Настоящая патентная заявка испрашивает приоритет по европейской патентной заявке №17210094.3, поданной 22.12.2017, полное раскрытие которой включено в настоящий документ путем ссылки.
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к системе противовращения для вертолета.
УРОВЕНЬ ТЕХНИКИ
Вертолеты в своей основе включают известным образом фюзеляж, несущий винт, расположенный на верхнем участке фюзеляжа и вращаемый вокруг первой оси, и рулевой винт, расположенный на хвостовом конце вертолета и вращающийся вокруг второй оси, поперечной к первой оси.
Несущий винт имеет функцию создания подъемной силы, необходимой для поддержки вертолета, для обеспечения возможности изменения высоты вертолета и для обеспечения возможности движения вперед/назад и в боковом направлении вертолета.
Как известно, несущий винт оказывает первый крутящий момент в первом направлении на фюзеляж вертолета. Этот первый крутящий момент может привести к вращению фюзеляжа в первом направлении.
Рулевой винт установлен для создания второго крутящего момента на фюзеляже в том же или ином направлении, что и первый крутящий момент, чтобы контролировать угол рыскания вертолета.
Таким образом, рулевой винт предотвращает нежелательное вращение вертолета и позволяет управлять углом рыскания, а именно углом поворота, определенным относительно вертикальной оси, проходящей через центр тяжести вертолета, со ссылкой на условия полета при зависании вертолета.
Рулевой винт содержит известным образом втулку, вращающуюся вокруг соответствующей оси, и группу лопастей, выступающих консольно от втулки.
В традиционных решениях вертолет включает:
- один или несколько двигателей внутреннего сгорания (например, турбинные двигатели);
- главный блок передачи, который расположен между турбинами и несущим винтом; и
- вторичный блок передачи, который приводится в действие главным блоком передачи и передает привод на втулку и лопасти рулевого винта.
В традиционном решении вертолет дополнительно включает ребро, выступающее от задней части хвостовой балки, и хвостовую плоскость, выступающую консольно с обеих сторон ребра.
Хвостовая балка является элементом конструкции, который выдерживает нагрузки, создаваемые винтом, препятствующим вращению, и, кроме того, сдвиг напряжения и изгибающий момент, создаваемый хвостовой плоскостью и ребром.
Рулевой винт, препятствующий вращению, обычно выступает с боковой стороны ребра. Соответственно, блок вторичной передачи проходит через хвостовую балку и ребро.
Ребро позволяет дополнительно контролировать рыскание вертолета, особенно в прямом полете. Этот дополнительный контроль рыскания полезен в случае поломки несущего винта и позволяет пилоту смягчить встречное вращение фюзеляжа во время аварийной посадки.
При расположении на верхнем конце ребра хвостовая плоскость лишь незначительно сталкивается с следом от несущего винта. Соответственно, создание шума и вибраций уменьшается с особым акцентом на переход от зависания к полету вперед.
Однако конструкция ребра ограничена тем фактом, что ребро вмещает часть вторичной передачи.
Вследствие этого в вышеописанном решении скорость вращения втулки и лопастей хвостового винта неизбежно связана со скоростью вращения несущего винта, что приводит к неоптимальному использованию системы противовращения.
Лопасти шарнирно прикреплены к втулке рулевого винта так, что можно изменять угол наклона.
Таким образом, можно контролировать тягу, создаваемую рулевым винтом и, следовательно, угол рыскания вертолета независимо от подъемной силы, создаваемой несущим винтом. Этот же механизм также позволяет модулировать тягу хвостового винта в зависимости от условий полета, например, максимизируя его при зависании и сводя к минимуму его при высокоскоростном поступательном полете, условие, при котором функция противовращения в значительной степени выполняется аэродинамическими силами.
В последнее время было предложено использовать электрические двигатели для привода рулевого винта.
Например, патент EP-B-2631174 описывает использование электрического двигателя для привода рулевого винта, чтобы иметь возможность изменять угловую скорость втулки и угол наклона лопастей независимо друг от друга и независимо от скорости вращения несущего винта.
EP-A-3254962 раскрывает вертолет с фюзеляжем, хвостовой балкой и матрицей противовращения, расположенной на противоположной стороне хвостовой балки относительно фюзеляжа.
Матрица противовращения содержит группу независимо приводимых в действие вторых винтов.
Кроме того, вертолет, раскрытый в EP-A-3254962, включает пару боковых стабилизаторов, которые выступают в боковом направлении от хвостовой балки.
Эти боковые стабилизаторы увеличивают поперечное сечение и вес вертолета. Кроме того, из-за их положения на стабилизаторы воздействует след, создаваемый несущим винтом. Это факт, который может привести к вибрации и шуму или - если стабилизаторы вытянуты - к дальнейшему увеличению поперечного сечения и веса вертолета.
В этой компоновке матрица противовращения не подвергается изгибающему моменту и напряжению сдвига, вызванному стабилизаторами.
Другими словами, матрица противовращения подвергается только нагрузкам, создаваемым самой собой, и, по существу, определяет только защиту винтов.
EP-A-3254962 также раскрывает электрическую распределительную систему для системы противовращения, содержащую:
- два или более генератора, соединенных с главной коробкой передач;
- первую и вторую группу двигателей с регулируемой скоростью, соединенных с двумя или более генераторами; и
- по меньшей мере один первый и один второй компьютер управления рысканием, независимо подключенный к каждому из первой и второй группы двигателей с регулируемой скоростью, при этом каждый из первого и второго компьютеров управления рысканием служит в качестве основного и резервного компьютера управления рысканием для установки управления избыточностью как для первой, так и для второй группы двигателей с регулируемой скоростью.
В отрасли осознается необходимость обеспечения определенного уровня избыточности в системе противовращения, без ущерба для возможности управления желаемым углом рыскания вертолета в каждом рабочем условии, одновременно улучшая общую аэродинамическую конструкцию хвоста и, следовательно, общую аэродинамическую эффективность вертолета.
В отрасли осознается необходимость обеспечения определенного уровня избыточности в системе противовращения, без ущерба для возможности управления желаемым углом рыскания вертолета в каждом рабочем условии, при этом уменьшая, насколько это возможно, одновременно поперечное сечение - и, следовательно, общее сопротивление - и вес вертолета.
В промышленности также осознают необходимость уменьшения общего веса системы противовращения для обеспечения одинаковых возможностей управления в отношении угла рыскания, нагрузки на диск и максимальной скорости вращения лопасти, одновременно уменьшая, насколько это возможно, одновременно поперечное сечение и вес вертолета.
Кроме того, в промышленности также осознают необходимость регулировки и управления углом рыскания, упрощая конструктивное решение рулевых винтов известных типов, одновременно уменьшая, насколько это возможно, поперечное сечение и вес вертолета.
Наконец, в промышленности существует необходимость обеспечения определенного уровня избыточности в системе противовращения при сохранении структурной функции хвостовой балки.
В US-B-9,296,477 описан многовинтовой вертолет.
В CA-2794077 и EP-A-2821344 описан электрический рулевой винт.
РАСКРЫТИЕ ИЗОБРЕНИЯ
Задачей настоящего изобретения является создание вертолета, который позволяет удовлетворять по меньшей мере одну из вышеупомянутых необходимостей, связанных с известными типами рулевых винтов.
Вышеупомянутая задача решается с помощью настоящего изобретения в той степени, насколько оно относится к вертолету по п.1.
Настоящее изобретение также относится к вертолету по п.20.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Для лучшего понимания настоящего изобретения в дальнейшем описаны два предпочтительных варианта выполнения исключительно в качестве неограничивающего примера и со ссылкой на сопровождающие чертежи, на которых:
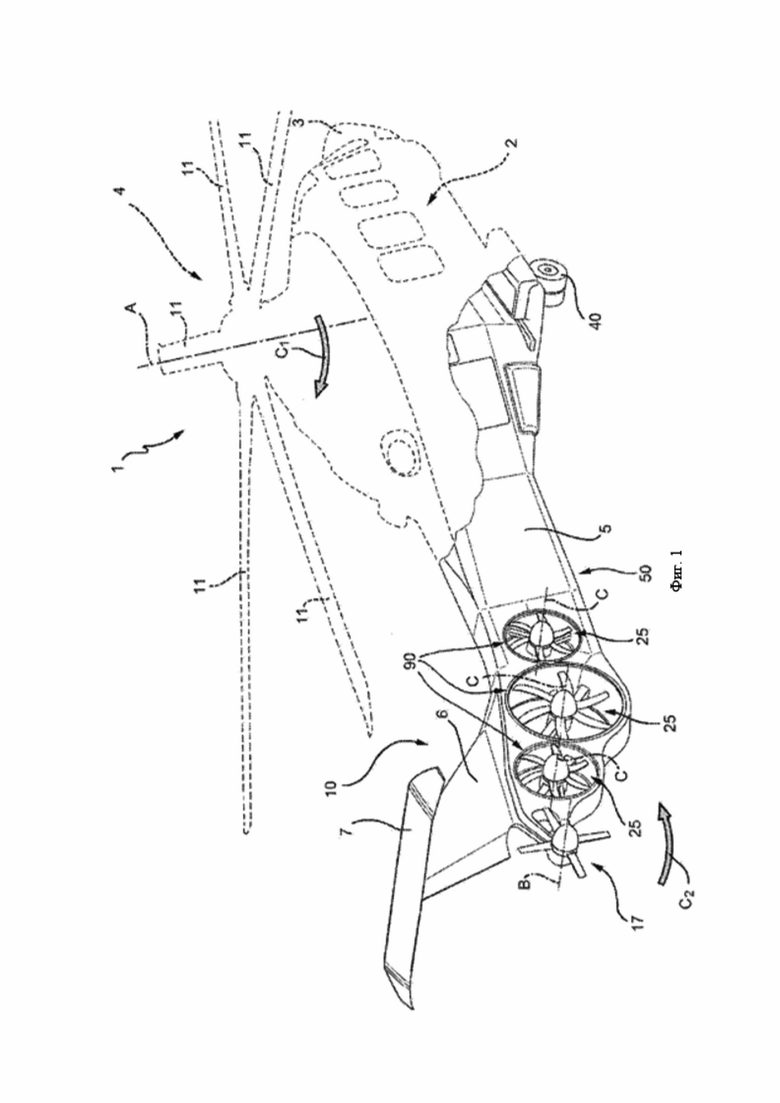
Фигура 1 представляет собой вид в перспективе вертолета, оснащенного первым вариантом выполнения системы противовращения в соответствии с настоящим изобретением;
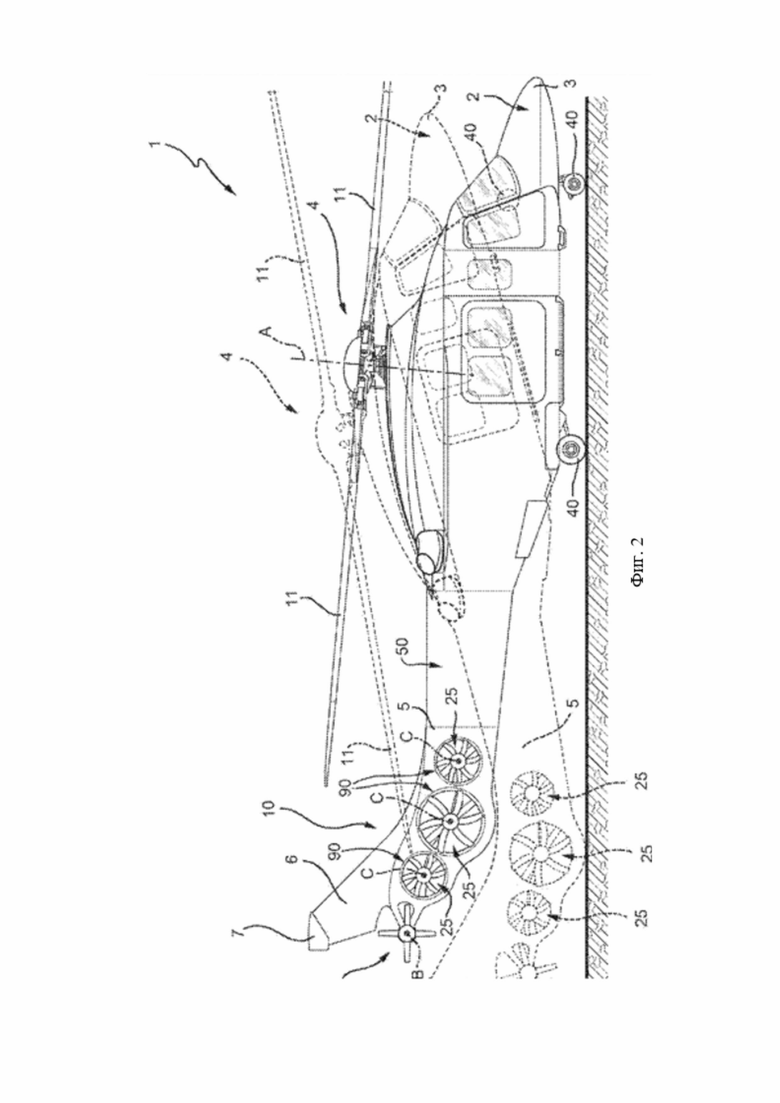
- Фигура 2 представляет собой вид сбоку вертолета на Фигуре 1 во время маневра посадки;
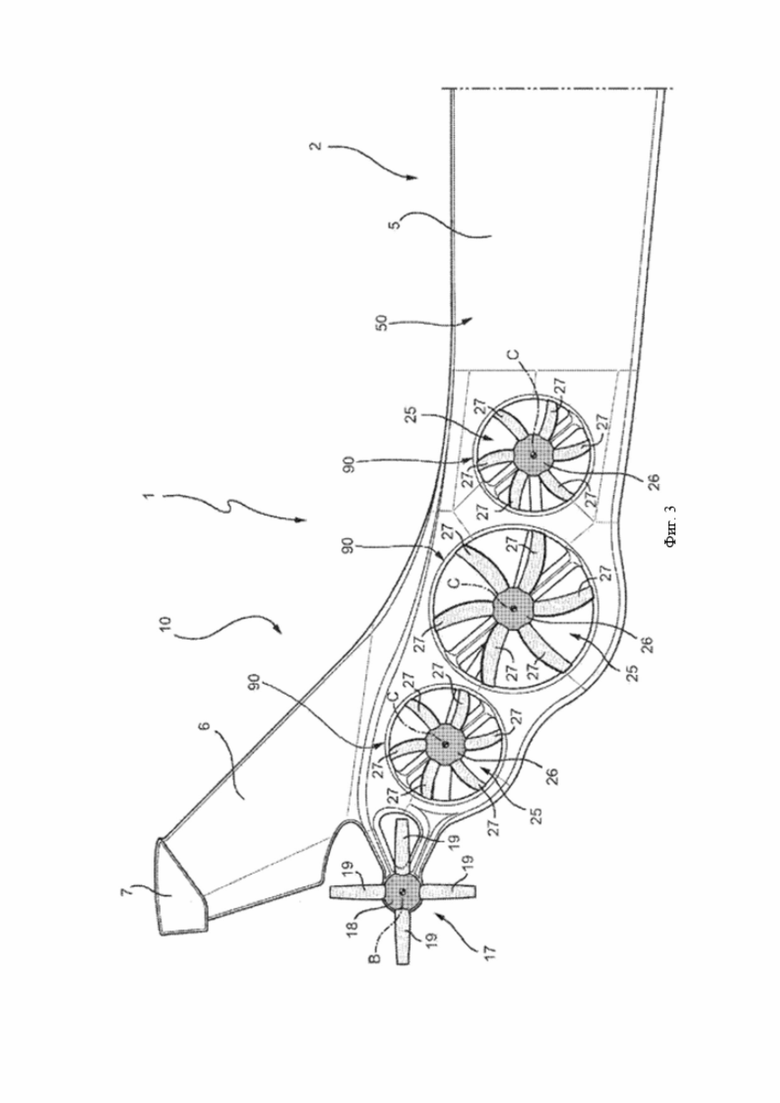
- Фигура 3 показывает увеличенный вид хвостового участка вертолета с системой противовращения на Фигурах 1 и 2;
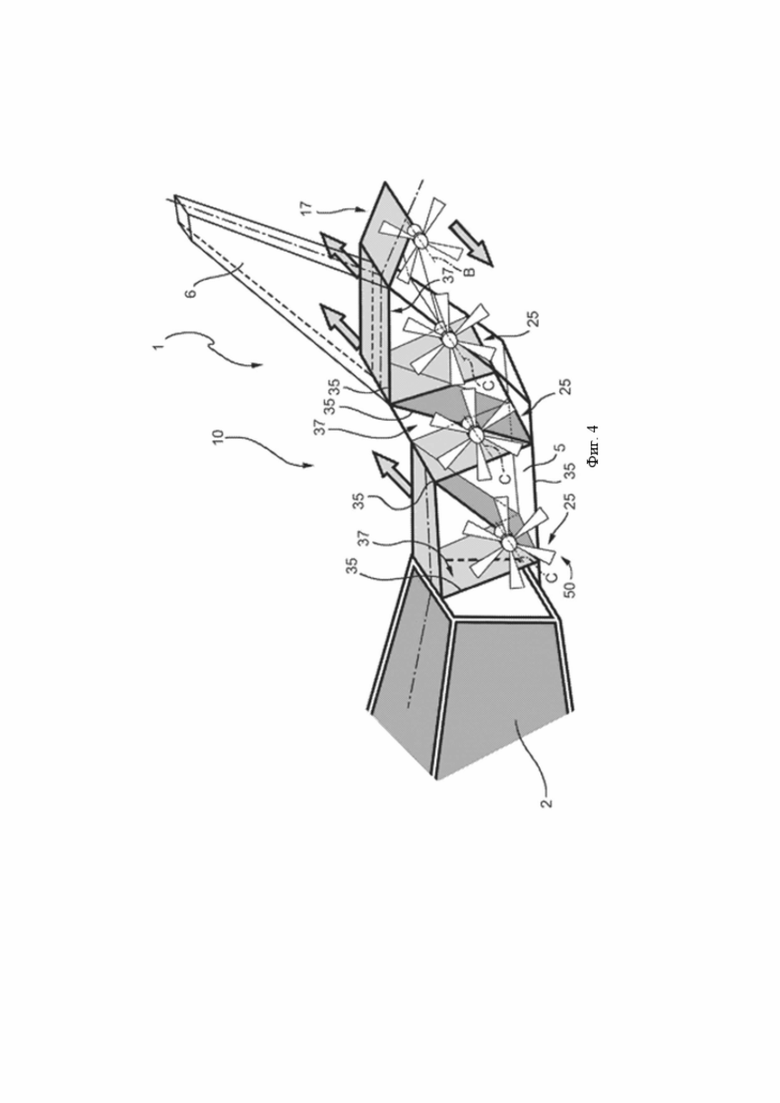
- Фигура 4 показывает увеличенный вид системы противовращения на Фигуре 3 с частями, удаленными для ясности;
- Фигура 5 показывает вертолет на Фигурах 1 и 2 с частями, удаленными для ясности;
- Фигура 6 представляет собой диаграмму, которая иллюстрирует работу системы противовращения в соответствии с изобретением в различных рабочих условиях вертолета на Фигурах 1-5 и сравнивает ее с функционированием системы противовращения известного типа, обеспечивающей такую же мощность;
- Фигура 7 сравнивает пространство, занимаемое системой противовращения в соответствии с настоящим изобретением, с пространством системы противовращения известного типа, способной обеспечивать такое же сцепление;
Фигура 8 представляет собой вид в перспективе вертолета, оснащенного первым вариантом выполнения системы противовращения в соответствии с настоящим изобретением;
- Фигура 9 представляет собой схематический вид первого варианта выполнения движительной установки для системы противовращения, показанной на Фигуре 1-8;
- Фигура 10 представляет собой схематический вид потока мощности в первом варианте выполнения движительной установки, показанной на Фигуре 9;
- Фигура 11 представляет собой схематичный вид второго варианта выполнения движительной установки для системы противовращения, показанной на Фигуре 1-8;
- Фигура 12 представляет собой схематический вид потока мощности во втором варианте выполнения движительной установки, показанной на Фигуре 11;
- Фигура 13 представляет собой схематичный вид третьего варианта выполнения движительной установки для системы противовращения, показанной на Фигуре 1-8;
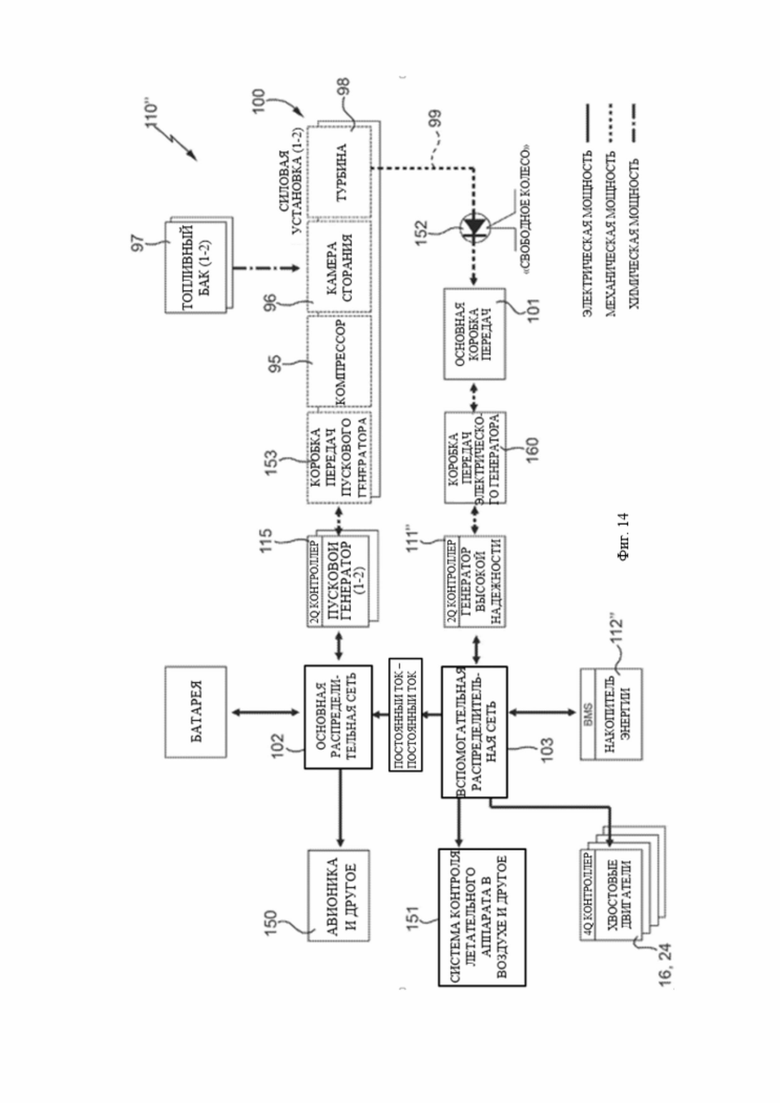
- Фигура 14 представляет собой схематический вид потока мощности в третьем варианте выполнения движительной установки, показанной на Фигуре 13;
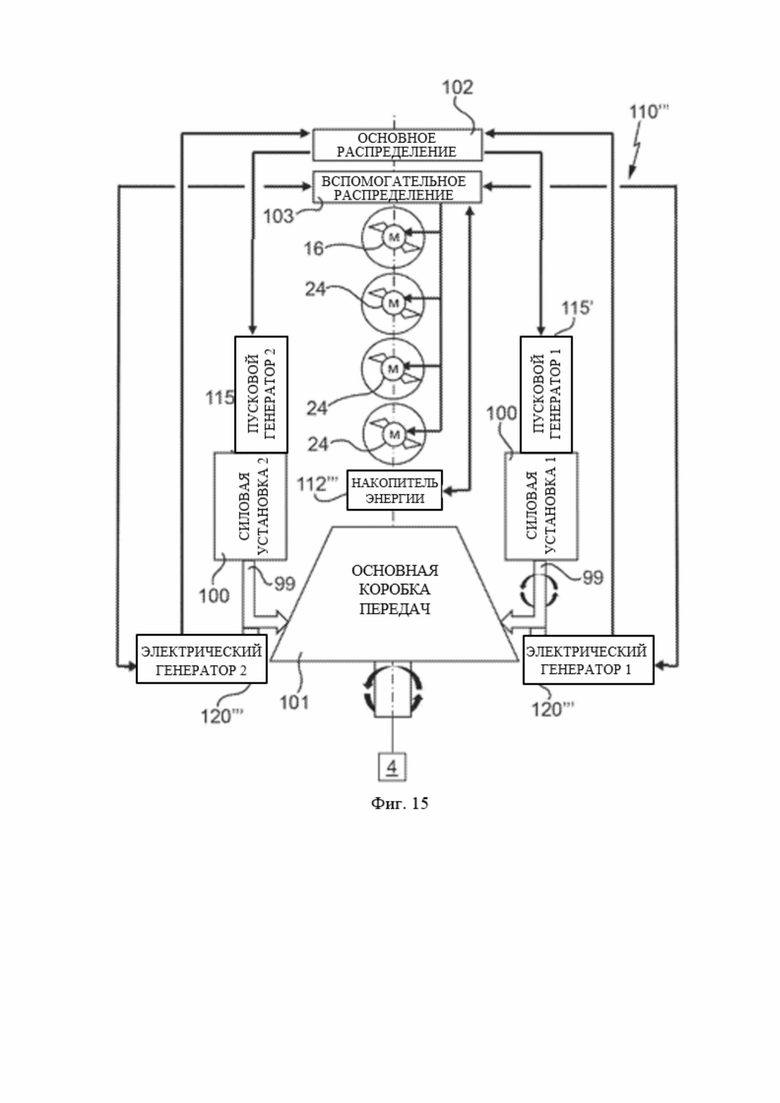
- Фигура 15 представляет собой схематичный вид пятого варианта выполнения движительной установки для системы противовращения, показанной на Фигуре 1-8; и
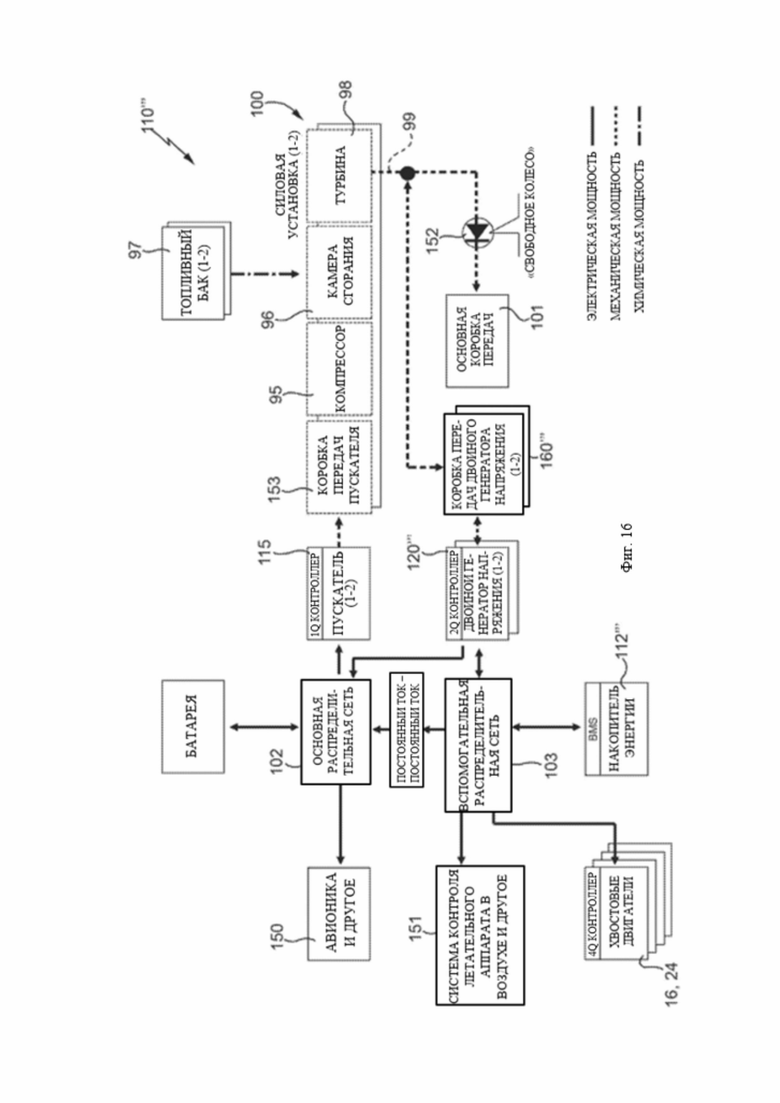
- Фигура 16 представляет собой схематический вид потока мощности в шестом варианте выполнения движительной установки, показанной на Фигуре 15.
НАИЛУЧШИЙ ВАРИАНТ ВЫПОЛНЕНИЯ ИЗОБРЕТЕНИЯ
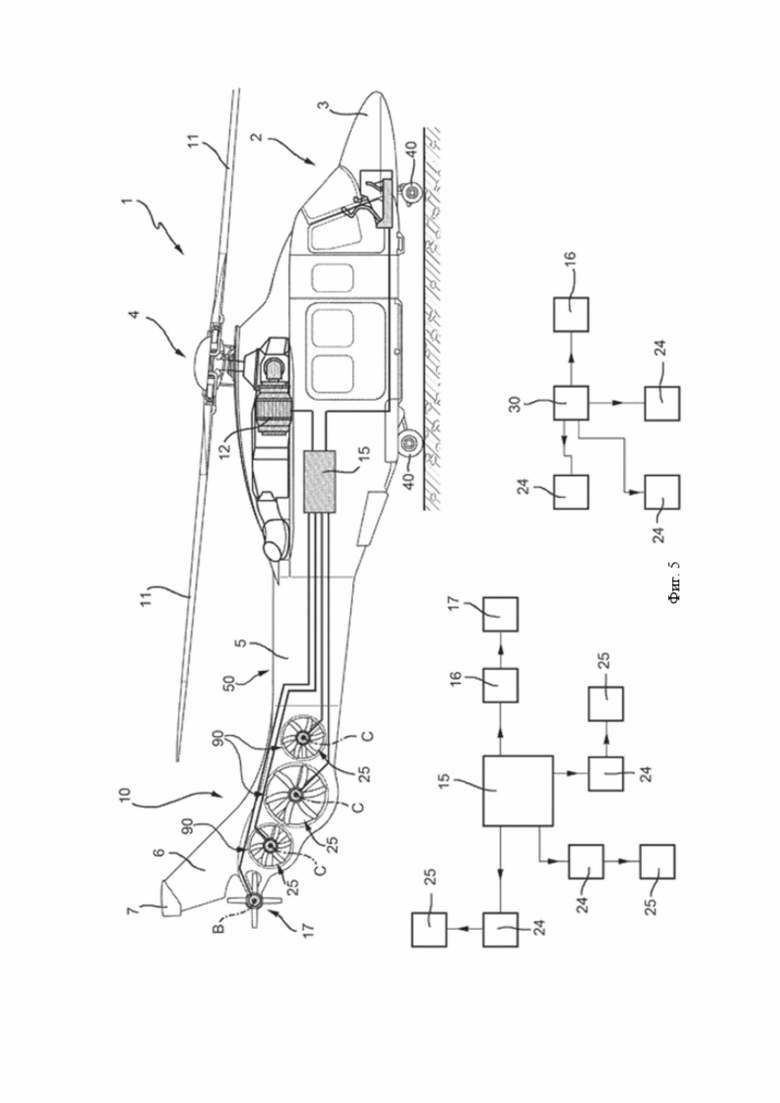
Со ссылкой на прилагаемые чертежи ссылочная позиция 1 обозначает вертолет.
В данном описании термины «более высокий», «более низкий», «вертикальный» и тому подобное в дальнейшем относятся к условию, при котором вертолет 1 находится на земле.
Вертолет 1 в своей основе включает:
- фюзеляж 2 с носом 3, расположенным спереди;
- приводной блок 12;
- несущий винт 4, снабженный группой лопастей 11, расположенных на верхней части фюзеляжа 2, приводимый в действие приводным блоком 12 и вращающийся вокруг оси A;
- хвостовой участок 5, расположенный на противоположном конце фюзеляжа 2 относительно носа 3 и содержащий ребро 6 и хвостовую плоскость 7, выступающие консольно с обеих сторон ребра 6; и
- систему 10 противовращения, удерживаемую хвостовым участком 5.
Еще точнее, хвостовой участок 5 содержит хвостовую балку 50. Ребро 6 расположено на заднем конце хвостовой балки 50, а хвостовая плоскость 7 в поперечном направлении продолжается с обеих сторон ребра 6.
В показанном варианте выполнения задняя плоскость 7 продолжается с обеих сторон верхнего участка ребра 6.
Важно отметить, что выражение «хвостовая балка» предназначено для указания в настоящем описании на конструкционную балку, способную выдерживать напряжение сдвига и изгибающие моменты, создаваемые винтами, ребром 6 и хвостовой плоскостью 7.
В контексте настоящего описания хвостовая балка также действует как кожух для защиты винтов.
Как известно, работа винта 4 позволяет управлять подъемной силой, действующей на вертолет 1, и, следовательно, изменять высоту вертолета 1.
Лопасти 11 шарнирно установлены известным образом, так что наклон диска винта может изменяться, т.е. идеальный диск определяется свободными концами лопастей 11, противоположными оси А.
Таким образом, винт 4 управляет движением вертолета 1 вперед/назад и в поперечном направлении.
Вращение лопастей 11 вокруг оси A вызывает приложение первого крутящего момента C1 к фюзеляжу 2. Этот первый крутящий момент С1 будет иметь тенденцию вызывать вращение вертолета 1 вокруг оси А.
Система 10 противовращения установлена для создания второго крутящего момента C2 с регулируемым модулем и имеющего основной компонент в направлении, противоположном первому крутящему моменту C1, чтобы иметь возможность контролировать угол рыскания вертолета 1.
Когда основной компонент этого второго крутящего момента C2 имеет тот же модуль, что и первый крутящий момент C1, система 10 противовращения предотвращает вращение вертолета 1 вокруг оси A.
Когда основной компонент этого второго крутящего момента C2 имеет более низкий или более высокий модуль, чем первый крутящий момент C1, система 10 противовращения вызывает изменение угла рыскания вертолета 1, то есть вращение вертолета 1 относительно вертикальной оси рыскания, проходящей через центр тяжести вертолета 1.
Как очевидно в дальнейшем в этом описании, при определенных маневрах, которые должны выполняться особенно быстро, система 10 противовращения создает второй крутящий момент C2 в том же направлении, что и первый крутящий момент C1, чтобы быстро поворачивать вертолет 1 в том же направлении, что и первый крутящий момент C1.
Преимущественно система 10 противовращения определена хвостовой балкой 50 и содержит:
- блок 15 электропитания;
- электрический двигатель 16 с питанием от блока 15 питания (только схематически показан на Фигуре 5); и
- винт 17, функционально соединенный с двигателем 16 и приводимый в действие двигателем 16 (только схематически показан на Фигуре 5).
Блок 15 питания может содержать генерирующую электроэнергию, функционально соединенную с приводным блоком 12, или может содержать группу батарей, или может представлять собой любой источник электрической энергии.
В частности, блок 15 питания и винт 17 могут быть соединены так, чтобы обеспечивать двусторонний поток электрической энергии/питания.
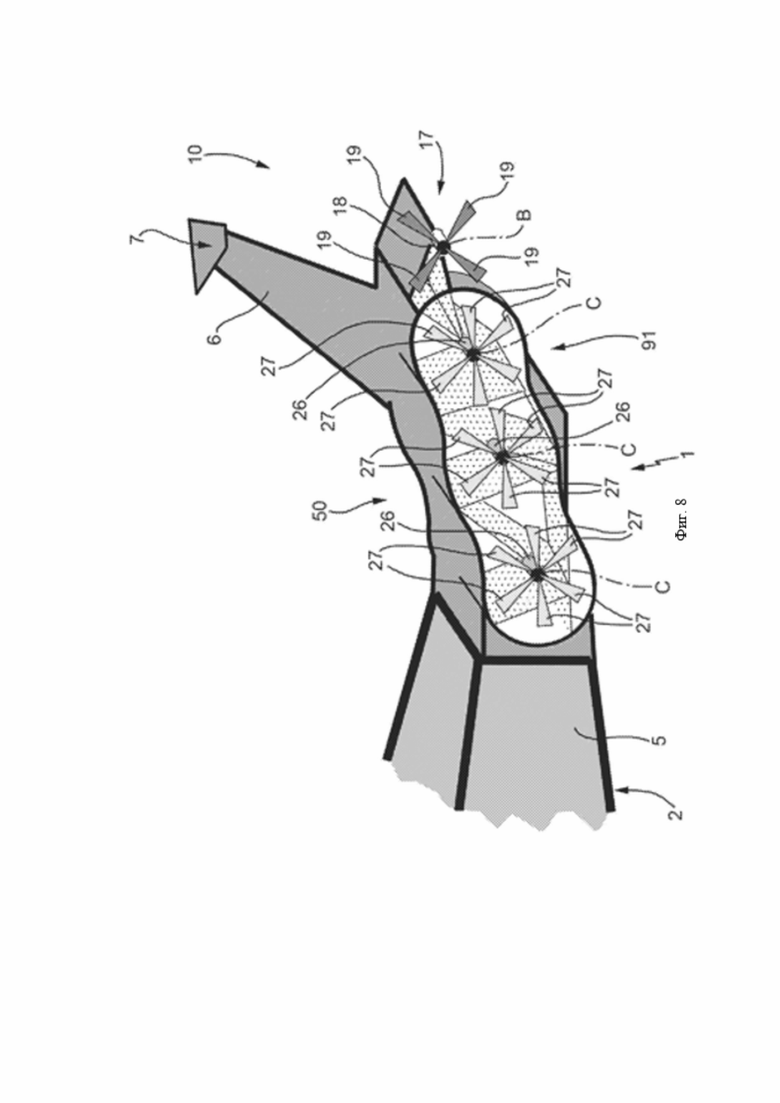
Винт 17 в основном включает втулку 18, вращающуюся вокруг оси C, и группу лопастей 19, выступающих из втулки 18 вдоль соответствующих направлений, поперечных оси В.
Электрический двигатель 16 управляет угловой скоростью винта 17.
В показанном случае углы наклона лопастей 18 фиксированы.
Следовательно, в показанном случае сила, создаваемая винтом 17 на фюзеляже 2 вдоль соответствующей оси B, а следовательно, и третий крутящий момент, регулируется путем регулирования только угловой скорости винта 17.
Система 10 противовращения также содержит группу винтов 25, три в показанном случае, функционально соединенных с блоком 15 питания, чтобы вращаться с соответствующими переменными скоростями относительно соответствующих осей B.
Система 10 противовращения также содержит группу электрических двигателей 24 (только схематично показано на Фигуре 5), приводимых в действие блоком 15 питания и функционально соединенных с соответствующими винтами 25, чтобы приводить их во вращение с соответствующими угловыми скоростями вокруг соответствующих осей С.
В свою очередь, каждый винт 25 содержит:
- втулку 26, вращающуюся вокруг соответствующей оси C; и
- группу лопастей 27, выступающих из втулки 26 вдоль соответствующих направлений, поперечных к соответствующей оси C.
В показанном случае углы наклона лопастей 27 фиксированы.
Следовательно, в показанном случае силы, создаваемые винтами 25 на фюзеляже 2 вдоль соответствующих осей С, а следовательно, и четвертый крутящий момент, регулируются путем регулирования только угловых скоростей винтов 25.
Более подробно, винты 25 имеют воздуховоды.
Со ссылкой на Фигуры 1-3, вертолет 1 включает группу воздуховодов 90 для соответствующих винтов 25. Другими словами, каждый винт 25 имеет относительный воздуховод 90.
Со ссылкой на Фигуру 8, вертолет 1 включает один общий воздуховод 91 для всех винтов 25.
Кроме того, система 10 противовращения выполнена за одно целое с хвостовой балкой 50 и прикреплена к ней.
Еще точнее, винтовые диски винтов 25 содержатся внутри хвостовой балки 50.
Вертолет 1 также включает блок 30 управления, функционально соединенный с блоком 15 питания и запрограммированный для управления скоростями вращения винтов 17 и 25.
В частности, блок 15 питания управляет крутящим моментом и скоростью электрических двигателей 16 и 24.
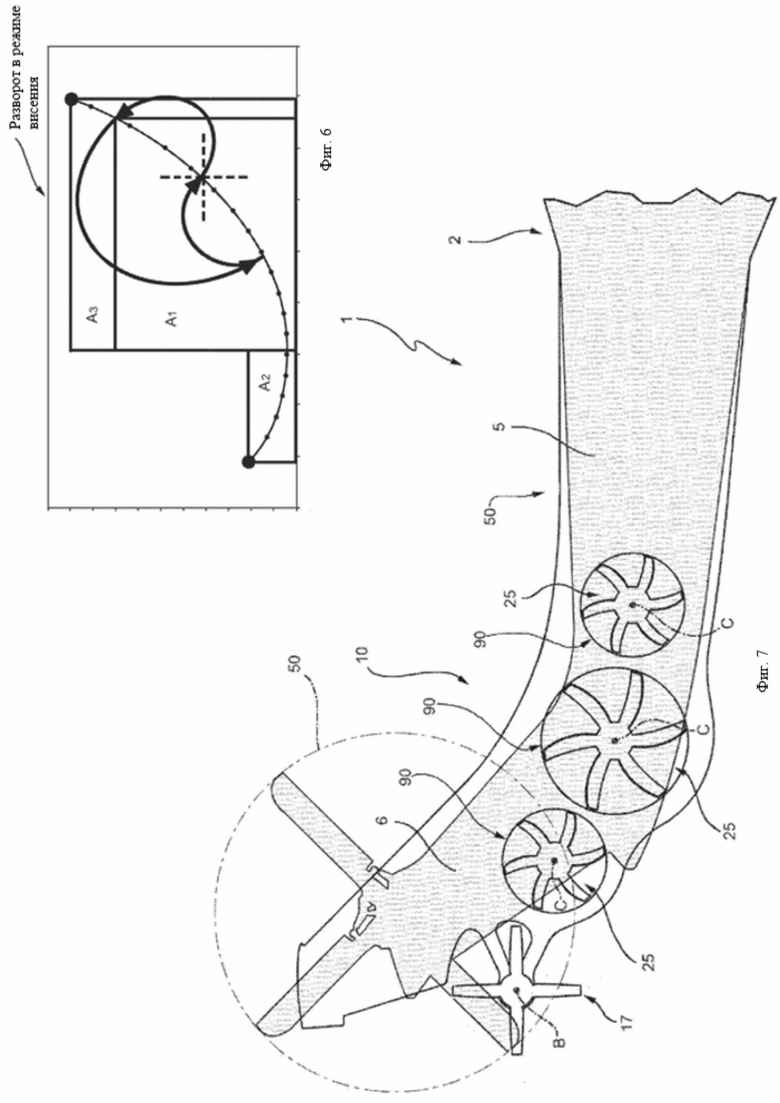
Более подробно, можно выделить следующие рабочие условия вертолета 1:
- нормальное рабочее условие (обозначенное зоной A1 на Фигуре 6), в котором первый крутящий момент C1 ниже порогового значения и должен противодействовать системе 10 противовращения со вторым крутящим моментом C2, который также ниже, чем пороговое значение, для достижения желаемого угла рыскания;
- рабочее граничное условие (обозначенное зоной A3 на Фигуре 6), в котором первый крутящий момент C1 выше порогового значения и должен противодействовать системе 10 противовращения со вторым крутящим моментом C2, который также выше, чем пороговое значение, для достижения желаемого угла рыскания; и
- дополнительное условие (обозначенное зоной A2 на Фигуре 6), при котором необходимо очень быстро повернуть вертолет 1 в направлении приложения первого крутящего момента C1 к фюзеляжу 2, чтобы достичь желаемого угла рыскания.
Блок 30 управления запрограммирован для:
- вызова вращения винтов 17 и 25 во взаимно противоположных первом и втором направлениях, соответственно, в вышеупомянутых нормальных рабочих условиях вертолета 1;
- вызова вращения винта 17 также во втором направлении, в вышеупомянутом рабочем граничном условии вертолета 1; и
- ускорения винта 17 в первом направлении и замедления или даже остановки винтов 26 во втором направлении в вышеупомянутом дополнительном условии, в котором необходимо очень быстро повернуть вертолет 1 в направлении приложения первого крутящего момента C1 на фюзеляж 2.
Более конкретно, четвертый крутящий момент, создаваемый вращением винтов 25 во втором направлении, противоположен по направлению первому крутящему моменту C1, создаваемому на фюзеляже 2 винтом 4.
Ссылаясь на Фигуру 6, функционирование системы 10 противовращения в вышеупомянутых рабочих условиях сравнивается с функционированием системы противовращения традиционного типа с одним винтом с лопастями, имеющим переменный угол наклона и применяющим одинаковое значение мощности к фюзеляжу 2.
На Фигуре 6 указан угол наклона лопастей одиночного винта системы противовращения традиционного типа на абсциссе и мощность, которую он передает на ординату.
Как следствие, на Фигуре 6 показано изменение модуля второго крутящего момента C2, разработанного системой для рабочих условий вертолета 1, обозначенных позициями A1, A2 и A3.
Кроме того, на Фигуре 6 показано, что такие же рабочие условия также достижимы с системой 10 противовращения в соответствии с ранее указанными режимами.
На Фигуре 6 также показано, как так называемый маневр с зависанием при повороте может быть достигнут с помощью системы 10 противовращения, управляя винтами 17 и 25, как ранее указано со ссылкой на нормальное рабочее условие (зона A1) и рабочее граничное условие (зона A3).
Термин «поворот при зависании» означает маневр вертолета 1 в условиях полета при зависании, при котором нос 3 поворачивается, например, на 360 градусов по часовой стрелке или против часовой стрелки.
Важно подчеркнуть, что четвертый крутящий момент, создаваемый вращением винтов 25, обычно отличается по модулю от первого крутящего момента C1, создаваемого на фюзеляже 2 винтом 4.
В показанном случае двигатели 16 и 24 подключены непосредственно к соответствующим винтам 17 и 25.
Другими словами, между двигателями 16 и 24 и соответствующими винтами 17 и 25 не установлена коробка передач для изменения передаточного числа между двигателями 16 и 24 и соответствующими винтами 17 и 25.
Ссылаясь на Фигуру 4, хвостовой участок 5 содержит:
- группу стенок 35, которые поддерживают винты 17 и 25; и
- группу отверстий 37, ограниченных стенками 35, проходящих через хвостовой участок 5 и расположенных в соответствующих впускных зонах 38 винтов 17 и 25.
В частности, стенки 35 лежат в соответствующих плоскостях, поперечных к осям В и С винтов 17 и 25.
Отверстия 37 проходят параллельно осям В и С.
Благодаря наличию отверстий 37, хвостовой участок 5 не препятствует всасыванию свежего воздуха винтами 17 и 25.
Со ссылкой на прилагаемые чертежи винт 17 расположен на конце хвостового участка 5 напротив фюзеляжа 2.
Винты 25 расположены между фюзеляжем 2 и винтом 17.
Предпочтительно, винты 25 расположены внутри хвостового участка 5 так, что лопасти 27 не выступают за пределы хвостового участка 5.
В одном варианте выполнения опоры винтов 25 также выполняют часть конструкции при передаче нагрузок, действующих на хвостовой участок 5.
В дополнительном варианте выполнения винты 17 и 25 расположены так, чтобы создавать соответствующие силы на фюзеляже 2, также имеющем соответствующие вертикальные компоненты.
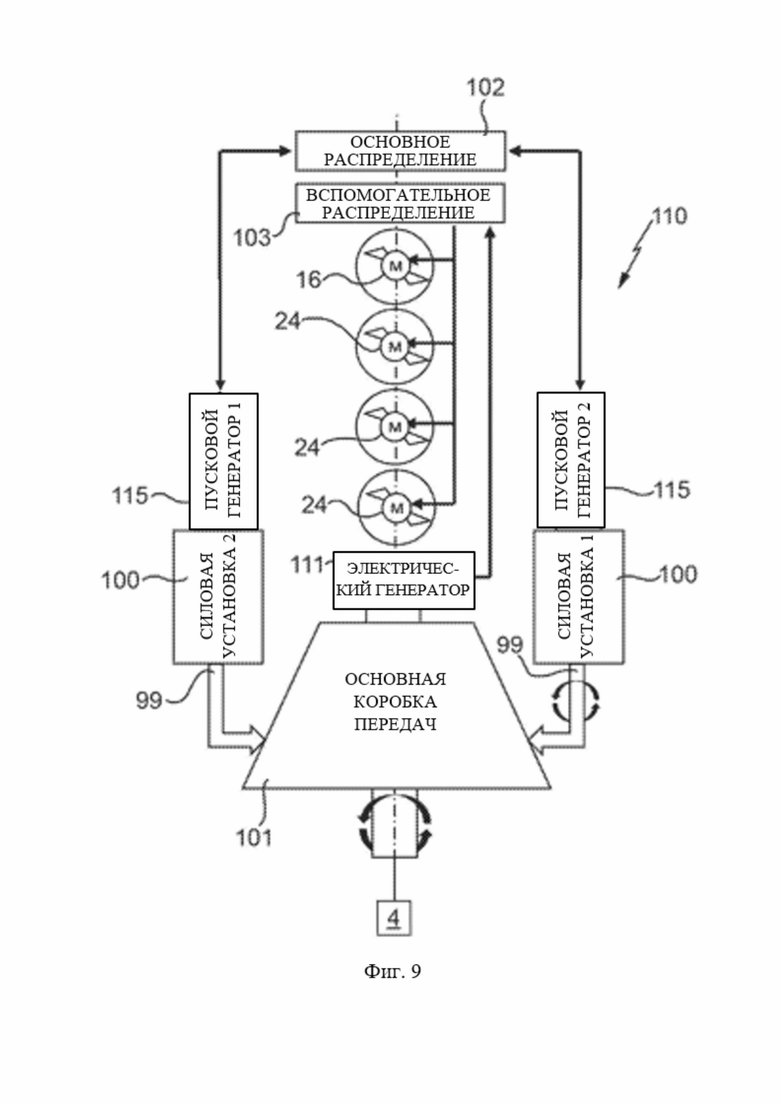
Со ссылкой на Фигуры 9-16 вертолет 1 включает:
- пару силовых установок 100 (показаны только схематически);
- главную коробку 101 передач (только схематически показана), которая приводит во вращение несущий винт 4; и
- пару свободных колес 152, которые установлены между соответствующими силовыми установками 100 и главной коробкой 101 передач.
Кроме того, вертолет 1 включает:
- базовую распределительную сеть 102 (показана только схематически), которая установлена для электрической подачи маломощных электрических нагрузок 150, например, нагрузки авионики; и
- вспомогательную распределительную сеть 103 (показана только схематически), которая установлена для электрической подачи мощных электрических нагрузок 151, например, некоторых приводов лопастей винтов 25.
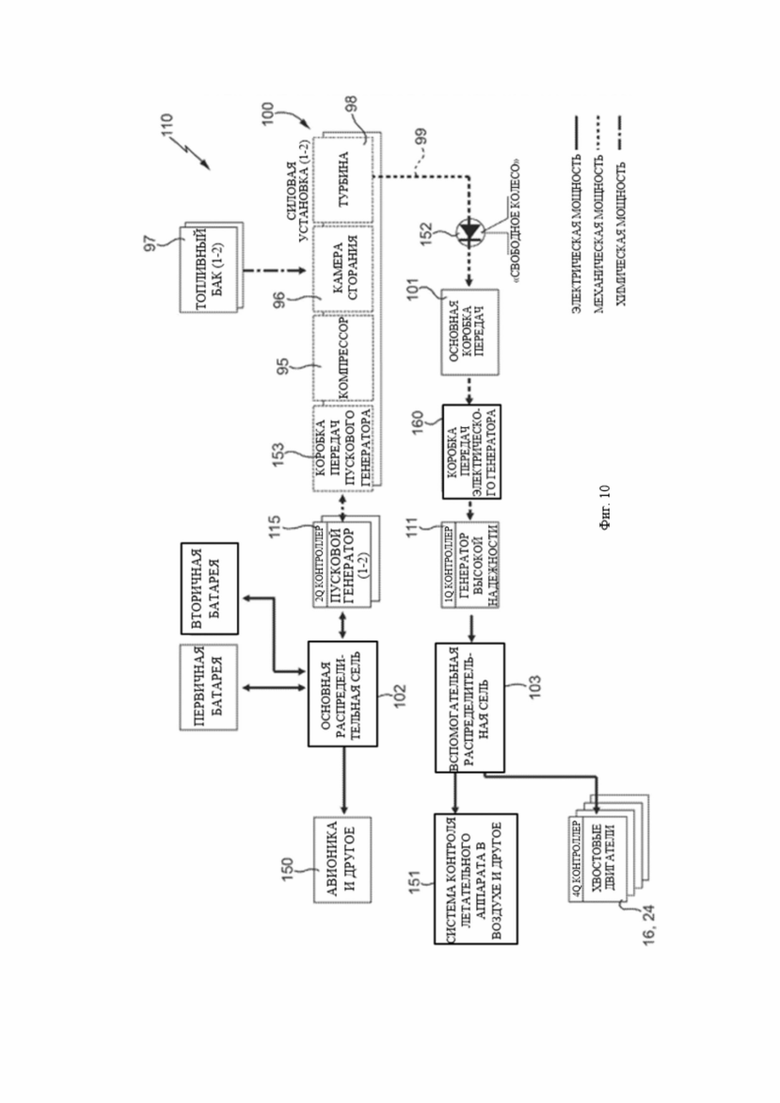
В варианте выполнения, показанном на Фигуре 9 и 10, каждая силовая установка 100 представляет собой газовую турбину, которая по существу содержит (Фигура 10):
- передний компрессор 95, который увеличивает давление воздушного потока, всасываемого из внешней среды;
- камеру 96 сгорания, в которой топливо, хранящееся в топливном баке 97, распыляется в воздушный поток и поджигается, чтобы повысить температуру смеси воздуха и сжигаемого газа; и
- заднюю турбину 98, в которой смесь расширяется и приводит во вращение вал 99, который функционально соединен с коробкой 101 передач посредством установки свободного колеса 152.
Вспомогательная распределительная сеть 103 дополнительно снабжает двигатели 16, 24 электрической мощностью.
Блок 15 электропитания дополнительно содержит двигательную систему 110 для электрического питания двигателей 16, 24 электрической мощностью.
Со ссылкой на Фигуры 9 и 10, двигательная установка 110 содержит один электрический генератор 111, который приводится в действие коробкой 101 передач и выдает электрическую мощность.
В частности, электрическая мощность, вырабатываемая электрическим генератором 111, подается во вспомогательную распределительную сеть 103.
В показанном варианте выполнения электрический генератор 111 является электрическим генератором с высокой избыточностью.
Кроме того, электрический генератор 111 представляет собой одностороннюю электрическую машину, то есть электрический генератор 111 преобразует только часть механической мощности, снабжаемой коробкой 101 передач, в электрическую мощность, подаваемую во вспомогательную распределительную сеть 103.
Кроме того, каждая силовая установка 100 снабжена относительным пусковым генератором 115, который расположен между базовой распределительной сетью 102 и коробкой передач 153 (только схематично показано на Фигуре 10) силовой установки 100, соединенной с соответствующим компрессором 95.
Каждый пусковой генератор 115 представляет собой двустороннюю электрическую машину, то есть пусковой генератор 115 либо преобразует электрическую мощность, снабжаемую базовой распределительной сетью 102, в механическую мощность, предоставляемую соответствующему компрессору 95 во время этапа запуска относительной силовой установки 100, либо преобразует часть механической мощности, снабжаемой относительным компрессором 95, в электрическую мощность, снабжаемую основной распределительной сети 102.
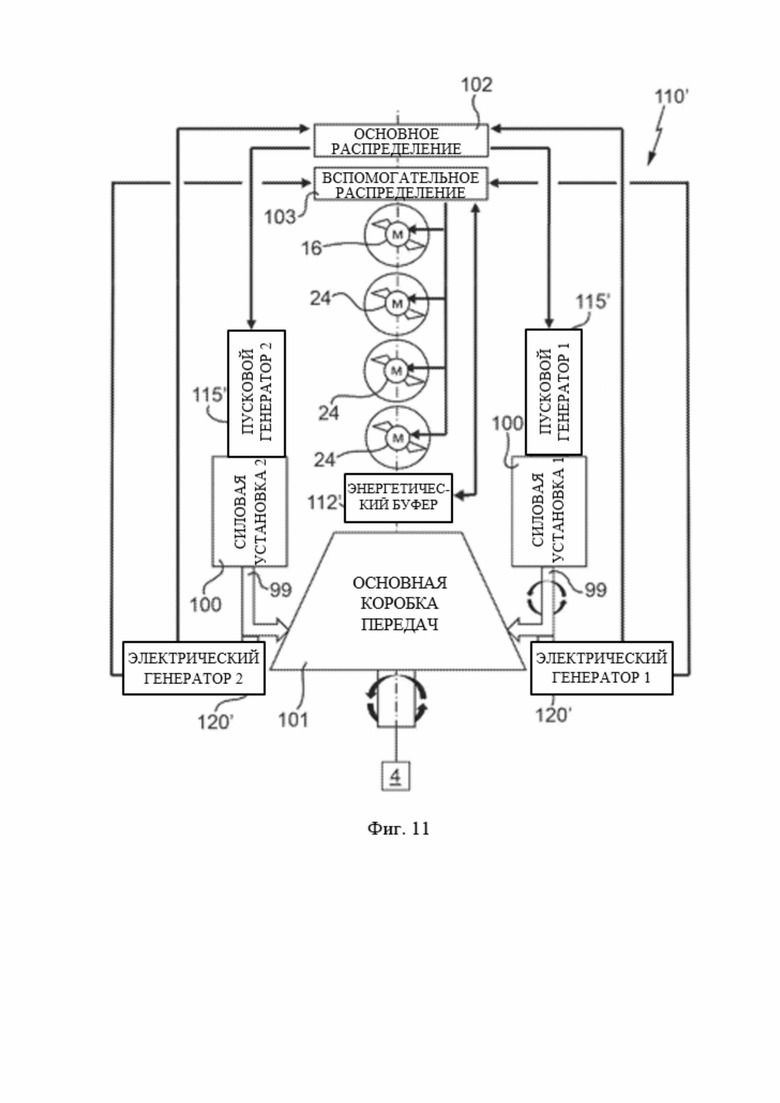
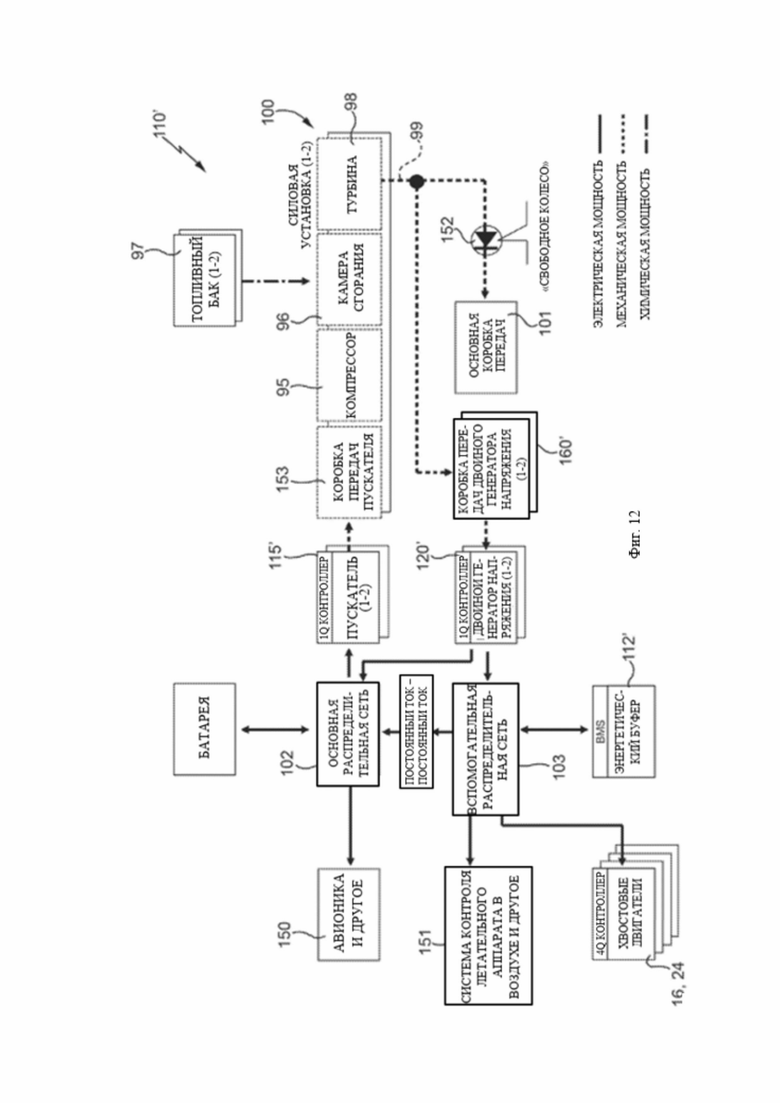
Со ссылкой на Фигуры 11 и 12, 110’ обозначает второй вариант выполнения двигательной системы.
Двигательная система 110’ аналогична двигательной системе 110 и будет раскрыта в дальнейшем только в той мере, в которой она отличается от последней; соответствующие части или эквиваленты двигательной системы 110, 110’ будут обозначены, где это возможно, теми же ссылочными позициями.
Двигательная система 110’ отличается от двигательной системы 110 тем, что она не содержит электрический генератор 111’’ и содержит два электрических генератора 120’, приводимых в действие соответствующей силовой установки 100.
Электрические генераторы 120’ являются односторонними электрическими машинами. В частности, электрические генераторы 120’ преобразуют только часть механической мощности, снабжаемой относительным валом 99, в электрическую мощность, подаваемую во вспомогательную распределительную сеть 103.
В показанном варианте выполнения двигательная система 110’ содержит пару дополнительных коробок передач 160’ (схематично показано только на Фигуре 12). Каждая дополнительная коробка 160’ передач функционально расположена между относительным валом 99 и относительным электрическим генератором 120’.
В показанном варианте выполнения электрические генераторы 120’ представляют собой электрические генераторы 110’ с двумя напряжениями, которые могут питать вспомогательную распределительную сеть 103 двумя уровнями напряжений.
Двигательная система 110’ также отличается от двигательной системы 110 тем, что она включает накопитель 112’ энергии, например, батарею, которая электрически соединена со вспомогательной распределительной сетью 103.
Накопитель 112’ энергии обычно заряжается вспомогательным распределением 103 во время нормальной работы электрического генератора 120’.
Накопитель 112’ энергии питает вспомогательное распределение 102 и, следовательно, винты 16, 24 электрической мощностью в случае выхода из строя электрического генератора 120’.
Наконец, двигательная установка 110’ отличается от двигательной системы 110 тем, что она содержит пускатели 115’ вместо пускового генератора 115.
Пускатели 115′ представляют собой одностороннюю электрическую машину, которая способна преобразовывать электрическую энергию, полученную базовой распределительной сетью 102, в механическую мощность, предоставляемую компрессорам 99 соответствующих силовых установок 100’.
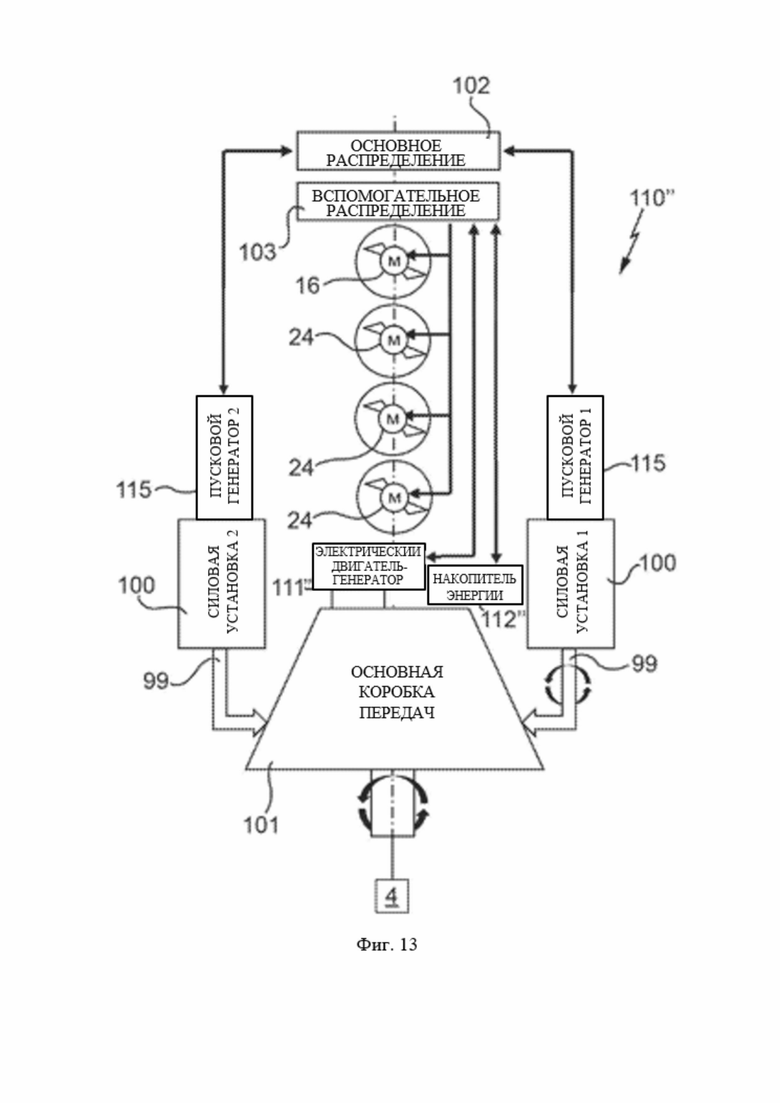
Со ссылкой на Фигуры 13 и 14, 110’’ обозначает третий вариант выполнения двигательной системы.
Силовая установка 110’ аналогична двигательной системе 110 и будет раскрыта в дальнейшем только в той мере, в которой она отличается от последней; соответствующие части или эквиваленты двигательной системы 110, 110’ будут обозначены, где это возможно, теми же ссылочными позициями.
В частности, двигательная система 110’’ отличается от двигательной системы 110 тем, что двигатель-генератор 111’’ является двусторонней электрической машиной. В частности, двигатель-генератор 111’’ способен преобразовывать часть механической мощности, снабжаемой главной коробкой 101 передач, в электрическую мощность, предоставляемую вспомогательной распределительной сети 103 во время нормальной работы силовой установки 100. В качестве альтернативы, двигатель-генератор 111’’ способен преобразовывать электрическую мощность, снабжаемую вспомогательной распределительной сетью 103, в механическую мощность, предоставляемую главной коробке передач 102, в случае выхода из строя одной или обеих силовых установок 100 или в случае необходимости повышения мощности из-за особо тяжелых условий с точки зрения рабочей температуры и рабочей высоты.
Двигательная система 110’’ также отличается от двигательной системы 110 тем, что она содержит накопитель 112’’ энергии, например батарею, которая электрически соединена со вспомогательной распределительной сетью 103 и, следовательно, с винтами 16, 24.
В частности, накопитель 112’’ энергии заряжается вспомогательной распределительной сетью 103 во время нормальной работы двигателя-генератора 111’’.
Накопитель 112’’ энергии питает вспомогательное распределение 102 и, следовательно, винты 16, 24 электрической мощностью в случае выхода из строя двигателя-генератора 111’’.
Со ссылкой на Фигуры 15 и 16, 110’’’ обозначает третий вариант выполнения двигательной системы.
Двигательная система 110’’’ аналогична двигательной системе 110’ и будет раскрыта в дальнейшем только в той мере, в которой она отличается от последней; соответствующие части или эквиваленты двигательной системы 110’, 110’’’ будут обозначены, где это возможно, теми же ссылочными позициями.
В частности, двигательная система 110’’’ отличается от двигательной установки 110’ тем, что она содержит двигатели-генераторы 120’’’ вместо соответствующих электрических генераторов 120’.
В показанном варианте выполнения двигатели-генераторы 120’’’ представляют собой двусторонние электрические машины.
В частности, каждый двигатель-генератор 120’’’ способен преобразовывать часть механической мощности, снабжаемой относительным валом 99, в электрическую мощность, доступную для вспомогательной распределительной сети 103 - и, следовательно, для двигателей 16, 24 во время нормальной работы силовых установок 100. В качестве альтернативы, двигатель-генератор 120’’’ способен преобразовывать электрическую мощность, снабжаемую вспомогательной распределительной сетью 103, в механическую мощность, доступную для вала 99 и, следовательно, для главной коробки 102 передач в случае выхода из строя одной или обеих силовых установок 100 или в случае необходимости повышения мощности из-за особо тяжелых условий с точки зрения рабочей температуры и рабочей высоты.
При использовании работа винта 4 обеспечивает движение вертолета 1 вверх/вниз, вперед/назад и в поперечном направлении.
При работе винта 4 на фюзеляже 2 создается первый крутящий момент С1, который может вызвать вращение вертолета 1 вокруг оси рыскания.
При работе системы 10 противовращения на фюзеляже 2 создается второй крутящий момент C2 в направлении, противоположном первому крутящему моменту C1.
Этот второй крутящий момент C2 определяет угол рыскания вертолета 1.
Более подробно и со ссылкой на нормальное рабочее условие, обозначенное позицией A1 на Фигуре 6, блок 30 управления управляет электрическими двигателями 16 и 24, чтобы вызвать:
- вращение винта 17 в первом направлении вращения с первой скоростью вращения; и
- вращение винта 25 во втором направлении вращения с соответствующими вторыми скоростями вращения.
В частности, скорости винтов 25 могут отличаться друг от друга.
Таким образом, винты 17 и винты 25 создают соответствующие силы на фюзеляже 2 и, следовательно, соответствующие третий и четвертый крутящие моменты, имеющие противоположные направления. Результирующий из этих третьего и четвертого крутящих моментов создает второй крутящий момент C2.
Разница между вторым крутящим моментом C2 и первым крутящим моментом C1 определяет угол рыскания вертолета 1.
Ссылаясь на рабочее граничное условие, обозначенное как A3 на Фигуре 6, блок 30 управления управляет электрическими двигателями 16 и 24, так что третий и четвертый крутящие моменты имеют одинаковое направление и могут противостоять первому крутящему моменту C1, который выше порогового значения.
Предпочтительно блок 30 управления управляет электрическими двигателями 16 и 24 так, что оба винта 17 и 25 вращаются во втором направлении.
Блок 30 управления запрограммирован таким образом, что изменение направления вращения винтов 17 происходит постепенно и что, предпочтительно, винты 25 ускоряются во время этого этапа изменения движения.
Со ссылкой на дополнительное условие, обозначенное A2 на Фигуре 6, в котором необходимо очень быстро повернуть вертолет 1 в направлении приложения первого крутящего момента C1 к фюзеляжу 2, блок 30 управления запрограммирован на замедление или даже остановку вращения винтов 25 и на увеличение скорости вращения винта 17 в первом направлении.
Таким образом, третий крутящий момент, создаваемый винтом 17, добавляется к первому крутящему моменту С1 и позволяет быстро повернуть вертолет 1 до желаемого угла рыскания.
Поток воздуха, всасываемый винтами 17 и 25, проходит через отверстия 37 и практически не нарушается или незначительно нарушается хвостовым участком 5 вертолета 1.
В случае, когда винты 17 и 25 расположены так, чтобы создавать соответствующие силы на фюзеляже 2, также имеющем соответствующие вертикальные компоненты, блок 30 управления управляет двигателями 16 и 24, чтобы достичь желаемой вертикальной тяги, которая позволяет управлять тангажным движением вертолета 1.
Кроме того, силовые установки 100 приводят во вращение главную коробку 101 передач, который, в свою очередь, приводит во вращение несущий винт 4.
В варианте выполнения, показанном на Фигуре 9 и 10, электрический генератор 111 преобразует часть механической мощности главной коробки 101 передач в электрическую мощность, которое предоставляется для вспомогательного распределения 103 и, следовательно, для двигателей 16, 24.
Пусковые генераторы 115 преобразуют электрическую мощность, снабжаемое базовой распределительной сетью 102, в механическую мощность, предоставляемую относительным компрессорам 95 во время этапа запуска соответствующих силовых установок 100. Кроме того, пусковые генераторы 115 преобразуют часть механической мощности, снабжаемой соответствующими компрессорами 95, в электрическую мощность, предоставляемую основной распределительной сети 102 во время нормальной работы соответствующих силовых установок 100.
Со ссылкой на Фигуры 11 и 12 работа двигательной системы 110’ аналогична работе двигательной системы 110 и будет раскрыта в дальнейшем только в той степени, в которой она отличается от последней.
Работа двигательной системы 110’ отличается от работы двигательной системы 110 тем, что:
- электрические генераторы 120’ преобразуют часть механической мощности, снабжаемой соответствующими валами 99, в электрическую мощность, подаваемую во вспомогательную распределительную сеть 103 и, следовательно, в двигатели 16, 24;
- накопитель 112 энергии обычно заряжается вспомогательным распределением 103 во время нормальной работы электрического генератора 111 и питает вспомогательное распределение 102 и, следовательно, винты 16, 24 электрической мощностью в случае выхода из строя электрических генераторов 120; и
- пускатели 115′ представляют собой одностороннюю электрическую машину, которая способна преобразовывать только электрическую энергию, получаемую вспомогательной распределительной сетью 102, в механическую мощность, предоставляемую компрессорам 99 соответствующих силовых установок 100’.
Со ссылкой на Фигуры 13 и 14 работа двигательной системы 110’’ аналогична работе двигательной системы 110 и будет раскрыта в дальнейшем только в той степени, в которой она отличается от последней.
Работа двигательной системы 110’’ отличается от работы двигательной системы 110 тем, что:
- двигатель-генератор 111’’ преобразует часть механической мощности, снабжаемой главной коробкой 101 передач, в электрическую мощность, предоставляемую вспомогательной распределительной сети 103 и, следовательно, винтам 16, 24 во время нормальной работы силовых установок 100;
- двигатель-генератор 111’’ преобразует электрическую мощность, снабжаемую вспомогательной распределительной сетью 103, в механическую мощность, предоставляемую главной коробке передач 102, в случае выхода из строя одной или обеих силовых установок 100 или в случае необходимости повышения мощности из-за особо тяжелых условий с точки зрения рабочей температуры и рабочей высоты;
- накопитель энергии 112’’ заряжается вспомогательным распределением 103 во время нормальной работы двигателя-генератора 111’’; и
- Накопитель 112’’ энергии питает вспомогательное распределение 102 и, следовательно, винты 16, 24 электрической мощностью в случае выхода из строя двигателя-генератора 111’’.
Со ссылкой на Фигуры 15 и 16 работа двигательной системы 110’’’ аналогична работе двигательной системы 110’ и будет раскрыта в дальнейшем только в той степени, в которой она отличается от последней.
Работа двигательной системы 110’’’ отличается от работы двигательной системы 110’ тем, что:
- каждый двигатель-генератор 120’’’ преобразует часть механической мощности, снабжаемой относительным валом 99, в электрическую мощность, доступную для вспомогательной распределительной сети 103 - и, следовательно, для двигателей 16, 24 - во время нормальной работы силовых установок 100; и
- каждый двигатель-генератор 120’’’ преобразует электрическую мощность, снабжаемую вспомогательной распределительной сетью 103, в механическую мощность, доступную для вала 99 и, следовательно, для главной коробки 102 передач в случае выхода из строя одной или обеих силовых установок 100 или в случае повышения мощности требуется из-за особо тяжелых условий с точки зрения рабочей температуры и рабочей высоты.
Из исследования характеристик вертолета 1 очевидны преимущества, которые могут быть достигнуты с ним.
В частности, система 10 противовращения содержит винт 17, вращающийся с первой угловой скоростью и приводимый в действие электрическим двигателем 16, и группа винтов 25, вращающихся с соответствующими вторыми угловыми скоростями и приводимых в действие соответствующими электрическими двигателями 24.
Как следствие, система 10 противовращения имеет определенный уровень резервирования, который позволяет обеспечить определенный уровень функциональных возможностей в случае выхода из строя одного из винтов 17 и 25.
Кроме того, в отличие от EP-B-3254962, система 10 противовращения интегрирована с хвостовой балкой 50 и, следовательно, конструктивно способствует поддержанию изгибающего момента и напряжения сдвига, создаваемого ребром 6 и хвостовой плоскостью 7, либо из-за их массы и/или воздействия аэродинамических сил.
Как следствие, одна и та же хвостовая балка 50 является одновременно и элементом конструкции, и элементом сдерживания для системы 10 противовращения, в то время как система EP-B-3254962 противовращения соединяется на заднем конце хвостовой балки 50 и просто подвергается нагрузкам, создаваемым самой собой.
Во-вторых, в отличие от EP-B-3254962, можно сохранить преимущества, имеющиеся от расположения ребра 6 на заднем конце хвостовой балки 50 и хвостовой плоскости 7 на верхней части ребра 6, без увеличения общего сопротивления, веса и уровня шума и вибрации вертолета 1.
В частности, ребро 6 позволяет дополнительно контролировать рыскание вертолета 1, особенно в прямом полете. Это дополнительное регулирование рыскания полезно в случае поломки системы 10 противовращения или в случае, если система 10 противовращения намеренно остановлена (или замедлена) в прямом полете для экономии энергии и уменьшения внешнего шума. Эффект хвостовой плоскости 7 заключается в том, чтобы увеличить вертикальную устойчивость вертолета 1. Будучи расположенным на верхнем конце ребра 6, хвостовая плоскость 7 лишь незначительно сталкивается с следом от винта 4. Соответственно, создание шума и вибраций уменьшается с особым акцентом на переход от зависания к полету вперед.
Напротив, EP-A-3254962 включает пару боковых стабилизаторов, которые выступают в боковом направлении от хвостовой балки. Эти боковые стабилизаторы увеличивают поперечное сечение и вес вертолета. Кроме того, из-за их положения боковые стабилизаторы, вероятно, сталкиваются с следом, создаваемым несущим винтом. Чтобы избежать этой проблемы, стабилизаторы могут быть вытянуты, что, тем не менее, приведет к дальнейшему ухудшению общего сопротивления и веса вертолета.
Двигательная система 110, 110’’ особенно рентабельна, поскольку для электрического питания двигателей 16, 24 требуется один генератор 111, 111’. Кроме того, накопитель 112’’ энергии могут эффективно использовать для питания вспомогательного распределения 102 и, следовательно, винтов 16, 24 электрической мощностью в случае выхода из строя генератора 111, 111’’.
Двигательная система 110’’ еще более выгодна, потому что единственный генератор 111’’ является двигателем-генератором. Таким образом, двигатель-генератор 120’’’ преобразует электрическую мощность, снабжаемую вспомогательной распределительной сетью 103, в механическую мощность, доступную для вала 99 и, следовательно, для главной коробки 102 передач в случае выхода из строя одной или обеих силовых установок 100 или в случае, если требуется повышенная мощность из-за особо тяжелых условий с точки зрения рабочей температуры и рабочей высоты.
Двигательная система 110’, 110’’’ содержит два генератора 120’, 120’’, что делает ее более надежной в случае выхода из строя одного генератора 120, 120’’.
Надежность двигательной системы 110’, 110’’’ увеличивается за счет накопителя 112’, 112’’’ энергии, который питает вспомогательное распределение 102 и, следовательно, винты 16, 24 электрической мощностью в случае выхода из строя электрических генераторов 120’.
Со ссылкой на двигательную систему 110’’’, двигатель-генератор 120’’’ преобразует электрическую мощность, снабжаемую вспомогательной распределительной сетью 103, в механическую мощность, доступную для вала 99 и, следовательно, для главной коробки 102 передач в случае выхода из строя одной или обеих силовых установок 100 или в случае, если требуется повышенная мощность из-за особо тяжелых условий с точки зрения рабочей температуры и рабочей высоты.
Кроме того, из-за того, что электрические двигатели 16 и 24 имеют в широком диапазоне скоростей вращения массу, пропорциональную максимальному крутящему моменту, который они могут создавать, разделение второго крутящего момента C2 на несколько винтов 17 и 25 позволяет уменьшить крутящие моменты, которые должны создаваться индивидуально винтами 17 и 25. Вследствие этого можно также уменьшить массу винтов 17 и 25 относительно эквивалентной системы 50 противовращения с одним электрическим винтом (Фигура 7), имеющим одинаковую результирующую силу на фюзеляже 2, одинаковую площадь зоны, равную сумме площадей зон винтов 17 и 25 и одинаковую максимальную скорость наклона соответствующих лопастей 19 и 27.
Более конкретно, при прочих равных условиях общий вес электрических машин уменьшается с увеличением общего числа винтов 17 и 25, что имеет очевидные преимущества в вертолетной промышленности.
Вследствие того, что винты 17 и 25 имеют соответствующие зоны, меньшие, чем общая площадь зоны вышеупомянутой эквивалентной одновинтовой системы 50 противовращения, возможно повысить скорость вращения указанных выше винтов 17 и 25 без превышения максимальной скорости вращения соответствующих лопастей 19 и 27 и, следовательно, без остановки указанных выше соответствующих лопастей 19 и 27.
Это увеличение скорости вращения винтов 17 и 25 достигается без использования коробки передач между электрическими двигателями 16 и 24 и соответствующими винтами 17 и 25.
Кроме того, чтобы избежать веса соответствующих коробок передач, прямое соединение привода между электрическими двигателями 16 и 24 и соответствующими винтами 17 и 25 позволяет избежать обременительных проблем обслуживания и смазки таких коробок передач. В связи с этим следует отметить, что любая коробка передач, вставленная между электрическим двигателем 16 и винтом 17, обязательно должна передавать движение винту 17 как в первом направлении, так и во втором направлении, создавая значительные усталостные напряжения на компонентах коробки передач.
Винты 17 и 25 могут быть выполнены с меньшими площадями зон и, следовательно, меньшими диаметрами по отношению к вышеупомянутой эквивалентной одновинтовой системе 50 противовращения (схематично показано на Фигуре 7). Благодаря этому винты 17 и 25 могут быть легко размещены в положении, в котором они аэродинамически мешают винту 4 по существу уменьшенным образом. Как следствие, производительность вертолета 1 могут быть улучшены, и внешний шум, создаваемый вертолетом 1, может быть уменьшен.
Винты 17 и 25 могут быть расположены вдоль хвостового участка 5 с соответствующими дисками, лежащими в соответствующих плоскостях, поперечных относительно вертикального направления. Таким образом, блок 30 управления может управлять скоростью вращения этих винтов 17 и 25, чтобы создавать вертикальный подъем, который полезен для управления тангажем вертолета 1.
Кроме того, в отличие от известных решений, описанных во вводной части этого описания, система 10 противовращения позволяет управлять углом рыскания вертолета 1 и противодействовать первому крутящему моменту С1, воздействуя исключительно на угловые скорости винтов 17 и 25.
В результате система 10 противовращения также позволяет использовать винты 17 и 25, имеющие соответствующие лопасти 19 и 27 с соответствующими фиксированными углами наклона, с очевидными конструктивными упрощениями.
При таких обстоятельствах система 10 противовращения оказывается особенно выгодной в отношении решений, в которых используется единственный рулевой винт с лопастями, имеющими фиксированный угол наклона. Фактически, эти последние решения обязательно требуют изменения направления вращения одиночного рулевого винта, когда необходимо изменить направление крутящего момента, приложенного к фюзеляжу, для управления углом рыскания. Это изменение требует остановки вращения одиночного рулевого винта и ускорения его в противоположном направлении. В этой ситуации вертолет неизбежно остается трудноуправляемым в течение переходного периода.
И наоборот, решение согласно настоящему изобретению позволяет при нормальных рабочих условиях вертолета 1 (зона А1 на Фигуре 6) изменять направление второго крутящего момента С2, приложенного к фюзеляжу 2 вертолета, путем простого уменьшения или увеличения угловых скоростей винтов 17 и 25 и без необходимости их остановки.
Это делает вертолет 1 особенно управляемым для широкого диапазона углов рыскания, соответствующих значениям мощности, и, следовательно, большего присутствующего первого крутящего момента C1 на фазах полета вертолета 1.
Даже когда необходимо изменить направление вращения винта 17 в рабочее граничное условие вертолета 1 (зона A3 на Фигуре 6), нет необходимости мгновенно останавливать вращение винта 17 в первом направлении. Напротив, в этом граничном условии блок 30 управления вызывает увеличение скорости вращения винтов 25 во втором направлении, в то время как винт 17 замедляет свое вращение в первом направлении, останавливается и ускоряется во втором направлении.
Как видно на Фигуре 6, система 10 противовращения позволяет выполнять маневр с зависанием при повороте, показанный на Фигуре 6, путем простого управления винтами 17 и 25 частично в соответствии с тем, что применимо в нормальных рабочих условиях вертолета 1, и частично согласно тому, что применимо в граничных условиях вертолета 1.
Система 10 противовращения также позволяет очень быстро поворачивать вертолет 1 в направлении приложения первого крутящего момента C1 (зона A2 на Фигуре 6). В этой ситуации блок 30 управления увеличивает скорость вращения винта 17 в первом направлении и замедляет или даже останавливает скорость вращения винтов 25 во втором направлении.
Отверстия 37 проходят через хвостовой участок 5 и расположены в соответствующих впускных зонах 38.
Таким образом, воздушный поток, всасываемый винтами 17 и 25, практически не нарушается или незначительно нарушается хвостовым участком 5 вертолета 1. Это обеспечивает последовательную эффективную работу винтов 17 и 25.
Расположение винтов 17 и 25 ограничивает риск их повреждения и/или создания опасности в зоне посадки вертолета 1 в случае аварийной посадки (Фигура 2). В таком случае вертолет 1 может приземлиться не с шасси 40, лежащим на земле, а с наклонным шагом относительно земли. В этом условии винты 17 и 25 оторваны от земли.
Наконец, опоры электрических двигателей 16 и 24 могут быть встроены в хвостовой участок 5, чтобы также выполнять конструктивную функцию.
Воздуховод 91 проложен к более чем одному винту 25, к трем в показанном варианте выполнения.
Таким образом, можно достичь одинаковых аэродинамических преимуществ решения со всеми винтами 25, индивидуально проложенными, в то же время избегая геометрических ограничений, которые эти отдельные воздуховоды будут представлять для компоновки хвостовой балки 5.
Наконец, ясно, что модификации и варианты могут быть сделаны в отношении вертолета 1 без отклонения от объема защиты, определенного формулой изобретения.
В частности, двигательная система 100, 100’, 100’’, 100’’’ может быть применена к вертолету с одним рулевым винтом 17, 25.
Изобретение относится к области авиации, в частности к конструкциям вертолетов с системами противовращения. Вертолет (1) включает фюзеляж (2), несущий винт (4), систему (10) противовращения, хвостовую балку (50), соединенную с фюзеляжем (2), киль (6) и хвостовую плоскость (7), выступающую консольно с обеих сторон указанного киля (6). Система (10) противовращения выполнена за одно целое c хвостовой балкой (50) и содержит блок (15) электропитания, второй винт (17), соединенный с указанным блоком (15) электропитания для вращения с первой переменной угловой скоростью, и третий винт (25), соединенный с указанным блоком (15) электропитания и работающий посредством указанного блока (15) электропитания для вращения со второй переменной угловой скоростью. Обеспечивается уровень избыточности в системе противовращения без ущерба для возможности управления углом рыскания вертолета в каждом рабочем условии, уменьшение поперечного сечения, общего сопротивления и веса вертолета. 3 н. и 27 з.п. ф-лы, 16 ил.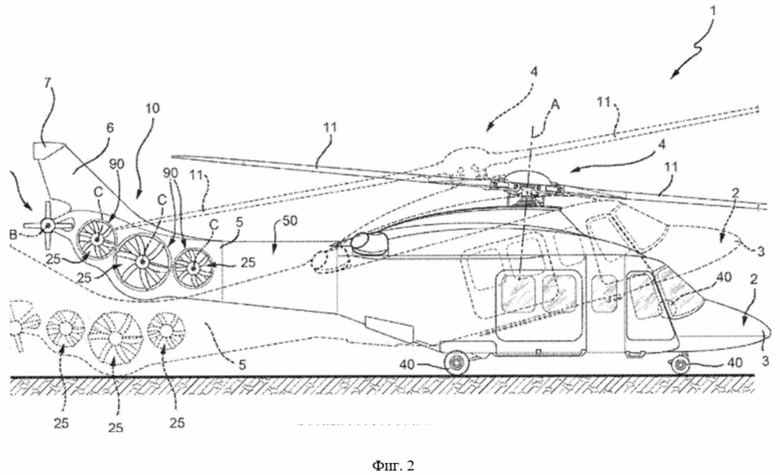
1. Вертолет (1), включающий:
- фюзеляж (2);
- первый несущий винт (4), выполненный с возможностью создания необходимого подъема для полета указанного вертолета (1) и перемещения вперед/назад, вверх/вниз и бокового перемещения указанного вертолета (1) и создания первого крутящего момента (С1) на указанном фюзеляже (2);
- систему (10) противовращения, выполненную с возможностью создания второго крутящего момента (C2), имеющего основной компонент в том же или противоположном направлении относительно указанного первого крутящего момента (C1), для управления углом рыскания указанного вертолета (1); и
- хвостовой участок (5), соединенный с фюзеляжем (2);
хвостовой участок (5), в свою очередь, содержит:
хвостовую балку (50), соединенную с фюзеляжем (2);
ребро (6), выступающее из задней части хвостовой балки (50) на противоположной стороне фюзеляжа (2) и в поперечном направлении относительно хвостовой балки (50); и
хвостовую плоскость (7), выступающую консольно с обеих сторон указанного ребра (6);
указанная хвостовая балка (50) выполнена с возможностью выдерживания изгибающих моментов и напряжения сдвига, создаваемого весом указанного ребра (6) и указанной хвостовой части (7);
отличающийся тем, что система (10) противовращения выполнена за одно целое c хвостовой балкой (50) и содержит:
- блок (15) электропитания;
- по меньшей мере один второй винт (17), соединенный с указанным блоком (15) электропитания и работающий посредством указанного блока (15) электропитания, для вращения с первой переменной угловой скоростью; и
- по меньшей мере один третий винт (25), соединенный с указанным блоком (15) электропитания и работающий посредством указанного блока (15) электропитания, для вращения со второй переменной угловой скоростью.
2. Вертолет по п. 1, отличающийся тем, что он включает группу указанных вторых винтов (25), вращающихся вокруг соответствующих осей (С), расположенных в шахматном порядке друг от друга.
3. Вертолет по п. 2, отличающийся тем, что по меньшей мере один из указанных вторых винтов (25) установлен посредством соответствующего воздуховода (90).
4. Вертолет по п. 2, отличающийся тем, что включает один воздуховод (91), в котором установлены по меньшей мере два вторых винта (25).
5. Вертолет по любому из предыдущих пунктов, отличающийся тем, что указанная система (10) противовращения неподвижно соединена и выполнена за одно целое с хвостовым участком (5).
6. Вертолет по любому из предыдущих пунктов, отличающийся тем, что хвостовая плоскость (7) расположена на свободном конце ребра (6), противоположном заднему концу хвостовой балки (50).
7. Вертолет по любому из предыдущих пунктов, отличающийся тем, что включает:
- по меньшей мере одну силовую установку (100) и
- коробку (101) передач, приводимую в действие указанной силовой установкой (100) и приводимую в действие для привода указанного первого винта (4); а
указанный блок (15) электропитания содержит электрическую двигательную систему (110, 110’, 110’’, 110’’’), соединенную с указанной силовой установкой (100) и с указанным вторым и третьим винтами (17, 25) для питания указанного второго и третьего винтов (17, 25) электрической мощностью.
8. Вертолет по п. 7, отличающийся тем, что он включает распределительную электрическую сеть (103), электрически соединенную с указанным вторым и третьим винтами (17, 25), для питания их электрическим питанием; а
указанная электрическая двигательная система (110, 110’, 110’′, 110’’’) питается указанной электрической мощностью посредством указанной распределительной электрической сети (103).
9. Вертолет по п. 7 или 8, отличающийся тем, что электрическая двигательная система (110, 110’’) содержит первый электрический генератор (111, 111’’), расположенный между указанной коробкой передач (101) и вторым и третьим винтами (17, 25).
10. Вертолет по п. 9, отличающийся тем, что первый электрический генератор (111) представляет собой одностороннюю электрическую машину, выполненную с возможностью преобразовывать механическую мощность, снабжаемую указанной коробкой передач (101), в электрическую мощность, подаваемую на указанный второй и третий винты (17, 25).
11. Вертолет по п. 9, отличающийся тем, что указанный первый электрический генератор (111’’) представляет собой двустороннюю электрическую машину, выполненную с возможностью:
- преобразовывать механическую мощность, снабжаемую указанной коробкой передач (101), в электрическую мощность, подаваемую на второй и третий винты (17, 25); или
- преобразовывать электрическую мощность указанной распределительной электрической сети (103) в указанную коробку (101) передач и, следовательно, в первый винт (4).
12. Вертолет по п. 11, отличающийся тем, что электрическая двигательная система (110, 110’) содержит устройство (112’’) накопления энергии, которое электрически соединено с указанной распределительной электрической сетью (103);
указанное устройство (112’’) накопления энергии заряжается указанной распределительной электрической сетью (103) при нормальной работе указанного первого электрического генератора (111’’);
указанное устройство (112’’) накопления энергии питает указанную распределительную электрическую сеть (103) при выходе из строя указанного первого электрического генератора (111’’).
13. Вертолет по п. 7 или 8, отличающийся тем, что электрическая двигательная система (110’, 110’’’) содержит по меньшей мере один второй электрический генератор (120’, 120’’’), расположенный между указанной силовой установкой (100) и указанной распределительной электрической сетью (103).
14. Вертолет по п. 13, отличающийся тем, что включает свободное колесо (152), расположенное между силовой установкой (100) и коробкой (101) передач; а
указанная электрическая двигательная система (110’, 110’’’) соединена с указанной силовой установкой (100) так, что указанное свободное колесо (152) также расположено между указанной коробкой передач (101) и указанной электрической двигательной системой (110’, 110’’’).
15. Вертолет по п. 14, отличающийся тем, что указанный второй генератор (120’) представляет собой одностороннюю электрическую машину, выполненную с возможностью преобразовывать механическую мощность, снабжаемую указанной силовой установкой (100), в электрическую мощность, подаваемую на указанный второй и третий винты (17, 25).
16. Вертолет по п. 14, отличающийся тем, что указанный второй генератор (120’’) представляет собой двустороннюю электрическую машину, которая выполнена с возможностью:
- преобразовывать механическую мощность, снабжаемую указанной силовой установкой (100), в электрическую мощность, подаваемую на указанный второй и третий винты (17, 25); или
- преобразовывать электрическую мощность указанной распределительной электрической сети (103) в указанную силовую установку (100) и, следовательно, в указанный первый винт (4).
17. Вертолет по п. 16, отличающийся тем, что указанный второй генератор (120’’’) встроен в указанную силовую установку (100).
18. Вертолет по п. 7, любому из пп. 13-17, отличающийся тем, что включает дополнительную базовую распределительную сеть (102), установленную для электрической подачи маломощных электрических нагрузок (150);
указанный второй генератор (120’, 120’’’) является генератором двойного напряжения, который питает указанную распределительную электрическую сеть (103) и указанную дополнительную базовую распределительную сеть (102) двумя уровнями напряжений.
19. Вертолет по любому из пп. 13-18, отличающийся тем, что указанная электрическая двигательная система (110’, 110’’) содержит устройство (112’’’) накопления энергии, которое электрически подключено к указанной распределительной электрической сети (103);
указанное устройство (112’’) накопления энергии заряжается указанной распределительной электрической сетью (103) при нормальной работе указанного второго электрического генератора (120’, 120’’’);
указанное устройство (112’’) накопления энергии питает указанную распределительную электрическую сеть (103) при выходе из строя указанного второго электрического генератора (120’, 120’’’).
20. Вертолет (1), включающий:
- фюзеляж (2);
- первый несущий винт (4), который выполнен с возможностью создания необходимого подъема для полета указанного вертолета (1) и перемещения вперед/назад, вверх/вниз и бокового перемещения указанного вертолета (1) и создания первого крутящего момента (С1) на указанном фюзеляже (2);
- систему (10) противовращения, выполненную с возможностью создания второго крутящего момента (C2), имеющего основной компонент в том же или противоположном направлении относительно указанного первого крутящего момента (C1), для управления углом рыскания указанного вертолета (1);
отличающийся тем, что указанная система (10) противовращения содержит:
- блок (15) электропитания и
- по меньшей мере один второй винт (17), соединенный с указанным блоком (15) электропитания и работающий посредством указанного блока (15) электропитания, для вращения с первой переменной угловой скоростью;
- по меньшей мере один третий винт (25), соединенный с указанным блоком (15) электропитания и работающий посредством указанного блока (15) электропитания, для вращения со второй переменной угловой скоростью;
хвостовой участок (5), соединенный с указанным фюзеляжем (2) и поддерживающий указанный второй и третий винты (17, 25);
хвостовой участок (5), в свою очередь, содержит:
- группу стенок (35), поддерживающих соответствующие второй и третий винты (17, 25);
- группу отверстий (37), ограниченных указанными стенками (35), проходящих через указанный хвостовой участок (5) и имеющих достаточную ширину для правильной подачи воздуха ко второму и третьему винтам (17, 25).
21. Вертолет по п. 20, отличающийся тем, что он включает группу указанных третьих винтов (25).
22. Вертолет по п. 21, отличающийся тем, что по меньшей мере один из указанных третьих винтов (25) имеет воздуховод.
23. Вертолет по любому из предыдущих пунктов, отличающийся тем, что указанный блок (15) электропитания, в свою очередь, содержит:
- по меньшей мере один первый электрический двигатель (16), соединенный с указанным вторым винтом (17) и выполненный с возможностью приведения в действие указанного второго винта (17); и
- группу вторых электрических двигателей (24), соединенных с соответствующими указанными третьими винтами (25) и выполненных с возможностью приведения в действие соответствующих указанных третьих винтов (25).
24. Вертолет по п. 23, отличающийся тем, что:
- указанный первый электрический двигатель (16) непосредственно соединен с указанным вторым винтом (17); и/или
- по меньшей мере один из указанных вторых электрических двигателей (24) непосредственно соединен с соответствующим указанным третьим винтом (25).
25. Вертолет по любому из предыдущих пунктов, отличающийся тем, что каждый из указанных второго и третьего винтов (17, 25) содержит:
- втулку (18, 26), вращающуюся вокруг соответствующей оси вращения (B, C); и
- группу лопастей (19, 27), поддерживаемых указанной втулкой (18, 26), каждая из которых имеет фиксированный угол наклона относительно указанной соответствующей оси вращения (B, C).
26. Вертолет по п. 25, отличающийся тем, что он включает блок (30) управления, соединенный с указанным блоком (15) электропитания и запрограммированный для:
- вызова вращения указанного первого винта (16) в первом направлении вращения и указанного третьего винта (25) во втором направлении вращения, противоположном указанному первому направлению, в условиях полета указанного вертолета (1), в котором указанный первый крутящий момент (C1) ниже порогового значения; и/или
- вызова вращения указанного второго винта (17) также в указанном втором направлении, когда указанный первый крутящий момент (С1) выше указанного порогового значения; и/или
- увеличения указанной скорости вращения второго винта (17) в указанном первом направлении и уменьшения указанной скорости вращения указанного по меньшей мере одного второго винта (25) в указанном втором направлении, если указанный вертолет (1) вращается в том же направлении, что и указанный первый крутящий момент (С1).
27. Вертолет по п. 26, отличающийся тем, что указанное второе направление вращения указанных вторых или третьих винтов (17, 25) создает третий крутящий момент на указанном фюзеляже (2), имеющем основной компонент в противоположном направлении относительно указанного первого крутящего момента (С1).
28. Вертолет (1), включающий:
- фюзеляж (2);
- первый несущий винт (4), который выполнен с возможностью создания необходимого подъема для полета указанного вертолета (1) и перемещения вперед/назад, вверх/вниз и бокового перемещения указанного вертолета (1) и создания первого крутящего момента (С1) на указанном фюзеляже (2);
- систему (10) противовращения, выполненную с возможностью создания второго крутящего момента (C2), имеющего основной компонент в том же или противоположном направлении относительно указанного первого крутящего момента (C1), для управления углом рыскания указанного вертолета (1); и
- хвостовой участок (5), соединенный с указанным фюзеляжем (2);
указанный хвостовой участок (5), в свою очередь, содержит:
хвостовую балку (50), соединенную с указанным фюзеляжем (2);
ребро (6), выступающее от заднего конца указанной хвостовой балки (50) на противоположной стороне указанного фюзеляжа (2) и в поперечном направлении относительно указанной хвостовой балки (50); и
хвостовую плоскость (7), выступающую консольно с обеих сторон указанного ребра (6);
причем указанная хвостовая балка (50) выполнена с возможностью выдерживания изгибающих моментов и напряжения сдвига, создаваемого весом указанного ребра (6) и указанного хвостового участка (7);
отличающийся тем, что указанная система (10) противовращения выполнена за одно целое с указанной хвостовой балкой (50);
указанная система (10) противовращения дополнительно содержит:
- блок (15) электропитания;
- по меньшей мере один второй винт (17) соединен с указанным блоком (15) электропитания и работает посредством указанного блока (15) электропитания, для вращения с первой переменной угловой скоростью; и
- по меньшей мере один третий винт (25) соединен с указанным блоком (15) электропитания и работает посредством указанного блока (15) электропитания, для вращения со второй переменной угловой скоростью;
указанный вертолет (1) дополнительно включает:
- по меньшей мере одну силовую установку (100); и
- коробку (101) передач, приводимую в действие указанной силовой установкой (100) и выполненную с возможностью привода указанного первого винта (4);
указанный блок (15) электропитания содержит, в свою очередь, электрическую двигательную систему (110’’’), соединенную с указанной силовой установкой (100) и с указанным вторым и третьим винтами (17, 25), для питания указанных второго и третьего винтов (17, 25) электрической мощностью;
указанный вертолет (1) дополнительно включает электрическую распределительную сеть (103), электрически соединенную с указанным вторым и третьим винтами (17, 25) для питания их электрической мощностью;
указанная электрическая двигательная система (110’’’) питает указанную распределительную электрическую сеть (103) указанной электрической мощностью;
указанная электрическая двигательная система (110’’’) содержит по меньшей мере один первый электрический генератор (120’’’), расположенный между указанной силовой установкой (100) и указанной распределительной электрической сетью (103);
указанная электрическая двигательная система (110’’’) содержит устройство (112’’) накопления энергии, которое электрически подключено к указанной распределительной электрической сети (103);
указанное устройство (112’’) накопления энергии заряжается указанной распределительной электрической сетью (103) при нормальной работе указанного второго электрического генератора (120’’’);
указанное устройство (112’’) накопления энергии питает указанную распределительную электрическую сеть (103) при выходе из строя указанного второго электрического генератора (120’’’);
указанная силовая установка (100) представляет собой газовую турбину, которая по существу содержит:
- передний компрессор (95), который увеличивает давление воздушного потока, всасываемого из внешней среды;
- камеру (96) сгорания, в которой топливо, хранящееся в топливном баке (97), распыляется в воздушный поток и зажигается, для повышения температуры смеси воздуха и сгоревшего газа; и
- заднюю турбину (98), в которой указанная смесь расширяется и приводит во вращение вал (99), который соединен с указанной коробкой (101) передач посредством установки свободного колеса (152);
указанный второй генератор (120’’’) выполнен за одно целое с указанной силовой установкой (100);
указанный второй электрический генератор (120’’’) является двухсторонней электрической машиной;
указанный второй электрический генератор (120’’’) является двигателем-генератором;
указанный второй электрический генератор (120’’’) выполнен с возможностью или преобразовывать часть механической мощности, подаваемой указанным валом (99), в электрическую мощность, предоставляемую указанной электрической вспомогательной распределительной сетью (103), при нормальной работе указанных силовых установок (100); или
указанный второй электрический генератор (120’’’) выполнен с возможностью преобразовывать электрическую мощность, подаваемую электрической распределительной сетью (103), в механическую мощность, доступную для указанного вала (99) и, следовательно, для указанной главной коробки (101) передач при выходе из строя указанных силовых установок (100) или если требуется повышенная мощность из-за особо тяжелых условий с точки зрения рабочей температуры и рабочей высоты.
29. Вертолет по п. 28, отличающийся тем, что он дополнительно включает группу указанных вторых винтов (25), вращающихся вокруг соответствующих осей (С), расположенных в шахматном порядке друг от друга, и один воздуховод (91), в котором установлены по меньшей мере два вторых винта (25).
30. Вертолет по п. 28 или 29, отличающийся тем, что включает дополнительную распределительную сеть (102), установленную для электрической подачи маломощных электрических нагрузок (150); и в котором указанный второй электрический генератор (120’’’) представляет собой генератор двойного напряжения, который питает указанную распределительную электрическую сеть (103) и указанную дополнительную базовую распределительную сеть (102) двумя уровнями напряжений.
| US 5102067 A1, 07.04.1992 | |||
| EP 3254962 B1, 15.05.2019 | |||
| DE 102010021026 A1, 24.11.2011 | |||
| US 20090140095 A1, 04.06.2009 | |||
| РУЛЕВОЙ ВИНТ ВЕРТОЛЕТА, УСТАНОВЛЕННЫЙ В ТУННЕЛЕ | 2013 |
|
RU2538497C1 |
| УСТРОЙСТВО ДЛЯ ГАШЕНИЯ ВРАЩАЮЩЕГО МОМЕНТА, ПРЕДНАЗНАЧЕННОЕ ДЛЯ ВЕРТОЛЕТА | 1995 |
|
RU2138422C1 |

