АННОТАЦИЯ
Способ определения траектории маневрирующего воздушно-космического объекта (ВКО). Заявляемый способ позволяет на основе анализа результатов измерения участка трассы маневрирующего ВКО определить его истинную траекторию среди множества возможных и таким образом осуществить долгосрочный прогноз его положения в пространстве. При этом определение траектории ВКО осуществляется в условиях внешних помех и с учетом погрешности измерений. Изобретение относится к радиолокации, в частности к способам определения параметров положения цели радиолокационными следящими системами.
ОПИСАНИЕ
Область техники
Изобретение относится к радиолокации и может быть использовано при определения траектории маневрирующего ВКО. Достигаемый технический результат: повышение достоверности, точности и устойчивости сопровождения ВКО.
Предпосылки к созданию изобретения
Предпосылки к созданию изобретения, с одной стороны: беспрецедентный рост количества и видов ВКО (ракеты, самолеты, беспилотные летательные аппараты, низкоорбитальные спутники); энергичное увеличение скоростей ВКО; развитие методов радиоэлектронной борьбы (РЭБ) и, как следствие, наличие электромагнитных помех в воздушно-космическом пространстве, с другой стороны: значимый рост производительности микроэлектронных процессоров.
Аналогичные способы отслеживания трассы ВКО
Из существующего уровня техники известен способ отслеживания трассы ВКО, приведенный в патенте RU 2624467 С2 «Способ определения высоты цели двухкоординатной РЛС». Это изобретение относится к радиолокации, в частности к способам определения параметров положения цели при прямолинейном равномерном движения в окрестности радиолокационной станции (РЛС), и может быть использовано для получения дополнительных данных по перемещению объектов в пространстве, в том числе высоты, при использовании двухкоординатных РЛС, осуществляющих круговой или секторный обзор пространства. Технический результат - расширение функциональных возможностей существующих двухкоординатных РЛС. Указанный результат достигается за счет того, что в двухкоординатную РЛС между блоком вторичной обработки информации и блоком индикации информации вводят блок постобработки данных траектории цели, состоящий из вычислителя, вычитателя и компаратора, на вход блока постобработки данных траектории цели из блока вторичной обработки информации поступают отфильтрованные замеры положения цели, из которых отбирают три последовательных замера, обрабатывают их в вычислителе, выбирают и сохраняют в вычитателе одно достоверное значение предполагаемой высоты цели при прямолинейной траектории, затем в случае проведения первой итерации переходят на обработку в вычислителе следующих замеров положения цели, а при проведении второй и последующих итераций в вычитателе определяют отклонение вновь полученной предполагаемой высоты от ранее вычисленной, в компараторе фиксируют отклонение, проводят оценку правильности гипотезы прямолинейности и равномерности, принимают вычисленное значение высоты, которое передают в блок индикации информации и далее переходят на обработку следующих замеров, поступивших в блок постобработки данных траектории цели.
Недостатками данного технического решения являются: ограничение на вид траектории ВКО (равномерное прямолинейное движение) и отсутствие учета внешних помех.
Также известен «Способ сопровождения траектории излучающей или подсвечиваемой внешним радиоэлектронным средством цели», защищенный патентом RU 2667898 С1 (01.2006).
Изобретения относятся к области радиолокации МПК G01S 13/66 и могут быть использованы в радиолокационных станциях (РЛС). Достигаемый технический результат - сокращение времени использования активного режима РЛС, оснащенной пеленгаторами, при независимом сопровождении ими траектории излучающей или подсвечиваемой внешним радиоэлектронным средством цели и исключение ложных целей. Указанный результат достигается за счет того, что способ сопровождения траектории цели основан на пеленгации ее по излучениям или отражениям с помощью нескольких (n>2) разнесенных в пространстве пеленгаторов и на вычислении дальности до цели. При этом при обзоре пространства с помощью активной радиолокационной станции (РЛС) в активном режиме, на основании данных о пеленгах, переданных в РЛС от нескольких пеленгаторов, осуществляющих независимое сопровождение пеленгов целей, устраняют точки пересечения пеленгов, соответствующие ложным целям, на основании переданных данных о пеленгах реальных целей формируют графики изменения пеленга из точек расположения пеленгаторов, путем экстраполяции определяют значения пеленгов для различных моментов времени, на их основе вычисляют дальности до цели, ведут сопровождение в пассивном режиме по пеленгам и дальности траектории, эпизодически уточняя ее положение в активном режиме, кроме того, уточняют положение траектории при изменении параметров излучения цели или при перерыве в излучении.
Недостатком данного технического решения является отсутствие учета внешних помех.
Прототип изобретения
Прототипом изобретения может считаться патент RU 2716495 «Способ и система многоцелевого сопровождения в двухпозиционных радиолокационных системах» (27.12.2018). Изобретение относится к радиолокации (МПК G01S 13/72) и может быть использовано при разработке перспективных многопозиционных радиолокационных систем и их модернизации. Достигаемый технический результат - повышение достоверности и точности отождествления воздушных объектов в режиме сопровождения. Сущность способа состоит в том, что для каждого приходящего измерения от всех воздушных объектов с любой информационной позиции формируются косвенные измерения на ведущей (первой) позиции, на основе которых для каждой отслеживаемой траектории проверяется выполнение определенных условий для полученных координат воздушного объекта (попадание в строб отождествления) Для той траектории, для которой данные условия выполняются, производится коррекция прогноза, при этом сам прогноз (экстраполяция) осуществляется по соответствующим правилам.
Недостатком данного технического решения является отсутствие учета внешних помех.
Сущность изобретения
Сущность предлагаемого способа определения траектории маневрирующего воздушно-космического объекта (ВКО) заключается в следующем.
Выдвигается априори множество реальных гипотез W{Fi(x,y,z,t),F2(x,y,z,t),…Fi(x,y,z,t),…Fn(x,y,z,t),} о возможных траекториях отслеживаемого ВКО. Плотность реальных гипотез - минимальное расстояние между соседними гипотетическими траекториями - должно быть сопоставимо с радиусом достоверного поражения ВКО. Здесь реальная гипотеза понимается в том смысле, что эволюции маневрирующего ВКО не могут привести к его разрушению из-за механических перегрузок.
В процессе отслеживания ВКО при помощи стационарной или подвижной радиолокационной системы измеряется отрезок его траектории Fm(x,y,z,t) с аддитивной помехой Hm(х,у,z,t) и погрешностью измерения Qm(х,у,z,t) и при помощи аналого-цифрового преобразователя создается выборка среднего объема - от 70 до 100 значений

Для каждой гипотезы рассчитывается выборка разностей между точками траектории и соответствующими точками гипотезы:
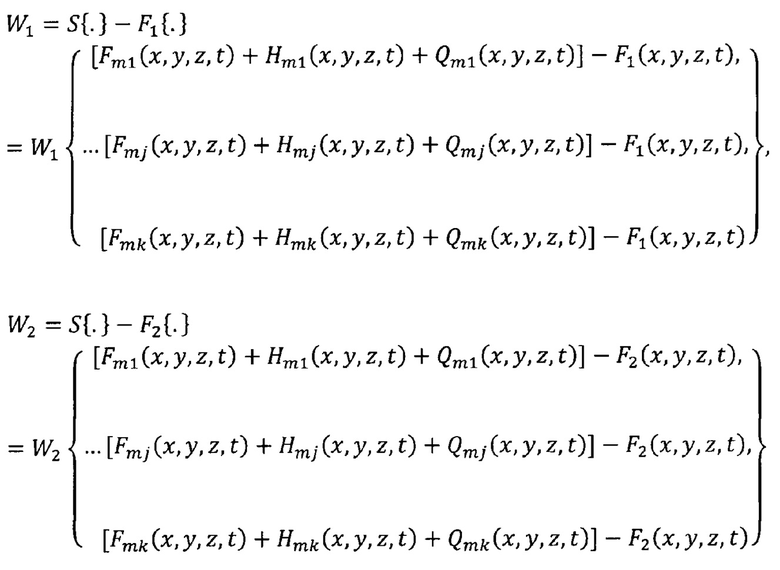

Для каждой гипотезы по выборке разностей на основании известных формул вычисляются значения стандартных отклонений σ1(W1), σ2(W2),…σi(Wi),…σn(Wn) по осям координат (x, y, z).
При этом измерение радиолокационными следящими системами участка трассы ВКО производится на длине, сопоставимой с периодом первой гармоники траектории маневрирующего объекта по любой из осей координат; на мощность аддитивных внешних помех и дисперсию погрешностей измерения не накладываются дополнительные ограничения, а точность способа постоянно контролируется путем отслеживания одной или нескольких известных траекторий космических объектов.
Истинная гипотеза Ftrue(х,у,z,t) определяется по критерию: min{σ1(W1), σ2(W2),…σi(Wi),…σn(Wn)} для каждой из осей координат (x,y,z).
Положение сопровождаемого объекта в произвольный будущий момент времени Т вычисляется по формуле
Ftrue[x(T,)y(T),z(T)].
Ниже, в качестве примера приведены результаты определения проекции траектории ВКО на ось X для пяти гипотез маневрирования: Sinx; Sin0,75x; Sin1,25x; Sin(x+π/4); Sin(x-π/4). Компьютерное моделирование осуществлено при помощи электронного табличного процессора Microsoft Excel.
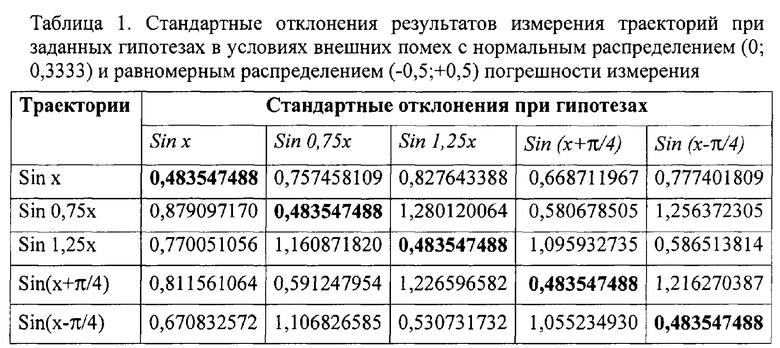
Из таблицы видно, что стандартные отклонения разностей минимальны тогда и только тогда, когда гипотеза соответствует траектории ВКО.
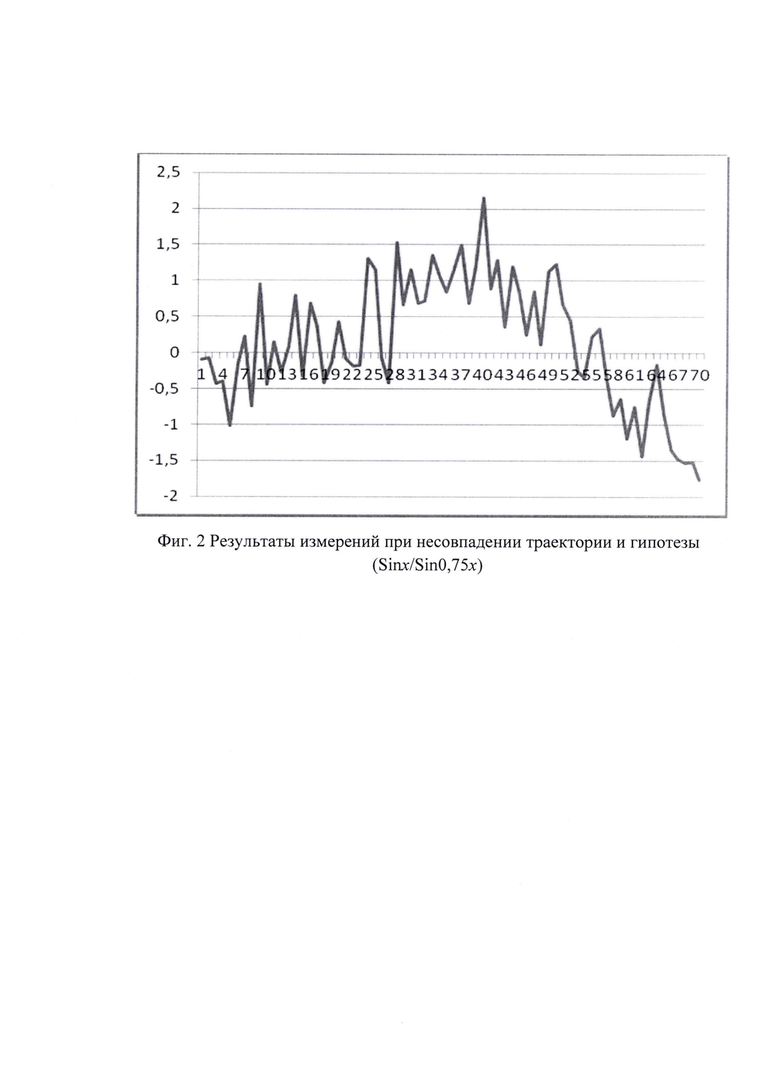
Графики, построенные по выборкам разностей измеренных и гипотетических значений, приведены на фигурах 1-5.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ сопровождения траектории излучающей или подсвечиваемой внешним радиоэлектронным средством цели (варианты) и радиолокационный комплекс для его осуществления (варианты) | 2017 |
|
RU2663226C1 |
| Способ сопровождения траектории цели в активно-пассивной радиолокационной системе | 2021 |
|
RU2769566C2 |
| Способ сопровождения траектории излучающей или подсвечиваемой внешним радиоэлектронным средством цели | 2017 |
|
RU2667898C1 |
| СПОСОБ ПОЛУЧЕНИЯ РАДИОТЕХНИЧЕСКОЙ ИНФОРМАЦИИ И РАДИОТЕХНИЧЕСКИЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2562616C1 |
| СПОСОБ КОМПЛЕКСНОГО ВЕДЕНИЯ РАДИОЛОКАЦИОННОЙ РАЗВЕДКИ СРЕДСТВАМИ АКТИВНОЙ, ПАССИВНОЙ И АКТИВНО-ПАССИВНОЙ ЛОКАЦИИ В ЕДИНОМ РАДИОЛОКАЦИОННОМ ПОЛЕ | 2024 |
|
RU2831131C1 |
| СПОСОБ КОМБИНИРОВАННОГО НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2586399C2 |
| Способ и система многоцелевого сопровождения в двухпозиционных радиолокационных системах | 2018 |
|
RU2716495C1 |
| СПОСОБ ТРАССОВОГО СОПРОВОЖДЕНИЯ ВОЗДУШНЫХ МАНЕВРИРУЮЩИХ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ ПО ПЕЛЕНГОВОЙ ИНФОРМАЦИИ ОТ ОДНОПОЗИЦИОННОЙ СИСТЕМЫ РАДИОТЕХНИЧЕСКОЙ РАЗВЕДКИ ВОЗДУШНОГО БАЗИРОВАНИЯ | 2017 |
|
RU2660498C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ МАНЕВРИРУЮЩЕЙ ВОЗДУШНОЙ ЦЕЛИ | 1993 |
|
RU2048684C1 |
| СПОСОБ БОНДАРЕНКО А.В. ПОЛУЧЕНИЯ РАДИОТЕХНИЧЕСКОЙ ИНФОРМАЦИИ И РАДИОТЕХНИЧЕСКИЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2599259C1 |




Изобретение относится к радиолокации, в частности к способам определения параметров положения цели радиолокационными следящими системами. Техническим результатом является обеспечение возможности определения истинной траектории маневрирующего воздушно-космического объекта (ВКО) среди множества возможных на основе анализа результатов измерения участка его трассы и, таким образом, осуществления долгосрочного прогноза его положения в пространстве. При этом определение траектории ВКО осуществляется в условиях внешних помех и с учетом погрешности измерений. Заявленный способ заключается в том, что выдвигается априори множество реальных гипотез о возможных траекториях отслеживаемого ВКО, которые не могут привести к его разрушению из-за механических перегрузок. Плотность реальных гипотез - минимальное расстояние между соседними гипотетическими траекториями - должно быть сопоставимо с радиусом достоверного поражения ВКО. Для каждой гипотезы вычисляются значения стандартных отклонений. При этом измерение радиолокационными следящими системами участка трассы ВКО производится на длине, сопоставимой с периодом первой гармоники траектории маневрирующего объекта по любой из осей координат. По критерию минимального стандартного отклонения определяется истинная гипотеза, на основе которой определяют положение сопровождаемого объекта в произвольный будущий момент времени. 5 ил.
Способ определения траектории маневрирующего воздушно-космического объекта (ВКО), предусматривающий выполнение следующих операций:
выдвигают априори конечное множество реальных гипотез о всей возможной траектории ВКО, описываемой гармонической синусоидальной функцией по любой из осей координат, причем реальные гипотезы о возможных траекториях ВКО выдвигаются с учетом того, что эволюции маневрирующего ВКО не могут привести к его разрушению из-за механических перегрузок, а плотность реальных гипотез, представляющая собой минимальное расстояние между соседними гипотетическими траекториями, сопоставима с радиусом достоверного поражения ВКО;
измеряют радиолокационными следящими системами короткий участок траектории ВКО в 70-и - 100-а точках в равноотстоящих моментах времени, при этом измерение радиолокационными следящими системами участка трассы ВКО производится на длине, сопоставимой с периодом первой гармоники траектории маневрирующего судна по любой из осей координат;
вычисляют разности между результатами измерения и каждой из гипотез в соответствующие моменты времени;
вычисляют значения стандартных отклонений по осям координат в выборках разностей между результатами измерения и каждой из гипотез в соответствующие моменты времени;
определяют истинную гипотезу Ftrue(х,у,z,t) по критерию минимума стандартного отклонения для каждой из осей координат;
определяют траекторию маневрирующего ВКО в произвольный будущий момент времени T по формуле Ftrue[x(T),y(T),z(T)].
| Способ и система многоцелевого сопровождения в двухпозиционных радиолокационных системах | 2018 |
|
RU2716495C1 |
| СПОСОБ И СИСТЕМА ИДЕНТИФИКАЦИИ ИЗМЕРЕНИЙ В МНОГОДИАПАЗОННЫХ РЛС | 2014 |
|
RU2574075C1 |
| СПОСОБ ОЦЕНКИ ПАРАМЕТРОВ ТРАЕКТОРИИ ОБЪЕКТА | 2016 |
|
RU2610831C1 |
| Способ сопровождения траекторий радиолокационных целей и устройство для его осуществления | 2016 |
|
RU2630252C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОРБИТЫ КОСМИЧЕСКОГО АППАРАТА | 1999 |
|
RU2150414C1 |
| БОГАЧЕВ А.С., МЕРКУЛОВ В.И., ЧЕРНОВ В.С., ГУСАРОВ С.Б | |||
| Математические модели относительного движения воздушных объектов в процедурах наблюдения в авиационных бортовых РЛС | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Математические модели в | |||

