенные для измерения параметров ГБО.
Так, например, известна система обработки РЛИ для измерения траекторных параметров ГБО [1]. В этой системе выход устройства формирования зондирующих сигналов соединен со входом передающей антенны. Выход приемной антенны соединен со входом устройства усиления и преобразования принимаемых сигналов. При этом передающая антенна и приемная антенна структурно входят в приемопередающее устройство. Выход устройства усиления и преобразования принимаемых сигналов связан со входом устройства первичной обработки сигналов. Первый выход устройства первичной обработки сигналов связан со входом устройства вторичной обработки информации, а второй выход - с первым входом устройства отображения и связи с потребителем. Устройство вторичной обработки информации соединено первым выходом со вторым входом устройства отображения и связи с потребителем, а вторым выходом - с устройством для расчета траекторных параметров ГБО, а именно -со входом блока разбиения множества объектов на подмножества, который структурно входит в состав устройства для расчета траекторных параметров ГБО. Указанное устройство для расчета траекторных параметров ГБО состоит из блока обработки РЛИ обзора и блока межобзорной обработки РЛИ. Блок обработки РЛИ обзора включает в свой состав три блока: блок разбиения множества объектов на подмножества, блок ранжирования и блок расчета геометрических центров подмножеств. Блок межобзорной обработки РЛИ состоит из блока отождествления подмножеств, запоминающего устройства (ЗУ) и блока вычисления траекторных параметров. Выход устройства для расчета траекторных параметров ГБО, являющийся выходом блока вычисления траекторных параметров, соединен с третьим входом устройства отображения и связи с потребителем. Устройство отображения и связи с потребителем соединено вход-выходом с вход-выходом блока управления измерением параметров ГБО. При этом устройство отображения и связи с потребителем и блок управления измерением параметров ГБО структурно входят в состав автоматизированного рабочего места (АРМ) оператора.
Блоки, входящие в устройство для расчета траекторных параметров ГБО соединены следующим образом. Блок разбиения множества объектов на подмножества своим входом соединен со вторым выходом устройства вторичной обработки информации, а своим выходом - со входом блока ранжирования. Блок ранжирования первым выходом соединен со входом блока отождествления подмножеств, а вторым выходом - со входом блока расчета геометрических центров подмножеств, выход которого соединен со вторым входом ЗУ. Блок отождествления подмножеств выходом соединен с первым входом ЗУ, выход которого связан со входом блока вычисления траекторных параметров, который связан своим выходом с третьим входом устройства отображения и связи с потребителем.
Для измерения параметров ГБО устройство вторичной обработки информации снабжено встроенным программно-алгоритмическим обеспечением, основанным на стробовой [2, с. 294-297] обработке РЛИ.
Поскольку цепи синхронизации и сигналы управления, связанные с выходом блока управления измерением параметров ГБО, принципиальным образом не сказываются на выполнении основных функций системы [1], их описание не приводится.
Недостатком системы [1] является то, что для учета степени перегрузки вычислителя устройства вторичной обработки информации и резервов его оперативной памяти при установлении порогового уровня преобразования значения функций принадлежности в булевы используется интеллект оператора, который не всегда способен выполнить эту операцию с требуемой точностью (без ошибок). При этом использование порога играет в процессе измерения траекторных параметров ГБО важную роль, а именно, позволяет значительно снизить возможность формирования ложных трасс. Так при наличии в зоне обзора радиолокационной системы большого числа близко расположенных движущихся объектов возникает необходимость в вычислении (по данным захвата) траекторий всех наблюдаемых объектов в отдельности. Для этого в процессе нескольких последовательных захватов координаты всех обнаруженных ГБО запоминаются, и на всю накопленную совокупность координат обнаруженных объектов накладываются гипотетические траектории для последующего сопровождения наиболее правдоподобных. Эта особенность функционирования устройства вторичной обработки информации приводит к следующему: чем большее число объектов находится в зоне обзора, тем более масштабные вычислительные ресурсы (загруженность вычислителя и оперативная память) будут задействованы. Вскрыто наличие устойчивой связи между сложностью задачи (числом близкорасположенных объектов) и загруженностью вычислителя. С другой стороны, чем большее число близкорасположенных объектов находится в зоне обзора, тем меньший порог булевизации (процедура преобразования значений в булевые) необходимо использовать с целью недопущения перепутывания траекторий выделяемых групп объектов. Результаты вычислительных экспериментов показывают, что для каждого варианта сложности обстановки существует свой индивидуальный порог булевизации (порог учета объекта при группировании). Он косвенно связан с перегрузкой вычислителя и сложен в определении. Поэтому для исключения ошибок и повышения точности операция установления порога должна решаться алгоритмически.
Учитывая высокую вероятность наличия в зоне обзора современных радиолокационных систем большого количества воздушно-космических объектов (ВКО), выполнение задач траекторных измерений без погрешностей и ошибок для человека-оператора является затруднительным, поскольку оно зависит как от объективных (например, сложность обстановки) так и от субъективных факторов (усталость, морально-психологическое состояние, недостаточный уровень профессиональной подготовленности и пр.).
Задачей изобретения является обеспечение более правильного и обоснованного объединения обнаруженных объектов в группы (подмножества), связанные родственными траекторными признаками, и минимизация вероятности формирования ложных трасс ГБО за счет более точного алгоритмического (с привлечением программного обеспечения) определения степени загруженности вычислителя устройства вторичной обработки информации, что ведет к более точному определению уровня порога учета объектов при их группировании и определении их траекторных параметров. Техническим эффектом будет являться уменьшение количества ложных трасс ГБО за счет исключения из обработки и операций группирования объектов, слабо коррелирующих с другими объектами по координатным и траекторным признакам.
Решение поставленной задачи обеспечивается тем, что выполняемую ранее оператором функцию определения порога β учета объектов при их группировании, необходимую для выполнения известной из теории нечеткой логики процедуры вычисления значащих функций принадлежности объекта какой-либо группе предлагается более точно выполнять алгоритмически с учетом вычислительных ресурсов устройства вторичной обработки информации.
Практически решение поставленной задачи предлагается выполнить за счет дополнения известной системы [1] блоком сравнения, вход которого предлагается соединить с третьим выходом устройства вторичной обработки информации, а выход - связать со вторым входом блока ранжирования. Введение блока сравнения в устройство для расчета траекторных параметров ГБО позволяет оперативно и автоматически принимать решение об исключении из обработки объектов с низкоуровневыми функциями принадлежности к группе.
На фиг. 1 представлена структурная схема предлагаемой системы обработки радиолокационной информации.
Система обработки радиолокационной информации содержит устройства и блоки, соединенные следующим образом. Выход устройства формирования зондирующих сигналов 1 соединен с входом передающей антенны 2. Выход приемной антенны 4 соединен с входом устройства усиления и преобразования принимаемых сигналов 5. При этом передающая антенна 2 и приемная антенна 4 структурно входят в приемопередающее устройство 3. Выход устройства усиления и преобразования принимаемых сигналов 5 связан со входом устройства первичной обработки сигналов 6, первый выход которого связан с входом устройства вторичной обработки информации 7. Второй выход устройства первичной обработки сигналов 6 связан с первым входом устройства отображения и связи с потребителем 8. Устройство вторичной обработки информации 7 соединено по первому выходу со вторым входом устройства отображения и связи с потребителем 8, а по второму выходу - с входом блока разбиения множества объектов на подмножества 9.1.1.
Устройство для расчета траекторных параметров групповых баллистических объектов 9 состоит из блока обработки РЛИ обзора 9.1 и блока межобзорной обработки РЛИ 9.2. Блок обработки РЛИ обзора 9.1 включает в свой состав 4 блока: блок сравнения 9.1.4, блок разбиения множества объектов на подмножества 9.1.1, блок ранжирования 9.1.2 и блок расчета геометрических центров подмножеств 9.1.3. Блок межобзорной обработки РЛИ 9.2 состоит из блока отождествления подмножеств 9.2.3, запоминающего устройства 9.2.4 и блока вычисления траекторных параметров 9.2.5.
Блок сравнения 9.1.4 соединен своим входом с третьим выходом устройства вторичной обработки информации 7, а выходом - со вторым входом блока ранжирования 9.1.2. Блок разбиения множества объектов на подмножества 9.1.1 по входу соединен со вторым выходом устройства вторичной обработки информации 7, а по выходу - с первым входом блока ранжирования 9.1.2. Блок ранжирования 9.1.2 первым выходом через вход 9.2.1 блока 9.2 соединен с входом блока отождествления подмножеств 9.2.3, а вторым выходом - со входом блока расчета геометрических центров подмножеств 9.1.3, который своим выходом через вход 9.2.2 блока 9.2 соединен со вторым входом ЗУ 9.2.4. Блок отождествления подмножеств 9.2.3 выходом соединен с первым входом ЗУ 9.2.4. Запоминающее устройство 9.2.4 выходом связано со входом блока вычисления траекторных параметров 9.2.5, выход которого связан с третьим входом устройства отображения и связи с потребителем 8.
Устройство отображения и связи с потребителем 8 и блок управления измерением параметров ГБО 11 входят в состав АРМ оператора 10. Вход-выход устройства отображения и связи с потребителем 8 связан с вход-выходом блока управления измерением параметров ГБО 11.
Система обработки радиолокационной информации работает следующим образом.
Устройство формирования зондирующих сигналов 1 формирует зондирующие сигналы, которые поступают на вход передающей антенны 2 и излучаются в воздушное пространство. Отраженные от ВКО сигналы принимаются приемной антенной 4 и передаются с ее выхода в устройство усиления и преобразования сигналов 5. Усиленные и преобразованные в цифровую форму отраженные сигналы передаются с выхода устройства усиления и преобразования сигналов 5 в устройство первичной обработки сигналов 6.
В блоке 6 производится первичная обработка сигналов, включая пороговую обработку, формирование радиолокационных отметок, определение сферических координат воздушно-космических объектов и пересчет их сферических координат в прямоугольные координаты. Все эти преобразования проводятся в цифровой форме. Начало координат используемой декартовой системы связано с центром Земли (имеется ввиду планета Земля). Указанные системы координат связаны известными соотношениями [5, с. 129-132]. С выхода 1 устройства первичной обработки сигналов 6 совокупность координат ВКО в цифровой форме передается на устройство вторичной обработки информации 7. С выхода 2 устройства первичной обработки сигналов 6 на вход 1 устройства отображения и связи с потребителем 8 АРМ оператора 10 подается информация о количестве N обнаруженных воздушно-космических объектов в текущем цикле обзора, а также информация об уровне шумов, сигналы, обеспечивающие контроль за обстановкой, сведения об исправности аппаратуры.
На основе сравнения прямоугольных координат i-x объектов Хi, Υi, Ζi и их радиальных скоростей в (k-1)-м и k-м обзорах в устройстве вторичной обработки информации 7 осуществляется преобразование поступающей координатной информации (текущих положений воздушно-космических объектов Χ, Υ, Ζ и их радиальных скоростей Vr) каждого i-го объекта в его траекторную информацию в виде шестимерного вектора, в состав которого входят наклонение орбиты i, долгота восходящего узла Ω, размер большой полуоси орбиты а, эксцентриситет е, угловое расстояние перигея ω и момент времени прохождения перигея τ [5, с. 127-132]. Кроме того в устройстве вторичной обработки информации 7 производится накопление декартовых координат обнаруженных ВКО в массиве Ψk (измеренных в прямоугольной системе координат с началом в центре Земли) за период k-го обзора

где k - номер обзора;  - координаты первого и второго ВКО в прямоугольной системе координат с началом в центре Земли;
- координаты первого и второго ВКО в прямоугольной системе координат с началом в центре Земли;  - координаты n-го ВКО в прямоугольной системе координат с началом в центре Земли.
- координаты n-го ВКО в прямоугольной системе координат с началом в центре Земли.
Траекторная информация с выхода 1 устройства вторичной обработки информации 7 поступает на вход 2 устройства отображения и связи с потребителем 8. А накопленный в k-м периоде обзора массив координат Ψk обнаруженных ВКО передается с 2-го выхода блока 7 в блок разбиения множества объектов на подмножества 9.1.1, входящий в состав устройства для расчета траекторных параметров ГБО 9.
В блоке разбиения множества объектов на подмножества 9.1.1 сначала рассчитываются расстояния rвн между каждой парой ВКО по формуле

где Хi, Yi, Zi и Xj, Yj, Zj - координаты i-го и j-го выбранных на данном этапе перебора ВКО, обнаруженных системой в текущем обзоре.
Затем с учетом определенного заранее экспериментальным путем радиуса внешнего шкалирования rвнеш рассчитываются значения функции принадлежности обнаруженных ai и aj воздушно-космических объектов по принципу близости к одному определенному подмножеству по формуле

в остальных случаях 
где μ(аi, aj) - значение функции принадлежности воздушно-космического объекта ai, тому же подмножеству, что и объект aj; rвн - расстояние между перебираемыми воздушно-космическими объектами ai и аj; Δ - систематическая ошибка определения координат, определяемая по результатам испытаний и зависящая от текущей обстановки (например, от воздействия активных и пассивных помех).
Затем в блоке 9.1.1 формируется матрица, состоящая из рассчитанных значений функции принадлежности μ(αi, αj) обнаруженных объектов к определенному подмножеству (см. фиг. 2). Для этого блок разбиения множества объектов на подмножества 9.1.1 выполнен в виде вычислителя матрицы. Вариант сформированной матрицы показан на фиг. 2.
Полученная матрица и связанный с ней массив координатных параметров обнаруженных ВКО Ψk передаются в цифровом виде на первый вход блока ранжирования 9.1.2.
С 3-го выхода устройства вторичной обработки информации 7 информация о текущей загруженности вычислителя блока 7 и текущей заполненности его оперативной памяти передается в блок сравнения 9.1.4. Блок сравнения 9.1.4 выполняет сравнение текущей загруженности вычислителя и текущей заполненности оперативной памяти устройства вторичной обработки информации 7 с установленными на этапе экспериментальных исследований границами интервалов (пороговыми значениями) и формирует значение порога β учета объектов при их группировании. По своей сути порог β учета объектов является уровнем значимости подмножества уровня на нечетком отношении отображения.
В блоке сравнения 9.1.4 содержится информация о значениях меньшей и большей границ смежных интервалов загруженности вычислителя блока 7. Каждому такому интервалу загруженности вычислителя соответствует определенное значение порога учета объекта при группировании. Попадая в блок 9.1.4, текущая величина загруженности вычислителя c1 блока 7 последовательно сравнивается с границами интервалов (градаций). При выполнении условия
сm < с1 ≤ сm+1, где сm и сm+1 - границы m-го интервала, из памяти (локального ЗУ) блока 9.1.4 извлекается значение порога учета объекта βв, соответствующее имеющей место загруженности вычислителя.
Аналогичным образом заполненность с2 оперативной памяти блока 7 последовательно сравнивается с границами dm и dm+1 m-x интервалов заполненности оперативной памяти блока 7 и при выполнении условия dm < с2 ≤ dm+1 для какого-либо m-го интервала из памяти блока сравнения 9.1.4 извлекается значение порога учета объекта βоп, соответствующее имеющей место заполненности оперативной памяти.
Процедуры захвата и сопровождения при традиционной обработке радиолокационной информации о ВКО являются наиболее трудоемкими процедурами. Известно, что при наличии в зоне обзора радиолокационной системы многоэлементной группы близкорасположенных объектов при традиционной обработке возникает необходимость в вычислении по данным захвата траекторий всех наблюдаемых в зоне захвата объектов. Для этого координаты всех обнаруженных на этапе захвате объектов запоминаются. После окончания последнего захвата (а их должно быть не менее четырех для устойчивости оценок вычисляемых параметров) через всю накопленную совокупность координат обнаруженных ВКО проводятся возможные гипотетические траектории, после чего организуется сопровождение объектов с наиболее правдоподобными траекториями [5, с. 77-78]. Чем большее число близких объектов находится в зоне обзора радиолокационной системы, тем более масштабные вычислительные ресурсы устройства вторичной обработки информации 7 (загруженность вычислителя и оперативная память) будут задействованы. С другой стороны, чем большее число близкорасположенных объектов находится в зоне обзора системы, тем меньший порог учета объектов необходимо иметь с целью недопущения перепутывания траекторий выделяемых подмножеств. Результаты вычислительных экспериментов показывают, что для блока сравнения 9.1.4 наиболее логичным и рациональным является использование порогов, жестко связанных с загруженностью вычислителя блока 7 и резерва его оперативной памяти. Количество порогов должно быть по возможности минимальным, но не снижающим чувствительности алгоритма блока сравнения 9.1.4 к плавающим значениям загруженности вычислителя и оперативной памяти устройства вторичной обработки информации 7.
Моделирование показало, что чувствительность алгоритма установления порога соответствует требуемой при использовании не менее 20 интервалов (градаций), соответствующих различным пороговым значениям загруженности вычислителя βΒ и наличия резерва оперативной памяти βоп. Один из вариантов назначения интервалов, соответствующих разным значениям порогов βв и βоп, приведен ниже в таблице.

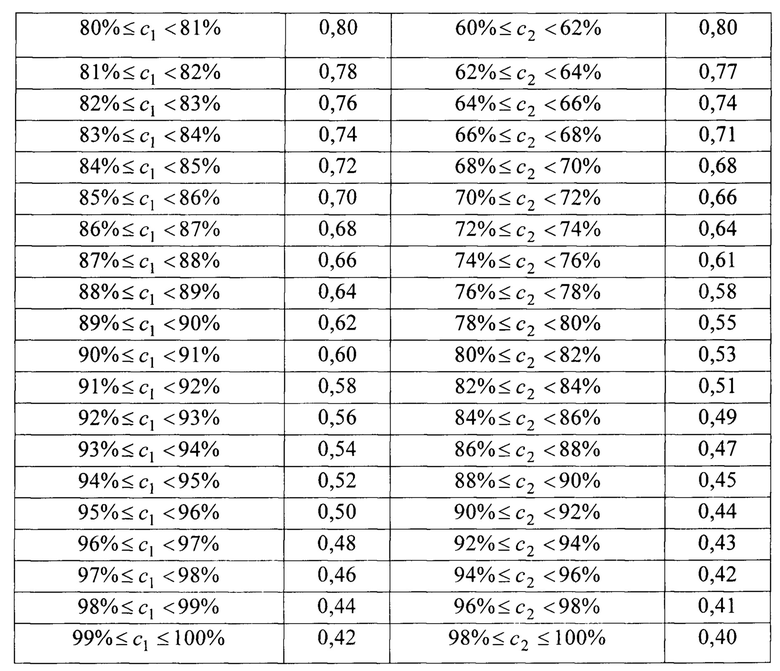
В качестве итоговой величины порога учета объекта β, поступающей с выхода блока 9.1.4 на 2-й вход блока ранжирования 9.1.2, используется меньшая из величин βв и βоп, то есть β=min(βв, βоп)
С одной стороны, значение порога пространственной обработки β должно стремиться к большим значениям для повышения информативности системы обработки об обнаруженных объектах, так как логичнее иметь информацию о траектории каждого обнаруженного объекта или хотя бы о малых подмножествах ВКО. Однако, с другой стороны, значение порога пространственной обработки β должно стремиться к наименьшему значению, так как в этом случае практически отсутствует опасность завязки ложных трасс.
Сформированное в блоке сравнения 9.1.4 значение порога β учета объекта при группировании передается с выхода блока сравнения 9.1.4 на 2-й вход блока ранжирования 9.1.2.
Итак, на первый вход блока ранжирования 9.1.2 из блока 9.1.1 поступает матрица, состоящая из рассчитанных значений функций принадлежности, и связанный с ней массив координатных параметров Ψk обнаруженных ВКО, а на второй вход - значение порога β с выхода блока сравнения 9.1.4. В блоке ранжирования реализована двухэтапная процедура расчета. На первом этапе находится булева матрица (процедура булевизации) значащих значений функций принадлежности μ(ai, aj) в соответствии со значением порога β учета объекта
при группировании. На втором этапе осуществляется ранжирование булевой матрицы принадлежности, полученной на первом этапе. При этом единичные значения присваиваются только тем функциям принадлежности, уровень значимости которых выше порога β. Функциям принадлежности, значения которых изначально были ниже установленного порога β, присваивается нулевое значение.
Указанные процессы преобразований удобнее рассмотреть на примере. Пусть на текущем цикле обзора обнаружено 4 ВКО. Пусть в соответствии с рассчитанными значениями функций принадлежности μ(αi, αj) на вход блока ранжирования 9.1.2 поступила матрица Μ размерностью 4×4
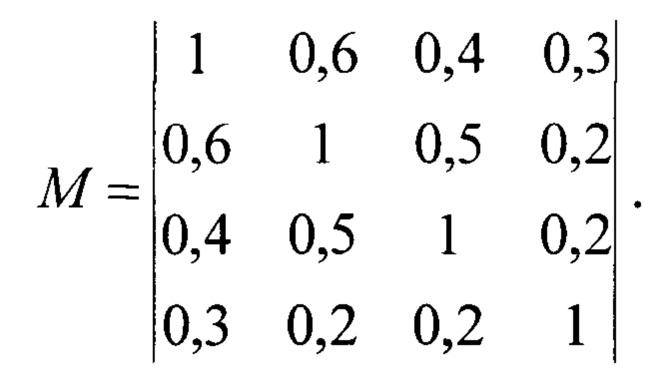
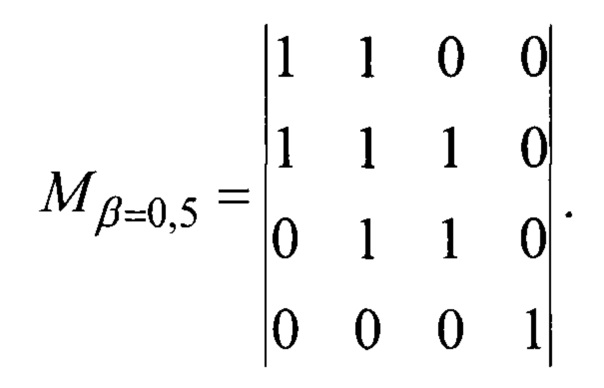
При значении порога β=0,5 матрица Μ преобразуется в булеву матрицу Μβ=0,5 вида
Для иллюстрации важности правильного выставления порога β покажем результат определения булевой матрицы при β=0,6.

Видно, что изменение порога приводит к изменению значащих элементов булевой матрицы, а это впоследствии приводит к неверному группированию объектов. Вот почему значение порога β предложено определять алгоритмически без участия интеллекта оператора.
На втором этапе осуществляется ранжирование булевой матрицы принадлежности, полученной на первом этапе. Обработка информации предполагает выделение эталонов, в наибольшей степени связанных с составляющими своих подмножеств. Количество элементов каждой предполагаемой группы ВКО принимается за число альтернатив выбора. А поскольку в конечном множестве с заданным транзитивным отношением имеется, по крайней мере, одна недоминируемая альтернатива, отношение порядка преобразуется в отношение строгого порядка.
С помощью полученной булевой матрицы алгоритмически устанавливается следующее: какие объекты могут быть в пространственном смысле объединены в одно подмножество; какой из объектов предполагаемого подмножества является наиболее связанным с составляющими подмножество другими объектами.
Практически это реализуется в блоке 9.1.2. В нем проводится ранжирование сформированной булевой матрицы в соответствии с приведенными ниже правилами. Сначала проводится поиск строк матрицы с максимальным количеством единиц и размещение этих строк выше остальных. Объекты, связанные с этими строками, как правило, и будут являться эталонами подмножеств, выделению которых посвящен алгоритм.
Осуществляется перебор строк матрицы сверху вниз и осуществляется определение эталона (объекта, в большей степени связанного с подмножеством и включающего в себя все признаки подмножества - близость объектов между собой), а затем и остальных элементов, входящих в то же подмножество, что и эталон. Отнесение объекта к тому же подмножеству, что и эталон, производится по следующему правилу. Осуществляется сравнение единиц в строках, принадлежащих классифицируемому объекту и эталону. Если в строке объекта содержатся единицы, входящие в строку эталона, то данный объект относят к тому же подмножеству, что и эталон. Если объект содержит комбинацию единиц, полный состав которой не содержится в каком-либо другом эталоне, то объект сам классифицируется как эталон.
Применим к матрице Мβ=0,5 указанное выше правило (см. фиг. 3). Номера объектов на фиг. 3 указаны в первом столбце таблиц. Объект №2 имеет максимальное число единиц в своей строке и должен классифицироваться как эталон. Стока объекта №1 находится ниже строки объекта №2. В ней две единицы. Сравнение строк ВКО №1 и предполагаемого эталона-ВКО №2 показывает, что комбинация единиц ВКО №1 (столбцы №1 и №2) является составной частью строки эталона-ВКО №2. При этом в строке ВКО №2 имеется еще одна единица в столбце №3, что характеризует эталон как объект наиболее связанный с объектами своего подмножества. Таким образом, ВКО №1 классифицируется как объект, входящий в то же подмножество, что и эталон-ВКО №2. Сравнение строк ВКО №3 и эталона-ВКО №2 показывает, что комбинация единиц строки ВКО №3 входит и строку эталона-ВКО №2 (столбцы №2 и №3). При этом в строке ВКО №2 имеется еще одна единица в столбце №1, что допустимо. Таким образом, ВКО №3 классифицируется как объект, входящий в то же подмножество, что и эталон-ВКО №2. Сравнение строк ВКО №4 и эталона-ВКО №2 показывает, что для ВКО №4 имеет место уникальная комбинация (единица в четвертом столбце, чего нет ни у одного из других объектов). Поэтому ВКО №4 также классифицируется эталоном.
Применение указанного правила к матрице Мβ=0,6 показывает совсем иной результат. Объекты №1 и №2 входят в одну группу (подмножество), причем каждый их них может быть признан эталоном. Объекты №3 и №4 не объединяются с другими объектами и являются эталонами, то есть входят в подмножества, включающие один объект.
Заметно, что при порогах β=0,5 и β=0,6 будет установлено разное количество подмножеств ВКО, что свидетельствует о необходимости своевременного и правильного определения порога β. Поэтому процедуру установления порога с учетом высокой вероятности проявления сложной многоцелевой обстановки следует поручать автоматическим устройствам, использующим программное обеспечение.
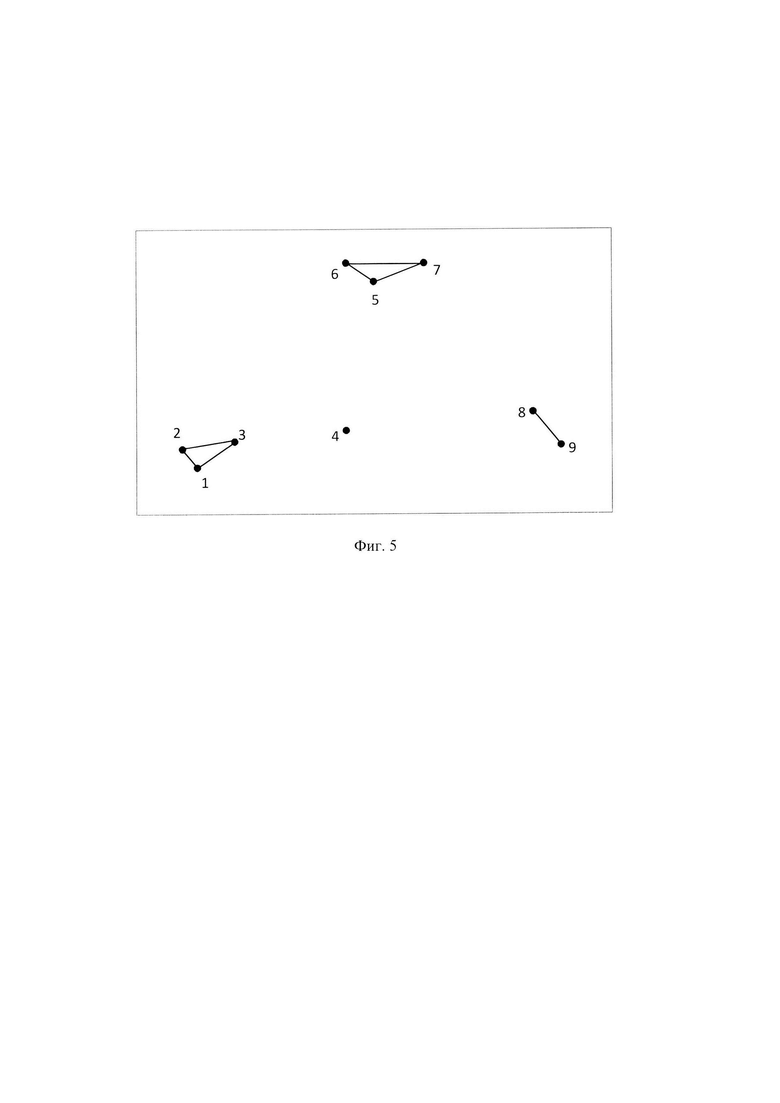
На фиг. 4 показан вариант результата проведения процедуры ранжирования в блоке 9.1.2 при обнаружении девяти объектов (ВКО), а на фиг. 5 - геометрическая интерпретация соответствующего взаимного пространственного расположения обнаруженных объектов.
В результате алгоритмического анализа матриц и соответствующего группирования (объединения в группы) объектов в блоке 9.1.2 создается массив данных Е, включающий сведения о номерах ВКО, вошедших в s-e группы (подмножества), и количестве S сформированных групп объектов.
С выхода 1 блока ранжирования 9.1.2 на вход блока отождествления подмножеств 9.2.3 через вход 9.2.1 блока 9.2 поступает ранжированная матрица, массив координатных параметров воздушно-космических объектов Ψk, связанный с указанной матрицей, массив данных Ε и текущее значение счетчика периодов обзора. С выхода 2 блока ранжирования 9.1.2 на вход блока расчета геометрических центров подмножеств 9.1.3 поступает массив Ε и массив координатных параметров воздушно-космических объектов Ψk.
Блок 9.1.3 расчета геометрических центров подмножеств выполнен в виде вычислителя геометрического центра подмножества воздушно-космических объектов по формулам



где Χi, Yi, Ζi, - координаты воздушно-космических объектов s-го подмножества в прямоугольной системе координат с началом в центре Земли; Xrus, Yrus, Zrus - координаты геометрического центра s-го подмножества; Ns - число воздушно-космических объектов, отнесенных к s-му подмножеству (группе).
В результате вычислений в данном блоке формируется массив В координатных параметров S выделенных подмножеств ВКО, который совместно со значениями счетчика периодов обзора передается в ЗУ 9.2.4.
В блоке отождествления подмножеств 9.2.3 осуществляется хранение информации, поступившей с блока ранжирования 9.1.2 на предыдущих обзорах и реализуется двухэтапная процедура вычислений. На первом этапе осуществляется расчет геометрических центров подмножеств в соответствии с формулами (3-5), а на втором этапе осуществляется отождествление выделенных на соседних обзорах подмножеств воздушно-космических объектов по правилу «ближайший сосед». Правило «ближайший сосед» реализовано простым перебором выделенных на разных обзорах i-х и j-x подмножеств и поиском среди них наиболее близких в соответствии с формулой

где Χгцi, Yгцi, Zгцi и Хгцj, Yгцj, Zгцj - координаты (в прямоугольной системе координат с началом в центре Земли) центров выделенных на разных обзорах подмножеств, перебираемых в интересах их отождествления.
На вход блока вычисления траекторных параметров 9.2.5 поступают накопленные в ЗУ 9.2.4 массив координат отождествленных на соседних обзорах (в соседних тактах) подмножеств и связанный с ними массив координат воздушно-космических объектов, значения счетчика периодов обзора, а также накопленные за 10 последних обзоров координаты центров выделенных подмножеств.
Для вычисления траекторных параметров в блоке 9.2.5 используется два набора координат местоположения Xгцk, Yгцk, Zгцk и Xгц(k+1), Yгц(k+1)j, Zгц(k+1) геометрических центров одного и того же подмножества ВКО на соседних k-м и (k+1)-м обзорах, то есть решается двухточечная задача определения траектории полета обнаруженных объектов [6, с. 83-109]. Методика, позволяющая по координатам двух местоположений вычислять траекторные параметры обнаруженного подмножества воздушно-космических объектов (i, Ω, а, е, ω, τ), является известной [7, с. 198-213].
Результаты расчетов блока вычисления траекторных параметров 9.2.5 в виде шестимерного массива U векторов, определяющих орбитальные параметры каждого подмножества (группы) обнаруженных воздушно-космических объектов (i, Ω, а, е, ω, τ), передаются в устройство отображения и связи с потребителем 8 АРМ оператора 10.
Оператор (лицо обслуживающего персонала) системы, используя информацию блока 8 о координатных параметрах объектов и центров групп объектов, с помощью имеющихся в АРМ 10 вычислительных средств осуществляет расчет точек старта и точек падения обнаруженных групп объектов или отдельных воздушно-космических объектов, оценивает обстановку и доводит ее до потребителей. Для расчета используются известные методы прогнозирования движения объектов, основанные на учете координат объектов в двух точках траектории, при которых расстояние до ВКО (группы ВКО) равно радиусу Земли [5, с. 133-141]. Кроме того, оператор, используя средства АРМ оператора 10, наблюдая за результатами отображения информации о траекторных параметрах, полученных путем выделения траекторий отдельных ВКО и траекторных параметрах выделенных групп ВКО, оценивает возможность (реализуемость) движения ВКО по полученным траекториям и принимает решение на передачу РЛИ потребителю с помощью соответствующих средств связи. Адекватность информации определяется исходя из оценки исправности аппаратуры, степени согласованности информации, поступающей с блоков 7 и 9, из получения невозможных, но завязанных аппаратурой системы траекторий, а также других объективных факторов, которые могут влиять на достоверность полученной РЛИ.
Устройство отображения и связи с потребителем 8 передает в блок управления измерением параметров ГБО 11 исходную информацию о текущей загруженности вычислителя и текущей оперативной памяти устройства вторичной обработки информации 7. В свою очередь, блок управления измерением параметров ГБО 11 передает на устройство отображения и связи с потребителем 8 информацию о работоспособности каналов синхронизации.
Предлагаемая система обработки радиолокационной информации апробирована с помощью стендовой модели и программно-алгоритмического обеспечения ее функционирования. При моделировании системы оценивалась вероятность образования ложных трасс. Результаты моделирования показали снижение вероятности образования ложных трасс не менее чем на 10-15%. Наибольший выигрыш может быть получен в условиях плотных потоков большого количества ВКО и ограниченных вычислительных возможностях аппаратуры обработки. Это объясняется известными достоинствами методов агрегирования, при которых сложная РЛИ представляется загрубленным образом меньшим количеством сгруппированных пространственно разнесенных ВКО.
Источники информации
1. Патент РФ №2648257 от 9.11.2016 г. МПК G01S 13/00. Система обработки радиолокационной информации. Семенов С.А., Поддубский В.В., Ляпоров В.Н и др. Заявка №2016143822 от 9.11.2016 г.(прототип).
2. Кузьмин С.З. Основы проектирования систем цифровой обработки радиолокационной информации. - М.: Радио и связь, 1986. - 352 с.
3. Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. - М.: Сов. радио, 1974. - 432 с.
4. Справочник по радиолокации. В 2-х книгах / под ред. Сколника М.И.; перевод с англ. под общей ред. д.т.н., проф. B.C. Вербы - М.: Техносфера, 2014. - 1352 с.
5. Саврасов Ю.С.Алгоритмы и программы в радиолокации. - М.: Радио и связь, 1985. - 216 с.
6. Саврасов Ю.С.Методы определения орбит космических объектов. - М.: Машиностроение, 1981. - 174 с.
7. Аппазов Р.Ф., Сытин О.Г. Методы проектирования траекторий носителей и спутников Земли. - М.: Наука. Гл. ред. физ.-мат.литературы, 1987. - 440 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система обработки радиолокационной информации | 2016 |
|
RU2648257C1 |
| Способ определения траектории маневрирующего воздушно-космического объекта | 2022 |
|
RU2818964C2 |
| СПОСОБ РАДИОЛОКАЦИОННОГО РАСПОЗНАВАНИЯ КЛАССОВ ВОЗДУШНО-КОСМИЧЕСКИХ ОБЪЕКТОВ ДЛЯ МНОГОДИАПАЗОННОГО РАЗНЕСЕННОГО РАДИОЛОКАЦИОННОГО КОМПЛЕКСА С ФАЗИРОВАННЫМИ АНТЕННЫМИ РЕШЕТКАМИ | 2020 |
|
RU2741057C1 |
| СПОСОБ КОМПЛЕКСНОГО ВЕДЕНИЯ РАДИОЛОКАЦИОННОЙ РАЗВЕДКИ СРЕДСТВАМИ АКТИВНОЙ, ПАССИВНОЙ И АКТИВНО-ПАССИВНОЙ ЛОКАЦИИ В ЕДИНОМ РАДИОЛОКАЦИОННОМ ПОЛЕ | 2024 |
|
RU2831131C1 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ВОЗДУШНО-КОСМИЧЕСКИХ ОБЪЕКТОВ В ДВУХДИАПАЗОННЫХ РАДИОЛОКАЦИОННЫХ КОМПЛЕКСАХ С АКТИВНЫМИ ФАЗИРОВАННЫМИ АНТЕННЫМИ РЕШЕТКАМИ (АФАР) | 2016 |
|
RU2665032C2 |
| КОМПЛЕКСНЫЙ ОБНАРУЖИТЕЛЬ КРИВОЛИНЕЙНЫХ ТРАЕКТОРИЙ ВОЗДУШНЫХ ОБЪЕКТОВ С ИСПОЛЬЗОВАНИЕМ ПАРАМЕТРИЧЕСКИХ ПРЕОБРАЗОВАНИЙ | 2021 |
|
RU2776417C1 |
| УСТРОЙСТВО РАДИОЛОКАЦИОННОГО РАСПОЗНАВАНИЯ ВОЗДУШНО-КОСМИЧЕСКИХ ОБЪЕКТОВ | 2014 |
|
RU2570111C1 |
| СПОСОБ ФОРМИРОВАНИЯ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ОБЪЕКТОВ | 2007 |
|
RU2347239C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЕКТОРА СКОРОСТИ ЛОКАЛЬНЫХ ОТРАЖАТЕЛЕЙ В КОСМИЧЕСКОМ РСА | 2017 |
|
RU2668570C1 |
| СПОСОБ ФОРМИРОВАНИЯ РАДИОЛОКАЦИОННЫХ ИЗОБРАЖЕНИЙ В РЛС С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ АНТЕННЫ С ПРЕДВАРИТЕЛЬНОЙ ФОКУСИРОВКОЙ И УСТРОЙСТВО ЕГО РЕАЛИЗУЮЩЕЕ | 2021 |
|
RU2792964C2 |


Изобретение относится к области радиолокации, а именно к системам обработки радиолокационной информации, и может быть использовано для измерения траекторных параметров отдельных элементов и сгустков элементов групповых баллистических объектов (ГБО). Техническим результатом изобретения является улучшение группирования обнаруженных объектов, связанных родственными траекторными признаками, и минимизация вероятности формирования ложных трасс ГБО. Заявленная система содержит устройство формирования зондирующих сигналов, устройство усиления и преобразования принимаемых сигналов, устройство первичной обработки сигналов, устройство вторичной обработки информации, приемопередающее устройство, автоматизированное рабочее место оператора, устройство для расчета траекторных параметров групповых баллистических объектов. При этом система дополнена блоком сравнения, вход которого соединен с устройством вторичной обработки информации, а выход - с блоком ранжирования, благодаря чему обеспечено алгоритмическое вычисление функции определения порога учета объектов при их группировании с учетом вычислительных ресурсов устройства вторичной обработки информации. 5 ил., 1 табл.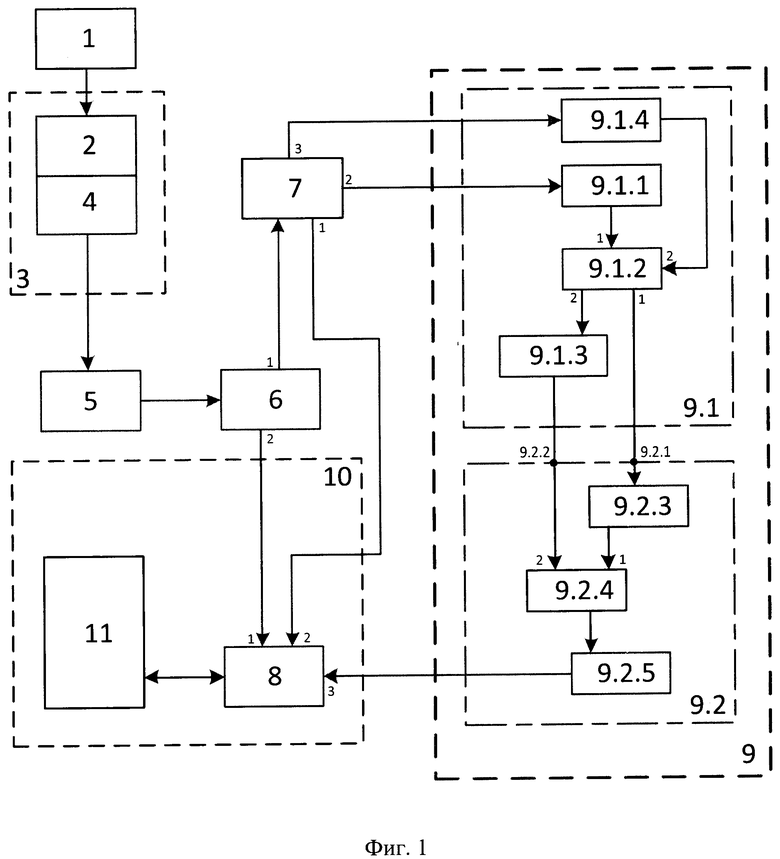
Система обработки радиолокационной информации, содержащая устройство формирования зондирующих сигналов, устройство усиления и преобразования принимаемых сигналов, устройство первичной обработки сигналов, устройство вторичной обработки информации, приемопередающее устройство, в состав которого входят передающая и приемная антенны, содержащая также автоматизированное рабочее место оператора, в состав которого входит устройство отображения и связи с потребителем и блок управления измерением параметров групповых баллистических объектов, содержащая также устройство для расчета траекторных параметров групповых баллистических объектов, состоящее из блока обработки радиолокационной информации обзора и блока межобзорной обработки радиолокационной информации, при этом блок обработки радиолокационной информации обзора включает блок разбиения множества объектов на подмножества, блок ранжирования и блок расчета геометрических центров подмножеств, а блок межобзорной обработки радиолокационной информации содержит блок отождествления подмножеств, запоминающее устройство и блок вычисления траекторных параметров, при этом выход устройства формирования зондирующих сигналов соединен с входом передающей антенны, выход приемной антенны соединен с входом устройства усиления и преобразования принимаемых сигналов, выход которого соединен с входом устройства первичной обработки сигналов, первый выход которого связан с входом устройства вторичной обработки информации, а второй выход - с первым входом устройства отображения и связи с потребителем, которое по вход-выходу связано с входом-выходом блока управления измерением параметров групповых баллистических объектов, причем устройство вторичной обработки информации соединено первым выходом со вторым входом устройства отображения и связи с потребителем, а вторым выходом - с входом блока разбиения множества объектов на подмножества, который по выходу связан с входом блока ранжирования, который первым выходом соединен с входом блока отождествления подмножеств, а вторым выходом - с входом блока расчета геометрических центров подмножеств, выход которого соединен со вторым входом запоминающего устройства, причем выход блока отождествления подмножеств выходом соединен с первым входом запоминающего устройства, выход которого связан с входом блока вычисления траекторных параметров, который связан своим выходом с третьим входом устройства отображения и связи с потребителем, отличающаяся тем, что в ее состав дополнительно вводят блок сравнения, размещенный в блоке обработки радиолокационной информации обзора, причем вход блока сравнения соединяют с третьим выходом устройства вторичной обработки информации, а выход подключают ко второму входу блока ранжирования.
| Система обработки радиолокационной информации | 2016 |
|
RU2648257C1 |
| СПОСОБ ОТОБРАЖЕНИЯ БАЛЛИСТИЧЕСКОГО СОСТОЯНИЯ ОРБИТАЛЬНОЙ ГРУППИРОВКИ КОСМИЧЕСКИХ АППАРАТОВ | 2011 |
|
RU2461016C1 |
| УСТРОЙСТВО РАДИОЛОКАЦИОННОГО РАСПОЗНАВАНИЯ ВОЗДУШНО-КОСМИЧЕСКИХ ОБЪЕКТОВ | 2014 |
|
RU2570111C1 |
| 0 |
|
SU200828A1 | |
| ЦИФРОВОЙ БЛОК ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 1999 |
|
RU2166771C1 |
| JP 2006258555 A, 28.09.2006 | |||
| CN 108089184 A, 29.05.2018. | |||

