Изобретение относится к области ракетостроения и может быть использовано для управления положением камер сгорания жидкостных ракетных двигателей.
Известна цифровая электромеханическая следящая система управления - аналог (Белицкий Д.С., Жарков М.Н., Стоялов В.В., Шутенко В.И. Электромеханический привод в системе управления режимами жидкостных ракетных двигателей. Известия Академии наук. Теория и системы управления, 1996, №1, С. 118-124.), предназначенная для управления режимом работы жидкостного ракетного двигателя второй ступени ракеты носителя «Энергия». Это устройство содержит формирователь командного сигнала - цифровую вычислительную машину, работающую в семиразрядном двоичном коде, подключенную к автономному вычислительному устройству, которое через усилительно-преобразовательное устройство и непосредственно соединено электрически с электромеханическим приводом, при этом выходной вал электромеханического привода прикреплен к объекту управления.
Работа цифровой электромеханической следящей системы управления осуществляется путем сравнения управляющих кодов, вырабатываемых цифровой вычислительной машиной, и кодами сигналов обратной связи, поступающих от электромеханического привода, при этом останов вала электромеханического привода происходит при совпадении этих кодов. В этой системе управления функции устройства сравнения и управления электродвигателями выполняет автономное вычислительное устройство, работающее с собственным тактом квантования, независимо по отношению к формирователю командного сигнала - цифровой вычислительной машине. Точность позиционирования такой цифровой электромеханической следящей системы при семиразрядном двоичном коде обеспечивается на уровне не более ±1% от диапазона регулирования.
Недостатком такой системы является невозможность использования в электромеханических приводах некоторых видов электродвигателей постоянного тока, в частности щеточных, из-за возможности разрушения щеток электродвигателей под действием вибраций и ударов, создаваемых жидкостным ракетным двигателем при его работе, так как в такой системе электромеханические приводы контактируют непосредственно с камерой сгорания. В цифровой электромеханической следящей системе управления - аналоге применялся бесконтактный моментный электродвигатель, коммутатор которого был выполнен отдельным устройством, которое располагалось на раме жидкостного ракетного двигателя и соединялось с исполнительной частью электродвигателя посредством кабеля, а электромеханический привод устанавливался на камере сгорания жидкостного ракетного двигателя через амортизатор. Кроме этого, подобные бесконтактные моментные электродвигатели выпускаются сравнительно малой мощности, а большая мощность не требуется, так как элетромеха-нический привод управляет положением малоинерционной заслонки.
Известна система управления вектором тяги жидкостного ракетного двигателя - прототип (Белоногов О.Б., Жарков М.Н., Кудрявцев В.В., Степан Г.Α., Черток Б.Е., Шутенко В.И. / Особенности схемно-конструктивных решений и функционирования электрогидравлических рулевых машин ракет (краткий технико-исторический обзор) // Ракетно-космическая техника. Сер. XII. 1998. Вып. 3-4. С. 3-25.), содержащая раму с карданным подвесом и установленный в карданном подвесе жидкостной ракетный двигатель, проушины которого посредством шариковых сферических подшипников соединнены со штоками силовых гидроцилиндров двух электрогидравлических рулевых машин, установленных на раме в двух взаимно-перпендикулярных плоскостях, при этом основания силовых гидроцилиндров рулевых машин посредством шариковых сферических подшипников прикреплены к проушинам рамы, а электронасосные агрегаты рулевых машин вместе с расположенными в них узлами управления также прикреплены к раме в двух взаимно-перпендикулярных плоскостях и каждый электронасосный агрегат рулевой машины двумя трубопроводами сообщается со своим силовым гидроцилиндром, причем аппаратура обратной связи каждого из двух каналов системы управления вектором тяги жидкостного ракетного двигателя, исполняющая роль автономного вычислительного устройства и усилителя командных сигналов, содержащая аналого-цифровой преобразователь, устройство сравнения и усилительное устройство, электрически соединена с формирователем командных сигналов, с аналоговыми датчиками обратной связи, установленными в силовых гидроцилиндрах и узлами управления, расположенными в электронасосных агрегатах электрогидравлических рулевых машин, а электродвигатели электронасосных агрегатов электрогидравлических рулевых машин электрически соединены с источником постоянного тока.
Такая система управления вектором тяги осуществляет управление положением ракетного двигателя, обладающего значительным моментом инерции. Работа системы осуществляется путем сравнения в устройствах сравнения аппаратуры обратной связи управляющего сигнала в виде двоичного кода, вырабатываемого формирователем командных сигналов - бортовой цифровой вычислительной машиной, и двоичного кода, поступающего от аналого-цифрового преобразователя аппаратуры обратной связи, в котором оцифровываются сигналы о положениях выходного штока силового гидроцилиндра электрогидравлической рулевой машины, поступающих от ее аналоговых датчиков обратной связи, при этом останов штока силового гидроцилиндра электрогидравлической рулевой машины происходит при совпадении этих кодов. В этой системе функции оцифровки аналоговых сигналов, функции устройства сравнения и усиления сигналов управления каждой электрогидравлической рулевой машиной исполняет свое автономное вычислительное устройство - аппаратура обратной связи, работающее с собственным тактом квантования, независимо по отношению к формирователю командного сигнала - бортовой цифровой вычислительной машине. Поскольку электронасосные агрегаты рулевых машин устанавливаются на раме, их электродвигатели не испытывают значительные вибрации и удары, создаваемые жидкостным ракетным двигателем. Поэтому в них допустимо использование мощных щеточных электродвигателей постоянного тока. Кроме этого наличие в системе шариковых сферических подшипников обеспечивает возможность поворота камеры сгорания жидкостного ракетного двигателя одновременно в двух взаимно-перпендикулярных плоскостях.
Недостатком такой системы управления вектором тяги жидкостного ракетного двигателя является низкая точность слежения из-за применения аналоговых датчиков обратной связи (до ±15% от диапазона регулирования) и невозможность использования системы для дальних полетов в космическом пространстве из-за застывания рабочей жидкости в рулевых машинах при их длительном пребывании в условиях низких температур космического пространства.
Задачей изобретения является расширение функциональных и технических возможностей системы управления вектором тяги жидкостного ракетного двигателя и обеспечение возможности ее использования для дальних полетов в космическом пространстве при длительном пребывании в условиях низких температур космического пространства и в условиях воздействия вибраций и ударов, вырабатываемых жидкостным ракетным двигателем.
Техническим результатом изобретения является одновременное повышение точности слежения системы управления вектором тяги жидкостного ракетного двигателя.
Технический результат достигается тем, что в систему управления вектором тяги жидкостного ракетного двигателя, содержащий раму с карданным подвесом под установку жидкостного ракетного двигателя, проушины и сферические шариковые подшипники, расположенные в двух взаимно-перпендикулярных плоскостях, а также формирователь командного сигнала, электрически соединенный с двумя автономными вычислительными устройствами, в отличие от прототипа, каждое автономное вычислительное устройство через свое усилительно-преобразовательное устройство и непосредственно соединено электрически со своим электромеханическим приводом, при этом оба электромеханических привода установлены на раме в двух взаимно-перпендикулярных плоскостях, а валы электромеханических приводов соединены с камерой сгорания жидкостного ракетного двигателя посредством шарнирно-рычажных механизмов, выполненных из рычага и тяги, причем рычаг каждого шарнирно-рычажного механизма одним концом жестко закреплен на валу своего электромеханического привода, а вторым концом посредством шарикового сферического подшипника прикреплен к одному из концов тяги шарнирно-рычажного механизма, при этом одна тяга своим вторым концом посредством шарикового сферического подшипника прикреплена к проушине камеры сгорания жидкостного ракетного двигателя, а другая тяга своим вторым концом посредством шарикового сферического подшипника прикреплена к проушине внешней рамки карданного подвеса.
Благодаря такой конструкции системы управления вектором тяги жидкостного ракетного двигателя, т.е. установке электромеханических приводов на раме, где они не испытывают значительные вибрации и удары, создаваемые жидкостным ракетным двигателем, обеспечивается применимость мощных щеточных электродвигателей постоянного тока. При этом применение в системе управления вектором тяги жидкостного ракетного двигателя семиразрядного двоичного кода обеспечивает точность позиционирования на уровне менее ±1% от диапазона регулирования, что значительно повышает точность позиционирования по сравнению с прототипом. А поскольку в электромеханических приводах отсутствует рабочая жидкость, такая система управления вектором тяги жидкостного ракетного двигателя пригодна для дальних полетов в космическом пространстве при длительном пребывании в условиях низких температур космического пространства.
Совокупность всех указанных существенных признаков обеспечивает одновременное повышение точности слежения системы управления вектором тяги жидкостного ракетного двигателя и обеспечение возможности ее использования для дальних полетов в космическом пространстве при длительном пребывании в условиях низких температур космического пространства и в условиях воздействия вибраций и ударов, вырабатываемых жидкостным ракетным двигателем, что значительно расширяет функциональные и технические возможности системы управления вектором тяги жидкостного ракетного двигателя.
Так как заявленная совокупность существенных признаков системы управления вектором тяги жидкостного ракетного двигателя позволяет решить поставленную задачу, то заявленная система управления вектором тяги жидкостного ракетного двигателя соответствуют критерию "изобретательский уровень".
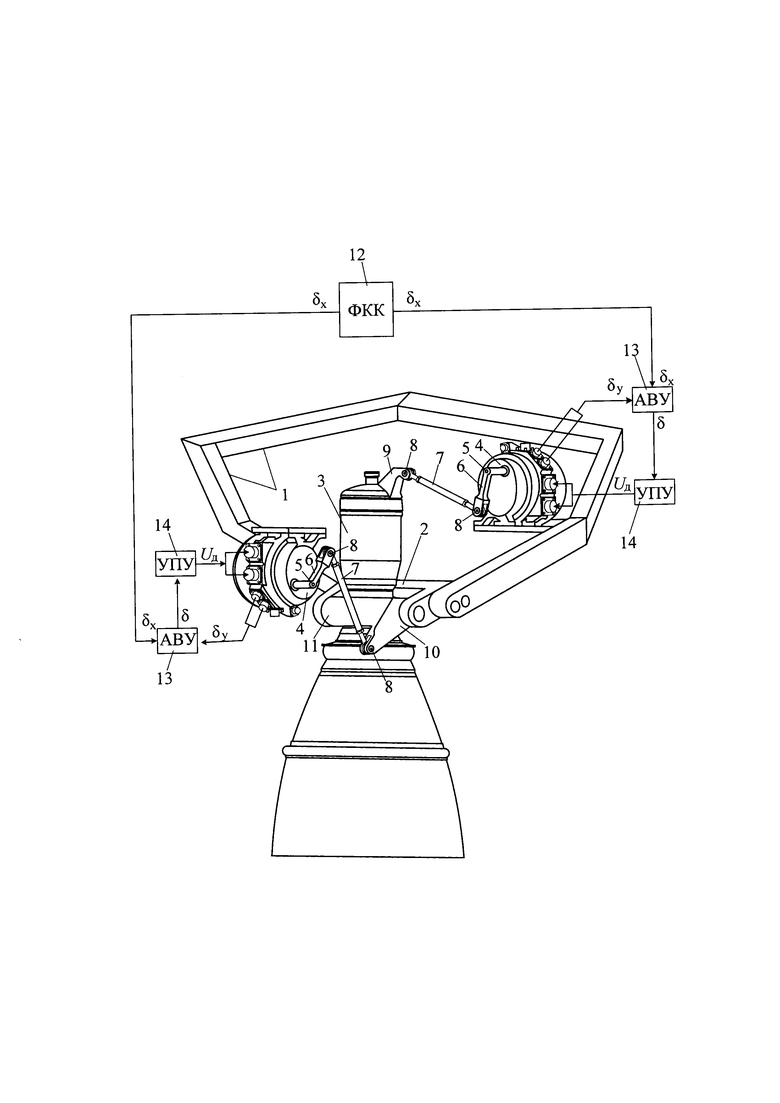
Заявленная система управления вектором тяги жидкостного ракетного двигателя иллюстрируется фигурой, на которой изображена конструкционная схема системы управления вектором тяги жидкостного ракетного двигателя.
Система управления вектором тяги жидкостного ракетного двигателя содержит раму 1 с карданным подвесом 2 и установленный в карданном подвесе жидкостной ракетный двигатель 3. На раме 1 в двух взаимно-перпендикулярных плоскостях управления установлены электромеханические приводы 4. В ракетной технике плоскостями управления являются плоскости тангажа и рыскания ракеты. Валы 5 электромеханических приводов соединены с жидкостным ракетным двигателем 3 посредством шарнирно-рычажных механизмов, выполненных из рычага 6 и тяги 7, причем рычаг 6 каждого шарнирно-рычажного механизма одним концом жестко закреплен на вале 5 своего электромеханического привода, а вторым концом посредством шарикового сферического подшипника 8 прикреплен к одному из концов тяги 7 шарнирно-рычажного механизма, при этом одна тяга 7 своим вторым концом посредством шарикового сферического подшипника 8 прикреплена к проушине 9 камеры сгорания жидкостного ракетного двигателя 3, а другая тяга 7 своим вторым концом посредством шарикового сферического подшипника 8 прикреплена к проушине 10 внешней рамки 11 карданного подвеса 2. Формирователь командного сигнала системы управления вектором тяги жидкостного ракетного двигателя - бортовая цифровая вычислительная машина 12, работающая в семиразрядном двоичном коде, подключена к двум автономным вычислительным устройствам 13, каждое из которых через усилительно-преобразовательные устройства 14 и непосредственно соединены электрически со своими электромеханическими приводами 4.
Система управления вектором тяги жидкостного ракетного двигателя работает следующим образом.
Формирователь командного сигнала системы управления вектором тяги жидкостного ракетного двигателя - бортовая цифровая вычислительная машина 12 выдает в автономные вычислительные устройства 13 каждого из двух каналов управления семиразрядные двоичные коды, соответствующие требуемым углам поворота жидкостного ракетного двигателя 3 в карданном подвесе 2 в соответствующих плоскостях управления (плоскостях тангажа и рыскания). Если коды, вырабатываемые электромеханическими приводами 4 соответствующих плоскостей не совпадают с кодами, вырабатываемыми для этих плоскостей управления формирователем командного кода 12, то на электромеханические приводы 4 через усилительно-преобразовательные устройства подаются напряжения, полярности которых соответствуют разности кодов. В результате валы 5 электромеханических приводов вместе с рычагами 6 шарнирно-рычажных механизмов поворачиваются, а присоединенные к рычагам 6 посредством шариковых сферических подшипников 8 тяги 7 шарнирно-рычажных механизмов посредством шариковых сферических подшипников 8 воздействуют в одной плоскости управления на проушину 9 жидкостного ракетного двигателя 3, а во второй плоскости управления на проушину 10 внешней рамки 11 карданного подвеса 2, в результате чего жидкостной ракетный двигатель начинает поворачиваться в каждой из двух плоскостей управления и останавливается в требуемом формирователем командных кодов 12 положении при совпадении вырабатываемых ей кодов с кодами, вырабатываемыми электромеханическими приводами обеих плоскостей управления.
Таким образом, заявленная система управления жидкостным ракетным двигателем с повышенной точностью слежения способна работать в условиях дальних полетов в космическом пространстве при длительном пребывании в условиях низких температур, в условиях воздействия вибраций и ударов, вырабатываемых жидкостным ракетным двигателем и может быть применена в пилотируемых и грузовых космических кораблях, разгонных блоках дальнего действия и в межорбитальных буксирах.
Литература
1. Белицкий Д.С., Жарков М.Н., Стоялов В.В., Шутенко В.И. / Электромеханический привод в системе управления режимами жидкостных ракетных двигателей. // Известия Академии наук. Теория и системы управления, 1996, №1, с. 118-124 - аналог.
2. Белоногов О.Б., Жарков М.Н., Кудрявцев В.В., Степан Г.А., Черток Б.Е., Шутенко В.И. / Особенности схемно-конструктивных решений и функционирования электрогидравлических рулевых машин ракет (краткий технико-исторический обзор) // Ракетно-космическая техника. Сер. XII. 1998. Вып. 3-4. С. 3-25. - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| КАРДАННЫЙ ПОДВЕС ЖИДКОСТНОГО РАКЕТНОГО ДВИГАТЕЛЯ | 2014 |
|
RU2556762C1 |
| Двигательная установка с жидкостными ракетными двигателями | 2023 |
|
RU2826196C1 |
| СИЛОВАЯ УСТАНОВКА УПРАВЛЯЕМОГО РАКЕТНОГО АППАРАТА НА ЖИДКОМ ТОПЛИВЕ | 1999 |
|
RU2163304C1 |
| УСТРОЙСТВО ДЛЯ ВОСПРИЯТИЯ ТЯГИ И ПРОТОКА ДВУХ КОМПОНЕНТОВ ТОПЛИВА | 2013 |
|
RU2555065C2 |
| УЗЕЛ КАЧАНИЯ КАМЕРЫ ЖИДКОСТНОГО РАКЕТНОГО ДВИГАТЕЛЯ С ДОЖИГАНИЕМ | 1999 |
|
RU2159352C2 |
| ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ | 2013 |
|
RU2524483C1 |
| ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ | 1999 |
|
RU2158838C2 |
| ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ С ДОЖИГАНИЕМ | 1999 |
|
RU2173785C2 |
| КОСМИЧЕСКИЙ АППАРАТ | 1996 |
|
RU2112712C1 |
| АТОМНАЯ ПОДВОДНАЯ ЛОДКА | 2012 |
|
RU2494004C1 |
Изобретение относится к области ракетостроения и может быть использовано для управления положением камер сгорания жидкостных ракетных двигателей. Система управления вектором тяги жидкостного ракетного двигателя содержит раму с карданным подвесом под установку жидкостного ракетного двигателя, два электромеханических привода, закрепленные на раме в двух взаимно перпендикулярных плоскостях, а также формирователь командного сигнала, электрически соединенный с двумя автономными вычислительными устройствами. Каждое автономное вычислительное устройство через свое усилительно-преобразовательное устройство и непосредственно соединено электрически со своим электромеханическим приводом. Валы электромеханических приводов соединены с камерой сгорания жидкостного ракетного двигателя посредством шарнирно-рычажных механизмов, выполненных из рычага и тяги, причем рычаг каждого шарнирно-рычажного механизма одним концом жестко закреплен на валу своего электромеханического привода, а вторым концом посредством шарикового сферического подшипника прикреплен к одному из концов тяги шарнирно-рычажного механизма, при этом одна тяга своим вторым концом посредством шарикового сферического подшипника прикреплена к проушине камеры сгорания жидкостного ракетного двигателя, а другая тяга своим вторым концом посредством шарикового сферического подшипника прикреплена к проушине внешней рамки карданного подвеса. Изобретение обеспечивает возможность использования системы управления вектором тяги с повышенной точностью слежения в условиях дальних полетов в космическом пространстве при длительном пребывании в условиях низких температур, в условиях воздействия вибраций и ударов, вырабатываемых жидкостным ракетным двигателем, может быть применено в пилотируемых и грузовых космических кораблях, разгонных блоках дальнего действия и в межорбитальных буксирах. 1 ил.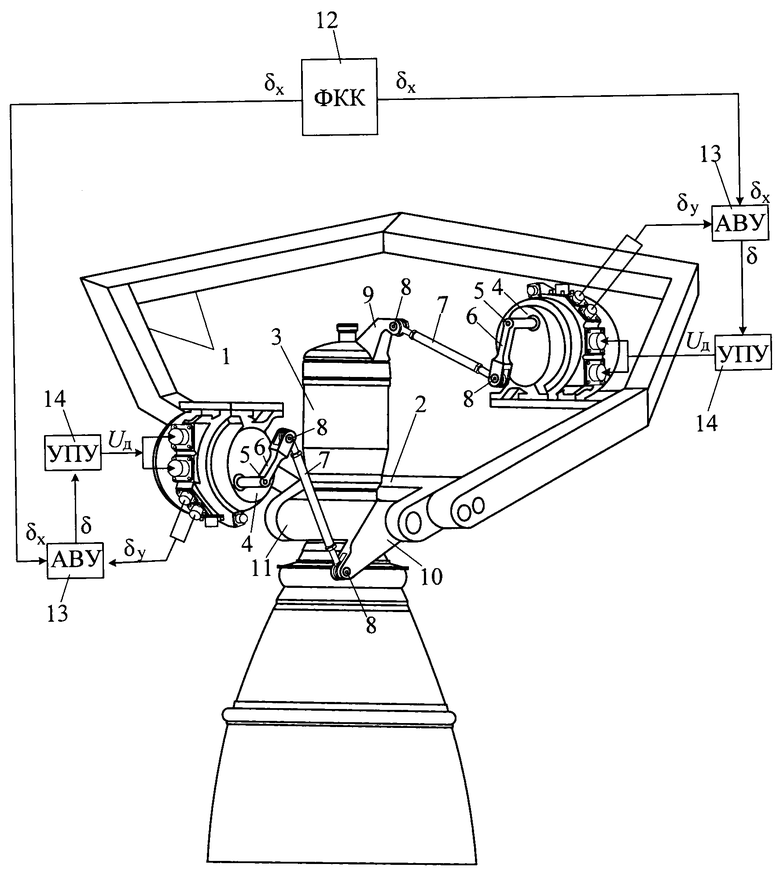
Система управления вектором тяги жидкостного ракетного двигателя, содержащая раму с карданным подвесом под установку жидкостного ракетного двигателя, проушины и сферические шариковые подшипники, расположенные в двух взаимно перпендикулярных плоскостях, а также формирователь командного сигнала, электрически соединенный с двумя автономными вычислительными устройствами, отличающаяся тем, что каждое автономное вычислительное устройство через свое усилительно-преобразовательное устройство и непосредственно соединено электрически со своим электромеханическим приводом, при этом оба электромеханических привода установлены на раме в двух взаимно перпендикулярных плоскостях, а валы электромеханических приводов соединены с камерой сгорания жидкостного ракетного двигателя посредством шарнирно-рычажных механизмов, выполненных из рычага и тяги, причем рычаг каждого шарнирно-рычажного механизма одним концом жестко закреплен на валу своего электромеханического привода, а вторым концом посредством шарикового сферического подшипника прикреплен к одному из концов тяги шарнирно-рычажного механизма, при этом одна тяга своим вторым концом посредством шарикового сферического подшипника прикреплена к проушине камеры сгорания жидкостного ракетного двигателя, а другая тяга своим вторым концом посредством шарикового сферического подшипника прикреплена к проушине внешней рамки карданного подвеса.
| Белоногов О.Б | |||
| и др | |||
| Особенности схемно-конструктивных решений и функционирования электрогидравлических рулевых машин ракет (краткий технико-исторический обзор) | |||
| Ракетно-космическая техника | |||
| Способ и аппарат для получения гидразобензола или его гомологов | 1922 |
|
SU1998A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Способ управления электрогидроприводом системы регулирования вектора тяги жидкостного ракетного двигателя и устройство для его осуществления | 1991 |
|
SU1811566A3 |
| ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ С УПРАВЛЯЕМЫМ ВЕКТОРОМ ТЯГИ | 2019 |
|
RU2707997C1 |
| ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ С РЕГУЛИРУЕМЫМ СОПЛОМ И БЛОК СОПЕЛ КРЕНА | 2010 |
|
RU2441170C1 |
| Способ лечения травм спинного мозга | 1982 |
|
SU1326277A1 |
| US 6170258 B2, | |||

